口腔清洁和/或处理装置及其配置方法
文献发布时间:2023-06-19 18:32:25
技术领域
本发明涉及一种口腔清洁和/或处理装置以及用于配置该装置的操作设置的方法,特别涉及一种使用电磁能用于清洁和/或处理功能的口腔清洁装置。
背景技术
射频(RF)电磁辐射可用于在口腔中提供清洁功能。特别地,口腔清洁装置可以包括用于插入用户口腔中的清洁单元,例如头部,该清洁单元部分包括连接到RF驱动信号发生器的一个或多个电极或线圈。信号发生器利用RF信号发生器驱动电极或线圈,该电极或线圈引起RF交变场的生成。
当RF场与牙齿和牙龈的表面相互作用时,它通过改变口腔中表面的表面特性来提供清洁功能。特别地,以这种方式产生的RF场可以去除牙斑以及牙结石。也可以减少牙齿的着色。
US 10201701 B2描述了一种现有技术的电动牙刷。该牙刷包括台板、RF发生器、两个RF电极和位于两个RF电极之间的硅树脂条形式的电介质阻挡件。牙刷还包括刷毛。电介质阻挡件的高度延伸到接近刷毛远端的水平。阻挡件迫使在电极之间产生的RF场延伸到阻挡件的顶部,从而到达刷毛在使用中与牙齿和牙龈的表面接合的区域。以这种方式,该阻挡件被认为使RF场成形以使其更靠近牙齿或牙龈表面。
刷毛的远端以通常的机械方式摩擦牙齿表面以清洁牙齿,同时,RF电极发射RF场,该RF场在刷毛远端的水平处在正被刷的同一表面上提供增强的清洁或组织处理功能。
通常寻求RF口腔清洁装置领域的发展。
发明内容
本发明由独立权利要求限定。从属权利要求限定了有利的实施例。
发明人已经认识到,现有的基于RF的口腔清洁装置的缺点之一是由该装置产生的RF场是均匀的,并且在口腔中的每个位置处施加基本上均匀的RF场形状和强度。然而,对于许多口腔清洁或处理应用,能够改变场形状以便例如高强度局部聚焦RF场(例如具有高局部场强梯度)可用于处理局部结石区域将是有用的。这类油田能更好地溶解矿物,提高清洁效果。例如,局部高的场梯度可以引起局部变化的表面特性,这可以促进表面杂质的去除。然而,聚焦场对于一般的牙齿清洁目的效率较低,因为它们在任一时刻只能处理小的高度局部化的区域,即,场形状具有较小的电磁场覆盖区。
根据依据本发明的一个方面的示例,提供了一种口腔清洁和/或处理装置,所述装置包括:
清洁单元,包括:支撑主体,两个或更多个突出构件,每个突出构件从所述支撑主体的支撑表面向外延伸,并且每个突出构件包括一个或多个电极,所述突出构件彼此间隔开;以及
射频(RF)发生器,所述射频发生器被布置成根据驱动方案向所述两个或更多个突出构件的所述电极或在所述电极之间供应一个或多个驱动信号,以便在所述突出构件周围和/或所述突出构件之间的区域中感应出RF交变场,从而提供口腔清洁功能;
其中所述口腔清洁和/或处理装置适于能够被选择性地配置成至少两种不同的模式,每种模式被布置成用于产生具有不同空间强度分布的RF场,其中在所述模式之间的切换包括控制所述突出构件的位置或运动模式的改变,或者包括控制所述驱动信号或所述驱动方案的一个或多个特性的改变。
本发明的实施例基于提供具有可调RF场(例如具有可调强度分布)的基于RF能量的口腔清洁或处理装置。根据预期的应用,可以改变装置的模式,从而改变由装置产生的RF场形状或模式,并改变由装置传递的RF能量的空间分布。这改变了装置的清洁特性,允许装置在例如局部较高强度能量输送和更分散的较低强度能量输送之间适配。因此,这在装置的清洁功能方面提供了更大的灵活性。
来自RF发生器的驱动信号可以是交变(AC)驱动信号。
在至少第一模式中,RF场可以具有第一空间强度分布。在至少第二模式中,RF场可以具有第二空间强度分布。
模式是预定的或预定义的或预编程的模式,每个模式对应于预定义的场空间强度分布。所述模式例如是离散模式。
所述装置可以包括适于选择性地控制所述装置的模式的控制器。
在一些实施例中,所述装置可以包括致动器,所述致动器可操作以控制突出构件的位置或运动模式。所述致动器可以与所述控制器操作性地耦合,
在一些实施例中,控制器可以适于基于控制致动器来配置所述模式。附加地或备选地,控制器可以适于基于控制RF发生器来配置所述模式(以实现驱动信号或驱动方案的特性的改变)。
更具体地,在一些实施例中,所述装置可以还包括控制器,所述控制器适于使能在所述模式之间的选择性切换,其中所述控制器适于基于以下项在所述模式之间进行切换:控制所述致动器以控制所述突出构件的位置或运动模式的改变;和/或控制所述RF发生器以实现所述驱动信号或所述驱动方案的特性的改变。
控制器可以基于(例如响应于)来自诸如控制按钮的用户接口的控制信号来选择性地控制模式之间的切换。因此,切换可以由用户致动的控制信号触发。在其它示例中,切换可例如基于内部控制信号或功能信号(例如来自定时或调度模块的信号)或来自传感器的输出而自动触发。
举例来说,根据一个或多个实施例,可提供高强度局部清洁模式,其中所产生的RF场包括定位在每个突出构件的区域周围的相对小的高强度区域。此外,还可以提供更广域的通用清洁模式,其产生具有较低强度的RF场,其中能量散布在较宽的空间区域上。
每个模式可以被布置用于在限定的时间窗口上产生具有不同时间平均空间强度分布的RF场。
因此,至少第一模式可以被配置为生成第一时间平均空间强度分布,并且至少第二模式可以被配置为生成第二时间平均空间强度分布。
一个或多个模式中的空间强度分布可以是时间相关的(作为时间的函数而变化)。因此,在所述情况下,上述空间强度分布可以是时间平均空间强度分布。空间强度分布可以周期性地变化,并且时间窗口可以是所述周期性变化的一个周期或循环的持续时间。
在装置的第一模式中,空间强度分布在包含突出构件的区域上比在第二模式中在空间上更均匀。
这里,RF能量场在第一模式中比在第二模式中更空间地分布。例如,时间平均空间强度分布可以比第二模式中的分布空间上更均匀。
在第一模式中空间上更均匀的场可以意味着在限定区域或体积上的场的平均梯度或场的最大梯度比第一模式中的低。例如,跨越支撑主体的支撑表面的区域上的平均或最大场梯度可以较低。在一些示例中,在具有由突出构件的位置限定或界定的边界的区域上,在它们的静止位置或它们振荡时的最大偏转位置,平均或最大场梯度可以较低。
所述装置可以被配置为用于产生包括一个或多个强度峰值或场梯度的RF场空间强度分布,并且其中在第一模式中,所述峰值或场梯度被配置为作为时间的函数相对于所述支撑表面在空间上运动,并且在第二模式中,所述峰值或场梯度被配置为展现相对于所述支撑表面减小的运动或无运动。
不同模式的所产生的RF场强度分布的变化可以在不同方式的范围内实现。这些可以被分类成两个宽广的组:用于改变模式(例如,引起突出元件的位置或运动模式的改变)的机械装置,以及电或信号装置(改变驱动信号的特性或RF发生器的驱动方案)。
改变驱动方案可以包括改变提供给各个电极的驱动信号,并且还改变提供给整个清洁单元所包括的电极组(total set)的驱动信号的模式,例如改变在任何给定时间激活的电极的模式,或者改变跨支撑主体的不同点处的不同电极的驱动信号幅度。
首先将概述电装置。
根据一个或多个实施例,RF发生器可操作以独立地控制提供给突出构件的不同子集的驱动信号,并且其中所述模式之间的改变至少部分地基于选择性地激活或禁用突出构件的一个或多个子集的电极。因此,在不同模式中,突出构件的不同子集的电极被控制为激活或非激活(基于向所述电极提供或不提供驱动信号)。
在该组实施例中,RF场分布可以基于选择性地接通或断开对清洁单元的突出构件的不同子集的驱动信号的供应而改变。通过适当地控制在给定时间激活的突出元件电极的空间模式,所得到的RF场的形状(强度分布)可以被控制。
控制器可以被包括、与RF发生器可操作地耦合,并且适于例如基于一组一个或多个预存储的激活驱动方案(激活模式)来控制或协调选择性激活和禁用,每个激活驱动方案被配置用于生成具有预定形状或强度分布的RF场。
如上所述,用于实现模式改变的宽广的第二组装置是机械装置。
例如,在一组实施例中,模式之间的改变包括控制或致动突出构件的运动模式的改变。广泛地说,如果驱动突出构件以周期性方式运动(例如振荡),则(时间平均)RF场强度分布在清洁单元的区域上变得更空间地分布(具有更小的平均场或场梯度)。如果它们是静止的,或者它们的运动幅度较小,则RF场强度分布更局部地集中,例如包括围绕每个突出构件的区域的相对高强度的局部区域,但是在该区域之外的低强度。在第一种情况下,更分散的场对于一般的清洁功能是有用的,其中需要在更宽的区域上进行清洁。在第二种情况下,更局部聚焦的场对于非常局部区域的更高强度的清洁是有用的。
所述装置可以包括用于例如根据可调节的运动模式来控制突出构件的位置或运动的致动器。致动器可以是电动致动器或手动驱动致动器。
控制器可被设置为可操作地耦合到致动器,并且适于基于控制致动器以改变被施加到突出构件的运动模式来控制模式之间的调节。
根据一个或多个实施例,每个突出构件可适于是柔性的,以允许突出构件的至少远端部分相对于构件的近端弯曲或摆动。
所述装置可以还包括致动器,例如以振荡机构的形式,所述致动器被布置成引起所述突出构件的至少远端部分的振荡。
在至少两个模式之间的切换可以包括调节突出构件的振荡频率。这里,模式之间的改变是基于改变被施加到突出构件的驱动振荡的特性。
例如,在至少一种模式中,可以在支撑表面处施加致动以引起每个突出构件的近端的周期性或振荡位移。由于突出构件的柔性,这引起突出构件的周期性或振荡运动,这导致RF场在该模式中在较宽区域上扩展。突出构件可以具有横向柔性,从而例如引起构件的横向振荡运动。在另一模式中,振荡可以被禁用或设置为较低水平,从而导致更局部集中的场强分布,例如适于局部高强度处理动作。
所述装置可以配置为第一模式和至少第二模式,在第一模式中,突出构件具有零振荡,在第二模式中,突出构件具有非零振荡。在零振荡模式中,突出构件可以相对于支撑表面基本上静止。这对于产生局部高强度场是有用的。
在振荡机构被布置成使清洁单元的支撑表面振荡的情况下,改变突出构件的振荡可基于改变支撑表面的这种振荡的频率、振幅或运动模式。
支撑表面的振荡通常可以在任何方向上,例如横向(例如横向于突出构件的高度尺寸)或竖直(例如平行于突出构件的高度轴线)。例如,横向运动可以包括支撑表面的线性横向运动(侧向)或旋转横向运动。竖直运动可以包括通过致动机构施加到支撑主体上的轻敲运动(tapping motion)。
根据一个或多个实施例,清洁单元还可以包括从支撑表面向外延伸的多个清洁元件或构件,例如用于清洁牙齿的刷毛或清洁丝。由机械振荡机构引起的清洁单元的振荡可被布置成引起刷毛的振荡。换句话说,驱动刷毛振动的振荡也驱动突出构件的运动或振荡。
刷毛和突出构件优选地被耦合到相同的表面,并且因此相同的振荡动作能够驱动两者的振荡。
根据一组有利的实施例,每个突出构件的至少一部分相对于近端表现出固有频率(例如,横向)振荡,并且其中,在第一模式中,支撑表面的所述振荡频率被设定为与所述固有频率谐振的频率,并且在第二模式中,支撑表面的所述振荡频率被设定为与固有频率不谐振的频率。
关于与固有频率谐振的频率意味着例如具有所述固有频率的频率谐波,换言之,被配置为引起突出构件的谐振振荡的频率。在第二模式中,选择频率使得其不引起突出构件的谐振振荡。
因此,在第一模式中,引起突出构件的谐振振荡,这导致靠近电极的场的高强度区域在更宽的区域上被扫掠。在第二模式中,振荡幅度被减小,从而将高强度场处理限制在更小的区域或体积,所述区域由此接收更大的时间平均RF能量输送。
在有利的示例中,在第二模式中,支撑表面的振荡频率被设定为与突出构件的固有频率反谐振的频率。反谐振意味着例如反谐波。这意味着例如它被设置在固有频率的两个连续谐波之间的频率。
这意味着在第二模式中,振荡与突出构件的固有频率反谐振,这意味着突出构件理想地保持静止(基本上为零振幅和零振荡频率)。
根据一个或多个实施例,每个突出构件可以具有连接到支撑表面的近端,并且其中支撑主体的与每个突出构件的近端相遇或围绕的区域具有第一组机械谐振频率(例如,谐振频率的范围或一个或多个频率的离散组),并且表面的其余部分表现出第二组谐振频率。
在第一模式中,支撑表面可以被驱动以具有第一频率组和第二频率组或范围两者的频率谐振或谐波的频率振荡。在第二模式中,支撑表面可以被驱动以与第一频率组或范围的任何频率不谐振、且与第二频率组或范围的频率谐振或谐波的频率振荡。
因此,该实施例遵循与上述谐振突出构件实施例类似的概念,除了这里是突出构件被耦合到支撑结构的某些部分,所述部分被配置为在某一个或多个频率处进行谐振。
优选地,在第二模式中,支撑表面可被驱动以与通向或围绕每个突出构件的支撑主体区域的谐振频率的设置或范围反谐振或反谐波的频率振荡。
根据一个或多个实施例,所述装置可以包括辅助致动或强制(forcing)机构,所述辅助致动或强制机构被布置成将第二机械振荡施加到所述突出构件的至少一个子集上,其中所述第二机械振荡处于与由主振荡机构(以上讨论的)施加到所述支撑表面上的振荡的频率相同的频率,但是与所述第一振荡异相(优选地反相)。因此,辅助致动机构有效地对突出构件施加反作用力以抵消主装置振荡机构(例如,其用于振荡刷毛)的力,从而减少或消除突出构件的至少一个子集的运动。
根据一个或多个实施例,所述装置可以还包括磁力装置或电磁力装置,所述磁力装置或电磁力装置可操作以在每个突出构件上施加磁力或电磁力,并且其中所述模式之间的切换是基于:部分地基于所述磁力装置或电磁力装置的使用来调节所述突出构件的运动模式。
为了例如改变不同模式之间的空间强度分布,这可以单独使用或与上面概述的其他特征结合使用,以控制突出构件在不同模式中的位置或运动(例如,振幅和/或振荡频率)。
例如,根据一个或多个实施例,支撑表面可以以第一频率振荡。这可以部分地用于例如清洁单元的振荡刷毛。支撑表面的振荡通常可以在任何方向上,例如横向(例如横向于突出构件的高度尺寸)或竖直(例如平行于突出构件的高度轴线)。例如,横向运动可以包括支撑表面的线性横向运动(侧向)、旋转横向运动或偏心弧形运动。竖直运动可以包括例如施加到支撑主体上的轻敲运动(tapping motion)。
在所述装置的一种模式中,可以控制磁力装置或电磁力装置以与支撑表面的振荡同步地在突出构件上施加反作用力模式,从而抵消或完全消除由于支撑表面的运动而引起的突出构件的运动。
该示例中的磁力装置与支撑表面振荡同步地(或反同步地)施加力,以便抵消否则将由于支撑表面振荡而发生的每个突出构件的运动。
在至少第二模式中,磁力装置或电磁力装置可以被禁用。在第二模式中,由于支撑表面在它们的近端处的振荡,突出构件自由地振荡(例如,横向地、径向地或竖直地,或其任何组合),并且因此场强度分布在空间上更加分布或均匀。
可选地,除了改变场的空间强度分布之外,所产生的场的其它电特性也可以在模式之间变化,例如,场的频率组成,和/或场的功率或强度水平。
举例来说,根据一个或多个实施例,RF产生器可适于将脉冲RF驱动信号供应到电极,并且其中在所述至少两个模式之间切换包括控制脉冲RF驱动信号的占空比的改变。这可以例如结合上述RF场形状的机械或电修改来完成。
通过控制占空比,可以调节清洁或处理的总体强度。
根据一个或多个实施例,在至少两个模式之间切换可以包括调节提供给电极的驱动信号的频率组成。
在至少一组实施例中,例如,在至少一种模式中,RF发生器可以被配置为生成包括周期性重复的周期或频率序列的驱动信号。例如,这可以是频率的单向扫描或循环扫描。可选地,在另一(第一)模式中,驱动信号可以是单频驱动信号(仅一个频率)。
根据一个或多个实施例,所述装置可以包括控制器,该控制器适于确定清洁单元的位置和/或取向,并且其中在模式之间的切换基于所确定的位置或取向信息被触发。控制器可以确定装置相对于口腔中特定的一个或多个位置的位置,或者例如相对于目标处理区域的位置。
附加地或备选地,控制器可适于基于与突出构件的运动或位置相关的信息来触发模式之间的切换。控制器可以基于来自机械振荡机构(布置成使支撑主体振荡)的信号来触发模式之间的切换,所述信号指示支撑表面的运动方向和/或突出构件的运动方向。
所述确定可以基于使用耦合到控制器的传感器,例如位置或取向传感器。传感器可以包括例如加速计和/或接近度传感器。它可以包括光学或其它电磁传感器。它可以包括成像传感器。
口腔清洁和/或处理装置可以采用多种不同的形式。作为非限制性示例,其可为以下项中的任一项:牙刷装置、组合的刷牙和牙线清洁装置、口腔冲洗器、或具有刷牙功能的喉舌单元。
清洁单元例如可以是用于口腔清洁装置的头部,例如作为非限制性示例的牙刷、组合的刷牙和牙线清洁装置、口腔冲洗器或具有刷牙功能的喉舌单元。例如,清洁装置可以是牙刷装置,并且其中清洁单元是牙刷头部。
所述装置可以包括控制单元,所述控制单元包括RF发生器。它还可以包括如上所述的机械致动器(例如机械振荡器)。它还可以包括可操作地耦合到RF发生器的控制器,并且可选地还包括诸如机械振荡器的机械致动器。控制单元可以电连接和机械连接到或可释放地连接到清洁单元。控制单元可以形成装置的主体或手柄部分。
根据另一方面,控制单元可独立于清洁单元设置,并且适于在使用中与清洁单元连接,并可操作以在这样连接时控制所述装置的操作模式。
根据本发明另一方面的实施例提供了一种配置口腔清洁或处理装置的清洁或处理模式的方法。
所述口腔清洁或处理装置,包括:
清洁单元,包括:两个或更多个突出构件,每个突出构件从所述支撑主体的支撑表面向外延伸,并且每个突出构件包括一个或多个电极,所述突出构件彼此间隔开;以及
射频(RF)发生器,所述射频发生器被布置成根据驱动方案向所述两个或更多个突出构件的电极或在所述两个或在电极之间提供一个或多个驱动信号,以便在所述突出构件周围和/或在所述突出构件之间的区域中感应RF交变场,从而提供口腔清洁功能。
所述方法包括:
在至少两个模式之间选择性地调节所述装置,在第一模式中所述装置被布置成用于产生具有第一空间分布的RF场,并且在第二模式中所述装置被布置成用于产生具有不同的第二空间强度分布的RF场,并且
其中在所述模式之间的切换包括控制所述突出构件的位置或运动模式的改变,和/或包括控制所述驱动信号或所述驱动方案的特性的改变。
场的空间强度分布意味着场强度的分布或形状或模式,其可以包括一个或多个场梯度。
本发明的另一方面提供了一种计算机程序产品,包括计算机程序代码,所述计算机程序代码能够在处理器上被执行,其中所述代码被配置为使所述处理器执行根据以上概述或以下描述的任何示例或实施例或者根据本申请的任何权利要求的方法。
参考下面描述的实施例,本发明的这些和其它方面将变得显而易见。
附图说明
为了更好地理解本发明,并且为了更清楚地示出如何实现本发明,现在将仅通过示例的方式参考附图,其中:
图1示出了示例性口腔清洁和/或处理装置的清洁单元的正视图;
图2示出了示例口腔清洁和/或处理装置;
图3示出了具有片状突出构件的示例清洁单元的平面图;
图4示出了另一示例清洁单元的平面图;
图5示出了清洁单元的另一示例,其包括刷毛;
图6示出了多个不同模式下的示例清洁单元,其中电极的不同子集被控制为活动的或不活动的;
图7示出了具有柔性突出构件的示例清洁单元;
图8示出了包括机械致动单元的示例口腔清洁和/或处理装置;
图9示出了具有柔性突出构件阵列的另一示例清洁单元;
图10示意性地示出了包括清洁单元的示例实施例,该清洁单元包括具有不同谐振频率的材料部分;
图11-图14示出了包括磁力装置的另一示例清洁和/或处理装置;
图15示出了牙刷装置形式的示例性清洁和/或处理装置;以及
图16概述了根据一个或多个实施例的示例设备的示例工作流的步骤。
具体实施方式
将参照附图描述本发明。
应当理解,详细描述和特定示例虽然指示了装置、系统和方法的示例性实施例,但是仅用于说明的目的,而不旨在限制本发明的范围。本发明的装置、系统和方法的这些和其它特征、方面和优点将从以下描述、所附权利要求和附图中变得更好理解。应当理解,附图仅仅是示意性的并且没有按比例绘制。还应当理解,在所有附图中使用相同的附图标记来表示相同或相似的部件。
本发明提供一种口腔清洁和/或处理装置,其包括用于产生RF场以提供口腔清洁功能的电极。该装置包括用于容纳在口腔中的清洁单元,该清洁单元包括至少第一突出构件和第二突出构件,该第一突出构件和第二突出构件沿相同的大体方向远离基部或支撑结构突出。每个突出构件包括用于产生RF交变电磁场的一个或多个电极或天线。该装置通过用RF信号发生器驱动电极而在电极之间和电极周围的空间中产生RF场。该装置包括用于在不同设置之间改变所产生的RF场(例如,空间场强或梯度分布)的机械或电气装置。特别地,该装置可配置在至少两个模式或设置中,每个模式或设置与不同的相应场模式或空间强度分布相关联。如下所述,这对于使清洁或处理功能适应不同的所需目的是有价值的。
在一组有利的实施例中,可选模式包括至少一个模式,在该模式中RF空间强度分布包括由较低强度区域围绕的一个或多个聚焦的、局部的、较高强度区域,以及第二模式,其中至少在一定时间窗口上测量的RF空间强度分布(例如时间平均强度分布)是更均匀的,并且由场携带的RF能量更广泛地散布在电极周围和电极之间的区域上。
例如,众所周知,口腔中的某些特定位置更容易形成牙斑和牙结石(例如,紧邻唾液腺的牙齿或舌前牙),并且因此更容易形成龋齿。某些特定的位置更容易发生牙龈炎症,例如冠周炎,例如最后磨牙后面的位置,用常规的机械清洁装置难以到达所述位置。
其它口腔病理包括慢性口腔干燥,其可由唾液管分泌减少引起。能够感受到源自口中三叉神经远端的口腔疼痛。因此,这两种情况都与局限于口腔特定区域的问题有关。
尽管所述病症目前是已知的,但是它们难以预防,并且一旦检测到,需要主动口腔处理。特别地,一旦牙医识别出口腔病理的根本原因,就需要对口腔中的特定点进行局部处理以治愈病理状态。
本发明的实施例提出改变RF处理的模式以准许针对多种局部处理需要的应用。
因此,本发明的实施例允许针对特定的临床病理优化RF处理,同时避免用RF能量过度暴露口腔的其它区域。
如将在下面更详细地讨论的,实施例能够在至少一种模式中实现对口腔中已知为相关病理的特定目标区域的靶向高强度处理。所述位置可以包括例如:
-继发性龋齿,其中生物膜在牙齿填充物和牙齿的界面处生长;
-冠周炎:最后磨牙后的齿龈的炎症(最大和下颌);
-舌下颌切牙,其典型地收集大部分结石;
-在口腔中的三叉神经末梢;
-唾液管。
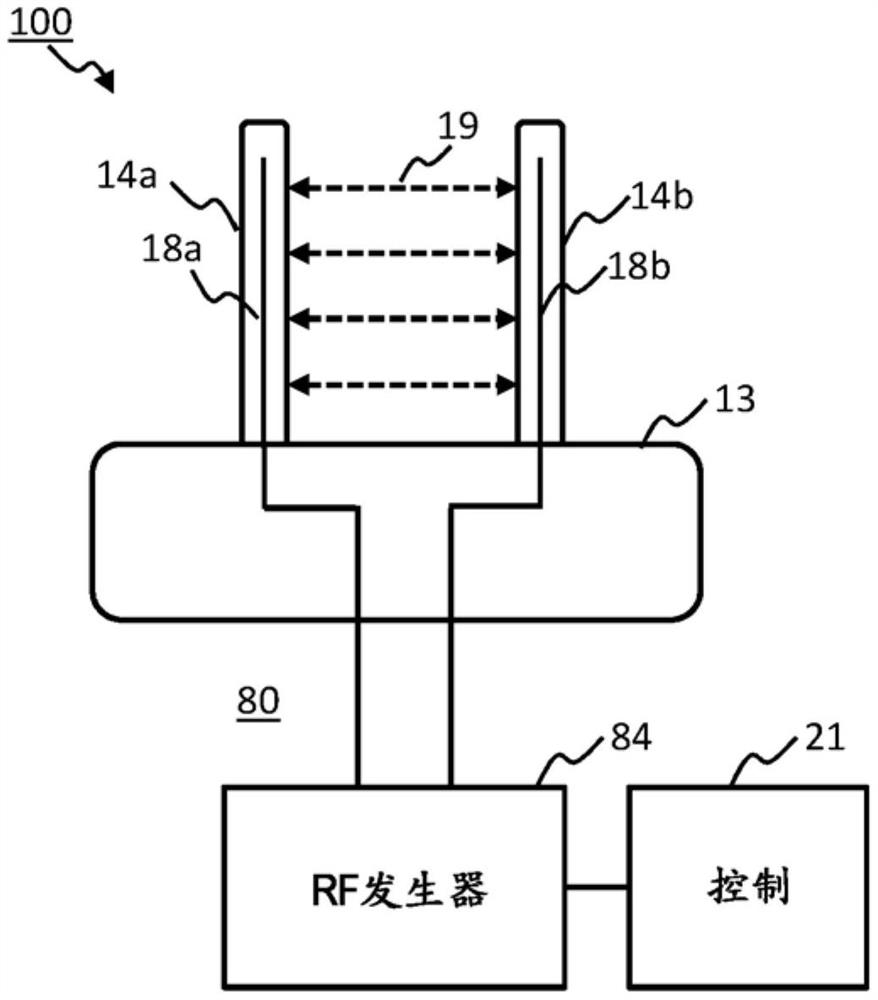
图1和图2示意性地示出了根据一个或多个实施例的口腔清洁和/或处理装置的示例。装置100至少包括清洁单元10和RF发生器84。图1示出了清洁单元10。图2示出了包括清洁单元和RF发生器的清洁和/或处理装置100。
清洁单元10包括:支撑主体12,例如台板(platen)。支撑主体具有提供支撑表面13的上表面,突出构件14,14b从该支撑表面13延伸。特别地,清洁单元包括第一突出构件14a,第一突出构件14a从支撑主体的支撑表面13向外延伸,并且包括一个或多个第一电极18a。清洁单元还包括第二突出构件14b,第二突出构件14b从支撑主体的支撑表面向外延伸并且包括一个或多个第二电极18b。第二突出构件与第一突出构件间隔开间距D。每个突出构件14具有近端20和远端22,突出构件14通过近端20连接到支撑表面13。
清洁装置还包括RF发生器84,RF发生器84被布置成在第一电极18a和第二电极18b之间供应交变RF驱动信号,以在第一突出构件14a和第二突出构件14b周围和之间的区域中感应交变RF电磁场19。当头部被容纳在口腔中时,这提供了口腔清洁功能。RF发生器在两个电极之间施加交变电势。用于交变电磁场的RF频率的合适范围可以是例如从3kHz到300GHz的任何频率。
该装置还可以包括控制器21,控制器21可操作地耦合到RF发生器84,并且可操作以控制由RF发生器实现的驱动方案和/或由RF发生器生成的驱动信号的特性。
虽然图1和图2仅示出了一对突出构件14a、14b和电极18a、18b,但是在另外的示例中,可以提供多于两个的突出构件。可以提供彼此间隔开的多个成对的突出构件,每个构件包括电极,并且其中RF发生器可操作以跨越每对突出构件的电极供应相应的交变驱动信号。
口腔清洁和/或处理装置100适于以至少两种不同的模式选择性地配置。在每种模式中,该装置在突出构件14a、14b周围和之间的区域内产生具有不同空间强度分布的RF场。
该装置适于允许在模式之间切换。实现在模式之间的切换可以包括:
-控制所述突出构件的位置或运动模式的改变,和/或
-控制供应给电极的驱动信号的特性的改变,或改变驱动该组电极的驱动方案。
在这种情况下,突出构件的电极18a、18b被集成在每个相应突出构件的主体内。例如,在这种情况下,每个突出构件可以包括其中集成有电极的层状(片状)突出构件。在其它示例中,电极可在突出构件的表面处暴露,或突出构件本身可由导电材料形成以充当电极。
该电极可以包括导电元件,该导电元件可以采用各种形状或形式,例如平面形式,或线性线的形式,或线环的形式。
可以以各种不同的方式实现模式之间的切换,从而改变空间RF场强度分布,但是通常可以将其分类为两个广泛的组:用于在模式之间转变的机械装置(例如,控制突出元件的位置或运动模式的改变),以及电或信号装置(控制RF发生器的驱动方案的特性的改变)。下面将更详细地讨论各种选项。
如上所述,该装置可以包括控制器21,控制器21用于控制模式之间的切换,例如用于控制由RF发生器产生的驱动信号的信号特性,或者在一些实施例中,通过由诸如机械振荡器或其它致动器的致动器控制突出构件的致动。
在使用中,可以以不同的方式进行模式之间的切换。它可以基于用户输入通过用户控制元件(例如按钮)被手动触发。在备选示例中,其可以自动地执行,例如基于检测清洁单元与预定的感兴趣区域相邻或相对于要处理的感兴趣区域保持在预定取向的位置、地点或取向感测功能。
例如,根据一个或多个实施例,该装置可以包括位置检测装置,该位置检测装置适于检测该清洁单元的至少一部分相对于口腔内的感兴趣区域的位置和/或检测该装置或清洁单元的取向。这可用于检测清洁单元何时邻近口中的预定故障点,其中较高强度的清洁将是有利的。响应于检测到清洁单元位于这样的位置,可以自动激活更高强度的清洁模式。当清洁单元从故障点移开时,可以自动激活低强度模式。
控制器21可以执行装置的至少清洁单元的位置和/或取向的确定。在一些示例中,它可以可操作地与位置或取向传感器耦合,例如加速度计和/或用于感测表面的接近度的光学传感器。
附加地或备选地,控制器可适于基于关于突出构件的运动或位置的信息来触发模式之间的切换。控制器21可基于来自机械振荡机构(布置成使支撑主体振荡)的信号来触发模式之间的切换,该信号指示支撑表面的运动方向和/或突出构件的运动方向。
清洁单元10是用于基于RF能量的口腔清洁或处理装置的单元。在图1和图2的示例中,该对第一电极18a和第二电极18b适于具有施加在该对上的交变电势,用于刺激在电极之间产生交变RF电磁场。
然而,更一般地,电极可以是适于接收驱动信号并产生RF能量的任何形式的导电元件。例如,可以以回路的形式提供一个或多个电极,用于感应地产生交变场。可以跨越电极对施加驱动信号,如在图1的示例中,或者驱动信号以例如驱动电流的形式被供应给诸如线圈电极的单独元件。
清洁单元10用于被接纳在用户的口腔内以执行口腔清洁和/或处理功能。清洁单元10例如可以是用于诸如牙刷或其它装置的口腔清洁装置的头部,或者可以是不同形式的清洁单元,例如用于配合到口腔中的喉舌单元(mouthpiece unit)的刷弓。
可选地,清洁单元10还可以包括位于第一突出构件14a和第二突出构件14b之间的介电阻挡构件。然而,这不是必需的,因为在本发明的实施例中,可以主动地调节场强分布,使得用于引导场模式的物理元件(如上所述)不是必需的。
装置100的每个模式可以被布置用于在限定的时间窗口上产生具有不同时间平均空间强度分布的RF场。
因此,第一模式可以被配置为生成第一时间平均空间强度分布,并且至少第二模式可以被配置为生成第二时间平均空间强度分布。一个或多个模式中的空间强度分布可以是时间相关的(作为时间的函数而变化)。因此,在所述情况下,上述空间强度分布可以是时间平均空间强度分布。空间强度分布可以周期性地变化,并且时间窗口可以是该周期性变化的一个周期或循环的持续时间。
在装置100的第一模式中,空间强度分布在包含突出构件14a、14b的区域上比在第二模式中在空间上更均匀。这里,RF能量场在第一模式中比在第二模式中更空间地分布。所涉及的区域可以是支撑表面13的整个区域,或更小的区域,例如在两个突出构件14a、14b之间延伸并由这些构件界定的区域。
空间均匀性可以通过例如在所述区域内的场强或场强强度的最高值与场强强度的最低场强的比率来测量。其可通过(最大)场梯度或与场强相关的另一统计值(例如场强的四分位范围)来测量。
例如,时间平均空间强度分布在第一模式中比在第二模式中在空间上更均匀。这意味着在限定的时间窗口上,空间RF能量场比在第二模式中更均匀地扩展。换句话说,作为时间函数或在时间窗口上的空间强度分布比在第二模式下在空间上更均匀。
在第一模式中的时间平均RF场内的峰值强度值可以比在第二模式中峰值强度值低。
例如,高强度局部清洁模式可以由第二模式提供,其中所产生的RF场包括围绕每个突出构件的区域定位的相对小的高强度区域。此外,由第一模式提供更广域的一般清洁模式,其产生具有较低强度的RF场,其中能量散布在较宽的空间区域上。
因此,根据期望的应用,本发明的某些实施例可以允许在较高聚焦的RF能量场(具有较大的场梯度)和较低聚焦的、较分散的场(具有较小的场梯度)之间切换。
关于第一模式,更分散的场可用于一般的清洁或处理功能,其中需要在更宽的区域上进行清洁或处理。在第二情况下,更局部聚焦的场对于非常局部区域的更高强度的清洁是有用的,例如填充物和剩余牙齿之间的空间,在该空间中细菌和结石可以积聚。这仅代表不同模式的一个选项,并且还可以实现各种其它模式,并且将在下面进一步讨论。
装置100可以被配置为用于生成包括一个或多个强度峰值或场梯度的RF场空间强度分布,并且其中在第一模式中,峰值或场梯度被控制成作为时间的函数相对于支撑表面在空间上运动,并且在第二模式中,峰值或场梯度被控制成相对于支撑表面展现减少的运动或没有运动。
例如,场强或强度的峰值可以对应于电极18a、18b周围的局部强度峰值浓度。
这里,空间强度分布是时间相关的,并且作为时间的函数而变化。通过在突出构件14a、14b之间和周围的区域上周期性地运动包含局部空间峰值的场模式,可以产生更多的空间分布,更低的平均强度场(具有更小的平均场梯度)。这意味着在给定的时间窗口上,时间平均空间强度分布在空间上更加均匀,并且RF能量更空间地分布。相反,在例如需要局部高强度处理的情况下,在第二模式中,可以控制局部空间峰值以保持静止。
场强分布可以在时间窗口上经历周期性变化。
在这种情况下,模式之间的切换可以例如基于例如以周期性或振荡方式实现突出构件14a、14b的物理运动模式,或者可以例如基于改变在给定时间激活和非激活的突出构件阵列的空间模式。下面更详细地讨论两个示例。
在上述示例中,至少两种模式之间的切换改变场的空间均匀性,即RF能量在场的面积或体积上的扩展。然而,附加地或备选地,装置100可以包括其强度分布在场的平均或总强度水平方面不同的模式,例如通过增加整个场上的输出功率。因此,该装置可以从较高强度处理模式(较高功率输出)切换到较低强度模式(较低功率输出)。
可以在不同特定方式的范围内实现不同模式的所产生RF场强度分布的变化。下面将更详细地讨论各种选项。首先简要讨论清洁单元10的结构的不同选择。
根据一些实施例,每个突出构件14a、14b可以包括片状(扁平片状)构件。该示例在图3中示出,图3示出了示例清洁单元10的俯视图。在该示例中,每个片状突出构件限定了一个平面,并且所述片状构件被布置成它们相应的平面平行,并且所述构件的主平坦表面彼此面对。在图3的示例中,突出构件是平坦的并且线性地延伸,但是在其他示例中,它们可以具有例如弯曲的薄片形状。例如,在一些实施例中,突出构件可以同心环或弧的形式提供。
突出构件14a、14b的构造或布置有不同的选择。清洁单元10可以包括单个第一突出构件和第二突出构件,其可用作成对电极(阳极和阴极对)。例如,可以在该对电极之间施加交替驱动信号。
在另外的示例中,可以提供多个第一突出构件和多个第二突出构件,每个第一突出构件包括至少一个相应的电极,并且每个第二突出构件包括至少一个相应的电极。因此,可以提供多个成对电极。
图4中示出了一个示例,其示出了示例清洁单元的俯视图。这里,清洁单元10包括布置在第一空间组15a中的多个第一突出构件14a和布置在第二空间组中的多个第二突出构件14b,第一空间组与第二空间组间隔开并面对第二空间组布置。在该示例中,每个空间组采取线性空间组的形式,特别是线。然而,这不是必需的,并且其它配置也是可能的,例如每个空间组包括具有不同形状的簇(cluster)。
根据预期的应用,口腔清洁单元10的形式有不同的选择。
在一组实施例中,清洁单元包括多个机械清洁元件,例如用于清洁牙齿的刷毛。图5中示出了一个示例。
清洁单元10包括多个刷毛42,多个刷毛42例如被布置成束或簇,从清洁单元的支撑表面13向外延伸。清洁单元可以包括提供支撑主体的台板12,并且其中台板的面形成支撑表面。
这组实施例可以适用于例如清洁单元10是牙刷装置的头部的情况,例如适于耦合到牙刷装置的主体部分,例如可拆卸耦合。然而,其它类型的口腔清洁装置也可以包括刷毛42,例如装配到口腔中的刷嘴单元的刷弓,或者具有与RF能量发射元件结合的流体发射喷嘴的组合的刷和牙线装置。
在图5的示例中,突出构件14a、14b中的每一者在两个横向侧上由刷毛42围绕。在一些示例中,刷毛可以基本上覆盖支撑表面的整个区域,可能不包括表面的外围区域。然而,这不是必需的。刚毛可以仅设置在突出构件的一个横向侧上,例如在部件之间的空间中没有刚毛。
优选地,突出构件14a、14b可延伸到比刷毛42的远端高度短的远端高度。
如上所述,不同模式的所产生的RF场强度分布的变化可以在不同方式的范围内实现。这些可以分类成两个宽广的组:用于改变模式(例如,引起突出元件14a、14b的位置或运动模式的改变)的机械装置,以及电或信号装置(改变RF发生器84的驱动方案的特性)。
首先将概述电装置。
根据一个或多个实施例,RF发生器可操作以独立地控制供应给突出构件的不同子集的驱动信号,并且其中模式之间的改变至少部分地基于选择性地激活或禁用到突出构件的一个或多个子集的电极的驱动信号。
在该组实施例中,RF场分布可以基于选择性地接通或断开对清洁单元的突出构件的不同子集的驱动信号的供应而改变。通过适当地控制在给定时间激活的突出元件电极的空间模式,可以控制所得到的RF场的形状(强度分布)。
如所讨论的,可以包括与RF发生器可操作地耦合的控制器。这可以适于控制或协调选择性激活和禁用,例如基于一组一个或多个预先存储的激活驱动方案(激活模式),每个激活驱动方案被配置用于产生具有预定形状或强度分布的RF场。
图6示意性地示出了该实施例。图6a示出了装置处于第一模式的清洁单元10。图6b示出了装置处于第二模式的清洁单元。图6c示出了装置处于第三模式的清洁单元。
在每个模式中,控制器适于将不同的激活驱动方案或寻址方案施加到多个突出构件,以用于控制突出构件14a、14b电极的不同选择为激活或非激活。激活构件显示为阴影,而非激活构件显示为非阴影。
在图6a的第一模式中,突出构件14a、14b的第一子集52a被提供有用于驱动它们各自的电极以产生RF场19的驱动信号。同时,突出构件的第二子集52b不被提供驱动信号,使得它们各自的电极是不激活的,并且在这些构件之间不产生场。这导致在第一模式中产生RF场,该RF场在由突出构件的第一子集52a覆盖的空间区域中具有峰值强度。在该示例中,每个子集包括多对第一突出构件14a和第二突出构件14b,所述多对第一突出构件14a和第二突出构件14b包括被激活驱动或不激活的电极。
在图6b的第二模式中,突出构件14的第一子集52a和突出构件的第三子集52c的电极是不激活的,而在第一和第二之间的第二子集52b由RF发生器提供驱动信号,并且是激活的。因此,产生在由电极的第二子集52b覆盖的中间区域中具有峰值强度的RF场19。在这个示例中,每个子集包括多对第一电极和第二电极,它们是激活驱动的,或者是非激活的。
在图6c的第三模式中,突出构件的第一52a和第三52c子集的电极被供应来自RF发生器的驱动信号,而第二52b和第四52d子集的电极不被供应来自RF发生器的驱动信号。因此,多个突出构件14包括激活构件和非激活构件的交替子集。因此,产生所得到的RF场19,其具有高和低场强的交替区域,在由突出构件的第二子集52b和第四子集52d覆盖的区域中具有峰值。在该示例中,每个子集包括多对第一电极和第二电极(由第一突出构件14a和第二突出构件14b构成),所述多对第一电极和第二电极被激活驱动或非激活。
图6中所示的不同激活驱动方案仅表示说明性示例,并且在其它示例中,不同模式可由任何期望模式的激活和非激活突出构件电极来表征。
根据一个或多个实施例,模式之间的改变可以包括调节提供给突出构件电极的不同子集的驱动信号的驱动方案或占空比。例如,可以向突出构件的不同子集的电极提供具有不同频率或不同幅度或不同脉冲占空比的驱动信号,从而配置所得到的场的场形状或模式或强度分布。
可选地,所产生的场的其它电特性也可以在模式之间变化,例如,场的频率组成,和/或整个场的功率或强度水平。
举例来说,根据一个或多个实施例,RF产生器84可适于供应脉冲RF驱动信号,并且其中在所述至少两个模式之间切换包括控制脉冲RF驱动信号的占空比(频率)的改变。这可以例如结合RF场形状的机械和/或电修改来完成。
通过控制占空比,可以在较低强度(例如用于正常清洁)和高强度(用于处理局部故障点)之间调节总体清洁强度。因此,高强度脉冲可以在目标区域或位置提供高强度清洁。
具有可适配占空比的RF脉冲方案可用于多种临床应用。例如,RF脉冲处理可用于刺激口腔中的神经,从而缓解神经疼痛。脉冲处理也可用于刺激唾液管,从而缓解慢性口腔干燥。
占空比的调节允许调节处理的强度。这可以避免口腔组织的过度刺激。在较高和较低占空比频率之间交替也可以防止装置100过热。
当在模式之间切换时,脉冲占空比的改变可以单独使用或与其它可能的实现选项(下面讨论)结合使用。
占空比的实现和调整可以由RF发生器84本身控制,或者可以包括控制器,该控制器与RF发生器可操作地耦合并且适于控制不同可选模式之间的占空比。
例如,根据有利的实施例,所产生的场的总输出功率可以在0.1W到15W的范围内,例如0.1W到10W。这些范围对于在用户的口中使用是安全的,并且足以提供上述的处理效果。
根据一个或多个实施例,在至少两个模式之间的切换可以包括调节提供给电极的驱动信号的频率组成。
在至少一组实施例中,例如,在至少一种模式下,RF发生器84可被配置为产生包括周期性重复的RF频率周期或序列的驱动信号。例如,这可以是频率扫描。
优选地,在至少另一种模式中,驱动信号可以是单频驱动信号(仅一个频率)。
附加地或备选地,在至少两个模式之间的切换可以包括:调节包括在时间周期或扫描中的频率。
频率的周期或序列可以包括频率的扫描(例如频率的连续扫描)。备选地,它可以包括串联步进通过的离散频率序列。
以这种方式使用频率扫描或序列对于许多临床应用是有用的。例如,它可用于刺激口腔中的神经,从而缓解神经疼痛。它还可用于刺激唾液管,从而缓解慢性口腔干燥。
如上所述,用于实现模式改变的第二组装置是机械装置。
特别地,在一组实施例中,模式之间的改变基于改变突出构件14a、14b的运动模式。
可以提供适于控制突出构件的位置或运动模式的致动器。这可以可操作地耦合到例如控制器,该控制器适于基于控制致动器来控制模式改变。
根据至少一组实施例,为了实现所述运动,所述多个突出构件中的每一者可适于为柔性的,以允许所述突出构件的至少远端部分相对于所述构件的近端20弯曲或振荡。这可以允许例如突出构件的远端22的横向扫掠运动,其中柔性在横向方向上(意味着垂直于突出构件的高度轴线的方向)。
该构件本身可以由柔性材料形成以促进该柔性(例如,被动地通过弹性体变形或主动地通过致动例如远端22的局部硬化或硬化),或者该构件可以经由连接元件连接到支撑表面,该连接元件允许突出构件相对于支撑表面例如横向地或轴向地弹性移位。这可以是柔性的或弹性的连接构件,或者它可以是旋转接头或其他连接元件,该旋转接头或其他连接元件适于用于在该构件的近端上施加偏置力以便将其朝向中性位置偏置。
装置100还可以包括用于向突出构件施加运动的致动器,例如诸如振荡的周期性运动。致动器可以是振荡机构82,其被布置成引起突出构件的至少远端部分的振荡。
所述至少两种模式之间的切换可基于调节所述突出构件的振荡频率。
图7和图8中示出了一个示例。图7示出了口腔清洁单元10,图8示出了口腔清洁或处理装置的部件,包括机械振荡机构82(例如振动器、传动系)形式的致动器。图8的示例中的振荡机构适于向支撑主体12施加横向振荡。然而,在其他示例中,振荡机构可以适于施加竖直振荡(例如轻敲运动(tapping motion)),或者在一些示例中施加旋转(径向)振荡。
在图7和图8中,每个突出构件适于在横向方向34上是柔性的,横向尺寸垂直于构件的高度尺寸32(H),以允许突出构件的至少远端部分相对于构件的近端20弯曲或横向振荡。每个突出构件的高度轴线从近端20延伸到远端22。
模式之间的改变可以基于在突出构件14a、14b的近端20处施加的驱动振荡的改变特性。振荡可以施加到支撑主体12本身,从而引起与突出构件连接的支撑表面13的振荡。
例如,在至少一种模式中,可以在支撑表面13处施加适当的致动或振动,以引起每个突出构件的近端20的振荡位移。由于突出构件的横向柔性,这引起突出构件14的远端部分的横向振荡运动,这导致RF场在该模式下在较宽区域上扩展,并且引起RF场的高强度区域的位置的振荡变化。因此,这可以用于实现更宽区域的分布式清洁模式。在另一模式中,振荡可被禁用或设定为较低水平,从而导致更局部集中的场强度分布,其适于局部高强度清洁动作。
在一些模式中,频率可以是零,使得突出构件14不振荡,而是保持静止。
每个突出构件的远端22可适于响应于近端20的横向振荡而相对于近端20横向弯曲或振荡。
作为示例,每个突出构件可适于具有至少±5°的最大横向偏转角的柔性。作为非限制性示例,每个突出构件可具有例如从±5°到±45°的任何地方的最大横向偏转角。
如上所述,每个突出构件14、14b可以是薄片状构件的形式。在图8中示出了一个示例,该示例以透视图示出了清洁单元10。
如图所示,薄片状突出构件14a、14b各自从支撑表面13上的线延伸,并且因此在支撑表面上限定了细长的线性覆盖区。在该示例中,两个突出构件布置成彼此面对。
在该示例中,每个片状突出构件14a、14b的平面垂直于横向尺寸34延伸,使得每个突出构件适于在垂直于其限定的平面的方向上是柔性的。突出构件的偏转方向由图8中的弓形箭头示出。
突出构件14的薄片形状增强了柔性,因为构件的抗挠刚度在垂直于薄片平面的方向上减小。这也有助于限制或限定构件的横向柔性方向,即垂直于薄片状构件平面的尺寸。
图9示出了清洁单元10的另一示例。
这里,清洁单元10包括布置成第一排的多个第一突出构件14a和布置成第二排的多个第二突出构件14b,第一排布置成与第二排间隔开并且面向第二排。
将突出构件14断裂成多个较小的突出构件可以有助于调整构件的期望振荡特性。较小的构件可由于其较小的质量而呈现例如较小的偏转幅度。它们可以具有不同的横向振荡固有频率,这可用于调节电极的振荡共振频率。这将在后面更详细地讨论。
为了实现柔性,每个突出构件14a、14b可以包括柔性材料。在该示例中,每个构件至少部分地由柔性材料形成。每个构件可以例如完全由柔性材料构成,或者仅一部分可以由柔性材料形成。
作为一个可能的示例,每个突出构件可以包括尼龙材料,或者可以包括诸如橡胶的弹性体材料。
在其他示例中,可以以不同的方式实现柔性,例如利用连接在突出构件的近端和支撑表面之间的柔性枢轴或接合构件。
根据一组实施例,每个突出构件可以包括至少部分地涂覆有柔性聚合物的一个或多个导电电极元件。这是有利的,因为导电电极芯在其侧面周围由聚合物绝缘,提高了安全性和/或降低了与其它突出构件短路的风险。
然而,在备选实施例中,突出构件14可以包括柔性聚合物芯,该柔性聚合物芯涂覆有导电外层以提供电极。其它示例包括由金属和聚合物的层压件形成的片状突出构件。
在另外的示例中,突出构件14可以由导电聚合物材料形成。与金属相比,这种材料通常具有更大的弹性,因此允许它们提供用于RF能量传输的导电特性以及所需的弹性特性。这将简化制造,因为每个构件可以仅由单一材料形成,而不是由两种材料形成。
然而,另一备选方案还包括由薄片状金属元件形成的突出构件14,平坦的薄片状形状提供必要的横向柔性,并且金属材料提供所需的导电特性。可以使用任何合适的导电金属。优选的示例可以是不锈钢。
装置100可配置为第一模式和至少第二模式,在第一模式中突出构件14a、14b具有零振荡,在第二模式中突出构件具有非零振荡。在零振荡模式中,突出构件14a、14b相对于支撑表面13基本上静止。这对于产生局部高强度场是有用的。
如上所述,致动或振荡机构82可布置成以可调节的频率振荡清洁单元10的支撑表面13,从而引起突出构件14a、14b的振荡,并且其中在模式之间切换包括调节支撑表面的振荡频率。
这在图8中示出,图8示出了致动或振荡机构82,该致动或振荡机构82被布置成向支撑主体12(例如台板)施加振荡,由此引起支撑表面13的振荡。
致动或振荡机构82可以包括用于产生振荡运动的马达或致动器,以及被布置成将振荡运动机械地耦合到清洁单元10的机械耦合元件83,例如驱动轴或其它机械连接器。这些部件可以形成用于该装置的传动系。
该装置还可以包括控制器21,该控制器与机械振荡器可操作地耦合,并且适于通过振荡机构82的马达来控制清洁单元的振荡频率。控制器可以基于控制机械振荡器来控制不同模式之间的切换。
口腔清洁单元10可以包括机械连接部分(未示出),例如连接槽或凹槽,其形状适于接纳致动或振荡机构82的连接元件83(例如驱动轴),并且布置成将致动或振荡机构的致动或振荡连接到支撑表面13。
机械致动或振荡机构82可特别地布置成引起清洁单元支撑表面13的横向振荡。例如,振荡可以被配置为引起突出构件14的至少远侧尖端横向振荡。尖端是指突出构件的终点。
应当注意,使用机械致动或振荡机构82不是用于引起突出构件运动的唯一手段。例如,备选地,可以提供专用的致动器或驱动器,该专用的致动器或驱动器被布置成直接在所述突出构件上施加偏置力或推动力以引起运动。这可能引起振荡运动或不同的运动模式。它可以简单地改变突出元件的位置,从而重新配置所产生的RF场模式。
清洁单元10还可以包括多个清洁元件42,例如用于清洁牙齿的刷毛,其从清洁单元的表面向外延伸。由机械致动或振荡机构82引起的清洁单元的振荡可布置成引起刷毛42的振荡。换言之,驱动刷毛振动的振荡也驱动突出构件14a、14b的运动或振荡。
刷毛42和突出构件14a、14b优选地耦合到相同的表面13,并且因此相同的振荡动作能够驱动两者的振荡。
根据一组有利的实施例,每个突出构件的至少一部分可以相对于构件的近端20表现出固有频率的振荡(例如横向振荡),并且其中,在第一模式中,支撑表面13的所述振荡频率被设定为与所述固有频率谐振的频率,并且在第二模式中,支撑表面的所述振荡频率被设定为与固有频率不谐振的频率。
与固有频率谐振的频率是指例如与所述固有频率匹配或为谐波的频率,换言之,被配置为导致或引起突出构件14的谐振振荡的频率,即,使得突出构件处于谐振。在第二模式中,选择频率使得其不引起突出构件的谐振振荡。
因此,在第一模式中,引起突出构件14a、14b的谐振振荡,这导致靠近电极18a、18b的场的高强度区域在更宽的区域上扫过。因此,在第一模式中,突出构件(例如,突出构件的远侧尖端)的振荡幅度(由图8中的弓形箭头指示)被最大化,并且此外可以大于施加到清洁单元的支撑表面13的振荡幅度。在第二模式中,振荡幅度被减小,从而将高强度场处理限制在更小的区域,该区域由此接收更大的时间平均辐射强度。
因此,第二模式可用于局部、靶向、高强度RF处理,而第一模式可用于更一般或更大面积的处理。
如上所述,清洁单元10还可以包括从清洁单元10的表面13向外延伸的用于清洁牙齿的多个刷毛42,并且清洁单元通过机械振荡机构的振荡可设置成引起刷毛的振荡。
因此,上述实施例允许输送的RF处理模式与刷毛42的振荡动作完全分离或分开。特别地,通过改变支撑主体12的振荡频率,并根据突出构件14的机械共振频率来协调该振荡频率,可以独立于刷毛的运动动作来控制由装置100传递的RF能量场的形状和强度分布。
每个突出构件14a、14b的共振频率(固有频率)取决于突出构件的材料特性以及其尺寸(高度、宽度、厚度)。每个构件14的横向振荡的固有频率可以由此基于在制造中调整这些参数来调整。
为了增大振荡的自然振幅,突出构件14a、14b的远侧尖端22可以被设计成具有比该构件的其余部分更大的质量密度,这样使得该构件朝向其远端被加重(质量中心比近端20更靠近该构件的远端22)。
突出构件14的固有振荡频率也由它们的宽度决定。因此,可以通过提供多个较短宽度的突出构件来实现较高的固有频率,例如上述图9的示例所示。
作为非限制性示例,由振荡机构82施加到支撑主体的振荡可以在50Hz-500Hz范围内的任何地方。突出构件的固有共振频率可适于为振荡频率范围的子范围。
在有利的示例中,在第二模式中,支撑表面13的振荡频率可以设定为与突出构件14a、14b的固有频率反谐振的频率。
反谐振意味着例如反谐波。这意味着例如它被设置在固有频率的谐波之间的频率,例如在第一谐波和第二谐波之间。
这意味着在第二模式中,振荡与突出构件14a、14b的固有频率反谐振,意味着突出构件的运动幅度减小并且构件理想地保持静止。
根据另一组实施例,突出构件14a、14b中的每一者可具有连接到支撑表面13的近端20,并且其中相遇或围绕每个突出构件的近端的支撑主体12的区域42具有第一组机械共振频率,并且表面的其余部分44具有第二组共振频率。
在第一模式中,可以驱动支撑表面13以两个区域都谐振的频率振荡。在第二模式中,可以驱动支撑表面以与第一区域非谐振并且与第二区域谐振的频率振荡。因此,该实施例遵循与上述谐振突出构件实施例类似的概念,除了这里是与突出构件14a、14b耦合的支撑结构12,该支撑结构12被配置为具有在不同频率下进行谐振的可能性。特别地,支撑结构12设置有具有不同谐振频率或频谱的不同材料区域。
该概念在图10中示出,图10示出了突出构件14a中的一个和其所连接的支撑表面13的区域42。该区域可称为支撑表面的晶胞(unit cell)。当以第一频率和第二频率(频率1和频率2)中的每个频率振荡时,支撑表面的一部分在图10中示意性地示出。表面区域42表示支撑表面13的区域或晶胞,第一突出构件14a和第二突出构件14b的近端将连接到该区域或晶胞。表面区域44示出了支撑表面其余部分的区域或晶胞。在第一模式(“模式1”)中,支撑表面13以频率1振荡。在第二模式(“模式2”)中,支撑表面13以频率2振荡。
与每个突出构件14a、14b相邻或围绕每个突出构件14a、14b的材料区域42被配置为在第一组频率内表现出共振,并且剩余区域44(例如,刷毛从其突出)被配置为在第二组重叠的频率处表现出谐振振荡。
如果需要分布式、广域RF清洁模式,支撑结构12可以在模式1中被驱动,振荡的频率(频率1)在两组支撑结构区域的一组谐振频率内(在两组区域的谐振频率之间的重叠范围内)。结果,支撑表面42、44的所有晶胞被诱导以谐振振荡(在图10中由每个单元中的波浪线表示)。结果,由于区域42的振荡,在突出构件14a、14b的近端处引起振荡。因此,引起突出元件振荡,导致空间分布的RF强度分布。
相反,如果需要局部高强度清洁模式(“模式2”),支撑结构12可以用振荡频率驱动,该振荡频率在邻近突出构件14a、14b的区域42的谐振频率组之外,但是它是支撑结构12的剩余区域44的谐振频率。在这种模式下,突出构件不会引起大振幅的振荡,因为它们所连接到的支撑表面13的单元42不谐振地振荡(如通过单元42b的清晰填充示意性地指示的),而刷毛仍然可以高振幅振荡,因为它们所连接到的表面的区域44谐振地振荡。
优选地,在第二模式中,支撑表面可被驱动以与通向或围绕每个突出构件14a、14b的支撑主体的区域42的谐振频率范围反谐振或反谐波的频率振荡。
突出构件14a、14b可以各自具有在支撑表面13的区域42的所述第一组机械谐振频率内的固有或谐振振荡频率,突出构件14a、14b连接到支撑表面13的区域42。在一些示例中,它可以具有相同的机械共振频率组。
根据一个或多个实施例,可以通过使用声学超材料来实现支撑表面的不同区域42、44的不同谐振频率范围。
超材料(metamaterial)是一种新兴技术,并且涉及通过其结构(一种或多种材料的几何布置)而不是通过其材料组成来表征的工程材料。超材料能够实现在天然存在的材料中不可获得的新的物理性质和特征,例如负折射率。
可以形成表现出负的或接近零的动态密度和/或弹性模量的声学超材料。声学超材料可以由例如周期性布置的亚波长晶胞构成。声学超材料的特征在于表现出机械(声学)频带,其中不能发生穿过材料的波传播。这些非传播频带被称为材料的带隙。材料的不同单元可以具有不同的带隙。这实现了操纵能量的非常规方式。
对于本发明的实施例,声学超材料使得能够提供具有上述不同材料区域42、44(晶胞)的支撑主体12(例如台板)。可以设置超材料支撑主体12,其中,与突出构件14连接的晶胞42具有第一带隙(不能发生声振动的频率范围),而剩余的晶胞44不具有该带隙,或者具有不同的带隙。在第一模式中,支撑主体可以在所有材料区域42、44的带隙之外的第一频率处振荡。这导致支撑主体的所有区域的振荡,包括在突出构件的基部处的区域。因此,突出构件振荡并产生空间分布的RF场。在第二模式中,支撑主体可以在第二频率处振荡,所述第二频率在与突出构件连接的区域42的(第一)带隙内,但不在剩余区域44的任何带隙内。这导致支撑表面13的除了在突出构件的基部处的区域之外的所有区域的振荡。结果,突出构件不会振荡。
在一些实施例中,可以提供声学超材料支撑主体12,其包括呈现带隙的一个或多个材料区,并且其中多个突出构件14的子集在这些区域内连接到支撑表面13,并且另外的子集在这些区域外连接到支撑表面13。这产生了一种清洁单元,在该清洁单元中限定了空间区域,在该空间区域中不能发生一定频率处的振动,因此当支撑主体以带隙内的频率振动时,位于这些区域中的突出构件的子集将不会振荡。因此,当支撑主体以这些频率振动时,突出构件的区域基本上保持静止,从而在这些区域中产生局部较高强度的RF场。
这些具有带隙的超材料区域可以被定位在清洁单元的支撑表面13上的位置处,当清洁单元被接纳在口腔中时,这些超材料区域被设计成与口腔中的结构的某些解剖学特征相一致。例如,该装置可以是喉舌装置,并且带隙区域可以形成在喉舌表面的某些区域。
根据一组有利的实施例,该装置可以包括允许选择性地调整突出构件的不同子集的振荡特性的装置,以进一步调整所产生的RF场的空间强度分布。这可以以不同的方式实现。
在一组实施例中,主动机械阻尼元件可设置在每个突出构件的近端,适于对每个构件的近端施加可调节的机械阻尼。这样,响应于由机械致动或振荡机构82施加的振荡,可以选择性地调节突出构件的不同子集的振荡幅度。例如,高水平的阻尼可施加到突出构件的第一子集,低水平或零阻尼施加到第二子集,使得与第二子集相比,第一子集相对于支撑表面呈现减小的振荡振幅。被阻尼的构件的特定子集和未被阻尼的子集可以在不同模式之间被调节(例如通过控制器21),从而在不同模式之间调节所得到的RF场的空间强度分布。
阻尼元件可以包括例如环元件,该环元件围绕每个突出构件的基部延伸并且可操作以在突出构件上施加可调节的径向向内的力以施加可调节的机械阻力。
附加地或备选地,根据一个或多个实施例,突出构件的不同子集的振荡特性可以基于提供突出构件而被调节成不同模式,突出构件的不同子集表现出不同的振荡固有频率。这样,基于在不同模式中选择性地调节施加到构件(例如,施加到支撑表面)的机械振荡的频率,可以在不同模式中引起不同子集以更大或更小的振幅振荡。
附加地或备选地,根据另一组实施例,可以提供一种辅助致动或强制装置,该辅助致动或强制装置被布置成向所述突出构件的至少一个或多个子集提供辅助致动或强制。这可以例如用于选择性地抵消施加到支撑表面的用于使刷毛振荡的主振荡。
根据一个或多个实施例,口腔清洁或处理装置100还可以包括磁力装置或电磁力装置,其可操作以在每个突出构件上施加磁力或电磁力,并且其中模式之间的切换包括部分地基于磁力装置或电磁力装置的使用来调节突出构件的运动模式。强制装置可以是有源的或无源的。
为简洁起见,在此将该装置简称为磁力装置。
图11中示意性地示出了一个示例。这示出了包括磁力装置和一对突出构件14a、14b的示例清洁单元10。清洁单元还包括多个刷毛束42,其在图11中示意性地示出。在该示例中,强制装置是有源强制装置。
在该示例中,磁力装置包括位于第一突出构件和第二突出构件之间的另一(中心)突出构件92。在一些示例中,这可以是电介质阻挡构件,用于使RF场进一步成形。
第一突出构件14a和另外的突出构件92中的一个包括永磁体94,而另一个包括螺线管88a,其定位在永磁体的磁场中。螺线管可以包括例如线圈或线圈环。
第二突出构件14b和另外的突出构件中的一个还包括永磁体94,而另一个包括定位在永磁体的磁场中的螺线管88b。螺线管可以包括例如线圈或线圈环。在该示例中,在中央突出构件92中提供单个永磁体,用于磁耦合第一突出构件14a中的第一螺线管88a和第二突出构件14b中的第二螺线管88b。
施加在每个突出构件14a、14b上的合成磁力可基于控制供应到相应螺线管88a、88b的电流来控制。还可以提供控制器以控制提供给螺线管的电流。
为了改变不同模式之间的空间RF场强度分布,这可以单独使用或与上面概述的其它特征结合使用,以控制突出构件14a、14b在不同模式中的位置或运动。
例如,根据一个或多个实施例,支撑表面13可以以第一频率振荡。这可以部分地用于使例如清洁单元的刷毛42振荡。在该装置的一种模式中,可以控制磁力装置以与支撑表面的振荡同步地在突出构件14a、14b上施加(磁的或电磁的)反作用力的模式,从而抵消由于支撑表面13的运动而引起的突出构件14a、14b的运动。
支撑表面13的振荡可用于使清洁单元10所包括的并延伸出支撑表面13的刷毛42振荡。由于这种振荡,在没有反作用力的情况下,也会引起突出构件振荡。对于局部更集中的强度模式,期望突出构件基本上是静止的,或者它们的振荡被最小化。磁力装置与支撑表面振荡同步地(或反同步地)施加合成电磁力,以便抵消否则将由于支撑表面振荡而发生的每个突出构件的运动。
这在图12中示意性地示出,图12示出了磁力装置在高强度清洁模式下的操作,其中期望突出构件14a、14b相对于支撑表面13基本静止。在图12的示例中,支撑主体12以横向振荡被驱动,并且磁力装置被布置成施加反作用力以抵消突出构件的横向振荡。然而,在其它示例中,振荡和对应的反作用力可以在其它方向上,例如径向(旋转)振荡和反作用力,或竖直或轴向(上下)振荡和反作用力。
图12示出了以横向振荡驱动的支撑表面。图12a示出了支撑主体12沿第一方向的振荡相位,图12b示出了支撑主体12沿相反的第二方向的振荡相位。表面13在每个相位中的这种运动(由黑色箭头表示)在每个突出构件上施加对应的横向力(由白色箭头表示)。在第一阶段(图12a)中,环、线圈或平面螺线管88a、88b由第一方向上的电流驱动,从而产生磁场感应反作用力(由阴影箭头指示),该反作用力将第一突出构件14a拉向中央突出构件92并且将第二突出构件14b推离中央构件92。在第二阶段(图12b),环、线圈或平面螺线管88a、88b由相反方向的电流驱动,从而产生具有力(由阴影箭头表示)的磁场,该力将第一突出构件14a推离中心突出构件92并且将第二突出构件14b拉向从中心构件92。因此,所产生的磁力被控制以抵消由振荡的支撑表面引起的突出构件的运动。优选地,反作用力精确地匹配振荡力,使得突出构件保持静止(无振荡)。
在至少第二模式中,可以禁用磁力机构。然后,第二模式可以是广域清洁模式。因此,在第二模式中,突出构件14a、14b由于支撑表面13在它们的近端20处的振荡而自由地振荡,并且因此场强分布在空间上更加分布或均匀。
在另外的实施例中,磁力装置可单独使用以引起突出构件14a、14b的一定模式的振荡运动,而不通过机械振荡机构82振荡。
螺线管88a、88b和螺线管的示例性驱动电路装置在图13中示意性地示出。为了便于说明,螺线管线圈显示为面向页面外。然而,在实践中,每个线圈将被布置成面向包含永磁体的中央突出构件92(即,与图13中所示的取向成90度)。
每个螺线管88a、88b包括导电线圈,该导电线圈可以例如雕刻或压印到每个突出构件14a、14b上。线圈可以是平面线圈,或者可以是管状的。它可以是单环路线圈或多绕组线圈。在线圈被雕刻的地方,可以施加电绝缘层覆盖线圈以防止与RF电极18的干扰。如图所示,在该示例中,第一螺线管88a和第二螺线管88b并联地电耦合在一起,并且电路的轨道连接到振荡驱动器86。因此,螺线管的驱动在该示例中是同步的(尽管在替代示例中异步驱动也是可能的)。
在有利的示例中,通过使用共享的振荡驱动器或信号发生器来控制磁力装置的驱动和机械振荡机构82例如传动系(其使支撑结构12振荡)的驱动被保持同步。该振荡驱动器可以由机械振荡机构本身构成,使得磁力装置由振荡机构的驱动器驱动。例如,在电动牙刷中,共享驱动器可以是电动牙刷的传动系。
在图14中示意性地示出了这种布置的示例。
如图所示,机械振荡器82包括电振荡信号发生器86,其产生电流,该电流驱动机械振荡器的马达以使支撑主体振荡。该信号发生器进一步耦合到磁力装置的驱动电路。因此,这两者被彼此同步地驱动,使得由螺线管88a、88b产生的磁力总是与横向振荡力同时产生,使得一者可抵消或消除另一者。
上述磁力装置的示例涉及有源磁力装置的示例。然而,无源选项也是可能的。
例如,该装置可以包括代替上述图12-图14的示例中的每个螺线管88而设置的导电板或片,其具有面向永磁体设置的平坦表面。当这种导电片在第一方向上相对于永磁体运动时,这在导电片中感应出涡流,并且所述涡流感应出次级磁场,该次级磁场感应出与导电片的运动方向相反的磁力。因此,这种布置提供了无源涡流阻尼器,其磁性地抵抗由支撑表面的振荡(通过机械振荡器82)引起的突出构件的运动。
以上已经描述了多个实施例,其中通过机械装置实现装置的不同模式之间的改变,包括控制突出构件的位置或运动模式的改变。这影响所得到的RF场的空间强度分布的变化。
根据一个或多个实施例,任何上述机械方法可以与用于控制RF场强度分布的任何电装置组合。例如,突出构件电极的不同子集可以被选择性地电激活或禁用。例如,控制器可以被布置为选择性地将驱动信号提供给正在振荡的突出构件的子集的电极,而将提供给被控制为不振荡(例如通过反作用力)的电极的子集的驱动信号禁用,反之亦然。
口腔清洁和/或处理装置100还可以包括机械和电耦合到清洁单元的控制单元或主体部分92。在该示例中,机械振荡机构82可以被容纳在主体部分中。RF发生器84也可以被容纳在主体部分(图14中未示出)中。控制器21还可以设置在主体部分(未示出)中,可操作地连接到振荡机构和RF发生器84两者,并且适于控制装置的模式的配置。
应当注意,尽管在上述示例中,不同模式之间的改变是基于改变突出构件的运动模式,但这不是机械地改变RF场强度分布的唯一方式。其它示例可以简单地包括改变突出构件的位置,从而改变所得到的场分布,例如将突出构件展开得更远,以将RF场更宽地展开,或者将突出构件推得更近,以获得更局部聚焦的场。这可以通过例如合适的致动器来实现。合适的致动器可以包括例如压电致动器元件、铁电聚合物致动器、电容式微机械超声换能器(CMUT)致动器元件、电活性聚合物(EAP)致动元件、电磁流变致动器或任何其它合适的示例。
如上所述,口腔清洁和/或处理装置可以采用不同的形式。在一个示例中,装置100是牙刷装置。图15中示意性地示出了一个示例。该示例中的清洁单元10是用于牙刷的刷头。
该装置还包括容纳RF发生器84的主体部分92,该主体部分机械地和电气地连接到清洁单元10。在图15所示的示例中,主体部分还容纳机械振荡机构82,其中包括一个机械振荡机构82。主体部分还可以容纳控制器21,控制器21可操作地耦合到RF发生器和机械振荡机构,并且适于控制不同模式之间的切换。
主体部分92与清洁单元10部分电连接和机械连接。图15示意性地示出了机械连接器元件83(例如驱动轴),该机械连接器元件将振荡器机构82与清洁单元支撑主体12机械地耦合。主体部分92形成装置的手柄。在头部和主体部分之间还提供电连接。
可选地,清洁单元10可被布置成可释放地连接到主体部分92,使得清洁单元能够从主体部分拆卸。
也可以提供其它类型的口腔清洁和/或处理装置,例如不包括连接手柄或主体部分的刷喉舌装置(brushing mouthpiece devices)。
作为非限制性示例,可以根据本发明的实施例提供的示例性口腔清洁或处理装置包括:
-牙刷装置(例如电动牙刷);
-口腔冲洗器;
-牙线清洁装置;
-组合的刷牙和牙线清洁装置,例如适于同时提供动力刷牙和输送流体流或射流的装置;以及
–喉舌装置,例如刷喉舌装置。
根据本发明另一方面的实施例提供了一种配置口腔清洁装置的处理模式的方法。
口腔清洁装置,包括:
清洁单元,包括:支撑主体,从该支撑主体的支撑表面向外延伸的至少两个突出构件,并且每个突出构件包括一个或多个电极,所述突出构件彼此间隔开,以及
RF发生器,该RF发生器设置成向第一电极和第二电极提供驱动信号,以在第一突出构件和第二突出构件周围和之间的区域中感应RF场,从而当口腔清洁单元被接纳在口腔中时提供口腔清洁功能。
该方法包括:
在至少两种处理模式之间选择性地调节该装置,第一模式中,该装置被布置成用于产生具有第一空间强度分布的RF场,并且第二模式中,该装置被布置成用于产生具有不同的第二空间强度分布的RF场,并且
其中所述模式之间的切换包括控制所述突出构件的位置或运动模式的改变,和/或包括控制所述RF发生器的驱动信号或驱动方案的特性的改变。
为了进一步说明本发明的原理,图16概述了根据一个或多个实施例的有利集合所遵循的示例工作流。该工作流例如可以是由根据一个或多个实施例的装置的控制器实现的控制方法。
根据本示例的清洁或处理装置可在代表标准清洁模式的至少第一模式(“模式1”)和代表处理模式的至少第二模式(“模式2”)下操作。处理模式可以用于在口腔的特定局部区域中施加适配的RF场(具有适配的场形状),用于处理该区域,例如更强烈的RF清洁,或不同的RF处理模式或类型。
装置默认地在第一清洁模式202中启动。
控制器适于检测装置的清洁单元何时接近已知需要补充RF处理的预定感兴趣区域,例如故障点。这可以基于位置和/或取向传感器的使用。响应于检测到清洁单元接近感兴趣区域,控制器触发206到第二模式(“模式2”)的转换。备选地,基于来自诸如按钮的用户输入元件的用户输入命令,可以手动触发向第二模式的转换。
在第二模式中,与第一模式相比,所产生的RF场的空间强度分布被改变。RF场分布的修改可以以如上所述的不同方式实现。基于改变突出构件的位置或运动模式,可以机械地实现208场分布的改变。附加地或备选地,基于选择性地激活或禁用突出构件的选定的不同子集的电极,场分布的改变可以被电实现。后一种方法允许向电极的特定空间模式提供驱动信号以产生RF场能量,使得可以产生具有期望的合成场分布的合成RF场。
在机械208或电子210适应场分布或两者之后,可以实现可选的另外的步骤212,包括改变RF场的一个或多个另外的电特性。该步骤可以包括以下项中的一项或多项:
实施RF频率的循环扫描;
改变RF场的频率;以及
实现脉冲RF场,并且调整RF脉冲的占空比。
具有改变的RF场的处理模式(“模式2”)持续直到达到预定的退出触发214。例如,回到第一模式的改变可以在预定时间过去之后触发,或者直到已经传送了一定量的RF能量,例如已经传送了一定数目的RF脉冲,或者直到控制器检测到清洁单元已经从预定的感兴趣区域(例如故障点)移开。
如上所述,某些实施例利用控制器。控制器可以用软件和/或硬件以多种方式实现,以执行所需的各种功能。处理器是采用一个或多个微处理器的控制器的一个示例,所述微处理器可使用软件(例如,微代码)编程以执行所需功能。然而,控制器可在使用或不使用处理器的情况下实施,并且还可实施为执行某些功能的专用硬件与执行其它功能的处理器(例如,一个或多个经编程微处理器及相关联电路)的组合。
可以在本发明的各种实施例中采用的控制器组件的示例包括(但不限于)常规微处理器、专用集成电路(ASIC)和现场可编程门阵列(FPGA)。
在各种实现中,处理器或控制器可以与诸如易失性和非易失性计算机存储器(诸如RAM、PROM、EPROM和EEPROM)之类的一个或多个存储介质相关联。存储介质可以编码有一个或多个程序,当在一个或多个处理器和/或控制器上执行时,该程序执行所需的功能。各种存储介质可以固定在处理器或控制器内,或者可以是可传送的,使得其上存储的一个或多个程序可以被加载到处理器或控制器中。
通过研究附图、公开内容和所附权利要求,本领域技术人员在实践所述的本发明时可以理解和实现所公开实施例的变型。在权利要求中,词语“包括”不排除其他元件或步骤,并且不定冠词“一”或“一个”不排除多个。
单个处理器或其它单元可以实现权利要求中所述的若干项的功能。
在相互不同的从属权利要求中叙述某些措施的事实并不表示不能有利地使用所述措施的组合。
如果在权利要求或说明书中使用术语“适于”,则应注意,术语“适于”旨在等同于术语“被配置为”。
权利要求中的任何附图标记不应解释为限制范围。