基于电涡流传感器阵列的布莱叶盲文阅读手环
文献发布时间:2023-06-19 13:51:08
技术领域
本申请涉及信息技术领域,尤其涉及一种基于电涡流传感器阵列的布莱叶盲文阅读手环。
背景技术
现有数据显示,目前全球盲人超过4000万人,而我国有世界数量最大的盲人群体,人数超800万,占世界失明人口的20%。仅我国盲人智能助视器到2025年规模将接近80亿。而盲文作为盲人感知世界、与外界沟通的主要工具,广泛使用与楼宇、交通工具、街道等公共场合,具有不可替代的重要价值。其中,国际通用的布莱叶盲文的盲文阅读主要依靠人类的触觉来实现。而伴随着检测技术的创新与迭代,产生了众多的盲文阅读检测设备,如光感式盲文阅读器以及压力式盲文阅读器,这些检测器件通过光、电、力等物理信号检测与分析,可实现盲文的辅助阅读。但是,光感式盲文阅读器主要通过拍照识别的方式进行盲文的识别,对光源以及拍摄角度有较高的要求,往往需要对同一目标进行多次识别,并不利于盲人在黑暗的条件及单独快速实现大量盲文的阅读。而压力式传感器虽然可以较好的解决上述问题,但其存在需要对盲文进行接触式的检测,当盲文上有污渍时可能会导致识别误差,更关键的,由于这种检测方式的限制,其会对检测器本身以及盲文本身造成损伤,不但不利于使用者本身的长时间使用,同时会影响其他盲人对于公共场合盲文的使用。
电涡流传感器是一种利用电涡流效应原理,能够准确测量被测金属物体与探头端面的相对位置的器件,有长期工作可靠性好、灵敏度高、抗干扰能力强、非接触测量、响应速度快、不受油水等介质的影响等优点,常被用于对大型旋转机械的轴位移、轴振动、轴转速等参数进行长期实时监测。但应用电涡流传感器同时存在以下问题:(1)单一尺寸的电涡流传感器仅在离被测目标一定范围内可保证检测精度,当超出其检测范围将无法正确识别被测目标,而运用多尺寸的电涡流传感器存在信息传递效率及精度低的问题;(2)利用电涡流传感器对布莱叶盲文进行检测同样存在检测角度对检测精度的影响,不同角度下对同一目标的检测结果信号不尽相同;(3)目前电涡流传感器的制造以及安装过程难以实现盲文识别所需要的微型、便携、可穿戴性的要求;(4)由于进行的是非接触式的盲文识别,难以让使用者主观的进行“换行”的操作,而导致检测的不完整,不准确;(5)由于进行的是非接触式的检测,检测装置难以判断使用者的主观意志,是否需要对检测目标进行识别。
发明内容
本申请提供了一种基于电涡流传感器阵列的布莱叶盲文阅读手环,其技术目的是解决单一尺寸的电涡流传感器检测范围的限制问题、多尺寸电涡流传感器存在的信息传递效率及精度问题、电涡流传感器对布莱叶盲文进行检测时存在的检测角度影响检测精度的问题以及电涡流传感器的微型、便携、可穿戴性问题。
本申请的上述技术目的是通过以下技术方案得以实现的:
一种基于电涡流传感器阵列的布莱叶盲文阅读手环,将该手环按照0°(360°)、90°、180°、270°的角度划分成四个方位,在手环的0°方位设有FPGA芯片、蓝牙芯片、震动芯片和电涡流传感器阵列,在手环的180°方位设有电源模块和检测开关,在手环的90°和270°方位都设有一组陀螺仪芯片和加速度芯片;所述电源模块用于给手环供电;所述检测开关用于控制手环的开启;
所述电涡流传感器阵列包括多个传感器单元,每个所述传感器单元包括一个外径为50mm的电涡流传感器和至少一个传感器组,所述传感器组设在所述50mm电涡流传感器的四周,所述传感器组包括外径分别为15mm、10mm、5mm、2mm的电涡流传感器;
所述50mm电涡流传感器设在所述传感器单元的中央节点处,所述中央节点处设有集线器;15mm电涡流传感器、10mm电涡流传感器、5mm电涡流传感器及2mm电涡流传感器距离所述中央节点的中心距都在[35,38.5]mm之间,且所述15mm电涡流传感器、10mm电涡流传感器、5mm电涡流传感器及2mm电涡流传感器的中心的连线为矩形;
所述集线器用于收集电涡流传感器阵列反馈的信号;
所述FPGA芯片与所述集线器、所述蓝牙芯片、所述震动芯片、所述陀螺仪芯片和所述加速度芯片均连接。
本申请的有益效果在于:本申请所述的基于电涡流传感器阵列的布莱叶盲文阅读手环,通过在手环上设置电涡流传感器阵列,在较大的范围内对被测目标进行检测时提高了检测精度,同时在运用多尺寸的电涡流传感器对目标进行检测时提高其信息传递效率和精度,降低了检测角度对检测精度的影响,且该手环便携、可穿戴。
附图说明
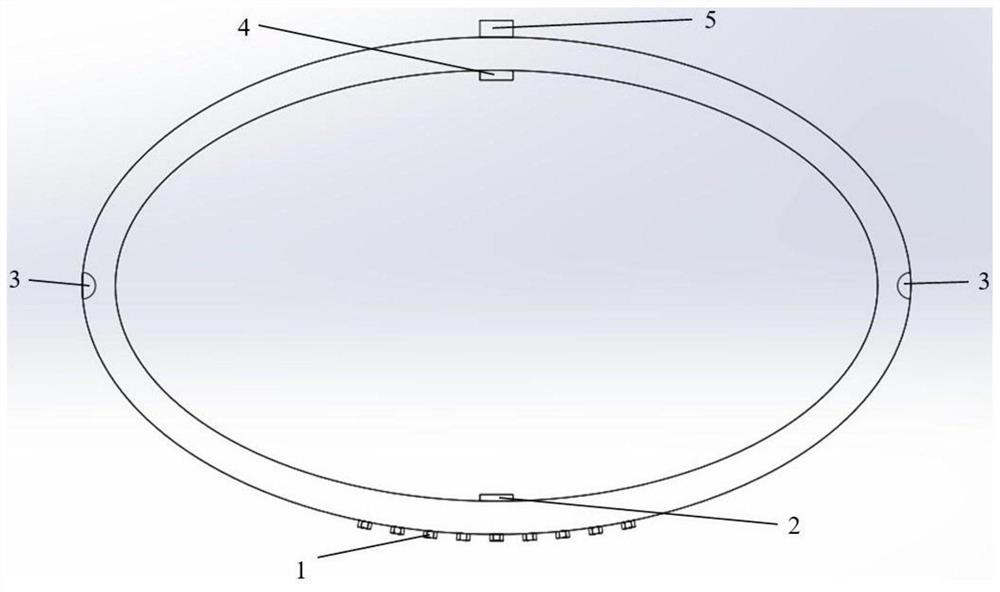
图1为本申请所述布莱叶盲文阅读手环的结构示意图;
图2为电涡流传感器阵列的示意图;
图3为传感器单元的拓扑结构示意图;
图4为单个电涡流传感器的结构示意图;
图中:1-电涡流传感器阵列;2-FPGA芯片、蓝牙芯片及震动芯片的集成;3-陀螺仪芯片、加速度芯片;4-电源模块;5-检测开关;6-传感器单元;7-50mm电涡流传感器;8-15mm电涡流传感器;9-10mm电涡流传感器;10-5mm电涡流传感器;11-2mm电涡流传感器。
具体实施方式
下面将结合附图对本申请技术方案进行详细说明。
图1为本申请所述的基于电涡流传感器阵列的布莱叶盲文阅读手环的结构示意图,如图1所示,将将该手环按照0°(360°)、90°、180°、270°的角度划分成四个方位,在手环的0°方位设有FPGA芯片、蓝牙芯片、震动芯片和电涡流传感器阵列,在手环的180°方位设有电源模块和检测开关,在手环的90°和270°方位都设有一组陀螺仪芯片和加速度芯片。
具体地,在手环的0°集成了FPGA芯片及相应的信号调理电路,可发射电涡流传感器激励信号,分析、处理电涡流传感器阵列反馈的信号、陀螺仪芯片、加速度器芯片等芯片的响应信号,通过对照预设的相应五种尺寸的电涡流传感器的特征阻抗与传感器轴的倾斜度关系表完成电涡流传感器阵列的反馈信号的修正,以此提高手环对于布莱叶盲文的识别、转换精度,并可控制震动芯片、蓝牙芯片等执行器件。
在手环的90°、270°分别集成了一组陀螺仪芯片与加速度芯片,用于感知手环运动状态,并向FPGA芯片传递修正电涡流传感器的响应,进而提高布莱叶盲文的识别精度,同时可在一定条件下向FPGA芯片传递发送震动信号的信号。
FPGA芯片及相应的信号调理电路用于实现从电涡流传感器输入的电信号到文字信号的转换并输出。
陀螺仪芯片以及加速度芯片用于实现电涡流传感器捕捉信号的修正以及对使用者正确使用的提示。
蓝牙芯片用于连接无线耳机等外部设备,并通过处理FPGA芯片传递的蓝牙信号,向外部设备传递声音反馈用以输出手环所翻译的布莱叶盲文。
震动芯片用于通过处理FPGA芯片传递的震动信号产生的震动反馈,给予用户提示信息,如:提示使用者注意平放电涡流传感器,或是注意换行。
电源模块用于为手环的耗电模块提供电源,同时其通过增材制造的方法与手环同时制造,省去了安装过程并提高了安装精度,提高了手环的使用寿命。
检测开关用于对手环是否进行布莱叶盲文检测进行控制,减少使用者在不希望使用时对其正常生活的影响,同时其通过增材制造的方法与手环同时制造,省去了安装过程并提高了安装精度,提高了手环的使用寿命。
电涡流传感器阵列则包括多个传感器单元,每个传感器单元包括一个外径为50mm的电涡流传感器和至少一个传感器组,传感器组设在50mm电涡流传感器的四周,传感器组包括外径分别为15mm、10mm、5mm、2mm的电涡流传感器。电涡流传感器阵列的示意图如图2所示。
具体地,通过识别布莱叶盲文同时对检测目标与电涡流传感器之间距离的监测,随时转换不同尺寸的电涡流传感器对被测目标进行识别,其中外径为50mm的电涡流传感器主要用于与被测目标距离在0.5~1m的远距离、空间分布低的目标的识别,如道路上的导盲道等;外径为15mm、10mm的电涡流传感器主要用于0.1~0.5m的中远距离识别,如楼宇中电梯按钮,指示牌等;外径为5mm、2mm的电涡流传感器主要用于0.1m以内的短距离、空间分布高的目标识别,如盲文书等;同时,这五种尺寸的电涡流传感器应用了应用星形拓扑结构,如图3所示。
一般地,大线圈的特征在于匝数多、灵敏度高、动态响应范围宽、空间分辨率低,用于低分辨率检测及非接触远距离检测;小线圈的特征在于空间分辨率高,用于高分辨率、接触式检测与非接触近距离检测,并且每个电涡流传感器都可同时实现多参量检测,通过监测被测目标与电涡流传感器的位置随时变换传感器单元中合适尺寸的电涡流传感器进行布莱叶盲文的识别,通过监测被测目标形状实现布莱叶盲文的提取,以此提高单次对布莱叶盲文的识别精度。电涡流传感器的结构示意图如图4所示。
作为具体实施例地,50mm电涡流传感器设在传感器单元的中央节点处,中央节点处设有集线器。15mm电涡流传感器、10mm电涡流传感器、5mm电涡流传感器及2mm电涡流传感器距离中央节点的中心距都在[35,38.5]mm之间,基本上四种尺寸的电涡流传感器距中央节点的距离均在37mm左右,便于利用中央节点的集线器收集四种尺寸线圈的参数并传输给FPGA芯片进行处理,以提高五种尺寸电涡流传感器所收集的数据在传输过程中的效率及精度。
同时15mm电涡流传感器、10mm电涡流传感器、5mm电涡流传感器及2mm电涡流传感器的中心的连线为矩形,便于提高增材制造的精度。并且结合陀螺仪芯片以及加速度芯片的信号对被测目标的信号,通过读取预设的相应五种尺寸的电涡流传感器的特征阻抗与传感器轴倾斜度关系表以完成对相应尺寸的电涡流传感器的信号进行修正,降低了使用者在使用过程中手部不规律移动所造成的误差。同时,电涡流传感器阵列以及陀螺仪芯片、加速度芯片,在对被测目标进行识别的同时,会检测手环当前三轴倾斜角度以及所检测范围内被测目标的变化,当倾斜角度过大或检测范围内没有文字后通过反馈不同信号给FPGA芯片,后者传递不同的震动信号给震动芯片,震动芯片产生不同的震动反馈用以给予使用者提示信息,如提示使用者纠正使用姿势,以期提高单次检测的精度以及效率。
作为具体实施例地,15mm电涡流传感器距离中央节点的中心距为37.5mm,10mm电涡流传感器距离中央节点的中心距为35mm,5mm电涡流传感器距离中央节点的中心距为36.25mm,2mm电涡流传感器距离中央节点的中心距为38.5mm。
作为具体实施例地,本申请所述手环上设置的电涡流传感器阵列、电源模块、检测开关以及FPGA芯片、蓝牙芯片、震动芯片、陀螺仪芯片和加速度芯片的安装位置都通过增材制造方法一次打印形成。
具体地,本申请利用增材制造技术的方法一次成形地制作手环,采用不导电的柔性材料作为手环主体的材料,导电的复合树脂作为电涡流传感器的材料,导电的柔性材料作为手环电池以及手环中各模块相关连接电路的材料,利用So l idWorks完成结构绘制后使用多喷头3D打印机完成制作。在手环的主体部分,我们可以根据使用者的手腕部位的相关数据特征,为其定制更加贴合其手腕的手环,同时在手环的90°与270°预留出安装陀螺仪芯片以及加速度芯片的区域,在手环的0°位置预留出安装FPGA芯片以及蓝牙芯片、震动芯片等芯片的区域。在手环的0°位置设计一个贴合手环外圈的含多尺寸电涡流传感器的传感器阵列用于检测金属布莱叶式盲文,在手环内部,利用增材制造技术在打印了相关电路并在手环的180°处打印了集成的电池芯片(电源模块),在手环180°外部打印了一个检测开关。
增材制造方法免去了传统制造方法可能需要的电池、传感器组装、电路粘合等步骤,便于后续芯片的安装,有效地节约了制造时间,降低了制造难度和成本,提高了装置的尺寸精度。本申请的电池以及连接芯片所使用的电路通过增材制造方式一次制作完成,保证了芯片间供电与传递信号的准确性与稳定性,极大的降低了后续步骤中由于电路连接问题导致的传递信息时的信号误差以及不必要的干扰信号,提高了检测的准确性。
同时,增材制造方法相较于其他制造方法,可更加简便以及经济的实现产品的私人化定制,提高使用者的舒适度,同时更加贴合使用者的手环也更有利于使用者通过自身手部动作改善检测的角度以及所检测的范围,一定程度上有利于提高对布莱叶盲文的检测精度。
该手环的工作原理为:当使用者带上手环,打开检测开关5,电源模块4开始给电涡流传感器阵列1、陀螺仪芯片、加速度芯片、以及FPGA芯片、蓝牙芯片、震动芯片供电,使用者通过水平挥动手臂“扫描”金属布莱叶盲文区域,电涡流传感器阵列1通过电涡流效应将线圈的特征阻抗反馈给FPGA芯片,FPGA芯片通过分析电涡流传感器阵列1反馈的线圈的特征阻抗范围,确定被检测目标与电涡流传感器阵列1的距离,并由预先设定的范围读取电涡流传感器阵列中特定尺寸的电涡流传感器所反馈的数值作为识别对象,以其他尺寸的电涡流传感器所反馈的数值作为参考,通过中央节点安装的集线器收集各尺寸的电涡流传感器的信号并传递给FPGA芯片,当用以识别的信号与用以参考的信号相差大于所设定的误差范围时,将通过反馈震动信号以及蓝牙信号给震动芯片以及蓝牙芯片,提醒使用者重新扫描或对设备进行维修。
使用者得到感知的翻译结果,包括声音反馈与震动反馈。当陀螺仪芯片、加速度芯片将使用者手臂瞬时的速度、加速度,以及相对于三个轴的倾斜度数据反馈给FPGA芯片,FPGA芯片通过综合分析陀螺仪芯片、加速度芯片所反馈的速度信号、倾斜度信号以及特定尺寸的电涡流传感器所反馈的线圈特征阻抗的数值,对比预设的倾斜度信号与该尺寸的电涡流传感器线圈的特征阻抗表,对相应特征阻抗信号进行修正,然后对所扫描区域的布莱叶盲文进行识别,识别完成后,反馈蓝牙信号给蓝牙芯片,由蓝牙芯片将声音反馈信号反馈给外设耳机、音响等设备,用以传递翻译结果。同时FPGA芯片通过综合分析倾斜度信号、速度信号、加速度信号,以及当前距离被检测目标的距离,确定下一时刻所使用的电涡流传感器尺寸。
当陀螺仪芯片反馈的倾斜度信号超出所设定的范围或者电涡流传感器阵列1反馈的线圈的特征阻抗过小或者没有波动后,FPGA芯片将反馈震动信号给震动芯片,震动芯片产生的震动反馈,反馈用户提示信息,如:提示使用者注意平放电涡流传感器,或是注意换行。
当电源模块4电量低时FPGA芯片将传递蓝牙信号以及震动信号给蓝牙芯片以及震动芯片,传递声音反馈以及震动反馈给使用者,提醒使用者进行充电。