一种单轴式对置凹面阵列六通道分区驱动控制装置
文献发布时间:2023-06-19 13:48:08
技术领域
本发明涉及超声悬浮技术领域,特别是涉及一种单轴式对置凹面阵列六通道分区驱动控制装置。
背景技术
超声悬浮是前沿研究领域之一。超声悬浮技术是利用超声波产生的声辐射力将物体悬浮在空气中,可以在不接触物体的情况下实现对单个或多个物体的移动和融合,在材料化学、生物医学、微纳制造等领域有着广泛的应用前景。目前应用最广泛的单轴式超声悬浮阵列多控制物体在一维空间(竖直方向)中运动,存在可控范围小、可应用场景少等缺点。如何利用单轴式对置凹面阵列实现多种运动以及扩展其应用的场景是待解决的问题。
发明内容
本发明的目的是提供一种单轴式对置凹面阵列六通道分区驱动控制装置,以实现单轴式对置凹面阵列的可控运动范围的扩展,进而实现更多种类的运动。
为实现上述目的,本发明提供了如下方案:
本发明提供一种单轴式对置凹面阵列六通道分区驱动控制装置,所述控制装置包括:控制模块、驱动模块、电源模块和六分区处理的单轴式对置凹面阵列;
所述电源模块分别与所述控制模块和所述驱动模块的电源输入端连接,用于为所述控制模块和所述驱动模块提供直流电压;
所述控制模块的信号输出端与所述驱动模块的信号输入端连接,所述控制模块用于输出六路脉冲调制信号至所述驱动模块;
所述驱动模块的六路输出端口分别与单轴式对置凹面阵列的六个扇区连接,所述驱动模块用于将六路脉冲调制信号进行放大,并将放大后的六路脉冲调制信号分别输出给单轴式对置凹面阵列的六个扇区。
可选的,所述电源模块包括直流稳压电路、第一降压稳压电路和第二降压稳压电路;
所述直流稳压电路分别与所述第一降压稳压电路和所述第二降压稳压电路连接;
所述直流稳压电路用于将220V交流电转换为+24V直流电和-24V直流电;
所述第一降压稳压电路用于将+24V直流电和-24V直流电转换为+5V直流电和-5V直流电;
所述第二降压稳压电路用于将+5V直流电转换为+3.3V直流电;
所述第二降压稳压电路与所述控制模块的电源输入端连接;
所述直流稳压电路、所述第一降压稳压电路和所述第二降压稳压电路分别与所述驱动模块的控制电源端、信号升压电源端和驱动电源端连接。
可选的,所述直流稳压电路包括变压器、桥式整流电路、第一线性稳压器和第二线性稳压器;
所述变压器的输入端连接220V交流电,所述变压器的输出端与桥式整流电路的输入端连接;
所述桥式整流电路的正极输出端与第一线性稳压器的第一端口连接,所述桥式整流电路的负极输出端与第二线性稳压器的第三端口连接;
所述第一线性稳压器的第三端口和所述第二线性稳压器的第一端口分别接地,所述第一线性稳压器的第二端口用于输出+24V直流电,所述第二线性稳压器的第二端口用于输出-24V直流电;
所述第一线性稳压器的第一端口与地之间设置有并联连接的电解电容C61和陶瓷电容C62,所述第一线性稳压器的第二端口与地之间设置有并联连接的电解电容C63和陶瓷电容C64;
所述第二线性稳压器的第三端口与地之间设置有并联电解的电解电容C65和陶瓷电容C66,所述第二线性稳压器的第二端口与地之间设置有并联连接的电解电容C67和陶瓷电容C68。
可选的,所述第一降压稳压电路包括第三线性稳压器和第四线性稳压器;
所述第三线性稳压器的第一端口与第一线性稳压器的第二端口连接,所述第四线性稳压器的第三端口与所述第二线性稳压器的第二端口连接;
所述第三线性稳压器和所述第四线性稳压器的第二端口分别接地,所述第三线性稳压器的第三端口用于输出+5V直流电,所述第四线性稳压器的第一端口用于输出-5V直流电;
所述第三线性稳压器的第一端口与地之间设置有电解电容C69,所述第三线性稳压器的第三端口与地之间设置有并联连接的电解电容C70和陶瓷电容C71;
所述第四线性稳压器的第三端口与地之间设置有电解电容C76,所述第四线性稳压器的第一端口与地之间设置有并联连接的电解电容C77和陶瓷电容C78。
可选的,所述第二降压稳压电路包括低压差线性稳压器;
所述低压差线性稳压器的第三端口与第三线性稳压器的第三端口连接;
所述低压差线性稳压器的第一端口接地,所述低压差线性稳压器的第二端口用于输出+3.3V直流电;
所述低压差线性稳压器的第三端口和地之间设置有并联连接的陶瓷电容C72和陶瓷电容C73,所述低压差线性稳压器的第二端口与地之间设置有并联连接的陶瓷电容C74和陶瓷电容C75。
可选的,所述第一线性稳压器的型号为LM7824,所述第二线性稳压器的型号为LM7924,第三线性稳压器的型号为LM7805,所述第四稳压器的型号为LM7905,所述低压差线性稳压器的型号为AMS1117。
可选的,所述控制模块包括:STM32F103C8T6芯片、时钟电路、复位电路和按键电路;
所述时钟电路、所述复位电路和所述按键电路分别与所述STM32F103C8T6芯片连接;
所述STM32F103C8T6芯片与驱动模块连接。
可选的,所述驱动模块包括MAX14808芯片和MAX9110时钟芯片
所述MAX9110时钟芯片与所述MAX14808芯片连接;
所述MAX14808芯片分别与所述控制模块和单轴式对置凹面阵列的六个扇区连接。
可选的,所述单轴式对置凹面阵列包括上凹面阵和下凹面阵、支撑架和多个超声振子;
所述上凹面阵和所述下凹面阵分别与所述支撑架的上端和下端连接;
所述上凹面阵和所述下凹面阵均相对应的均分为6个扇区;
多个所述超声振子按照内圈、中圈和外圈的三圈排列方式均匀排列在所述上凹面阵和所述下凹面阵的每个扇区内。
可选的,所述上凹面阵和所述下凹面阵上均分布有36个超声振子;
所述上凹面阵和所述下凹面阵的每个扇区的内圈、中圈和外圈分布的超声振子的数量分别为1、2和3。
根据本发明提供的具体实施例,本发明公开了以下技术效果:
本发明公开了一种单轴式对置凹面阵列六通道分区驱动控制装置,所述控制装置包括:控制模块、驱动模块、电源模块、六分区处理的单轴式对置凹面阵列;所述电源模块分别与所述控制模块和所述驱动模块的电源输入端连接,用于为所述控制模块和所述驱动模块提供直流电压;所述控制模块的信号输出端与所述驱动模块的信号输入端连接,所述控制模块用于输出六路脉冲调制信号至所述驱动模块;所述驱动模块的六路输出端口分别与单轴式对置凹面阵列的六个扇区连接,所述驱动模块用于将六路脉冲调制信号进行放大,并将放大后的六路脉冲调制信号分别输出给单轴式对置凹面阵列的六个扇区。本发明通过输出六路可控的脉冲调制信号,经放大后驱动单轴式对置凹面阵列的六个扇区,实现对悬浮物体在水平方向上的运动控制。
附图说明
为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对实施例中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动性的前提下,还可以根据这些附图获得其他的附图。
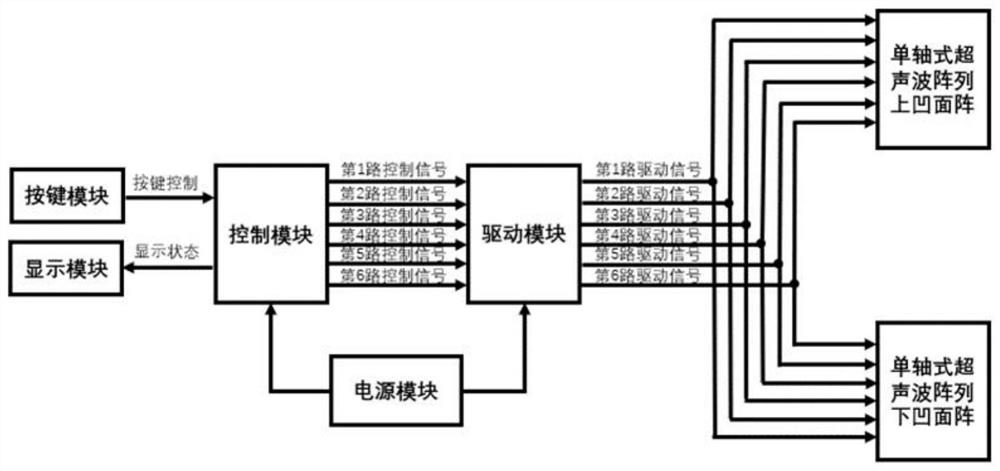
图1为本发明实施例中一种单轴式对置凹面阵列六通道分区驱动控制装置的系统框图;
图2为本发明实施例中一种单轴式对置凹面阵列六通道分区驱动控制装置的直流稳压电路原理图;
图3为本发明实施例中一种单轴式对置凹面阵列六通道分区驱动控制装置的±5V降压稳压电路原理图;
图4为本发明实施例中一种单轴式对置凹面阵列六通道分区驱动控制装置的+3.3V降压稳压电路原理图;
图5为本发明实施例中一种单轴式对置凹面阵列六通道分区驱动控制装置的控制模块的电路原理图;
图6为本发明实施例中一种单轴式对置凹面阵列六通道分区驱动控制装置的驱动模块的主芯片MAX14808的电路原理图;
图7为本发明实施例中一种单轴式对置凹面阵列六通道分区驱动控制装置的驱动模块的时钟模块电路原理图;
图8为本发明实施例中一种单轴式对置凹面阵列六通道分区驱动控制装置的驱动模块的滤波电容电路原理图;
图9为本发明实施例中一种单轴式对置凹面阵列六通道分区驱动控制装置的六路驱动信号与上凹面阵和下凹面阵分区之间的连接图;
图10为本发明实施例中一种单轴式对置凹面阵列六通道分区驱动控制装置的单轴式对置凹面阵列(不包含超声振子)的模型图;
图11为本发明实施例中一种用于单轴式对置凹面阵列六通道分区驱动控制装置的上凹面阵和下凹面阵的分区图。
具体实施方式
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
本发明的目的是提供一种单轴式对置凹面阵列六通道分区驱动控制装置,以实现利用单轴式对置凹面阵列实现对悬浮物体在水平方向的运动控制。
为使本发明的上述目的、特征和优点能够更加明显易懂,下面结合附图和具体实施方式对本发明作进一步详细的说明。
针对单轴式对置凹面阵列多控制物体在一维空间(竖直方向)中运动,存在可控范围小、可应用场景少等缺点,本发明采取对其分区改进方法,并通过六路信号驱动,使可控的运动范围由原来的一维空间扩展到二维空间(水平面),拓展了其应用场景。
图1,本发明所述的一种用于超声悬浮运动的单轴式对置凹面阵列六通道分区驱动控制装置包括控制模块、驱动模块、六分区处理的单轴式对置凹面阵列、按键模块、显示模块和电源模块。所述控制模块信号的输出端与装置的驱动信号输入端连接,控制模块的输出端口用来输出六路脉冲宽度调制信号,该脉冲宽度调制信号作为装置的原始驱动信号。所述驱动模块用于接收来自控制模块产生的六路原始脉冲信号,并将其放大之后输入到单轴式对置凹面阵列中,作为单轴式超声对置凹面阵列的驱动信号来源。
电源模块为控制模块和驱动模块提供驱动电压,控制模块为驱动模块提供六路占空比为50%、频率为40kHz的脉宽调制信号,驱动模块输出六路驱动信号,分别连接到单轴式对置凹面阵的上、下凹面阵列,通过按键可以实时调整悬浮物体的运动状态,实现物体在水平方向上的运动。
一、电源模块
所述电源模块包括直流稳压电路、第一降压稳压电路(±5V降压稳压电路)和第二降压稳压电路(3.3V降压稳压电路);
所述的直流稳压电路包括降压、整流、滤波、稳压环节,其中降压环节是幅值为220V交流电通过变压器降至幅值为±26V左右的正弦交流电;整流环节是由四个型号为1N4007的整流二极管搭建而成的桥式整流电路把幅值为±26V电压,滤波环节采用耐压值不低于40V的电解电容来稳压把±33V左右的单项脉冲电压转换成±33V的直流电压;稳压环节是经过LM7824和LM7924两种线性稳压器进行稳压,稳定到±24V直流电压。
参考图2,所述的直流稳压电路包括变压器、四只整流二极管1N4007构成的桥式整流电路、电解电容C61、C63、C65、C67和陶瓷电容C62、C64、C66、C68,以及线性稳压器LM7824和LM7924;变压器用于将幅值为220V的正弦交流电降至幅值为±26V的两种正弦交流电,桥式整流电路的两个输出端与分别与线性稳压器LM7824和LM7924连接;桥式整流电路的输入端与变压器的输出端相连接,变压器输出电压为正的一路与桥式电路的一个输入端相连接,变压器输出为负的一路与桥式电路的另一端相连接,经过桥式整流电路的整流作用之后,把其中输出电压为正的一路与线性稳压器LM7824相连接,输出电压为负电压的一路与线性稳压器LM7924相连接;电解电容C61的正极与整流桥输出为正电压的一路相连,C61的负极与GND相连接,陶瓷电容C62与C61并联,LM7824的输入端与C61的正极相连,电解电容C63的正极与LM7824的输出端相连接,陶瓷电容C64与C63并联,经此输出+24V电源;经过整流桥的负电压输出端与电解电容C65的负极相连接,陶瓷电容C66与C65并联,LM7924的输入端连接到电解电容C65的负极,C65正极接到GND端,电解电容C67的负极与LM7924的输出端相连接,C67的正极与GND相连,陶瓷电容C68与C67并联,经此,输出-24V电源。
±5V降压稳压电路和3.3V降压稳压电路,均是通过直流稳压电路得到的±24V电源降压所得。
参阅图3,±5V降压稳压电路,即第一降压稳压电路,包括线性稳压器LM7805、LM7905、电解电容C69、电解电容C70、电解电容C76、电解电容C77、陶瓷电容C71、陶瓷电容C78;降压稳压电路的+24V输出与电解电容C69正极相连接,再连接到LM7805的输入端,C69的负极接到GND,电解电容C70正极接到LM7805输出引脚,负极接到GND,陶瓷电容C71与C70并联;降压稳压电路的-24V输出与电解电容C76负极相连接,再连接到LM7905的输入端,C76的正极接到GND,电解电容C77负极接到LM7805输出引脚,C77正极接到GND,陶瓷电容C78与C77并联;经此,输出两种±5V电源。
参阅图4,3.3V降压稳压电路,即,第二降压稳压电路,包括AMS1117低压差线性稳压器、陶瓷电容C72、陶瓷电容C73、陶瓷电容C74、陶瓷电容C75;陶瓷电容C72并联在+5V和GND之间,陶瓷电容C73并联在C72两端,+5V电压输入连接到AMS1117的输入引脚,陶瓷电容C74并联在AMS1117输出端和GND之间,陶瓷电容C75并联在C74电容两端,经此,输出的电压为3.3V。
电源模块与控制模块以及驱动模块之间的关系如下:
电源模块提供±24V、±5V、3.3V,其中电源模块为控制模块提供3.3V电源,控制模块中的VDD与3.3V电源相连接;电源模块为驱动模块提供±24V、±5V、3.3V电压,驱动模块中的电源VPPA、电源VPPB与+24V电源相连接,电源VNNA、电源VNNB均与-24V电源相连接,电源VCC与+5V电源相连接,电源VEE与-5V电源相连接,电源VDD与3.3V相连接。
二、控制模块
所述的控制模块为以STM32F103C8T6为核心的最小系统,另有显示电路和按键电路。
参阅图5,图5中是整个系统的控制模块,STM32F103C8T6芯片的PA2引脚与驱动芯片的INP1引脚相连接,STM32F103C8T6芯片的PA3引脚与驱动芯片的INP2引脚相连接,STM32F103C8T6芯片的PA6引脚与驱动芯片的INP3引脚相连接,STM32F103C8T6芯片的PA7引脚与驱动芯片的INP4引脚相连接,STM32F103C8T6芯片的PB0引脚与驱动芯片的INP5引脚相连接,STM32F103C8T6芯片的PB1引脚与驱动芯片的INP6引脚相连接;振荡电路为:并联在OSCIIN引脚和OSCOUT引脚电阻R53,一个8M的晶体振荡器并联在电阻R53两端,在晶体振荡器两个引脚与GND之间分别串联两个电容C55、C56;电源电路中降压稳压电路输出3.3V经过电容C54的滤波之后输入到STM32F103C8T6芯片的VDD;3.3V稳压电源与电阻R45的一端相连接,R45的另一端与复位按键RESET的一端相连接,RESET的另一端接地,电容C48并联在复位按键RESET的两端,RESET的非接地端与STM32F103C8T6芯片的NEST引脚相连接,作为控制模块的复位电路;按键KEY1的一端与PB13引脚通过电线相连,KEY1的另一端与GND相连,按键KEY2的一端与PB14引脚通过电线相连,KEY2的另一端与GND相连,按键KEY3的一端与PB10引脚通过电线相连,KEY3的另一端与GND相连,按键KEY4的一端与PB11引脚通过电线相连,KEY4的另一端与GND相连,以上作为控制模块的按键控制电路;显示单元采用含有6个引脚的OLED显示屏幕,STM32F103C8T6的PB6引脚与显示单元的D0相连接,PB7引脚与显示单元的D1相连接,PB8引脚与显示单元的RES相连接,PB9引脚与显示单元的DC相连接,显示单元的VDD引脚与降压稳压电路3.3V相连,显示单元的GND引脚与GND相连接,以上作为控制模块的显示单元。
三、驱动模块
参阅图6、图7、图8,所述的驱动模块包含主芯片MAX14808芯片、时钟芯片MAX9110、以及一些滤波电容;降压稳压电路的3.3V经过电容C18的滤波接到MAX14808芯片的VDD引脚上;降压稳压电路的+5V经过电容C17的滤波之后,与MAX14808芯片的VCC引脚相连接;降压稳压电路的-5V经过电容C16的滤波,与MAX14808芯片的VEE引脚相连接;MAX14808芯片的
四、单轴式对置凹面阵列模块
参阅图9、图10及图11,所述单轴式对置凹面阵列模块包括上凹面阵11、下凹面阵14、支撑架12和超声振子,图10中的标号13指向的位置为超声振子安装位置,每个凹面阵均有36个相同的超声振子安装位置,最内圈有6个超声振子,中圈有12个超声振子,外圈有18个超声振子;按照每60°为一个分区,将上、下凹面阵分成同样的六个分区,如图11所示上下凹面阵相同分区所在位置相对;每个小扇区内,内圈有1个超声振子、中圈有2个超声振子、外圈有3个超声振子;如图9和11所示,驱动模块MAX14808芯片的OUT5端口与上、下凹面阵的一号扇区通过电线相连接,驱动模块MAX14808芯片的OUT3端口与上、下凹面阵的二号扇区通过电线相连接,驱动模块MAX14808芯片的OUT1端口与上、下凹面阵的三号扇区通过电线相连接,驱动模块MAX14808芯片的OUT6端口与上、下凹面阵的四号扇区通过电线相连接,驱动模块MAX14808芯片的OUT4端口与上、下凹面阵的五号扇区通过电线相连接,驱动模块MAX14808芯片的OUT2端口与上、下凹面阵的六号扇区通过电线相连接。
本发明提供的一种单轴式对置凹面阵列六通道分区驱动控制装置的工作原理简述如下:
1、开始,将220V正弦交流电接入到直流稳压电路,输出±24V的直流电压,再将±24V的直流电压接入到降压稳压电路,输出±5V的直流电压,再将+5V的直流电源降压至3.3V;输出的3.3V电源为控制电路供电,输出的±24V、±5V、3.3V电源为驱动电路供电。
2、STM32F103C8T6芯片产生6路占空比为50%的脉宽调制信号,输出引脚PA2、PA3、PA6、PA7、PB0、PB1分别接入到驱动模块的输入通道1到通道6;可以通过按键KEY1、KEY2、KEY3、KEY4,四个按键来控制悬浮物体在水平面内两个方向上运动,通过OLED显示模块实时显示当前位置。
3、驱动芯片将接收到的6路脉宽调制信号进行放大,由OUT1~OUT6输出,再依据图9所示的接线方式连接,使驱动信号与经过分区的单轴式对置凹面阵连接,即完成装置的整体连接。
本发明可以带来如下效果:
1、本发明提出的一种单轴式对置凹面阵列六通道分区驱动控制装置对常见的单轴式对置凹面阵进行分区处理,极大地增强了对悬浮物体的运动控制;
2、本发明通过六路驱动信号与经过分区处理的单轴式对置凹面阵进行连接,达到了控制悬浮物体在水平面内两个方向(夹角为120°)上的前后移动;
3、本发明提出的一种单轴式对置凹面阵列六通道分区驱动控制装置可以较好地实现对单个聚氯乙烯小球和多个聚氯乙烯小球的悬浮和在水平面内的移动控制;
4、本发明提出的一种单轴式对置凹面阵列六通道分区驱动控制装置可以通过改变六个通道的控制信号相位来实时改变悬浮物体的运动状态,拓展了单轴式对置凹面阵的应用场景。
本说明书中各个实施例采用递进的方式描述,每个实施例重点说明的都是与其他实施例的不同之处,各个实施例之间相同相似部分互相参见即可。
本文中应用了具体个例对本发明的原理及实施方式进行了阐述,以上实施例的说明只是用于帮助理解本发明的方法及其核心思想;同时,对于本领域的一般技术人员,依据本发明的思想,在具体实施方式及应用范围上均会有改变之处。综上所述,本说明书内容不应理解为对本发明的限制。