车辆用显示系统、车辆系统以及车辆
文献发布时间:2023-06-19 10:40:10
技术领域
本公开涉及车辆用显示系统车辆系统以及车辆。
背景技术
当前,在各国在积极地进行汽车的自动驾驶技术的研究,在各国正在研究用于车辆(以下,“车辆”是指汽车。)能够以自动驾驶模式在公路上行驶的法制整顿。此处,在自动驾驶模式下,车辆系统自动地控制车辆的行驶。具体而言,在自动驾驶模式下,车辆系统基于从相机、雷达(例如,激光雷达、毫米波雷达)等传感器获得的表示车辆的周边环境的信息(周边环境信息)来自动地进行转向控制(车辆的行进方向的控制)、制动控制以及加速控制(车辆的制动、加减速的控制)中的至少一个。另一方面,在以下所述的手动驾驶模式下,与大多以往类型的车辆一样,驾驶员控制车辆的行驶。具体而言,在手动驾驶模式下,按照驾驶员的操作(转向操作、制动操作、加速操作)来控制车辆的行驶,车辆系统不自动地进行转向控制、制动控制以及加速控制。另外,所谓车辆的驾驶模式并不是仅存在于一部分的车辆的概念,而是存在于也包括不具有自动驾驶功能的以往型的车辆的全部车辆的概念,例如,根据车辆控制方法等进行分类。
这样,预计将来在公路上以自动驾驶模式行驶中的车辆(以下,适当地称为“自动驾驶车辆”。)和以手动驾驶模式行驶中的车辆(以下,适当地称为“手动驾驶车”。)混在一起。
作为自动驾驶技术的一个例子,在专利文献1中公开了后方车辆自动跟随前行车辆行驶的自动跟随行驶系统。在该自动跟随行驶系统中,前行车辆和后方车辆分别具备照明系统,在前行车辆的照明系统中显示用于防止其它车辆插入到前行车辆与后方车辆之间的文字信息,并且在后方车辆的照明系统中显示表示是自动跟随行驶的意思的文字信息。
先行技术文献
专利文献
专利文献1:日本特开平9-277887号公报
预计在将来的自动驾驶社会中,自动驾驶车辆与人间之间的视觉交流变得重要。特别是,预计车辆与存在于该车辆的外部的行人等对象物之间的视觉交流以及车辆与该车辆的乘客之间的视觉交流越发重要。在这一点上,能够使用向路面上出射光图案的路面描绘装置来实现车辆与对象物之间的视觉交流,并能够使用平视显示器(HUD)来实现车辆与乘客之间的视觉交流。
然而,通常车辆用显示系统的显示控制部(车载计算机)自动地控制光图案的出射,但根据车辆的周边环境的状况,有时乘客自身想要手动控制光图案的出射。例如假定:在光图案没有向路面上出射的状况下,乘客想要朝向存在于车辆的周边的特定的行人出射光图案的情况等。这样,从光图案的出射的手动控制的观点来看,有进一步改善车辆用显示系统的余地。
另外,在搭载了路面描绘装置以及HUD的车辆中,在路面描绘装置以及HUD中的至少一方产生异常的情况下,不能够继续车辆与乘客之间的视觉交流。这样,对于即使在路面描绘装置以及HUD中的至少一方产生异常的情况下也能够继续车辆与乘客之间的视觉交流的车辆用显示系统,有研究的余地。
并且,为了进一步提高车辆与人间之间的视觉交流的可靠性,也存在不少想要使路面描绘装置和HUD的动作进一步高速化这样的期望。这样,从路面描绘装置和HUD的动作的高速化的观点来看,有进一步改善车辆系统的余地。
发明内容
本公开的第一目的在于提供乘客手动控制光图案的情况下的可用性提高的车辆用显示系统以及车辆。
本公开的第二目的在于提供即使在车辆用显示系统产生异常的情况下也能够继续车辆与乘客之间的视觉交流的车辆用显示系统以及车辆。
本公开的第三目的在于提供能够使HUD和路面描绘装置的动作高速化的车辆系统以及车辆。
本公开的一个方式的车辆用显示系统被设置与车辆,具备:
第一显示装置,构成为朝向上述车辆的外部的路面出射光图案;
第二显示装置,构成为位于上述车辆的内部,并且以将规定的信息与上述车辆的外部的现实空间叠加的方式向上述车辆的乘客显示上述规定的信息;以及
显示控制部,构成为控制上述第一显示装置,
上述显示控制部构成为根据上述乘客对能够显示上述规定的信息的显示区域的输入操作来控制上述光图案的出射。
根据上述结构,根据乘客对显示区域的输入操作来控制光图案的出射。这样,乘客能够通过直观的输入操作来控制光图案的出射。因此,能够提供乘客手动控制光图案的情况下的可用性提高的车辆用显示系统。
另外,上述显示控制部也可以构成为基于上述乘客的视点的位置和上述输入操作的输入位置来控制上述光图案的出射位置。
根据上述结构,基于乘客的视点的位置和乘客的输入操作的输入位置来控制光图案的出射位置。这样,乘客能够通过直观的输入操作来决定光图案的出射位置。因此,能够提供乘客手动控制光图案的情况下的可用性提高的车辆用显示系统。
另外,上述显示控制部可以构成为根据对上述显示区域的上述输入操作来开始上述光图案的出射。
根据上述结构,根据对显示区域的输入操作来开始光图案的出射。这样,能够通过乘客的直观的输入操作向存在于车辆的外部的对象物(例如,行人等)出射光图案。
另外,上述显示控制部可以构成为:
基于上述乘客的视点的位置和上述输入操作的第一输入位置来确定上述路面上的上述光图案的开始位置,
基于上述视点的位置和上述输入操作的第二输入位置来确定上述路面上的上述光图案的结束位置,
基于上述开始位置和上述结束位置,将上述光图案向上述路面上出射。
根据上述结构,基于乘客的视点的位置和输入操作的第一输入位置来确定光图案的开始位置,并基于乘客的视点和输入操作的第二输入位置来确定光图案的结束位置。并且,基于光图案的开始位置和结束位置向路面上出射光图案。这样,能够通过乘客的直观的输入操作向车辆的外部的对象物出射光图案。
另外,上述显示控制部可以构成为根据对上述显示区域的上述输入操作来变更上述光图案的出射位置。
根据上述结构,根据对显示区域的输入操作来变更光图案的出射位置。这样,能够通过乘客的直观的输入操作来变更光图案的出射位置。
另外,上述显示控制部可以构成为:
基于上述乘客的视点的位置和上述输入操作的第三输入位置来确定上述路面上的第一指定位置,
在上述第一指定位置与出射到上述路面上的光图案重叠的情况下,基于上述视点的位置和上述输入操作的第四输入位置来确定上述路面上的第二指定位置,
基于上述第二指定位置来变更上述光图案的出射位置。
根据上述结构,在第一指定位置与光图案的出射位置重叠的情况下,将光图案的出射位置变更为第二指定位置。这样,能够通过乘客的直观的输入操作来变更光图案的出射位置。
另外,上述显示区域可以具有触摸面板,上述触摸面板构成为接受上述输入操作。
根据上述结构,根据乘客对触摸面板的输入操作来控制光图案的出射。这样,能够通过乘客的直观的输入操作来控制光图案的出射。
另外,上述车辆用显示系统还可以具备跟踪相机,上述跟踪相机构成为位于上述车辆的内部,并且获取表示上述乘客的图像数据,
上述显示控制部构成为:
基于上述图像数据来确定上述乘客的视点的位置以及上述乘客的手的位置,
基于上述手的位置来确定上述输入操作的输入位置,
基于上述视点的位置和上述输入操作的输入位置来控制上述光图案的出射位置。
根据上述结构,基于通过跟踪相机获取到的图像数据来确定乘客的视点的位置和乘客的手的位置,在此基础上基于乘客的手的位置来确定乘客的输入操作的输入位置。并且,基于乘客的视点的位置和输入操作的输入位置来控制光图案的出射位置。这样,能够通过(不使用触摸面板)空间中的手的动作来控制光图案的出射位置。因此,能够提供乘客手动控制光图案的情况下的可用性提高的车辆用显示系统。
本公开的一个方式所涉及的车辆用显示系统是设置于车辆的车辆用显示系统,具备:
第一显示装置,构成为朝向上述车辆的外部的路面出射光图案;
第二显示装置,构成为位于上述车辆的内部,并且以与上述车辆的行驶相关的车辆行驶信息和上述车辆的外部的现实空间叠加的方式朝向上述车辆的乘客显示上述车辆行驶信息;以及
显示控制部,构成为控制上述第一显示装置以及上述第二显示装置,
在判断为在上述第一显示装置有异常的情况下,上述显示控制部使上述第二显示装置显示与上述光图案对应的信息。
根据上述结构,在判断为在第一显示装置有异常的情况下,使第二显示装置显示与光图案对应的信息。这样,能够提供即使在第一显示装置产生异常的情况下也能够进行车辆与乘客之间的视觉交流的车辆用显示系统。
另外,在判断为在第一显示装置有异常的情况下,上述显示控制部可以在上述第一显示装置出射多个上述光图案时,使上述第二显示装置显示与上述多个光图案分别对应的信息。
根据上述结构,使第二显示装置显示与所有光图案对应的信息。这样,即使在第一显示装置产生异常的情况下,乘客也能够连续不断地掌握与异常前相同的信息。
另外,上述显示控制部可以使上述第二显示装置显示上述第一显示装置的异常信息。
根据上述结构,使第二显示装置显示第一显示装置是异常的信息。这样,乘客能够掌握第一显示装置是异常的。
另外,在判断为在上述第二显示装置有异常的情况下,上述显示控制部使上述第一显示装置出射与上述车辆行驶信息对应的光图案。
根据上述结构,在判断为在第二显示装置有异常的情况下,使第一显示装置出射与车辆行驶信息对应的光图案。这样,能够提供即使在第二显示装置产生异常的情况下也能够进行车辆与乘客之间的视觉交流的车辆用显示系统。
本公开的其它方式所涉及的车辆用显示系统是设置于车辆的车辆用显示系统,具备:
第一显示装置,构成为朝向上述车辆的外部的路面出射光图案;
第二显示装置,构成为位于上述车辆的内部,并且以上述车辆的行驶有关的车辆行驶信息与上述车辆的外部的现实空间叠加的方式向上述车辆的乘客显示上述车辆行驶信息;以及
显示控制部,构成为控制上述第一显示装置以及上述第二显示装置,
在判断为在上述第二显示装置有异常的情况下,上述显示控制部使上述第一显示装置出射与上述车辆行驶信息对应的光图案。
根据上述结构,在判断为在第二显示装置有异常的情况下,使第一显示装置出射与车辆行驶信息对应的光图案。这样,能够提供即使在第二显示装置产生异常的情况下也能够进行车辆与乘客之间的视觉交流的车辆用显示系统。
另外,在判断为在第二显示装置有异常的情况下,上述显示控制部可以在上述第二显示装置显示多个上述车辆行驶信息时,使上述第一显示装置出射与多个上述车辆行驶信息的至少一个车辆行驶信息对应的光图案。
根据上述结构,使第一显示装置出射与多个车辆行驶信息中的至少一个信息对应的光图案。例如,能够使第一显示装置出射多个车辆行驶信息中的、与由能够容易从光图案读取的图形的信息、简单的文字的信息构成的车辆行驶信息对应的光图案。这样,即使在第二显示装置产生异常的情况下,乘客也能够连续不断且正确地掌握与异常前几乎相同的信息。
另外,可以提供具备上述车辆用显示系统的车辆。
根据上述结构,能够提供即使在车辆用显示系统产生异常的情况下也能够继续车辆与乘客之间的视觉交流的车辆用显示系统。
本公开的一个方式的车辆系统被设置于车辆,具备构成为控制上述车辆的行驶的车辆控制部和车辆用显示系统。
上述车辆用显示系统具备:
平视显示器(HUD),构成为位于上述车辆的内部,并且以规定的信息与上述车辆的外部的现实空间叠加的方式向上述车辆的乘客显示上述规定的信息;
路面描绘装置,构成为朝向上述车辆的外部的路面出射光图案;以及
显示控制部,构成为决定是否应使上述路面描绘装置以及上述HUD进行动作,并控制上述路面描绘装置以及上述HUD的动作。
根据上述结构,代替车辆控制部,决定显示控制部是否应使路面描绘装置以及HUD进行动作,并且控制路面描绘装置以及HUD的动作。这样,能够减少车辆控制部的运算负荷,并可以使路面描绘装置以及HUD的动作高速化。
另外,上述显示控制部可以具有:
第一电子控制单元,构成为具备第一处理器和第一存储器,并控制上述HUD的动作;以及
第二电子控制单元,具备第二处理器和第二存储器。
在上述HUD未进行动作的情况下,上述第二电子控制单元可以控制上述路面描绘装置的动作。
在上述HUD进行动作的情况下,上述第一电子控制单元可以控制上述HUD以及上述路面描绘装置的动作。
根据上述结构,在HUD未进行动作的情况下,第二电子控制单元控制路面描绘装置的动作,另一方面,在HUD进行动作的情况下,第一电子控制单元控制HUD以及路面描绘装置的动作。这样,在HUD和路面描绘装置这两方进行动作的情况下,可以使HUD和路面描绘装置中的至少一方高效且高速地动作。特别是,在HUD和路面描绘装置相互协调进行动作的情况下(换言之,在根据HUD和路面描绘装置中的一方的动作内容来决定另一方的动作内容的情况下),第一电子控制单元不仅生成用于控制HUD的动作的控制信号,还生成用于控制路面描绘装置的动作的控制信号。因此,能够考虑到HUD的动作内容,并使路面描绘装置高效且高速地进行动作。或者,能够考虑到路面描绘装置的动作内容,并使HUD高效且高速地进行动作。
另外,上述车辆用显示系统还可以具备照明装置,上述照明装置构成为向上述车辆的外部出射近光束以及/或者远光束。
在上述HUD未进行动作的情况下,上述第二电子控制单元可以控制上述路面描绘装置以及上述照明装置的动作。
在上述HUD进行动作的情况下,上述第一电子控制单元可以控制上述HUD以及上述路面描绘装置的动作,而上述第二电子控制单元控制上述照明装置的动作。
根据上述结构,在HUD未进行动作的情况下,第二电子控制单元控制路面描绘装置以及照明装置的动作,而在HUD进行动作的情况下,第一电子控制单元控制HUD以及路面描绘装置这两方的动作。这样,在HUD和路面描绘装置这两方进行动作的情况下,能够使HUD和路面描绘装置中的至少一方高效且高速地进行动作。
另外,上述车辆用显示系统还可以具备照明装置,上述照明装置构成为朝向上述车辆的外部出射近光束以及/或者远光束。
在上述HUD未进行动作的情况下,上述第二电子控制单元可以控制上述路面描绘装置以及上述照明装置的动作。
在上述HUD进行动作的情况下,上述第一电子控制单元可以控制上述HUD、上述路面描绘装置以及上述照明装置的动作。
根据上述结构,在HUD未进行动作的情况下,第二电子控制单元控制路面描绘装置以及照明装置的动作,而在HUD进行动作的情况下,第一电子控制单元控制HUD、路面描绘装置以及照明装置的全部的动作。这样,在HUD、路面描绘装置、照明装置全部进行动作的情况下,能够使HUD、路面描绘装置以及照明装置中的至少一方高效且高速进行动作。特别是,在HUD、路面描绘装置以及照明装置相互协调进行动作的情况下,第一电子控制单元不仅生成用于控制HUD的动作的控制信号,还生成用于控制路面描绘装置的动作的控制信号以及用于控制照明装置的动作的控制信号。因此,能够在考虑HUD的动作内容的基础上,使路面描绘装置以及照明装置高效且高速进行动作。或者,能够考虑路面描绘装置和照明装置的动作内容,并使HUD高效且高速地进行动作。
另外,提供具备上述车辆系统的车辆。
根据上述,能够提供可以使HUD和路面描绘装置的动作高速化的车辆。
发明效果
根据本公开,可以提供乘客手动控制光图案的情况下的可用性提高的车辆用显示系统以及车辆。
并且,根据本公开,可以提供即使在车辆用显示系统产生异常的情况下也能够继续车辆与乘客之间的视觉交流的车辆用显示系统以及车辆。
此外,可以提供能够使HUD和路面描绘装置的动作高速化的车辆系统以及车辆。
附图说明
图1是搭载了本发明的第一实施方式所涉及的车辆系统的车辆的主视图。
图2是第一实施方式所涉及的车辆系统的框图。
图3是分别表示车辆的乘客、配置在仪表板上的HUD(Head-Up Display,平视显示器)以及跟踪乘客的视点的内部相机的图。
图4是用于对第一实施方式的显示系统的第一动作例进行说明的流程图。
图5是表示车辆与存在于车辆的周边的行人的图。
图6是用于对基于乘客的视点的位置和触摸位置来确定光图案的开始位置的方法进行说明的图。
图7是表示通过滑动操作指定HUD显示区域上的两个输入位置的样子的图。
图8是表示基于通过滑动操作所指定的两个输入位置将光图案向路面上出射的样子的图。
图9是表示从车辆朝向行人出射的光图案的图。
图10是用于对第一实施方式的显示系统的第二动作例进行说明的流程图。
图11是表示从车辆出射的光图案的图。
图12是表示在乘客的视野中通过乘客的输入操作所指定的第一指定位置和光图案重叠的样子的图。
图13是表示通过乘客对HUD显示区域的滑动操作来变更光图案的出射位置的样子的图。
图14是表示变更从车辆出射的光图案的出射位置的样子的图。
图15是用于对基于通过内部相机获取到的图像数据来确定输入操作的输入位置的方法进行说明的图。
图16是本发明的第二实施方式所涉及的车辆系统的框图。
图17是用于对第二实施方式所涉及的显示控制部的显示控制的一个例子进行说明的流程图。
图18A是用于对第二实施方式所涉及的路面描绘显示的一个例子进行说明的图。
图18B是用于对第二实施方式所涉及的HUD显示的一个例子进行说明的图。
图19是用于对第二实施方式所涉及的路面描绘显示异常时的HUD显示的一个例子进行说明的图。
图20A是用于对第二实施方式所涉及的HUD显示的一个例子进行说明的图。
图20B是用于对第二实施方式所涉及的路面描绘显示的一个例子进行说明的图。
图21是用于对第二实施方式所涉及的HUD显示异常时的路面描绘显示的一个例子进行说明的图。
图22是用于对本发明的第三实施方式所涉及的显示控制部的显示控制的一个例子进行说明的流程图。
图23是用于对第二实施方式所涉及的显示控制部的显示控制的变形例进行说明的流程图。
图24是用于对第三实施方式所涉及的显示控制部的显示控制的变形例进行说明的流程图。
图25是搭载了本发明的第四实施方式所涉及的车辆系统的车辆的主视图。
图26是第四实施方式所涉及的车辆系统的框图。
图27是表示从HUD出射的光到达乘客的眼睛的样子的图。
图28是用于对第四实施方式的显示系统的动作例进行说明的流程图。
图29是表示车辆朝向存在于车辆的周边的行人出射光图案的样子的图。
图30是表示显示于HUD显示区域的HUD信息的一个例子的图。
具体实施方式
(第一实施方式)
以下,参照附图,并对本发明的第一实施方式(以下,称为本实施方式。)进行说明。为了便于说明,本附图所示的各构件的大小有时与实际的各构件的大小不同。
此外,在本实施方式的说明中,为了便于说明,适当提及“左右方向”、“上下方向”、“前后方向”。这些方向是对于图1所示的车辆1设定的相对方向。此处,“左右方向”是包括“左方向”及“右方向”的方向。“上下方向”是包括“上方向”及“下方向”的方向。“前后方向”是包括“前方向”及“后方向”的方向。在图1中未示出前后方向,但其是与左右方向及上下方向正交的方向。
首先,以下,参照图1以及图2,对本实施方式所涉及的车辆系统2进行说明。图1是搭载了车辆系统2的车辆1的主视图。图2是车辆系统2的框图。车辆1是能够以自动驾驶模式行驶的车辆(汽车)。
如图2所示,车辆系统2具备车辆控制部3、车辆用显示系统4(以下,仅称为“显示系统4”。)、传感器5、相机6以及雷达7。并且,车辆系统2具备HMI(Human Machine Interface:人机接口)8、GPS(Global Positioning System:全球定位系统)9、无线通信部10、存储装置11、转向促动器(actuator)12、转向装置13、制动促动器14、制动装置15、加速促动器16以及加速装置17。
车辆控制部3构成为控制车辆1的行驶。车辆控制部3例如由至少一个电子控制单元(ECU:Electronic Control Unit)构成。电子控制单元包括:包括一个以上的处理器和一个以上的存储器的计算机系统(例如,SoC(System on a Chip:片上系统)等)、以及由晶体管等有源元件及无源元件构成的电子电路。处理器例如包括CPU(Central ProcessingUnit:中央处理器)、MPU(Micro Processing Unit:微处理器)、GPU(Graphics ProcessingUnit:图形处理器)和TPU(Tensor Processing Unit:张量处理器)中的至少一个。CPU也可以由多个CPU核心构成。GPU也可以由多个GPU核心构成。存储器包括ROM(Read OnlyMemory:只读存储器)和RAM(Random Access Memory:随机存取存储器)。在ROM中也可以存储车辆控制程序。例如,车辆控制程序也可以包括自动驾驶用的人工智能(AI)程序。AI程序是由使用了多层神经网络的有监督或无监督的机械学习(特别是,深度学习)构建的程序(学习完毕模型)。在RAM中也可以暂时地存储车辆控制程序、车辆控制数据和/或表示车辆的周边环境的周边环境信息。处理器也可以构成为从ROM中存储的各种车辆控制程序中将指定的程序展开至RAM,在与RAM的协动中执行各种处理。此外,计算机系统也可以由ASIC(Application Specific Integrated Circuit:专用集成电路)、FPGA(Field-ProgramableGate Array:现场可编程门阵列)等的非冯诺依曼型计算机构成。而且,计算机系统也可以通过冯诺依曼型计算机和非冯诺依曼型计算机的组合而构成。
显示系统4具备左侧前大灯20L、右侧前大灯20R、左侧路面描绘装置45L以及右侧路面描绘装置45R。并且,显示系统4具备HUD(Head-Up Display)42和显示控制部43。
如图1所示,左侧前大灯20L被配置在车辆1的左侧前面,并具备构成为将近光束(low beam,近距离光束)向车辆1的前方照射的近光灯和构成为将远光束(high beam,远距离光束)向车辆1的前方照射的远光灯。右侧前大灯20R被配置在车辆1的右侧前面,并具备构成为将近光束向车辆1的前方照射的近光灯和构成为将远光束向车辆1的前方照射的远光灯。近光灯和远光灯分别具有LED(Light Emitting Diode:发光二极管)、LD(LaserDiode:激光二极管)等一个以上的发光元件、透镜以及反射器等光学部件。另外,以下,为了便于说明,有时将左侧前大灯20L以及右侧前大灯20R仅统称为前大灯20。
左侧路面描绘装置45L(第一显示装置的一个例子)被配置在左侧前大灯20L的灯室内。左侧路面描绘装置45L构成为朝向车辆1的外部的路面出射光图案(pattern)。左侧路面描绘装置45L例如具有光源部、驱动反射镜、透镜、反射镜等光学系统、光源驱动电路以及反射镜驱动电路。光源部是激光源或者LED光源。例如,激光源是构成为分别出射红色激光、绿色激光以及蓝色激光的RGB激光源。驱动反射镜例如是MEMS(Micro Electro MechanicalSystems:微机电系统)反射镜、DMD(Digital Mirror Device:数字微镜器件)、电流镜、多面镜等。光源驱动电路构成为对光源部进行驱动控制。光源驱动电路构成为基于从显示控制部43发送的规定的光图案相关的信号来生成用于控制光源部的动作的控制信号,在此基础上将该生成的控制信号发送至光源部。反射镜驱动电路构成为对驱动反射镜进行驱动控制。反射镜驱动电路构成为基于从显示控制部43发送的规定的光图案相关的信号来生成用于控制驱动反射镜的动作的控制信号,在此基础上将该生成的控制信号发送至驱动反射镜。在光源部为RGB激光源的情况下,左侧路面描绘装置45L可以通过对激光进行扫描而在路面上描绘各种颜色的光图案。例如,光图案也可以是表示车辆1的行进方向的箭头形状的光图案。
右侧路面描绘装置45R(第一显示装置的一个例子)被配置在右侧前大灯20R的灯室内。右侧路面描绘装置45R构成为向车辆1的外部的路面出射光图案。与左侧路面描绘装置45L同样地,右侧路面描绘装置45R具有光源部、驱动反射镜、透镜等光学系统、光源驱动电路以及反射镜驱动电路。
另外,左侧路面描绘装置45L以及右侧路面描绘装置45R的描绘方式也可以是光栅扫描方式、DLP(Digital Light Processing:数字光处理)方式或者LCOS(Liquid Crystalon Silicon:硅基液晶)方式。在采用DLP方式或者LCOS方式的情况下,光源部可以是LED光源。另外,作为左侧路面描绘装置45L以及右侧路面描绘装置45R的描绘方式,也可以采用投影方式。在采用投影方式的情况下,光源部可以是排列成矩阵状的多个LED光源。并且,在本实施方式中,左侧路面描绘装置45L以及右侧路面描绘装置45R也可以配置在车顶100A上。在这一点上,也可以将一个路面描绘装置配置在车顶100A上。以下,为了便于说明,有时将左侧路面描绘装置45L以及右侧路面描绘装置45R仅统称为路面描绘装置45。另外,在以下的说明中,设定路面描绘装置45表示左侧路面描绘装置45L、右侧路面描绘装置45R或者左侧路面描绘装置45L和右侧路面描绘装置45R的组合。
HUD42(第二显示装置的一个例子)位于车辆1的内部。具体而言,HUD42被设置在车辆1的室内的规定位置。例如,如图3所示,HUD42也可以配置在车辆1的仪表板上。HUD42作为车辆1与乘客H之间的视觉界面发挥功能。HUD42构成为以规定的信息(以下,称为HUD信息。)与车辆1的外部的现实空间(特别是,车辆1的前方的周边环境)叠加的方式向乘客H显示该HUD信息。这样,HUD42作为AR(Augmented Reality:增强现实)显示器发挥功能。通过HUD42显示的HUD信息例如是与车辆1的行驶相关的车辆行驶信息以及/或者与车辆1的周边环境相关的周边环境信息(特别是,与存在于车辆1的外部的对象物相关的信息)。
如图3所示,HUD42具有HUD主体部420和透明屏幕421。HUD主体部420具有光源部、驱动反射镜、光学系统、光源驱动电路以及反射镜驱动电路。光源部例如是激光源或者LED光源。激光源例如是构成为分别出射红色激光、绿光激光以及蓝色激光的RGB激光源。驱动反射镜例如是MEMS反射镜、DMD、电流镜、多面镜等。光学系统包括棱镜、透镜、扩散板、放大镜中的至少一个。光源驱动电路构成为控制光源部。光源驱动电路构成为基于从显示控制部43发送的图像数据生成用于控制光源部的动作的控制信号,在此基础上将该生成的控制信号发送至光源部。反射镜驱动电路构成为对驱动反射镜进行驱动控制。反射镜驱动电路构成为基于从显示控制部43发送的图像数据,生成用于控制驱动反射镜的动作的控制信号,在此基础上将该生成的控制信号发送至驱动反射镜。
透明屏幕421是透明的合成器(combiner)(透明的板状部件)。透明屏幕421具有能够显示HUD信息的HUD显示区域D1(参照图6、7等)。从HUD主体部420出射的光(图像)照射到透明屏幕421的HUD显示区域D1。接下来,HUD显示区域D1使从HUD主体部420出射的光朝向乘客H的视点E反射。其结果,乘客H将从HUD主体部420出射的光(图像)识别为形成在透明屏幕421的前方的规定的位置的虚像。这样,使通过HUD42显示的HUD信息(图像)与车辆1的前方的现实空间叠加的结果是乘客E能够感觉到该HUD信息漂浮在道路上。
另外,透明屏幕421具有构成为接受乘客H的输入操作的触摸面板。特别是,在透明屏幕421的HUD显示区域D1设置触摸面板。通过乘客H用手指触摸HUD显示区域D1,从而从透明屏幕421(特别是,触摸面板)生成与乘客H的输入操作对应的规定的操作信号,在此基础上将该操作信号发送至显示控制部43。这样,显示控制部43构成为根据乘客H对触摸面板的输入操作来执行规定的处理。
另外,在本实施方式中,透明屏幕421可以由前窗60的一部分构成。即使在该情况下,前窗60的一部分具有HUD显示区域D1。并且,乘客H将从HUD主体部420出射的光(图像)识别为形成在前窗60的前方的规定的位置的虚像。
另外,形成虚像的位置(虚像形成位置)可以通过调整HUD42的光学系统的位置(特别是,投影光学系统的焦距)而可变。在这一点上,显示控制部43能够基于存在于车辆1的前方的对象物的位置信息来控制HUD42,以使得对象物的位置和虚像形成位置大致一致。另外,HUD42的描绘方式可以是光栅扫描方向、DLP方式或者LCOS方式。在采用DLP方式或者LCOS方式的情况下,HUD42的光源部也可以是LED光源。
显示控制部43构成为控制路面描绘装置45(具体而言,左侧路面描绘装置45L和右侧路面描绘装置45R)、前大灯20(具体而言,左侧前大灯20L和右侧前大灯20R)以及HUD42的动作。在这一点上,显示控制部43构成为控制路面描绘装置45(具体而言,左侧路面描绘装置45L和右侧路面描绘装置45R)的动作,以向路面上的规定的位置照射光图案。特别是,显示控制部43构成为根据乘客H对HUD显示区域D1(触摸面板)的输入操作来控制光图案的出射。并且,显示控制部43构成为控制HUD42的动作,以将HUD信息显示于HUD显示区域D1。
显示控制部43由电子控制单元(ECU)构成。电子控制单元包括:包括一个以上的处理器和一个以上的存储器的计算机系统(例如,SoC等)、和由晶体管等有源元件以及无源元件构成的电子电路。处理器包括CPU、MPU、GPU以及TPU中的至少一个。存储器包括ROM和RAM。另外,计算机系统也可以由ASIC、FPGA等非冯诺依曼型计算机构成。
在本实施方式中,车辆控制部3和显示控制部43设为独立的结构,但车辆控制部3和显示控制部43也可以一体地构成。在这一点上,显示控制部43和车辆控制部3也可以由单一的电子控制单元构成。另外,显示控制部43可以包括:构成为控制前大灯20和路面描绘装置45的动作的电子控制单元、和构成为控制HUD42的动作的电子控制单元这两个电子控制单元。
传感器5包括加速度传感器、速度传感器以及陀螺仪传感器中的至少一个。传感器5构成为检测车辆1的行驶状态,并将行驶状态信息输出至车辆控制部3。传感器5也可以还具备:检测驾驶员是否坐在驾驶席的落座传感器、检测驾驶员的面部的方向的面部朝向传感器、检测外部天气状态的外部天气传感器、以及检测车内是否有人的人体感应传感器等。
相机6例如是包括CCD(Charge-Coupled Device:电荷耦合器件)和CMOS(互补型MOS)等摄像元件的相机。相机6包括一个以上的外部相机6A和内部相机6B。外部相机6A构成为在获取了表示车辆1的周边环境的图像数据的基础上,将该图像数据发送到车辆控制部3。车辆控制部3基于发送的图像数据,获取周边环境信息。此处,周边环境信息也可以包括与存在于车辆1的外部的对象物(行人、其它车辆、标志等)有关的信息。例如,周边环境信息也可以包括与存在于车辆1的外部的对象物的属性有关的信息、与对象物相对车辆1的距离或位置有关的信息。外部相机6A可以构成为单眼相机,或可以构成为立体相机。
内部相机6B被配置在车辆1的内部,并构成为获取表示乘客H的图像数据。内部相机6B可以配置在车辆1的顶棚的规定的位置(参照图3),也可以配置在仪表板上。内部相机6B作为跟踪乘客H的视点E的跟踪相机发挥功能。此处,乘客H的视点E可以是乘客H的左眼的视点或者右眼的视点的任意一个。或者,视点E也可以被规定为连结左眼的视点和右眼的视点的线段的中点。显示控制部43可以基于由内部相机6B获取的图像数据来确定乘客H的视点E的位置。对于乘客H的视点E的位置,可以基于图像数据以规定的周期更新,也可以在车辆1的起动时一次决定。
雷达7包括毫米波雷达、微波雷达以及激光雷达(例如,LiDAR单元)中的至少一个。例如,LiDAR单元构成为检测车辆1的周边环境。特别是,LiDAR单元构成为获取表示车辆1的周边环境的3D映射数据(点群数据),然后将该3D映射数据发送至车辆控制部3。车辆控制部3基于发送的3D映射数据来确定周边环境信息。
HMI8由接受来自驾驶员的输入操作的输入部、以及向驾驶员输出行驶信息等的输出部构成。输入部包括切换方向盘、加速器踏板、制动踏板、车辆1的驾驶模式的驾驶模式切换开关等。输出部是显示各种行驶信息的显示器(除了HUD)。GPS9构成为获取车辆1的当前位置信息,并将该获取到的当前位置信息输出至车辆控制部3。
无线通信部10构成为从其它车接收有关在车辆1的周围的其它车的信息(例如,行驶信息等),并且将有关车辆1的信息(例如,行驶信息等)发送到其它车(车车间通信)。此外,无线通信单元10从信号灯、标志灯等基础设施接收基础设施信息,并且将车辆1的行驶信息发送到基础设施设备(路车间通信)。此外,无线通信单元10构成为从行人携带的携带型电子设备(智能手机、平板电脑、可穿戴设备等)接收有关行人的信息,并且将车辆1的本车行驶信息发送至携带型电子设备(行人车辆间通信)。车辆1可以通过点对点模式(Adhocmode)与其它车辆、基础设施设备或携带型电子设备直接通信,也可以经由访问点进行通信。而且,车辆1也可以经由未图示的通信网络与其它车辆、基础设施设备或携带型电子设备进行通信。这里,通信网络包括因特网、局域网(LAN)、广域网(WAN)及无线访问网(RAN)中的至少一个。无线通信标准例如是Wi-Fi(注册商标)、Bluetooth(注册商标)、ZigBee(注册商标)、LPWA、DSRC(注册商标)或Li-Fi。此外,车辆1也可以使用第5代移动通信系统(5G)与其它车辆、基础设施设备或携带型电子设备进行通信。
存储装置11是硬盘驱动器(HDD)、SSD(Solid State Drive:固态驱动器)等外部存储装置。可以在存储装置11中存储二维或者三维的地图信息以及/或者车辆控制程序。例如,三维的地图信息可以由3D映射数据(点群数据)构成。存储装置11构成为根据来自车辆控制部3的请求将地图信息、车辆控制程序输出至车辆控制部3。也可以经由无线通信部10和通信网络来更新地图信息、车辆控制程序。
在车辆1以自动驾驶模式行驶的情况下,车辆控制部3基于行驶状态信息、周边环境信息、当前位置信息、地图信息等自动地生成转向控制信号、加速控制信号以及制动控制信号中的至少一个。转向促动器12构成为从车辆控制部3接收转向控制信号,并基于接收到的转向控制信号来控制转向装置13。制动促动器14构成为从车辆控制部3接收制动控制信号,并基于接收到的制动控制信号来控制制动装置15。加速促动器16构成为从车辆控制部3接收加速控制信号,并基于接收到的加速控制信号来控制加速装置17。这样,车辆控制部3基于行驶状态信息、周边环境信息、当前位置信息、地图信息等自动地控制车辆1的行驶。换句话说,在自动驾驶模式下,通过车辆系统2自动控制车辆1的行驶。
另一方面,在车辆1以手动驾驶模式行驶的情况下,车辆控制部3按照驾驶员对加速器踏板、制动踏板以及方向盘的手动操作,来生成转向控制信号、加速控制信号以及制动控制信号。这样,在手动驾驶模式下,由于通过驾驶员的手动操作来生成转向控制信号、加速控制信号以及制动控制信号,所以由驾驶员控制车辆1的行驶。
接下来,对车辆1的驾驶模式进行说明。驾驶模式由自动驾驶模式和手动驾驶模式构成。自动驾驶模式由完全自动驾驶模式、高度驾驶辅助模式以及驾驶辅助模式构成。在完全自动驾驶模式下,车辆系统2自动地进行转向控制、制动控制以及加速控制的全部的行驶控制,并且,驾驶员不处于能够驾驶车辆1的状态。在高度驾驶辅助模式下,车辆系统2自动地进行转向控制、制动控制以及加速控制全部的行驶控制,并且,虽然驾驶员处于能够驾驶车辆1的状态,但不驾驶车辆1。在驾驶辅助模式下,车辆系统2自动地进行转向控制、制动控制以及加速控制中的一部分的行驶控制,并且在车辆系统2的驾驶辅助下,驾驶员驾驶车辆1。另一方面,在手动驾驶模式下,车辆系统2不自动地进行行驶控制,并且,驾驶员在没有车辆系统2的驾驶辅助的情况下驾驶车辆1。
另外,可以通过操作驾驶模式切换开关来切换车辆1的驾驶模式。该情况下,车辆控制部3根据驾驶员对驾驶模式切换开关的操作,在四个驾驶模式(完全自动驾驶模式、高度驾驶辅助模式、驾驶辅助模式、手动驾驶模式)之间切换车辆1的驾驶模式。另外,可以基于自动驾驶车辆能够行驶的可行驶区间、禁止自动驾驶车辆的行驶的行驶禁止区间的信息或者外部天气状态的信息自动地切换车辆1的驾驶模式。该情况下,车辆控制部3基于这些信息来切换车辆1的驾驶模式。并且,也可以通过使用落座传感器、面部朝向传感器等来自动地切换车辆1的驾驶模式。该情况下,车辆控制部3基于来自落座传感器、面部朝向传感器的输出信号来切换车辆1的驾驶模式。
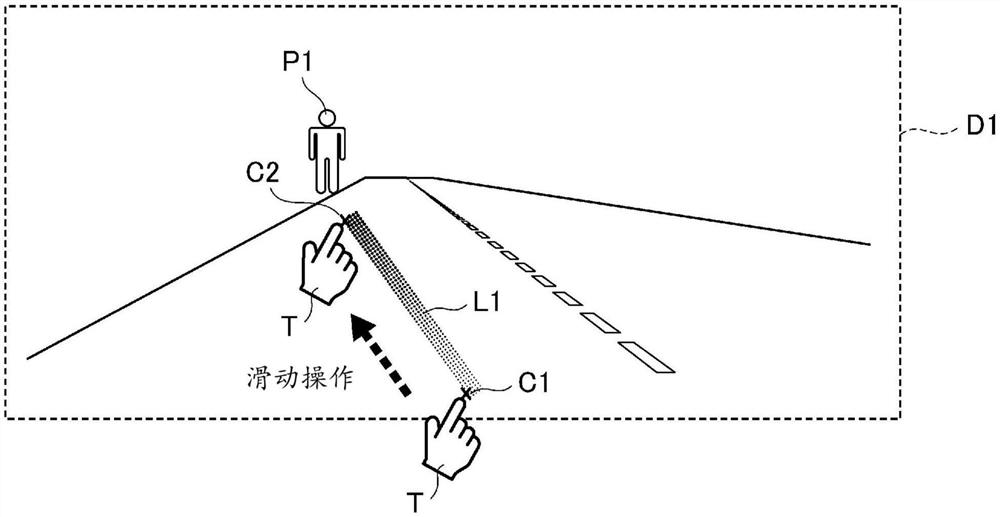
接下来,以下,通过操作图4至图9,对本实施方式的显示系统4的第一动作例进行说明。图4是用于对本实施方式的显示系统4的第一动作例进行说明的流程图。图5是表示车辆1和存在于车辆1的周边的行人P1的图。图6是用于对基于乘客H的视点E的位置和触摸位置C1来确定光图案L1的开始位置e1的方法进行说明的图。图7是表示通过滑动操作来指定HUD显示区域D1上的两个输入位置(触摸位置C1和结束位置C2)的样子的图。图8是表示基于通过滑动操作所指定的两个输入位置将光图案L1向路面上出射的样子的图。图9是表示从车辆1朝向行人P1出射的光图案L1的图。另外,在图7、8中,示出乘客E通过透明屏幕421的HUD显示区域D1视觉确认的前方的周边环境。
如图4所示,在步骤S1中,显示控制部43判定是否检测到乘客H对HUD显示区域D1(触摸面板)的触摸操作。在步骤S1的判定结果为“是”的情况下,处理进入步骤S2。另一方面,在步骤S1的判定结果为“否”的情况下,反复执行步骤S1的判定处理,直到检测到触摸操作为止。
接下来,在步骤S2中,显示控制部43基于乘客H的视点E的位置和乘客H的手T的触摸位置C1(第一输入位置的一个例子,参照图7),来确定路面上的光图案L1的开始位置e1(参照图9)。具体而言,显示控制部43基于表示由内部相机6B获取到的乘客H的图像数据来确定乘客H的视点E的位置。另外,透明屏幕421(触摸面板)根据乘客H的触摸操作来生成表示手T的触摸位置C1的操作信号,在此基础上将该操作信号发送至显示控制部43。接下来,显示控制部43基于视点E的位置和触摸位置C1来确定光图案L1的开始位置e1。在这一点上,如图6所示,将通过视点E的位置和触摸位置C1的直线与路面的交点确定为开始位置e1。
接下来,在步骤S3中,显示控制部43判定乘客H对HUD显示区域D1的滑动操作是否结束。在步骤S3的判定结果为“是”的情况下,处理进入步骤S4。另一方面,在步骤S3的判定结果为“否”的情况下,显示控制部43待机直到乘客H的滑动操作结束为止。
接下来,在步骤S4中,显示控制部43基于乘客H的视点E的位置和滑动操作的结束位置C2(第二输入位置的一个例子,参照图7),来确定路面上的光图案L1的结束位置e2(参照图9)。具体而言,显示控制部43基于由内部相机6B获取到的图像数据来确定乘客H的视点E的位置。并且,透明屏幕421生成表示乘客H的滑动操作的结束位置C2的操作信号,然后将该操作信号发送至显示控制部43。接下来,显示控制部43基于视点E的位置和结束位置C2来确定光图案L1的结束位置e2。
接下来,在步骤S5中,显示控制部43基于开始位置e1和结束位置e2使光图案L1向路面上出射。特别是,如图9所示,显示控制部43控制光图案L1的出射,以使得光图案L1的一端与开始位置e1对应,并且光图案L1的另一端与结束位置e2对应。另外,如图8所示,在乘客H的视野中,触摸位置C1与光图案L1的一端重叠,滑动操作的结束位置C2与光图案L1的另一端重叠。
根据显示系统4的第一动作例,基于乘客H对HUD显示区域D1的输入操作来控制光图案的出射。这样,乘客H能够通过直观的输入操作(例如,滑动操作)来控制光图案的出射。因此,能够提供乘客H手动控制光图案的情况下的可用性提高的显示系统4。
特别是,在本动作例中,根据对HUD显示区域D1的输入操作来开始光图案L1的出射。更具体而言,基于乘客H的视点E的位置和触摸位置C1来确定光图案L1的开始位置e1,并且基于视点E的位置和滑动操作的结束位置C2来确定光图案L1的结束位置e2。并且,基于开始位置e1和结束位置e2将光图案L1向路面上出射。这样,能够通过乘客H的直观的输入操作朝向存在于车辆1的外部的行人P1等对象物出射光图案L1。行人P1通过观察出射到路面上的光图案L1,能够清楚地掌握车辆1识别出行人P1,所以能够安心。这样,能够通过光图案L1实现车辆1与行人P1等对象物之间的丰富的视觉交流。
另外,在本实施方式中,通过乘客H的滑动操作来控制光图案的出射,但乘客H的输入操作并不限定于滑动操作。例如,可以通过滑动操作以外的输入操作(两次的触摸操作)来控制光图案的出射。在该情况下,可以通过第一次的触摸操作确定光图案L1的开始位置e1,并且通过第二次的触摸操作确定光图案L1的结束位置e2。
并且,在本实施方式的说明中,光图案L1是直线状的光图案,光图案L1的形状并不限于直线状,也可以是三角形状、箭头形状等任意的形状。另外,在本实施方式中,基于由内部相机6B获取到的图像数据以规定的周期更新视点E的位置,但本实施方式并不限于此。例如,视点E的位置可以在车辆1的起动时仅决定一次。
接下来,以下,参照图10至图14,对本实施方式的显示系统4的第二动作例进行说明。图10是用于对本实施方式的显示系统4的第二动作例进行说明的流程图。图11是表示从车辆1出射的光图案L2的图。图12是表示在乘客H的视野中通过乘客H的输入操作所指定的第一指定位置C3和光图案L2重叠的样子的图。图13是表示通过乘客H对HUD显示区域D1的滑动操作来变更光图案L2的出射位置的样子的图。图14是表示变更从车辆1出射的光图案L2的出射位置的样子的图。另外,在本动作例中,作为前提条件,设为车辆1已经向路面上出射光图案L2。
如图10所示,在步骤S10中,显示控制部43判定是否检测到乘客H对HUD显示区域D1的触摸操作。在步骤S10的判定结果为“是”的情况下,处理进入步骤S11。另一方面,在步骤S10的判定结果为“否”的情况下,反复执行步骤S10的判定处理,直到检测到触摸操作为止。
接下来,在步骤S11中,显示控制部43基于乘客H的视点E的位置和乘客H的手T的触摸位置C3(第三输入位置的一个例子,参照图12),来确定由乘客H指定的路面上的第一指定位置e3(参照图14)。此处,第一指定位置e3被确定为通过视点E的位置和触摸位置C3的直线与路面的交点。
接下来,在步骤S12中,显示控制部43判定路面上的第一指定位置e3是否与出射到路面上的光图案L2。在步骤S12的判定结果为“是”的情况下,处理进入步骤S13。另一方面,在步骤S12的判定结果为“否”的情况下,处理结束。接下来,显示控制部43判定乘客H对HUD显示区域D1的滑动操作是否结束(步骤S13)。在步骤S13的判定结果为“是”的情况下,处理进入步骤S14。另一方面,在步骤S13的判定结果为“否”的情况下,显示控制部43待机直到乘客H的滑动操作结束为止。
接下来,在步骤S14中,显示控制部43基于乘客H的视点E的位置和滑动操作的结束位置C4(第四输入位置的一个例子,参照图13)来确定路面上的第二指定位置e4(图14参照)。具体而言,显示控制部43基于由内部相机6B获取到的图像数据,来确定乘客H的视点E的位置。并且,透明屏幕421生成表示乘客H的滑动操作的结束位置C4的操作信号,然后将该操作信号发送至显示控制部43。接下来,显示控制部43基于视点E的位置和结束位置C4来确定第二指定位置e4。
接下来,在步骤S15中,显示控制部43基于第二指定位置e4来变更光图案L2的出射位置。在这一点上,如图14所示,显示控制部43变更光图案L2的出射位置,以使得光图案L2的规定的位置与第二指定位置e4重叠。例如,可以变更光图案L2的出射位置,以使得与第一指定位置e3重叠的光图案L2的规定的位置同第二指定位置e4重叠。另外,图13所示,乘客H的视野中,滑动操作的结束位置C4与光图案L2的规定的位置重叠。
根据显示系统4的第二动作例,根据对HUD显示区域D1的输入操作来看变更光图案L2的出射位置。这样,能够通过乘客H的直观的输入操作(例如,滑动操作)来变更光图案L2的出射位置。因此,能够提供乘客H手动控制光图案的情况下的可用性提高的显示系统4。
特别是,在本动作例中,在第一指定位置e3与光图案L2的出射位置重叠的情况下,基于视点E的位置和滑动操作的结束位置C4来确定第二指定位置e4,在此基础上基于第二指定位置e4来变更光图案L2的出射位置。这样,能够通过乘客H的直观的输入操作来变更光图案L2的出射位置。
另外,在显示系统4的第一动作例以及第二动作例的说明中,显示控制部43基于由触摸面板生成的操作信号来确定乘客H的输入操作的两个输入位置(触摸位置以及滑动操作的结束位置),但本实施方式并不限于此。例如,透明屏幕421可以不具有触摸面板。该情况下,可以通过内部相机6B来确定乘客H的输入操作的输入位置。具体而言,如图15所示,显示控制部43可以基于由内部相机6B获取到的图像数据来确定乘客H的手T的位置,然后基于手T的位置来确定输入操作的输入位置C0。并且,显示控制部43也可以基于该图像数据来确定乘客H的视点E的位置。这样,显示控制部43能够基于视点E的位置和输入位置C0来控制光图案的出射位置。此处,将通过视点E和输入位置C0的直线与路面的交点确定为与光图案的出射相关的位置e0。另外,输入位置C0也可以与手T的食指的前端的位置对应。
这样,并不是对触摸面板的输入操作,而能够通过空间中的手T的动作来控制光图案的出射位置。特别是在采用全息图式的HUD作为HUD42的情况下,可以通过空间中的手T的动作来决定输入位置。因此,能够提供乘客H手动控制光图案的情况下的可用性提高的显示系统4。
(第二实施方式)
以下,参照附图,对本发明的第二实施方式(以下,称为第二实施方式。)进行说明。为了便于说明,本附图所示的各部件的尺寸有时实际的各部件的尺寸不同。另外,以下,对于具有与在第一实施方式中已经说明的构成要素相同的参照编号的构成要素,不特别再次说明。
首先,以下,参照图16,对本实施方式所涉及的车辆系统2A进行说明。车辆系统2A搭载在车辆1A(参照图18A)上。图16是车辆系统2A的框图。车辆1A是能够以自动驾驶模式行驶的车辆(汽车)。
如图16所示,车辆系统2A具备车辆控制部3、车辆用显示系统4A(以下,仅称为“显示系统4A”。)、传感器5、相机6以及雷达7。并且,车辆系统2A具备HMI8、GPS9、无线通信部10以及存储装置11。并且,车辆系统2A具备转向促动器12、转向装置13、制动促动器14、制动装置15、加速促动器16以及加速装置17。
显示系统4A具备显示控制部40A、照明装置41A、路面描绘装置42A以及平视显示器(HUD)43A。路面描绘装置42A是第一显示装置的一个例子。HUD43A是第二显示装置的一个例子。
照明装置41A构成为朝向车辆的外部出射光。照明装置41A例如具备设置于车辆的前部的前大灯或位置灯、设置于车辆的后部的后组合灯、设置于车辆的前部或者侧部的转向灯、向行人或其它车辆的驾驶员通知本车辆的状况的各种灯等。
路面描绘装置42A构成为朝向车辆的外部的路面出射光图案。路面描绘装置42A例如具备:构成为出射激光的激光源、构成为使从激光源出射的激光偏转的光偏转装置以及透镜等光学系统部件。激光源例如是构成为分别出射红色激光、绿色激光、蓝色激光的RGB激光源。光偏转装置例如是MEMS反射镜、电流镜、多面镜等。路面描绘装置42A构成为通过对激光进行扫描而在路面上描绘光图案M0、M1(参照图19A)。在激光源为RGB激光源的情况下,路面描绘装置42A能够在路面上描绘各种色的光图案。
只要路面描绘装置42A能够在路面上描绘光图案,则不特别是限定路面描绘装置42A的数量、配置场所以及形状。例如,在路面描绘装置42A的数量为一个的情况下,也可以配置于车顶上的前侧或者后侧的左右方向的正中间。另外,在路面描绘装置42A的数量为两个的情况下,可以在左侧前大灯(未图示)以及右侧前大灯(未图示)或者它们的附近,或左侧后组合灯(未图示)以及右侧后组合灯(未图示)内或者它们的附近分别搭载一个路面描绘装置42A。另外,在路面描绘装置42A的数量为四个的情况下,可以在左侧前大灯(未图示)、右侧前大灯(未图示)、左侧后组合灯(未图示)以及右侧后组合灯(未图示)内或者它们的附近分别搭载一个路面描绘装置42A。
另外,路面描绘装置42A的描绘方式也可以是DLP方式或者LCOS方式。该情况下,代替激光,而使用LED作为光源。
HUD43A被设置在车辆的车内的规定位置。例如,如图18B所示,HUD43A被设置在车辆的仪表板上。另外,没有特别限定HUD43A的设置处位置。HUD43A作为车辆与乘客之间的视觉界面发挥功能。特别是,HUD43A构成为朝向车辆的乘客显示与车辆的行驶相关的车辆行驶信息。车辆行驶信息包括车辆1A的驾驶所涉及的信息(例如,与自动驾驶相关的信息等)、行人信息等。例如,HUD43A构成为对通过车辆与其它车辆之间的车车间通信以及/或者车辆与公共基础设施设备(信号灯等)之间的路车间通信得到的信息进行显示。在这一点上,HUD43A构成为对从其它车辆以及/或者公共基础设施设备发送的消息进行显示。车辆的乘客观察通过HUD43A所显示的消息,能够掌握其它车辆的意图等。另外,例如,HUD43A构成为对从传感器5以及/或者相机6得到的信息进行显示。车辆的乘客观察通过HUD43A显示的消息,能够掌握车辆的行驶状态以及/或者行人信息等。
通过HUD43A显示的信息以与车辆的前方的现实空间叠加的方式在视觉上提示给车辆的乘客。这样,HUD43A作为AR显示器发挥功能。
HUD43A具备图像生成单元、和对由图像生成单元生成的图像进行显示的透明屏幕。在HUD43A的描绘方式为激光投影仪方式的情况下,图像生成单元例如具备:构成为出射激光的激光源、构成为使从激光源出射的激光偏转的光偏转装置以及透镜等光学系统部件。激光源例如是构成为分别出射红色激光、绿色激光以及蓝色激光的RGB激光源。光偏转装置例如是MEMS反射镜。另外,HUD43A的描绘方式也可以是DLP方式或者LCOS方式。该情况下,代替激光而使用LED作为光源。
另外,HUD43A可以不具备透明屏幕。该情况下,由图像生成单元生成的图像也可以显示车辆的前风挡玻璃上。
HMI8还包括通知路面描绘装置42A以及/或者HUD43A的异常的异常开关等。
显示控制部40A构成为控制照明装置41A的驱动。例如,显示控制部40A基于与车辆相关的信息或者与车辆的周边环境相关的信息来控制照明装置41A以出射规定的光。另外,显示控制部40A构成为控制路面描绘装置42A以及HUD43A的驱动。例如,显示控制部40A基于与车辆相关的信息或者与车辆的周边环境相关的信息来控制路面描绘装置42A,以朝向对象物(行人、其它车辆等)或者乘客提示规定的光图案。另外,显示控制部40A基于与车辆相关的信息或者与车辆的周边环境相关的信息来控制HUD43A,以朝向乘客提示规定的消息。
另外,显示控制部40A在判断为在路面描绘装置42A有异常的情况下,控制HUD43A,以显示与光图案对应的信息。例如,在判断为在出射光图案的路面描绘装置42A有异常的情况下,显示控制部40A控制HUD43A,以显示与通过路面描绘装置42A出射的光图案对应的信息。另外,在判断为在出射光图案前在路面描绘装置42A有异常的情况下,显示控制部40A控制HUD43A,以通过路面描绘装置42A显示与出射预定的光图案对应的信息。另外,在有多个光图案的情况下,显示控制部40A也可以控制HUD43A,以显示分别与多个光图案对应的信息。另外,显示控制部40A也可以控制HUD43A,以显示与多个光图案中的一部分的光图案对应的信息。一部分的光图案例如是面向车辆的乘客的光图案(例如,导航用光图案)、存在路面描绘装置42A以及HUD43A这两方所显示的共用的信息的情况下共用的信息以外的信息等。另外,显示控制部40A也可以控制HUD43A,以显示路面描绘装置42A的异常信息。
另外,显示控制部40A在判断为HUD43A有异常的情况下,控制路面描绘装置42A,以显示与车辆行驶信息对应的光图案。例如,在判断为正在显示车辆行驶信息的HUD43A有异常的情况下,显示控制部40A控制路面描绘装置42A,以出射与显示于HUD43A的车辆行驶信息对应的光图案。另外,在判断为在显示车辆行驶信息前在HUD43A有异常的情况下,显示控制部40A控制路面描绘装置42A,以向HUD43A出射与显示预定的车辆行驶信息对应的光图案。另外,在车辆行驶信息有多个的情况下,显示控制部40A可以控制路面描绘装置42A,以出射与多个车辆行驶信息的至少一个车辆行驶信息对应的光图案。例如,控制路面描绘装置42A,以出射与多个车辆行驶信息中的、由容易从光图案读取的图形的信息、简单的文字的信息构成的车辆行驶信息对应的光图案。另外,各车辆行驶信息由图形的信息、文字的信息或者组合了图形的信息和文字的信息的信息构成。例如,在车辆行驶信息中包括难以从光图案读取的信息(例如,文字信息)的情况下,显示控制部40A对车辆行驶信息进行修正(删除,或者,转换为容易从光图案读取的信息(例如,图形信息)),并使路面描绘装置42A出射与修正后的车辆行驶信息对应的光图案。
显示控制部40A由电子控制单元(ECU)构成,与未图示的电源电连接。电子控制单元包括:包括一个以上的处理器以及一个以上的存储器的计算机系统(例如,SoC等)、和由晶体管等有源元件以及无源元件构成的模拟处理电路。模拟处理电路具备构成为控制照明装置41A的灯的驱动的灯驱动电路(例如,LED驱动器等)。另外,模拟处理电路包括构成为控制路面描绘装置42A的激光源的驱动的第一激光源控制电路、和构成为控制路面描绘装置42A的光偏转装置的驱动的第一光偏转装置控制电路。另外,模拟处理电路包括构成为控制HUD43A的激光源的驱动的第二激光源控制电路、和构成为控制HUD43A的光偏转装置的驱动的第二光偏转装置控制电路。处理器例如是CPU、MPU、GPU以及/或者TPU。存储器包括ROM和RAM。另外,计算机系统也可以由ASIC、FPGA等非冯诺依曼型计算机构成。
例如,显示控制部40A的计算机系统基于从车辆控制部3发送的指示信号来确定向车辆的外部照射的光图案,在此基础上将表示该确定的光图案的信号发送至第一激光源控制电路以及第一光偏转装置控制电路。第一激光源控制电路基于表示光图案的信号来生成用于控制激光源的驱动的控制信号,在此基础上将该生成的控制信号发送至路面描绘装置42A的激光源。另一方面,第一光偏转装置控制电路基于表示光图案的信号来生成用于控制光偏转装置的驱动的控制信号,在此基础上将该生成的控制信号发送至路面描绘装置42A的光偏转装置。这样,显示控制部40A能够控制路面描绘装置42A的驱动。
另外,显示控制部40A的计算机系统基于从车辆控制部3发送的指示信号来确定显示于HUD43A的图像信息(例如,文字、图形的信息),在此基础上将表示该确定的图像信息的信号发送至第二激光源控制电路以及第二光偏转装置控制电路。第二激光源控制电路基于表示图像信息的信号来生成用于控制激光源的驱动的控制信号,在此基础上将该生成的控制信号发送至HUD43A的激光源。另一方面,第二光偏转装置控制电路基于表示图像信息的信号来生成用于控制光偏转装置的驱动的控制信号,在此基础上将该生成的控制信号发送至HUD43A的光偏转装置。这样,显示控制部40A能够控制HUD43A的驱动。
另外,显示控制部40A的计算机系统在判断为路面描绘装置42A是异常的情况下,基于上述确定的光图案来确定显示于HUD43A的图像信息(例如,文字、图形的信息)。而且,显示控制部40A的计算机系统将表示所确定的图像信息的信号发送至第二激光源控制电路以及第二光偏转装置控制电路。
另外,显示控制部40A的计算机系统在判断为HUD43A是异常的情况下,基于上述确定的显示于HUD43A的图像信息来确定通过路面描绘装置42A向车辆的外部照射的光图案。而且,显示控制部40A的计算机系统将表示所确定的光图案的信号发送至第一激光源控制电路以及第一光偏转装置控制电路。
另外,在本实施方式中,针对照明装置41A、路面描绘装置42A以及HUD43A,设置有共用的显示控制部40A,但也可以针对每个设置单独的显示控制部。另外,在本实施方式中,车辆控制部3和显示控制部40A被设置为独立的结构,但车辆控制部3和显示控制部40A也可以一体地构成。在这一点上,显示控制部40A和车辆控制部3也可以由单一的电子控制单元构成。该情况下,车辆用显示系统4A成为也包括车辆控制部3的结构。
例如在显示控制部40A中进行路面描绘装置42A以及HUD43A的异常的判断。显示控制部40A例如基于描绘在路面上的光图案的拍摄图像进行路面描绘装置42A的异常的判断。显示控制部40A从车辆控制部3获取由相机6拍摄到的光图案的拍摄图像,并判断该拍摄图像的光图案是否与通过路面描绘装置42A出射的光图案一致。例如,在拍摄图像不包括光图案的情况下,显示控制部40A判断为路面描绘装置42A的激光源或者到激光源的信号路径产生异常。另外,在拍摄图像所包括的光图案的形状与参照用光图案的形状不一致的情况下,显示控制部40A判断为路面描绘装置42A的光偏转装置产生异常。参照用光图案被预先存储至显示控制部40A的存储器或者存储装置11,例如是通过在路面上描绘各光图案并拍摄,从该拍摄图像提取出的光图案。
另外,显示控制部40A例如基于来自路面描绘装置42A的信号来进行路面描绘装置42A的异常的判断。路面描绘装置42A具有自己诊断功能,在产生异常的情况下,也可以向显示控制部40A发送异常信号。另外,在路面描绘装置42A具有若从显示控制部40A接收到信号(例如,表示光图案的信号)则向显示控制部40A发送接收确认信号的结构的情况下,显示控制部40A未从路面描绘装置42A接收到接收确认信号时,可以判断为在路面描绘装置42A产生异常。
另外,显示控制部40A例如基于来自车辆的乘客的异常信号来进行路面描绘装置42A的异常的判断。车辆的乘客确认描绘在路面上的光图案,判断为光图案是异常的情况下,操作HMI8的异常开关等。显示控制部40A在从车辆控制部3接收到基于异常开关的操作的异常信号的情况下,可以判断为在路面描绘装置42A产生异常。
显示控制部40A同样地例如基于来自HUD43A的信号(例如,异常信号、接收确认信号),基于来自车辆的乘客的异常信号,或者,基于由设置在车辆的车内的相机6拍摄的HUD43A的显示画面的拍摄图像来进行HUD43A的异常的判断。
另外,对于路面描绘装置42A以及HUD43A的异常的判断,也可以代替显示控制部40A而由车辆控制部3进行。车辆控制部3在判断为路面描绘装置42A或者HUD43A产生异常的情况下,将异常信号向显示控制部40A发送。
接下来,主要参照图17至图21,对第二实施方式所涉及的显示控制部40A的显示控制的一个例子进行说明。图17是用于对第二实施方式所涉及的显示控制部的显示控制的一个例子进行说明的流程图。图18A是用于对第二实施方式所涉及的路面描绘显示的一个例子进行说明的图。图18B是用于对第二实施方式所涉及的HUD显示的一个例子进行说明的图。图19是用于对第二实施方式所涉及的路面描绘显示异常时的HUD显示的一个例子进行说明的图。图20A是用于对第二实施方式的HUD显示的一个例子进行说明的图。图20B是用于对第二实施方式所涉及的路面描绘显示的一个例子进行说明的图。图21是用于对第二实施方式的HUD显示异常时的路面描绘显示的一个例子进行说明的图。
第二实施方式所涉及的显示控制部40A判断为正在出射规定的光图案的路面描绘装置42A或者正在显示规定的车辆行驶信息的HUD43A有异常的情况下,使应通过判断为异常的装置显示的信息显示于正常的装置。
如图17所示,在步骤S21中,显示控制部40A基于从车辆控制部3获取到的周边环境信息等控制路面描绘装置42A,以朝向路面出射规定的光图案。在步骤S22中,显示控制部40A基于从车辆控制部3获取到的行驶状态信息等控制HUD43A,以显示车辆行驶信息。图18A表示通过路面描绘装置42A在路面上描绘的光图案M0,图18B表示显示在HUD43A上的车辆行驶信息M1。光图案M0由20m的文字信息以及表示左转弯的箭头的图形信息构成,是催促车辆1A的乘客在前面20m左转弯的导航用光图案。车辆行驶信息M1是表示当前以时速50公里行驶的车辆的速度信息。
接下来,在步骤S23中,显示控制部40A判断在路面描绘装置42A是否产生异常。在路面描绘装置42A是异常的情况下(步骤S23的是),显示控制部40A在步骤S24中判断HUD43A是否产生异常。显示控制部40A例如基于光图案的拍摄图像,基于来自路面描绘装置42A的信号(例如,异常信号),或者,基于来自车辆的乘客的异常信号,进行路面描绘装置42A的异常的判断。另外,显示控制部40A例如基于HUD43A的显示画面的拍摄图像,基于来自HUD43A的信号(例如,异常信号),或者,基于车辆的乘客的异常信号,进行HUD43A的异常的判断。
在HUD43A是正常的情况下(步骤S24的“否”),显示控制部40A在步骤S25中使HUD43A显示与通过路面描绘装置42A出射的光图案对应的信息。另外,显示控制部40A也可以中止通过路面描绘装置42A显示光图案的显示。例如,在路面描绘装置42A以及HUD43A进行图18A以及图18B的显示的情况下,如图19所示,显示控制部40A使HUD43A显示与在路面上描绘的光图案M0对应的信息M2。另外,显示控制部40A中止通过路面描绘装置42A显示光图案M0。另外,除了与光图案M0对应的信息M2之外,显示控制部40A还可以使HUD43A显示路面描绘装置42A产生异常的意思的消息M3。另一方面,在步骤S24中,在HUD43A是异常的情况下,显示控制部40A在步骤S26中中止路面描绘装置42A以及HUD43A的显示。另外,在图19中,信息M2使用与光图案M0相同的文字信息以及图形信息,但并不限于此。
在步骤S23中,在路面描绘装置42A是正常的情况下(步骤S23的“否”),显示控制部40A在步骤S27中继续路面描绘装置42A的显示。接下来,在步骤S28中,显示控制部40A判断HUD43A是否产生异常。在HUD43A的异常的情况下(步骤S28的是),显示控制部40A在步骤S29中使路面描绘装置42A出射与显示于HUD43A的车辆行驶信息对应的光图案。
例如,图20A表示显示于HUD43A的车辆行驶信息M1以及车辆行驶信息(行人信息)M4,图20B表示通过路面描绘装置42A在路面上描绘的光图案M5。车辆行驶信息M4是表示行人101从前面20m的左侧进入的行人信息。光图案M5是通过箭头的图形催促车辆1A的乘客前进的导航用光图案。在步骤S21以及步骤S22中,在HUD43A以及路面描绘装置42A进行图20A以及图20B的显示的情况下,显示控制部40A若判断为HUD43A产生异常,则如图21所示,控制路面描绘装置42A,以出射与显示于HUD43A的车辆行驶信息M4对应的光图案M6。光图案M6一部分不包括车辆行驶信息M4的文字信息(“从左侧进入”),另外,使用与车辆行驶信息M4不同的图形信息。另一方面,在步骤S28中,在HUD43A是正常的情况下(步骤S28的“否”),显示控制部40A在步骤S30中继续HUD43A的显示。另外,在图21中,光图案M6使用与车辆行驶信息M4不同的文字信息以及图形信息,但并不限于此。
这样,在本实施方式中,显示控制部40A在判断为路面描绘装置42A有异常的情况下,使HUD43A显示与通过路面描绘装置42A出射的光图案对应的信息。另外,显示控制部40A在判断为HUD43A有异常的情况下,使路面描绘装置42A出射与显示于HUD43A的车辆行驶信息对应的光图案。这样,即使在判断为路面描绘装置42A以及/或者HUD43A有异常的情况下,也能够继续车辆与乘客之间的视觉交流。
另外,在判断为HUD43A有异常的情况下,显示控制部40A使路面描绘装置42A出射与显示于HUD43A的多个车辆行驶信息M1、M4中的、容易从光图案读取的车辆行驶信息M4对应的光图案M6。另外,显示控制部40A使路面描绘装置42A出射车辆行驶信息M4中的、仅包括容易从光图案读取的信息(例如,图形信息、简单的文字信息)的光图案M6。由此,车辆的乘客能够正确地掌握与异常前几乎相同的信息。另外,显示控制部40A将车辆行驶信息M4中的一部分的信息(例如,图形信息)转换为容易从光图案读取的信息(例如,转换为不同的图形信息),并使路面描绘装置42A出射包括转换后的信息的光图案M6。由此,车辆的乘客能够更正确地掌握与车辆行驶信息几乎相同的信息。
另外,在本实施方式中,在图18A以及图19中,路面描绘装置42A出射一个光图案M0,HUD43A显示与该光图案M0对应的信息M2,但并不限于此。在路面描绘装置42A出射多个光图案的情况下,显示控制部40A可以使HUD43A显示与全部或者一部分的光图案对应的信息。
另外,在图20A以及图21中,通过路面描绘装置42A出射与HUD43A显示的车辆行驶信息M1以及车辆行驶信息M4中的车辆行驶信息M4对应的光图案M6,但并不限于此。显示控制部40A也可以使路面描绘装置42A出射与全部的车辆行驶信息对应的光图案。
(第三实施方式)
接下来,对于本发明的第三实施方式(以下,称为第三实施方式。)所涉及的显示控制部40A的显示控制的一个例子,主要参照图22进行说明。图22是用于对第三实施方式所涉及的显示控制部的显示控制的一个例子进行说明的流程图。另外,在第三实施方式的说明中,为了便于说明,对于具有与在第二实施方式的说明中已经说明的部件相同的参照编号的部件,省略其说明。
第三实施方式所涉及的显示控制部40A基于从车辆控制部3发送的指示信号判断为在使路面描绘装置42A以及HUD43A显示规定的光图案以及规定的车辆行驶信息前路面描绘装置42A或者HUD43A有异常的情况下,使正常的装置显示应通过判断为异常的装置显示的信息。
如图22所示,显示控制部40A若从车辆控制部3接收到路面描绘显示以及HUD显示的指示信号,则在步骤S31中,判断路面描绘装置是否产生异常。在路面描绘装置42A是异常的情况下(步骤S31的是),显示控制部40A在步骤S32中判断HUD43A是否产生异常。显示控制部40A例如向路面描绘装置42A以及HUD43A发送表示光图案或者图像信息的信号,并在规定期间内从路面描绘装置42A或者HUD43A未接收到接收确认信号的情况下,判断为路面描绘装置42A或者HUD43A产生异常。另外,显示控制部40A可以在存储器或者存储装置11中存储路面描绘装置42A以及HUD43A的异常信息,并基于该异常信息来进行路面描绘装置42A或者HUD43A的异常判断。异常信息例如在从路面描绘装置42A、HUD43A或者车辆的乘客接收到异常信号的定时、在过去的路面描绘显示或者HUD显示中判断出异常的定时由显示控制部40A存储至存储器或者存储装置11。
在HUD43A是正常的情况下(步骤S32的“否”),显示控制部40A在步骤S33中基于从车辆控制部3获取的周边环境信息等,不使所确定出的光图案从路面描绘装置42A出射,而使HUD43A显示与该光图案对应的信息。例如,显示控制部40A在判断为路面描绘装置42A是异常的情况下,不进行通过路面描绘装置42A对图18A的光图案M0的路面描绘,如图19所示,而使HUD43A显示与光图案M0对应的信息M2。另外,除了与光图案M0对应的信息M2之外,显示控制部40A还可以将路面描绘装置42A产生异常的意思的消息M3显示于HUD43A。另一方面,在步骤S32中,HUD43A是异常的情况下(步骤S32的是),显示控制部40A在步骤S34中不进行路面描绘装置42A以及HUD43A的显示。
在步骤S31中,在路面描绘装置42A是正常的情况下(步骤S31的“否”),显示控制部40A,在步骤S35中,基于从车辆控制部3获取到的周边环境信息等,控制路面描绘装置42A,以朝向路面出射规定的光图案。例如,如图18A所示,显示控制部40A使光图案M0从路面描绘装置42A出射。接下来,在步骤S36中,显示控制部40A判断HUD43A是否产生异常。在HUD43A是异常的情况下(步骤S36的是),显示控制部40A在步骤S37中,基于从车辆控制部3获取到的行驶状态信息等,不使HUD43A显示所确定的车辆行驶信息,而使路面描绘装置42A出射与该车辆行驶信息对应的光图案。例如,显示控制部40A在判断为HUD43A是异常的情况下,不进行HUD43A的图20A的车辆行驶信息M1以及车辆行驶信息M4的显示,而使路面描绘装置42A出射与车辆行驶信息M4对应的光图案M6。另一方面,在步骤S36中,在HUD43A是正常的情况下(步骤S36的“否”),显示控制部40A在步骤S38中控制HUD43A,以显示规定的车辆行驶信息。例如,如图20A所示,显示控制部40A使HUD43A显示车辆行驶信息M1以及车辆行驶信息M4。
这样,在本实施方式中,显示控制部40A在判断为路面描绘装置42A有异常的情况下,使HUD43A显示与通过路面描绘装置42A出射预定的光图案对应的信息。另外,显示控制部40A在判断为HUD43A有异常的情况下,使路面描绘装置42A出射与HUD43A显示预定的车辆行驶信息对应的光图案。这样,即使在判断为路面描绘装置42A以及/或者HUD43A有异常的情况下,也能够进行车辆与乘客之间的视觉交流。
另外,在判断为HUD43A有异常的情况下,显示控制部40A使路面描绘装置42A出射与HUD43A显示预定的多个车辆行驶信息M1、M4中的、容易从光图案读取的车辆行驶信息M4对应的光图案M6。另外,显示控制部40A使路面描绘装置42A出射车辆行驶信息M4中仅包括容易从光图案读取的信息(例如,图形信息、简单的文字信息)的光图案M6。另外,显示控制部40A将车辆行驶信息M4中的一部分的信息(例如,图形信息)转换为容易从光图案读取的信息(例如,转换为不同的图形信息),并使路面描绘装置42A出射包括转换后的信息的光图案M6。由此,能够正确地向车辆的乘客传递规定的信息。
另外,在本实施方式中,在步骤33中,显示控制部40A在确定出多个光图案的情况下,可以使HUD43A显示与全部或者一部分的光图案对应的信息。
另外,在步骤S37中,显示控制部40A在确定出多个车辆行驶信息的情况下,可以使路面描绘装置42A出射与全部车辆行驶信息对应的光图案。
在上述实施方式中,显示控制部40A在判断出路面描绘装置42A的异常后,判断HUD43A的异常,但并不限于此。显示控制部40A也可以在判断HUD43A的异常后,判断路面描绘装置42A的异常。
另外,在上述实施方式中,显示控制部40A判断路面描绘装置42A以及HUD43A这两方的异常,但并不限于此。显示控制部40A也可以判断路面描绘装置42A以及HUD43A的任意一方的异常,并在判断为路面描绘装置42A以及HUD43A的一方异常的情况下,可以使路面描绘装置42A以及HUD43A的另一方显示应显示于被判断为异常的路面描绘装置42A以及HUD43A的一方的信息。例如,如图23或者图24所示,显示控制部40A判断路面描绘装置42A的异常,并在将路面描绘装置42A判断为异常的情况下,可以使HUD43A显示与光图案对应的信息。图23的步骤S41~44与图17的步骤S21、S23、S25、S27对应,图24的步骤S51~S53与图22的步骤S31、S33、S35对应,所以省略其详细的说明。另外,图23以及图24示出判断路面描绘装置的异常的例子,但同样地也可以仅判断HUD43A的异常。
(第四实施方式)
以下,参照附图,对本发明的第四实施方式(以下,称为本实施方式。)进行说明。为了便于说明,本附图所示的各构件的尺寸有时与实际的各构件的尺寸不同。
首先,以下,参照图25以及图26,对本实施方式所涉及的车辆系统2B进行说明。图25是搭载了车辆系统2B的车辆1B的主视图。图26是车辆系统2B的框图。车辆1B是能够以自动驾驶模式行驶的车辆(汽车)。
如图26所示,车辆系统2B具备车辆控制部3、车辆用显示系统4B(以下,仅称为“显示系统4B”。)、传感器5、相机6以及雷达7。并且,车辆系统2B具备HMI8、GPS9、无线通信部10、存储装置11、转向促动器12、转向装置13、制动促动器14、制动装置15、加速促动器16以及加速装置17。
显示系统4B具备左侧前大灯20L、右侧前大灯20R、左侧路面描绘装置45L以及右侧路面描绘装置45R。并且,显示系统4B具备HUD42B和显示控制部43BB。
HUD42B位于车辆1B的内部。具体而言,HUD42B被设置在车辆1B的室内的规定位置。例如,如图27所示,HUD42B也可以配置在车辆1B的仪表板内。HUD42B作为车辆1B与乘客H之间的视觉界面而发挥功能。HUD42B构成为以规定的信息(以下,称为HUD信息。)与车辆1B的外部的现实空间(特别是,车辆1B的前方的周边环境)叠加的方式将该HUD信息向乘客H显示。这样,HUD42B作为AR显示器发挥功能。通过HUD42B显示的HUD信息例如是与车辆1B的行驶相关的车辆行驶信息以及/或者与车辆1B的周边环境相关的周边环境信息(特别是,与存在于车辆1B的外部的对象物相关的信息)。
如图27所示,HUD42B具有HUD主体部420B和透明屏幕421B。HUD主体部420B具有光源部、驱动反射镜、光学系统、光源驱动电路以及反射镜驱动电路。光源部例如是激光源或者LED光源。激光源例如是构成为分别出射红色激光、绿光激光以及蓝色激光的RGB激光源。驱动反射镜例如是MEMS反射镜、DMD、电流镜、多面镜等。光学系统包括棱镜、透镜、扩散板、放大镜中的至少一个。光源驱动电路构成为对光源部进行驱动控制。光源驱动电路构成为基于从显示控制部43B发送的图像数据来生成用于控制光源部的动作的控制信号,在此基础上将该生成的控制信号发送至光源部。反射镜驱动电路构成为对驱动反射镜进行驱动控制。反射镜驱动电路构成为基于从显示控制部43B发送的图像数据来生成用于控制驱动反射镜的动作的控制信号,然后将该生成的控制信号发送至驱动反射镜。
透明屏幕421B由前窗60的一部分构成。透明屏幕421B具有能够显示HUD信息的HUD显示区域D10(参照图30)。从HUD主体部420B出射的光(图像)照射到透明屏幕421B的HUD显示区域D10。接下来,HUD显示区域D10使从HUD主体部420B出射的光朝向乘客H的视点E反射。其结果,乘客H将从HUD主体部420B出射的光(图像)识别为形成在透明屏幕421B的前方的规定的位置的虚像。这样,通过HUD42B显示的HUD信息(图像)与车辆1B的前方的现实空间叠加的结果是乘客H能够感觉到该HUD信息漂浮在道路上。
另外,透明屏幕421B也可以构成为与前窗60分离的透明的合成器。即使在该情况下,合成器也具有HUD显示区域。并且,乘客H将从HUD主体部420B出射的光(图像)识别为形成在合成器的前方的规定的位置的虚像。另外,形成虚像的位置(虚像形成位置)可以通过调整HUD42B的光学系统的位置(特别是,投影光学系统的焦距)而可变。在这一点上,显示控制部43B(特别是,第一电子控制单元47B)能够基于存在于车辆1B的前方的对象物的位置信息来控制HUD42B,以使得对象物的位置和虚像形成位置大致一致。另外,HUD42B的描绘方式可以是光栅扫描方向、DLP方式或者LCOS方式。在采用DLP方式或者LCOS方式的情况下,HUD42B的光源部可以是LED光源。
显示控制部43B构成为控制路面描绘装置45(具体而言,左侧路面描绘装置45L和右侧路面描绘装置45R)、前大灯20(具体而言,左侧前大灯20L和右侧前大灯20R)以及HUD42B的动作。在这一点上,显示控制部43B构成为控制路面描绘装置45(具体而言,左侧路面描绘装置45L右侧路面描绘装置45R)的动作,以向路面上的规定的位置照射光图案照射。并且,显示控制部43B构成为控制HUD42B的动作,以将HUD信息显示于HUD显示区域D10。另外,显示控制部43B构成为决定是否应使路面描绘装置45以及HUD42B进行动作。换句话说,在本实施方式中,显示控制部43B不构成为根据来自车辆控制部3的指示信号来控制路面描绘装置45以及HUD42B的驱动。此外,显示控制部43B构成为基于从车辆控制部3发送的车载传感器的检测数据(例如,图像数据等)来确定车辆1B的周边的对象物,在此基础上决定是否应使路面描绘装置45以及HUD42B进行动作。
显示控制部43B具备第一电子控制单元47B和第二电子控制单元48B。第一电子控制单元47B构成为控制HUD42B的动作。并且,在HUD42B以及路面描绘装置45这两方进行动作的情况下,第一电子控制单元47B控制HUD42B以及路面描绘装置45这两方的动作。第一电子控制单元47B包括:包括一个以上的处理器和一个以上的存储器的计算机系统(例如,SoC等)、和由晶体管等有源元件以及无源元件构成的电子电路。处理器包括CPU、MPU、GPU以及TPU中的至少一个。存储器包括ROM和RAM。另外,计算机系统也可以由ASIC、FPGA等非冯诺依曼型计算机构成。
第二电子控制单元48B构成为控制前大灯20和路面描绘装置45的动作。特别是,在HUD42B未进行动作而前大灯20和路面描绘装置45进行动作的情况下,第二电子控制单元48B构成为控制前大灯20和路面描绘装置45的动作。另一方面,在HUD42B、前大灯20以及路面描绘装置45进行动作的情况下,第一电子控制单元47B控制HUD42B以及路面描绘装置45这两方的动作,第二电子控制单元48B控制前大灯20的动作。第二电子控制单元48B包括:包括一个以上的处理器和一个以上的存储器的计算机系统(例如,SoC等)、和由晶体管等有源元件以及无源元件构成的电子电路。处理器包括CPU、MPU、GPU以及TPU中的至少一个。存储器包括ROM和RAM。另外,计算机系统也可以由ASIC/FPGA等非冯诺依曼型计算机构成。
在本实施方式中,构成显示控制部43B的第一电子控制单元47B以及第二电子控制单元48B的一方或者两方可以决定是否应使HUD42B、路面描绘装置45以及前大灯20中的至少一个进行动作。例如,可以第一电子控制单元47B决定是否应使HUD42B进行动作,而第二电子控制单元48B决定是否应使路面描绘装置45以及前大灯20各自进行动作。另外,第一电子控制单元47B(或者第二电子控制单元48B)也可以决定是否应使HUD42B、路面描绘装置45以及前大灯20各自进行动作。
在本实施方式中,第一电子控制单元47B和第二电子控制单元48B被设置为独立的结构,但第一电子控制单元47B和第二电子控制单元48B也可以一体地构成。在这一点上,第一电子控制单元47B和第二电子控制单元48B可以由单一的电子控制单元构成。另一方面,在本实施方式中,车辆控制部3和显示控制部43B被设置为独立的结构。
接下来,以下,主要参照图28至图30对本实施方式的显示系统4B的动作例进行说明。图28是用于对显示系统4B的动作例进行说明的流程图。图29是表示车辆1B朝向存在于车辆1B的周边的行人P1(对象物的一个例子)出射光图案L10的样子的图。图30是表示显示于HUD显示区域D10的HUD信息的一个例子的图。特别是,在图30中,示出乘客H的视野中的HUD信息M11~M14和出射到路面上的光图案L10。
另外,在以下的说明中,设为第一电子控制单元47B决定是否应使HUD42B、路面描绘装置45以及前大灯20各自进行动作。
如图28所示,步骤S61中,第一电子控制单元47B从车辆控制部3获取由外部相机6A以及/或者雷达7获取到的检测数据(例如,图像数据、3D映射数据等)。然后,第一电子控制单元47B基于检测数据确定出行人P1的存在的情况下(步骤S61的“是”),判定行人P1是否存在于距车辆1B规定的距离以内(步骤S62)。另一方面,在步骤S61的判定结果为“否”的情况下,本处理结束。
接下来,第一电子控制单元47B在判定为行人P1存在于距车辆1B规定的距离以内的情况下(步骤S62的“是”),决定将HUD信息显示于HUD42B,并且决定朝向行人P1出射光图案L10(步骤S63)。并且,在步骤S63中,第一电子控制单元47B基于图像数据、3D映射数据等检测数据来生成与对象物(在本例中,行人P1)相关的信息(例如,对象物的属性信息、对象物相对于车辆1B的位置信息以及与对象物的将来行动相关的信息)。
接下来,第一电子控制单元47B基于与对象物相关的信息来控制HUD42B的动作,以使HUD信息M11~M14显示于HUD42B(特别是,HUD显示区域D10)。特别是,第一电子控制单元47B将用于控制HUD42B的动作的控制信号发送至HUD42B。基于该控制信号在HUD显示区域D10上显示HUD信息M11~M14。此处,HUD信息M11包括对象物的属性信息和对象物相对于车辆1B的位置信息。如图30所示,HUD信息M11表示行人作为对象物的属性信息,并且表示26m作为对象物的位置信息。另外,HUD信息M12包括与对象物的行动预测相关的信息。如图30所示,HUD信息M12表示行人P1穿过人行横道C的预定作为行人P1的行动预测信息。
另外,HUD信息M13包括表示对象物的存在的信息。如图30所示,HUD信息M13表示行人标记作为表示行人P1的存在的信息。另外,HUD信息M13也可以包括“有行人”等文本信息、感叹号等的图形信息作为表示对象物的存在的信息。HUD信息M14是包围行人P1的框图案。
另一方面,在步骤S63中,第一电子控制单元47B基于与对象物相关的信息来控制路面描绘装置45的动作,以使得路面描绘装置45朝向行人P1向路面上出射光图案L10。特别是,第一电子控制单元47B经由第二电子控制单元48B将用于控制路面描绘装置45的动作的控制信号发送至路面描绘装置45。基于该控制信号,路面描绘装置45向路面上出射光图案L10。如图29所示,光图案L10是从车辆1B朝向行人P1延伸的直线状的光图案。这样,光图案L10能够在视觉上将车辆1B和行人P1建立关联。并且,车辆1B的乘客H能够通过视觉确认光图案L10而清楚地掌握行人P1的存在。光图案L10的形状并不限于直线状,也可以是三角形状、箭头形状等任意的形状。
另外,在本实施方式中,以乘客H存在于车辆1B为前提。因此,为了实现车辆1B与乘客H之间的视觉交流,HUD42B进行动作,但在乘客H不存在于车辆1B的情况下,HUD42B也可以不动作。换言之,在车辆1B没有乘客H而以完全自动驾驶模式行驶中的情况下,朝向行人P1出射光图案L10,在HUD42B不显示与行人P1相关的HUD信息。在所述的情况下,第二电子控制单元48B可以执行步骤S61~S63的处理。特别是,在步骤S63中,第二电子控制单元48B决定朝向行人P1出射光图案L10,在此基础上控制路面描绘装置45的动作,以朝向行人P1向路面上出射光图案L10。这样,在HUD42B进行动作的情况下,第一电子控制单元47B控制HUD42B和路面描绘装置45的动作。另一方面,在HUD42B未进行动作的情况下,第二电子控制单元48B控制路面描绘装置45的动作。
另外,若提及前大灯20的动作控制,则前大灯20的动作也可以始终被第二电子控制单元48B控制。换句话说,在HUD42B未进行动作的情况下,第二电子控制单元48B也可以控制路面描绘装置45以及前大灯20的动作。另一方面,在HUD42B进行动作的情况下,第一电子控制单元47B也可以控制HUD42B以及路面描绘装置45的动作,而第二电子控制单元48B也可以控制前大灯20的动作。
根据本实施方式,代替控制车辆1B的行驶的车辆控制部3,显示控制部43B(特别是,第一电子控制单元47B)决定是否应使路面描绘装置45以及HUD42B进行动作,并且控制路面描绘装置45以及HUD42B的动作。这样,能够减少车辆控制部3的运算负荷,并且可以使路面描绘装置45以及HUD42B的动作高速化。
另外,在HUD42B未进行动作的情况下,第二电子控制单元48B控制路面描绘装置45的动作。另一方面,在HUD42B进行动作的情况下,第一电子控制单元47B控制HUD42B以及路面描绘装置45的动作。这样,在HUD42B和路面描绘装置45这两方进行动作的情况下,能够使HUD42B和路面描绘装置45中的至少一方高效且高速地进行动作。特别是,在HUD42B和路面描绘装置45相互协调进行动作的情况下(例如,根据HUD信息的显示位置来决定光图案L10的出射位置的情况下或根据光图案L10的出射位置来决定HUD信息的显示位置的情况下等),第一电子控制单元47B生成用于控制HUD42B的动作的控制信号和用于控制路面描绘装置45的动作的控制信号。因此,能够在考虑到HUD42B的动作内容的基础上,使路面描绘装置45高效且高速地进行动作。或者,能够在考虑到路面描绘装置45的动作内容的基础上,使HUD42B高效且高速地进行动作。
另外,在本实施方式中,前大灯20的动作始终由第二电子控制单元48B控制,但本实施方式并不限于此。例如,在HUD42B进行动作的情况下,第一电子控制单元47B也可以控制HUD42B、路面描绘装置45以及前大灯20的全部动作。在HUD42B、路面描绘装置45以及前大灯20全部进行动作的情况下,能够使它们中的至少一个高效且高速地进行动作。特别是,能够在考虑到HUD42B的动作内容的基础上,使路面描绘装置45以及/或者前大灯20高效且高速地进行动作。或者,能够在考虑到路面描绘装置45以及/或者前大灯20的动作内容的基础上,使HUD42B高效且高速地进行动作。
以上,说明了本发明的实施方式,但不言而喻,本发明的技术范围不应由本实施方式的说明而限定性地解释。本领域技术人员认可本实施方式仅是一例,在权利要求书记载的发明的范围内,可进行各种各样的实施方式的变更。本发明的技术范围应基于权利要求书记载的发明的范围及其均等的范围确定。
在本实施方式中,设为车辆的驾驶模式包括完全自动驾驶模式、高度驾驶辅助模式、驾驶辅助模式以及手动驾驶模式进行了说明,但车辆的驾驶模式并不限于这四个模式。可以按照各国的自动驾驶的法令或者规则适当地变更车辆的驾驶模式的区分。同样地,在本实施方式的说明中所记载的“完全自动驾驶模式”、“高度驾驶辅助模式”、“驾驶辅助模式”各自的定义只是一例,也可以按照各国的自动驾驶的法令或者规则,适当地变更这些定义。
本申请适当地引用2018年9月5日申请的日本专利申请(日本特愿2018-166043号)所公开的内容、2018年9月5日申请的日本专利申请(日本特愿2018-166044号)所公开的内容、以及2018年9月5日申请的日本专利申请(日本特愿2018-166045号)所公开的内容。
- 用于车辆系统的控制模块、车辆系统以及具有这种车辆系统的车辆
- 车辆系统的交互方法、车辆钥匙、车辆及车辆系统