手术器械
文献发布时间:2023-06-19 10:11:51
本申请是申请日为2016年6月29日、申请号为201680038071.8
(PCT/US2016/040018)、发明名称为“手术器械的致动闭锁”的发明专利申请的分案申请。
技术领域
公开的各实施方式涉及手术器械的致动闭锁。
背景技术
在手术修复疝气或其他组织缺损期间,通常使用手术网状织物或其他假体修复织物。假体修复织物可以在开放手术中放置或以腹腔镜放置。为了将修复织物固定就位,一个或更多个紧固件可以穿过假体修复织物配置并进入下面的组织。
发明内容
在一个实施方式中,手术器械包括动力传动装置,该动力传动装置包括触发器和操作性地联接至触发器的紧固件驱动器。触发器从第一构型至第二构型的致动使紧固件驱动器至少在第一位置与第二位置之间移动。手术器械还包括致动闭锁系统,该致动闭锁系统与动力传动装置操作性地相关联。致动闭锁系统能够在锁定构型与解锁构型之间移动。致动闭锁系统在其处于锁定构型时防止紧固件驱动器从第一位置向第二位置移动。触发器从第一构型朝向第二构型的致动使致动闭锁系统从锁定构型移动至解锁构型。
在另一实施方式中,手术器械包括动力传动装置,该动力传动装置包括触发器和操作性地联接至触发器的紧固件驱动器。触发器从第一构型至第二构型的致动使紧固件驱动器至少在第一位置与第二位置之间移动。手术器械还包括:一个或更多个锁定表面,所述一个或更多个锁定表面与紧固件驱动器相关联;以及控制表面,当从第一构型朝向第二构型致动触发器时,该控制表面能够在锁定构型与解锁构型之间移动。控制表面在其处于锁定构型时阻挡一个或更多个锁定表面中的至少一个锁定表面的运动以防止紧固件驱动器在第一位置与第二位置之间的运动。
在另一实施方式中,一种操作手术器械的方法包括:首先使用致动闭锁系统限制与触发器操作性地相关联的紧固件驱动器的移动;从第一构型朝向第二构型致动触发器;使致动闭锁系统响应于触发器的所述致动而从锁定构型移动至解锁构型;以及当致动闭锁系统处于解锁构型时使紧固件驱动器从第一位置移位至第二位置。
应当理解的是,下面讨论的前述概念和附加概念可以以任何合适的组合来布置,因为本公开不限于这方面。此外,本公开的其他优点和新颖特征将从以下在结合附图考虑时详细描述的各种非限制性实施方式中变得明显。
附图说明
附图并不意在按比例绘制。在附图中,各图中所示出的每个相同或几乎相同的部件可以由相同的附图标记表示。为了清楚起见,并非每个部件都可以标注在每幅图中。在附图中:
图1是手术器械的示意图;
图2是图1的手术器械的远端端部的分解图;
图3是包括致动闭锁系统的手术器械手柄的截面图;
图4是致动闭锁系统的分解图;
图5是处于锁定构型的图4的致动闭锁系统的立体图;
图6是处于锁定构型的图4的致动闭锁系统的俯视图;
图7是处于解锁构型的图4的致动闭锁系统的立体图;
图8是处于解锁构型的图4的致动闭锁系统的俯视图;
图9是处于联接构型的旋转联接件的立体图;以及
图10是处于断开联接构型的图9的旋转联接件的立体图。
具体实施方式
发明人已经认识到与提供包括致动闭锁系统的手术器械相关的益处,该致动闭锁系统限制和/或防止紧固件驱动器的移动直到实现期望的紧固件配置为止。发明人已经认识到,典型的致动闭锁系统在手术装置能够被致动之前需要来自使用者的启动步骤比如扳动单独的安全开关来解锁系统。这种启动步骤是麻烦的、令人困扰的和/或不方便的。因此,在一些情况下,可能期望在不需要来自使用者的单独的步骤的情况下解锁致动闭锁系统。因此,发明人已经认识到与在触发器被致动时从锁定构型移动至解锁构型的致动闭锁系统相关联的优点。这种系统消除了对于使用者解锁装置的任何附加动作的需要,由此提供了更简单和/或更直观操作的手术器械,并且无论使用者是否记得接合/断开接合致动闭锁系统都提供功能。
在一些实施方式中,手术器械包括动力传动装置,该动力传动装置具有操作性地联接至紧固件驱动器的触发器。动力传动装置将由使用者施加至触发器的力传递至紧固件驱动器,该紧固件驱动器从手术器械的远端端部配置紧固件。动力传动装置可以包括在触发器与紧固件驱动器之间以任何合适的方式布置的任何数量的部件。例如,可以包括在触发器与紧固件驱动器之间的动力传动装置中的部件包括正齿轮、斜齿轮、冠齿轮、蜗轮、行星齿轮系统、传动带、离合器接合面、连杆机构或能够将动力从一个部件传递至另一个部件的任何其他合适的部件。此外,还设想了其中触发器直接联接至紧固件驱动器的实施方式,和其中触发器未联接至紧固件驱动器(例如,马达驱动的手术器械)的实施方式,这是因为本公开不限于此。
此外,应当理解的是,本公开不限于任何特定类型的紧固件驱动器。例如,紧固件驱动器可以以旋转的和/或线性的方式移位以向手术紧固件施加配置力。在一些实施方式中,紧固件驱动器是形成为中空管的旋转件,并且紧固件驱动器包括布置在其远端端部的内部的紧固件。替代性地,紧固件驱动器可以是实心杆或实心轴,并且紧固件驱动器可以包括布置在其外表面上的紧固件,使得紧固件驱动器的旋转运动和/或线性运动使紧固件移位。在另一些实施方式中,紧固件可以相对于紧固件驱动器的远端端部定位在远端,使得紧固件驱动器的远端端部与紧固件接合并在紧固件驱动器以旋转的和/或线性的方式移动时配置紧固件。因此,应当理解的是,紧固件驱动器可以包括能够将配置力传递至紧固件的任何结构,这是因为本公开不限于任何特定的布置。
根据特定实施方式,紧固件驱动器可以设置成以旋转的和/或线性的方式配置紧固件;因此,动力传动装置和紧固件驱动器可以构造成向紧固件提供相应的旋转力和/或线性力。在一个这样的实施方式中,将触发器从第一构型致动到第二构型使紧固件驱动器从第一位置移动至第二位置。例如,在以旋转的方式配置紧固件的情况下,紧固件驱动器在第一旋转位置与第二旋转位置之间移动使得紧固件驱动器的旋转向紧固件施加旋转力。替代性地,在以线性的方式配置的紧固件的情况下,紧固件驱动器从第一近端位置向远端移动至第二远端位置,使得紧固件驱动器向紧固件施加向远端定向的力。在另外的实施方式中,紧固件驱动器可以以旋转和线性这两种方式移动来配置紧固件。因此,应当理解的是,本公开并不限于紧固件驱动器的任何特定的移位方向,使得紧固件驱动器可以轴向移位、旋转移位、以两种方式的组合移位或以任何其他适当的方式移位。
如上面所指出的,手术器械可以包括致动闭锁系统,以防止手术器械的致动,直到触发器被致动为止。致动闭锁系统可以与动力传动装置的任何部分相关联,包括触发器、紧固件驱动器和/或位于触发器与紧固件驱动器之间的任何中间部件。此外,致动闭锁系统可以选择性地防止可能由例如手术器械的振动、操作和运输或其他来源引起的紧固件驱动器的移动。通过防止紧固件驱动器的不期望的移动,致动闭锁系统还可以防止手术紧固件的关联移动。
在一些实施方式中,致动闭锁系统能够在锁定构型与解锁构型之间移动,在锁定构型中,紧固件驱动器的移动受到限制,在解锁构型中,紧固件驱动器自由地移动以配置手术紧固件。在一个这样的实施方式中,致动闭锁系统与动力传动装置的适当的部分相关联,使得触发器的致动使致动闭锁系统从锁定构型移动至解锁构型。例如,触发器可以在第一初始或未致动构型与第二致动构型之间移动,第二致动构型对应于手术紧固件从手术器械配置。在上述系统中,致动闭锁系统构造成在触发器处于第一构型的情况下处于锁定构型。触发器从第一构型朝向第二构型移动使致动闭锁系统从锁定构型移动至解锁构型,使得紧固件驱动器可以移位(例如,以旋转的方式和/或以线性的方式移位)以配置紧固件。
在一些实施方式中,致动闭锁系统包括与触发器相关联的控制表面和与紧固件驱动器相关联的一个或更多个锁定表面。一个或更多个锁定表面与紧固件驱动器操作性地联接,使得阻挡一个或更多个锁定表面的移动而防止紧固件驱动器的移动。锁定表面或者可以直接与紧固件驱动器联接,锁定表面或者可以与动力传动装置的另一零部件联接,这是因为本公开不限于锁定表面定位在其上的特定零部件。无论锁定表面的特定位置如何,当致动闭锁系统处于锁定构型时,控制表面与锁定表面中的至少一个锁定表面的行进路径对准。以这种方式,控制表面阻碍和/或干涉锁定表面的运动以防止紧固件驱动器的关联运动。如上所述,触发器的致动使致动闭锁系统从锁定构型移动至解锁构型。在一个实施方式中,使致动闭锁系统移动至解锁构型包括使控制表面移动成与锁定表面的行进路径不对准,使得控制表面不再干涉和/或阻碍锁定表面的运动。在其他实施方式中,使致动闭锁系统移动至解锁构型包括使锁定表面相对于控制表面移动,或者替代性地,使控制表面和锁定表面两者移动至以下构型:控制表面不阻碍一个或更多个锁定表面的运动。在一个或更多个锁定表面自由移动时,紧固件驱动器能够移位以配置紧固件。
应当理解的是,致动闭锁系统中的控制表面和/或锁定表面可以包括对应表面的任何合适的组合,所述对应表面相互作用以在彼此对准的情况下选择性地阻挡锁定表面的运动。例如,控制表面和/或锁定表面可以包括突出部、肩部、切口、销、沟、槽、唇缘、凸起或任何其他合适形状的任何适当的组合。在一个这样的实施方式中,控制表面和锁定表面包括两个对应的突出部,所述两个对应的突出部对准以使系统移动进入锁定构型,所述两个对应的突出部不对准以使系统移动离开锁定构型。在另一实施方式中,控制表面和锁定表面包括销或类似的突出结构,该销或类似的突出结构定位在能够捕获销的对应的结构中,比如定尺寸、定形状或定向成防止销在特定的方向上移动的沟、槽或孔。移动销使其与对应的结构接合或脱离接合选择性地允许关联的紧固件驱动器的运动。在又一实施方式中,锁定表面是位于紧固件驱动器上的肩部或动力传动装置的其他合适部分。控制表面包括能够选择性地干涉肩部的运动以使致动闭锁系统在锁定构型与解锁构型之间移动的相应的销、肩部、止挡件或任何其他结构。
鉴于上述内容,应当理解的是,本公开并不限于控制表面和锁定表面的任何特定类型或组合。因此,控制表面和锁定表面可以包括可以选择性地彼此对准和/或接合以选择性地阻挡和/或限制紧固件驱动器的运动的结构的任何合适的组合。
根据特定实施方式,控制表面和一个或更多个锁定表面可以在致动闭锁系统在锁定构型与解锁构型之间移动时以任何合适的方式移动成对准或不对准。因此,致动闭锁系统可以包括在触发器被制动时能够使控制表面移动成与一个或更多个锁定表面对准及不对准的任何合适的机构。例如,在一个实施方式中,控制表面直接联接至触发器使得触发器的运动使控制表面移动成与锁定表面对准及不对准。替代性地,控制表面可以不直接联接至触发器。例如,控制表面可以经由以下结构联接至触发器:齿条和小齿轮构型、互补的凸轮表面、一个或更多个齿轮、一个或更多个连杆或能够将触发器的运动转换成控制表面的运动的任何其他结构。在一个这样的实施方式中,控制表面布置在齿轮的表面上,齿轮或者直接联接至触发器,或者借助于一个或更多个中间齿轮联接至触发器。将触发器从第一构型朝向第二构型的致动驱动齿轮的旋转以使控制表面旋转成与一个或更多个锁定表面的行进路径不对准。在另一实施方式中,并且如下面在图中进一步描述的,控制表面布置在第一连杆上,第一连杆操作性地联接至触发器。致动触发器使第一连杆以线性的方式和/或旋转的方式相对于关联的锁定表面移动。
尽管已经描述了涉及用于对致动闭锁系统的锁定表面和控制表面的相对定位进行控制的不同实施方式的几种可能的构型,但是应当理解的是,本文中描述的致动闭锁系统并不限于用于控制锁定表面和控制表面的相对运动的任何特定布置。例如,尽管控制表面已经被描述为移动成与锁定表面不对准,但是在其他实施方式中,锁定表面可以相对于静止的控制表面移动,或者替代性地,控制表面和锁定表面在致动闭锁系统在锁定构型与解锁构型之间移动时可以相对于彼此移动。此外,锁定表面和/或控制表面可以以任何期望的方式相对于彼此移动,所述方式包括但不限于以线性的方式、以旋转的方式、以线性的方式和以旋转的方式的组合以及沿着非线性路径比如举例来说曲线。
还应当注意的是,本文公开的致动闭锁系统的各种实施方式不限于与任何特定类型的紧固件或手术器械一起使用。例如,致动闭锁系统可以与大头钉、夹具、U型钉、销、组织锚固件、骨锚固件、螺旋紧固件、螺钉紧固件和可以受益于用于避免紧固件的不完全和/或无意的配置的致动闭锁系统的使用的任何其他类型的紧固件一起使用。类似地,致动闭锁系统可以在任何数量的医疗过程中使用,该医疗过程包括但不限于将修复织物或网状物附接至下面的组织,附接邻近的组织层,将识别装置和/或标签附接至家畜以及涉及紧固件的配置的其他适当应用。
为了清楚起见,参照附图描述的实施方式涉及腹腔镜紧固器械。然而,本公开并不限于此。相反,致动闭锁系统可以结合在任何致动的手术器械中。例如,致动闭锁系统可以用于内窥镜装置、管道镜装置、导管、在“开放”手术中使用的手术器械、包括致动的工作工具的手术器械或任何其他合适的手术器械中。在手术器械配置紧固件的实施方式中,手术器械可以构造成允许使用者将器械装载一个或更多个紧固件、预先装载一个或更多个紧固件、选择性地与包括一个或更多个预装载紧固件的一次性装载单元连接,或者手术器械可以以任何其他适当的方式构造。
现在转到附图,对致动闭锁系统和手术器械的特定的非限制性实施方式进行更详细的描述。
图1描绘了用于配置一个或更多个手术紧固件的手术器械10。手术器械10包括触发器14和在装置的近端端部处的手柄12。手术器械还包括从手柄向远端方向延伸的外部长轴16。当触发器被致动时,手术紧固件从长轴的远端稍端配置。应当理解的是,经配置的手术紧固件可以配置到任何合适的假体、骨头和/或组织中。例如,在一个实施方式中,手术紧固件可以配置到比如手术网的软组织修复织物中,并且可以配置到下面的组织中,用于修复疝气。
图2描绘了图1的手术器械10的远端端部的分解图。如图中所描绘的,手术器械包括外部长轴16、旋转件18和心轴20。当组装时,心轴布置在旋转件内,旋转件布置在外部长轴内。在所描绘的实施方式中,旋转件是可旋转的驱动管,并且心轴包括用于支承一个或更多个手术紧固件100的螺纹部分22。如图所示,手术紧固件可以是螺旋紧固件,螺旋紧固件具有头部102和螺旋体104,该头部102包括用于接纳螺纹式心轴的通孔。如下面更详细描述的,触发器经由未描绘的动力传递装置联接至旋转件,使得触发器的致动使旋转件相对于心轴旋转。旋转件的旋转使布置在心轴的螺纹部分上的手术紧固件旋转,这使得紧固件沿着远端方向移位并将最远端的紧固件配置到假体和/或组织中。在2013年11月8日提交的申请号为14/075,398、公开号为US2015/0133964的美国申请中提供了这种类型的紧固件配置系统的更详细的描述,出于所有目的将该申请并入本文。
现在参照图3,对一个实施方式的手术器械10的内部的部件进行更详细的描述。如图中所示,手术器械包括触发器14和复位弹簧24,该复位弹簧24附接至触发器和手柄12两者。复位弹簧在触发器处于致动构型时提供回复力以帮助触发器恢复到初始的未致动构型。触发器包括齿26,齿26构造成接合动力传动装置28的对应的齿轮。在所描绘的实施方式中,动力传动装置包括齿轮系和单向齿轮离合器30,齿轮系布置成将触发器的运动转换成旋转件18的旋转运动以配置紧固件,单向齿轮离合器30布置成在致动触发器和随后的释放触发器期间限制旋转件使得旋转件沿单个方向旋转。如下面更详细描述的,手术器械还包括旋转联接件32,该旋转联接件32允许操作者使旋转件选择性地旋转并调整紧固件的位置。手术器械还可以包括致动闭锁系统40,该致动闭锁系统40限制旋转件18的运动直到触发器被致动为止;致动闭锁系统的其他细节在下面参照图4至图9进行描述。
尽管上面描述并描绘了包括多个齿轮的动力传动装置,但是应当理解的是,也可以使用其他机构或构型来将施加至触发器的力传递至旋转件或其他紧固件驱动器。例如,可以使用连杆机构来将触发器的移位转换成紧固件驱动器的相关移位。这种构型可能有益于采用线性移位的紧固件驱动器的实施方式。替代性地,触发器可以经由销接合件、齿条和小齿轮构型或任何其他合适的结构直接地联接至紧固件驱动器。
在一些实施方式中,可能有利的是,将可旋转紧固件驱动器的移动限制于单个旋转方向以有助于确保紧固件的完全配置并且确保避免紧固件在配置之后退出。因此,动力传递装置可以包括仅在单个方向上提供旋转力的单向齿轮离合器机构。在所描绘的实施方式中,齿轮离合器机构30包括肩部,当齿轮离合器在与配置紧固件对应的方向上旋转时肩部与可移动臂接合。偏置元件与臂相关联以有助于臂与肩部接合。当离合器齿轮向后旋转时,例如当触发器从第二(致动)构型移回到第一(未致动)构型时,离合器上的凸轮表面使臂在肩部上偏转,使得臂与肩部不接合从而驱动紧固件驱动器的旋转。在一些实施方式中,动力传动装置还包括棘轮,该棘轮构造成仅允许齿轮系沿着单个方向旋转以进一步有助于避免紧固件的不期望的退出。
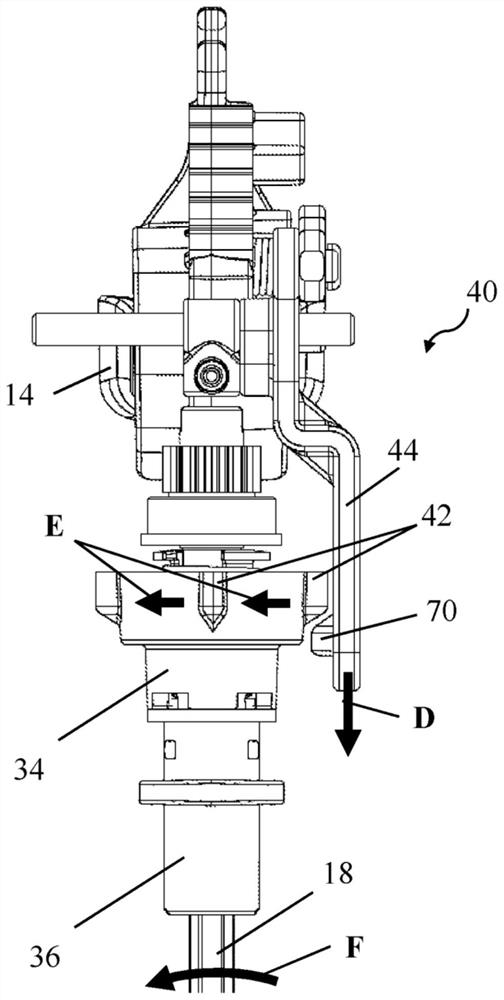
图4是图3的致动闭锁系统40的分解图。为了清楚起见,省略了包括手柄和动力传动装置的手术器械的多个部件。致动闭锁系统包括控制突出部70和多个锁定突出部42。在该实施方式中,控制突出部一体地形成在如下所述的可移动连杆中。此外,锁定突出部布置在旋转联接件32的第一半部34的外表面上,从该外表面向外延伸,并围绕该外表面周向地分布。如下所述,旋转联接件将触发器联接至旋转件18。尽管附图中描绘了并且上文描述了相应的锁定突出部和控制突出部,但是应当理解的是,可以使用控制表面和锁定表面的任何合适的组合,这是因为本公开不限于此。
如在所描绘的实施方式中所示,控制突出部70的位置由联接至触发器14的连杆机构控制。连杆机构包括第一连杆44,控制突出部布置在第一连杆44上。第一连杆包括第一通道56和第二通道60,第一销54接纳在第一通道56中并且轴杆58接纳在第二通道60中。第一销附接至旋转联接件的壳体38,并且轴杆附接至手柄。以这种方式,通道、第一销和轴杆限定了第一连杆的平移路径,这又限定了布置在第一连杆上的控制突出部70的平移路径。在所描绘的实施方式中,第一通道和第二通道布置成使得第一连杆和控制突出部沿着与旋转件的轴向方向大致平行的路径向近端和远端往复运动。但是,应当理解的是,在其他实施方式中,第一连杆和控制突出部可以布置成在横向于旋转件的方向上移位,或者在任何其他合适的方向上移位,这是因为本公开不限于此。
连杆机构还包括第二连杆46,第二连杆46将触发器联接至第一连杆44。第二连杆经由连接至第一连杆的第二销50联接至第一连杆。第二销接纳在长槽52中,长槽52形成在第二连杆的端部中。此外,第二连杆的相反端部经由偏置销接合件直接联接至触发器,偏置销接合件包括第三销48和扭转弹簧66。扭转弹簧具有第一端部68a和第二端部68b,第一端部68a联接至触发器的一部分,第二端部68b由布置在第二连杆上的钩64接纳。因此,扭转弹簧向第二连杆提供旋转偏置,这促使致动闭锁系统从锁定构型移动至解锁构型,如下面更详细描述的。尽管描绘了扭转弹簧,但是应当理解的是,本公开不限于特定类型的偏置元件。在其他实施方式中,可以使用其他偏置元件,比如压缩弹簧、弹性杆或弹性带、弹性臂或能够使第二连杆沿适当方向偏置的任何其他结构。
已经描述了致动闭锁系统40的各种部件,参照图5至图8对各种部件的使用方法进行更详细的描述。图5至图6描绘了处于锁定构型、即触发器14致动之前的致动闭锁系统40。在锁定构型中,由于来自扭转弹簧66的偏置力而引起的第二连杆46的移动受到控制销62的限制从而防止致动闭锁系统在触发器致动之前向解锁构型移动。如图6所示,当致动闭锁系统处于锁定构型时,控制突出部70与锁定突出部42的行进路径对准,以阻止锁定突出部移动。因此,与锁定突出部相关联的旋转件也被限制移动。
图7至图8描绘了处于解锁构型的致动闭锁系统40。触发器14沿着方向A从第一构型(例如,未致动构型)朝向第二构型(例如,紧固件被完全配置的致动构型)的致动引起第二连杆46沿着方向B的相关移位,并且扭转弹簧66提供了沿着方向C绕第三销48的旋转偏置力,以迫压致动闭锁系统朝向解锁构型。具体地,旋转力经由接纳在槽52中的第二销50传递至第一连杆44,并且因此向第一连杆提供线性力,这又引起了第一连杆沿方向D的移位。如图7中所示,第一连杆的平移使控制突出部70移动成与锁定突出部42的行进路径不对准,使得锁定突出部在致动循环的后续部分期间沿着方向E自由移动。因此,旋转件18也如箭头F所示的自由地旋转。
锁定突出部(布置在旋转联接件的第一半部34上)和相关联的旋转件的旋转由动力传动装置(未描绘出)驱动。当触发器例如由于复位弹簧24所提供的偏置力从第二位置朝向第一位置移回时,第一连杆和第二连杆的运动是相反的以使致动闭锁系统移回到锁定构型中。因此,在手术器械的每次致动期间出现初始限制旋转件旋转和随后允许旋转件旋转的过程。
为了确保在制造期间定位在手术器械内的堆叠的手术紧固件的适当定位,可能期望在不需要完全拆卸器械的情况下允许可旋转紧固件驱动器旋转。因此,并且如上所述,在一些实施方式中,手术器械包括旋转联接件,该旋转联接件选择性地允许旋转件18或其他合适的紧固件驱动器的旋转,以沿着心轴20调整紧固件100的位置。例如,图9描绘了旋转连接件32的一个实施方式,旋转连接件32处于联接构型使得来自动力传动装置的旋转力借助于旋转联接件传递至旋转件。在所描绘的实施方式中,旋转联接件包括联接至动力传动装置的第一半部34和联接至旋转件的第二半部36。联接件的第一半部经由键配合(未描绘出)联接至动力传动装置的轴齿轮28a。键配合在联接件的第一半部与轴齿轮之间形成可滑动连接使得联接件可以在轴齿轮上向近端和远端两者滑动。联接件的第一半部和第二半部在接合面74处彼此相互作用。在所描绘的实施方式中,接合面包括互锁特征,比如互锁的锯齿结构。然而,应当理解的是,接合面可以对应于任何数量的接合面,包括但不限于过盈配合、螺母和螺栓连接或能够在联接件的第一半部与第二半部之间传递旋转力并可以选择性地接合和断开接合以将紧固件驱动器与相关联的触发器联接和断开联接的任何其他合适的结构。在所描绘的实施方式中,预压缩弹簧74定位在滚柱轴承76和联接件34的第一半部的相对的两个表面之间。因此,联接件的第一半部沿着远端方向朝向联接件的第二半部偏置,这对应于接合构型。如图10所示,当期望使旋转件与用于使旋转件旋转的触发器断开联接时,使用者使联接件的第一半部沿着向近端定向的方向G移位,以移动接合面72使其脱离接合。然后,将旋转件与触发器断开联接并且旋转件可以沿着方向H自由地旋转,以根据需要调整堆叠的紧固件的位置。联接件的第一半部一旦被适当地定位就被释放。然后,联接件的第一半部在被释放之后通过偏置弹簧向远端移位,以重新接合联接件半部之间的接合面并重新联接旋转件和触发器。
虽然已经结合各种实施方式和示例描述了本教示,但是本教示并不意在局限于这些实施方式或示例。相反,如本领域技术人员将理解的,本教示包含各种替代方案、改型和等同物。因此,上述说明和附图仅作为示例。