旋转式清洗设备
文献发布时间:2023-06-19 09:26:02
技术领域
本发明涉及清洗设备技术领域,更具体涉及一种旋转式清洗设备。
背景技术
目前,对杯体的表面进行清洗时通常采用超声波清洗工艺予以实现。超声波(Ultrasonic)是频率高于20KHz的声波,其具有方向性好,穿透能力强,易于获得较集中的声能,在水中传播距离远,可用于测距、测速、清洗、焊接、碎石、杀菌消毒等,在医学、军事、工业、农业上有很多的应用。利用超声波对杯体等待清洗的工件进行清洗的原理主要是通过换能器,将功率超声频源的声能转换成机械振动,通过清洗槽壁将超声波辐射到槽中的清洗液。由于受到超声波的辐射,使槽内液体中的微气泡能够在声波的作用下从而保持振动。破坏污物与清洗件表面的吸附,引起污物层的疲劳破坏而被剥离,气体型气泡的振动对固体表面进行擦洗。
申请人经过仔细检索后发现公开号为CN108435700A的中国发明专利公开了一种旋转式超声波清洗机。现有技术中,诸如此类结构的清洗机通常为直线型结构,因此存在占地面积偏大的缺陷;同时,由于直线型结构的超声波清洗机的框架、钣金覆盖件通常需要耗费更多的原材料,因此上述现有技术也存在制造成本明显较高及结构复杂等缺陷。
其次,申请人指出上述现有技术中的第二容器包括容器本体、设于容器本体两侧的两转动轮、沿其自身轴向穿设于转动轮的轴心处的转动轴,第二容器能够绕转动轴的轴线方向旋转,转动轴的转动轴线沿水平方向延伸且垂直送料方向。该第二容器表面镂空。因此,其所披露的“旋转式”是将第二容器沿其容器本体轴向穿设于转动轮的轴心处的转动轴进行水平转动。申请人指出该现有技术在第二容器旋转过程中会对容置于第二容器的待清洗工件的表面造成划伤或者磕碰等产品缺陷,由此导致对待清洗工件的清洗效果不佳,并存在较为严重的设计缺陷。此外,诸如公告号为CN203803843U的中国实用新型专利也存在上述诸多缺陷。
有鉴于此,有必要对现有技术中的传统的超声波清洗设备予以改进,以解决上述问题。
发明内容
本发明的目的在于公开一种旋转式清洗设备,用以解决传统的超声波清洗设备所存在诸多缺陷,尤其是为了降低设备的占地面积,降低设备的制造成本,避免对待清洗的工件在清洗过程中造成表面划伤、磕碰等缺陷,并简化待清洗的工件在清洗机的各个清洗槽中执行切换操作的简便性及可靠性。
为实现上述目的,本发明提供了一种旋转式清洗设备,包括:
环形首尾连接并通过隔板相互隔离的若干清洗槽,
第一回转圆盘,
用于驱动第一回转圆盘执行水平转动的第一动力机构,
设置于第一回转圆盘上方并执行水平往复运动的第二动力机构,所述第二动力机构设置与隔板的数量相匹配的第三动力机构;
环布于所述第一回转圆盘边缘处且呈垂直设置的若干引导柱,并在所述引导柱的外侧设置滑动机构;
所述第三动力机构驱动所述滑动机构上下运动,以执行跨越相邻清洗槽的操作,并在工件篮完成跨越相邻清洗槽的操作后由所述第二动力机构整体驱动第三动力机构水平转动复位。
作为本发明的进一步改进,所述滑动机构沿径向向外的方向设置钩持部,所述第三动力机构沿其垂直方向上的末端配置作伸缩运动并提升所述钩持部的牵引件。
作为本发明的进一步改进,所述第三动力机构的牵引件提升所述钩持部的过程中至少形成提升工件篮至高于隔板的状态。
作为本发明的进一步改进,所述滑动机构的底部设置滑动件,所述滑动件在第一回转圆盘转动过程中被所导引,所述引导柱的外侧设置滑动机构的底部连接工件篮,所述工件篮在清洗槽内作环形水平移动。
作为本发明的进一步改进,所述第一回转圆盘悬置于清洗槽的上方;
所述旋转式清洗设备还包括:设置于清洗槽上方的顶板;
所述第二动力机构设置于第一回转圆盘上方并执行水平往复运动,所述顶板开设供第三动力机构贯穿并作弧形往复运动的通孔。
作为本发明的进一步改进,所述通孔覆盖至少两个引导柱,所述清洗槽在俯视角度下呈扇环状,并至少在其中一个清洗槽的底部和/或侧部设置超声波发生器。
作为本发明的进一步改进,部分相邻的通孔沿弧形方向连通。
作为本发明的进一步改进,相邻的通孔均沿弧形方向连通,以形成供第三动力机构贯穿并作弧形往复运动的圆环通孔。
作为本发明的进一步改进,所述滑动机构包括:与引导柱滑动连接的滑动座,连接工件篮的吊臂,以及设置于吊臂顶部并沿径向向外的方向设置钩持部。
作为本发明的进一步改进,所述旋转式清洗设备还包括:
整体遮蔽清洗槽、第一回转圆盘及第一动力机构的壳体,所述顶板为壳体的一部分,所述顶板设置至少一个用于抽吸水汽的抽气口;
所述壳体嵌设透明状的覆盖件。
作为本发明的进一步改进,
所述第一动力机构包括:同轴装配的第一电机、减速器与蜗轮;所述第一回转圆盘的圆心处垂直设置与所述蜗轮啮合的蜗杆;
所述第二动力机构包括:垂直同轴配置的第二电机、设置于顶板上的回转装置,以及设置于回转装置与第二电机之间的第二回转圆盘,所述第二回转圆盘的边缘设置与隔板的数量相匹配的第三动力机构;
所述第三动力机构被配置为气缸、油缸或者直线电机。
作为本发明的进一步改进,所述回转装置由与顶板连接的外圈以及与第二回转圆盘连接的具内齿圈的内圈组成;
所述第二电机配置与内齿圈啮合的驱动齿轮。
与现有技术相比,本发明的有益效果是:
首先,将多个清洗槽围合呈环形,多个工件篮承载待清洗的工件在多个清洗槽中旋转,显著地降低了本发明所示出的清洗设备的占地面积,同时相对于传统的直线型的清洗机更能够降低框架及钣金件的用量,从而显著地降低了制造成本;
其次,待处理的工件被工件篮所固定,且在整个清洗过程中以环形平移姿态进行运动,因此有效地避免了对待清洗的工件在清洗过程中所可能造成的表面划伤、磕碰等缺陷;
最后,通过第三动力机构驱动所述滑动机构上下运动,以执行跨越相邻清洗槽的操作,并在工件篮完成跨越相邻清洗槽的操作后由所述第二动力机构整体驱动第三动力机构水平转动复位,仅需要与隔板数量相等的第三动力机构即可实现对工件篮的跨槽操作,由此简化了结构,提高了该旋转式清洗设备的可靠性与运行的稳定性。
附图说明
图1为本发明示出的旋转式清洗设备的内部结构示意图;
图2为本发明示出的旋转式清洗设备的侧视图;
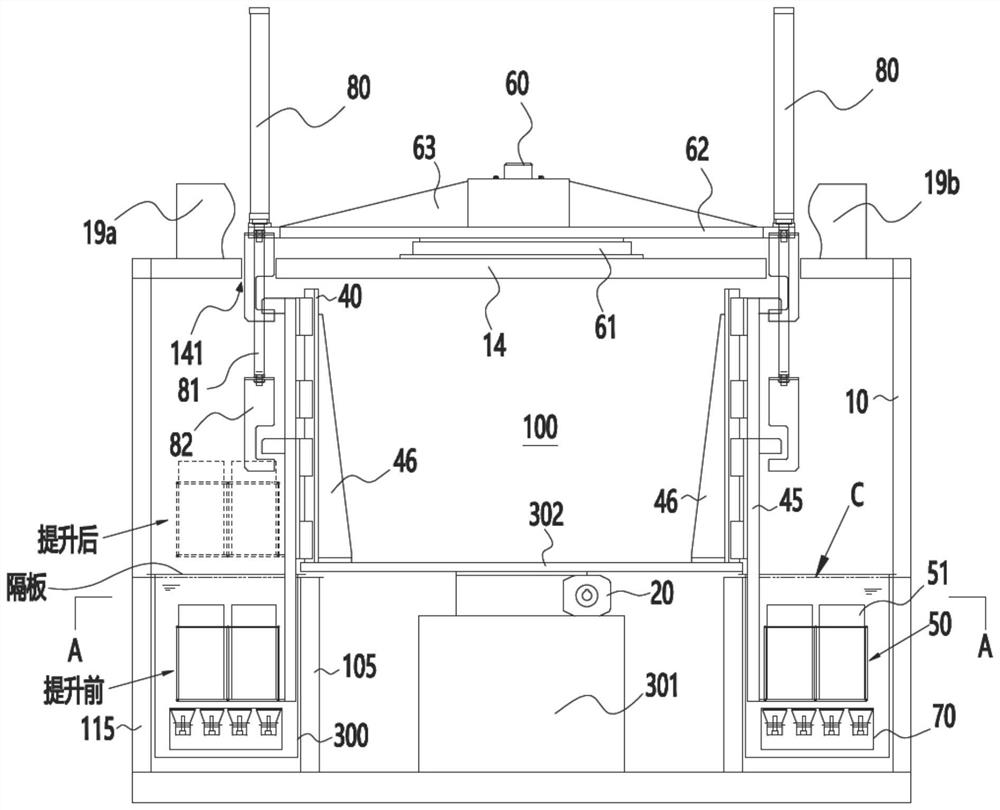
图3为沿图1中A-A向的剖视图;
图4为省略第二动力机构及第三动力机构的俯视图;
图5为在图3中省略工件篮、引导柱及第三动力机构的俯视图,工件篮可以在四个首尾连接并相互隔离的清洗槽中旋转并执行设定的清洗处理;
图6为与旋转式清洗设备所配合使用的烘干设备的俯视图;
图7为沿图6中D-D向的剖视图;
图8为通过气缸提升工件篮以从前道清洗理槽跨越隔板并进入后道清洗槽的整个过程的示意图;其中,实线部分为气缸驱动工件篮下降并完全浸没在清洗槽中的状态,虚线部分为气缸提升工件篮至最高点并使得工件篮完全提升至清洗槽液面上方的状态;
图9为工件篮与引导柱装配的示意图;
图10为在水平方向中以径向向内的视角示出图9中的工件篮与引导柱装配的示意图;
图11为设置于旋转式清洗设备顶部的第二动力机构所包含的回转装置的俯视图;
图12为沿图11中E-E向的剖视图;
图13为引导柱连接工件篮在一种实施例中的示意图;
图14为引导柱连接工件篮在另一种实施例中的示意图;
图15为基于图14所示出的实施例中与引导柱连接的滑动机构在围合清洗槽的内侧壁上滚动的示意图;
图16为本发明示出的旋转式清洗设备在再一种实施例中的示意图;
图17为本发明示出的旋转式清洗设备在最后一种实施例中的示意图。
具体实施方式
下面结合附图所示的各实施方式对本发明进行详细说明,但应当说明的是,这些实施方式并非对本发明的限制,本领域普通技术人员根据这些实施方式所作的功能、方法、或者结构上的等效变换或替代,均属于本发明的保护范围之内。
在本发明的描述中,需要理解的是,术语“中心”、“纵向”、“横向”、“长度”、“宽度”、“厚度”、“上”、“下”、“前”、“后”、“左”、“右”、“竖直”、“水平”、“顶”、“底”“内”、“外”、“顺时针”、“逆时针”、“轴向”、“径向”、“周向”、“正方向”、“负方向”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制。
同时,在本申请各个实施例中,术语“
参图1至图13所揭示的本发明旋转式清洗设备的一种具体实施方式。
本实施例所示出的旋转式清洗设备优选地用于对杯体进行清洗。在本实施例中,杯体泛指具有一个开口端并呈柱状的工件,例如玻璃杯、不锈钢杯、陶瓷杯等。杯体在成形后可通过本实施例所示出的旋转式清洗设备进行清洗。该杯体可以是有底筒状的工件,也可以为无底筒状的工件,也可为其他能够被工件篮50所收容的工件51。
工件51优选地从工件篮50顶部的开口处被放入。工件51并非必须与工件篮50完全贴合,因为工件篮50在多个清洗槽执行清洗处理的过程中始终以平移姿态进行转动,因此不会对工件篮50中所盛放的工件51在清洗过程中造成划伤或者磕碰,从而提高了对工件51的清洗处理质量。
具体的,参图1所示,在本实施例中,一种旋转式清洗设备,包括:
环形首尾连接并通过隔板相互隔离的若干清洗槽,每个清洗槽由不锈钢板材制成,清洗槽的槽壁300环形布置于第一回转圆盘302的圆周处。
第一回转圆盘302,
用于驱动第一回转圆盘302执行水平转动的第一动力机构,
设置于第一回转圆盘302上方并执行水平往复运动的第二动力机构,所述第二动力机构设置与隔板的数量相匹配的第三动力机构80,
环布于所述第一回转圆盘302边缘处且呈垂直设置的若干引导柱40,并在所述引导柱40的外侧设置滑动机构,第三动力机构80驱动所述滑动机构上下运动,以执行跨越相邻清洗槽的操作,并在工件篮50完成跨越相邻清洗槽的操作后由所述第二动力机构整体驱动第三动力机构80水平转动复位。在本实施例中,前述“外侧”是指以第一回转圆盘302的圆心为基准点,沿第一回转圆盘302的径向向外的方向定义为所述“外侧”。
参图1与图3所示,在本实施例中,第一回转圆盘302与第二回转圆盘62均呈圆形。第一动力机构包括:同轴装配的第一电机20、减速器21与蜗轮22。所述第一回转圆盘302的圆心处垂直设置与所述蜗轮22啮合的蜗杆30,以通过蜗杆30驱动第一回转圆盘302在水平方向上转动,并具体为沿沿图3中箭头B所示出的方向作顺时针转动,第一回转圆盘302转动一周(或者数周)以完成对工件51的清洗处理。工件篮50具有镂空结构,以便于清洗液充分浸润工件51的内表面与外表面。第一动力机构设置于第一回转圆盘302的下方,并固定设置于承台301上。第一回转圆盘302只能在设定高度上作周转运动,而不能沿垂直方向作升级运动。
参图6、图7所示,本发明实施例中旋转式清洗设备所包含的机架、型材、壳体10为不锈钢型材。清洗槽11、清洗槽12、清洗槽13及清洗槽14均采用SUS304不锈钢制成。同时,参图2所示,壳体10的上部设置透明状的覆盖件101,以便于观察操作者观察装载工件51的工件篮50在各个清洗槽的处理情况。壳体10的底部设置可开启的柜门102,用于对第一动力机构、PLC控制装置及其他元器件进行安装与检修。
参图1至图3所示,旋转式清洗设备还包括部分遮蔽清洗槽的壳体10,并在壳体10的顶部设置至少一个用于抽吸水汽的抽气口,即抽气口19a与抽气口19b。清洗槽中的液体通常要加热处理,以提高对工件51的清洗效果。因此会在壳体10的内部产生水蒸气。水蒸气遇到透明状的覆盖件101及壳体10的顶部(即顶板14)会产生水雾,因此可通过抽气口19a与抽气口19b将各个清洗槽所产生的水蒸气排出壳体10。抽气口19a与抽气口19b可与通过柔性管道或者刚性管道连接排湿风机(未示出),以执行抽气操作。
在本实施例中,烘干设备90的投入口911靠近旋转式清洗设备的出料口(未示出)相互靠近。操作人员可将通过该旋转式清洗设备执行超声波清洗处理后的工件51从烘干设备90的投入口911投放至烘干设备90中进行烘干处理,并最终从烘干设备90的流出口921导出烘干后的工件51。
参图6与图7所示,在本实施例中,该烘干设备90包括形成烘干通道951的烘干壳体95,水平横置于烘干壳体95的若干转轴91,转轴91位于烘干通道951的两端端部套设链轮94,设置于链轮94并作周转运动的输送带941,输送带941承载工件51,设置于输送带941下方的加热棒92,以及设置于烘干壳体95的底部并与烘干通道951连通的循环风机93。转轴91的一端端部延伸过烘干壳体95并通过外部动力机构(例如电机)及传动件(例如链条或者皮带)驱动转轴91转动,从而最终通过链轮94驱动输送带941在烘干通道951内作周转运动。在本实施例中,对烘干通道951的加热方式采用电加热,可通过加热棒92将冷空气加热为热空气,通过循环风机93将热空气进行热风循环,热空气向上流动,以对工件51进行加热并彻底烘干工件51。
参图1所示,该旋转式清洗设备可与烘干设备90配合使用,并对执行清洗后的工件51执行烘干处理,图6与图7所示出的烘干设备90也可作为旋转式清洗设备的一部分,也可作为一个独立的装置予以单独使用。烘干设备90贴合该旋转式清洗设备进行布置。
参图3至图5所示,在本实施例中,该旋转式清洗设备包含环形首尾连接并相互隔离的四个清洗槽,即清洗槽11,清洗槽12、清洗槽13及清洗槽14。清洗槽13与清洗槽12之间通过隔板17隔离,清洗槽12与清洗槽11之间通过隔板16隔离,清洗槽11与清洗槽14之间通过隔板15隔离,清洗槽14与清洗槽13之间通过隔板18隔离。当然,清洗槽的数量及沿环形方向的长度可根据工件51的清洗工艺的需要进行灵活设定。清洗槽的数量可为两个、三个、四个或者更多。
在本实施例中,申请人以四个清洗槽(清洗槽11、12、13、14)为例予以示范性说明。第一动力机构驱动该第一回转圆盘302沿图3中箭头B所示出的顺时针方向运动,从而将多个工件篮50依次被清洗槽13、清洗槽12、清洗槽11及清洗槽14所浸润并执行对应的清洗处理工艺。
清洗槽11、清洗槽12、清洗槽13及清洗槽14在俯视角度下呈扇环状,并至少在其中一个清洗槽的底部和/或侧部设置超声波发生器70。超声波发生器70将功率超声频源的声能转换为机械振动,通过清洗槽的槽壁300将超声波辐射到槽中的清洗液中。由于受到超声波的辐射,使槽内液体中的微气泡能够在声波的作用下从而保持振动。破坏污物与清洗件表面的吸附,引起污物层的疲劳破坏而被剥离,气体型气泡的振动对工件51的表面进行清洁处理。
具体的,参图4与图5所示,清洗槽13为最先开始执行清洗处理的第一个清洗槽,清洗槽12的底部设置超声波发生器(配合参图1所示),并可在清洗槽12中添加精洗药液,以通过精洗药液对工件51进行超声波清洗。清洗槽12为第二道处理的清洗槽,并同样可在清洗槽12的底部设置超声波发生器70,清洗槽12中盛放清水,从而在清洗槽12中执行超声波漂洗处理。然后,工件篮50携带工件51在清洗槽11中执行超声波漂洗处理。最后,工件篮50携带工件51在清洗槽14中执行鼓泡漂洗处理。
每个工件篮50中的工件51完全浸润在清洗槽13中执行超声波清洗的时间保持在30秒左右,每个工件篮50中的工件51完全浸润在清洗槽12中执行超声波漂洗处理的时间保持在25秒左右,每个工件篮50中的工件51完全浸润在清洗槽11中执行超声波漂洗处理的时间保持在20秒左右,每个工件篮50中的工件51完全浸润在清洗槽14中执行鼓泡漂洗处理的时间保持在15秒左右。至于每个清洗槽的清洗时间的长度可根据实际需要进行调节,通过提高或者降低电机20的转速,甚至中止电机20的转动,以实现对各个清洗槽对浸没在液体中的工件51的处理时长的灵活调整。
该旋转式清洗设备包含二十四组工件篮50及导引工件篮50的二十四个引导柱40。引导柱40环布于第一回转圆盘302边缘处且呈垂直设置。引导柱40的径向向内的方向配置径向向外布置的导轨41。二十四个导轨41均呈放射状环形布置。引导柱40径向向内的方向设置三角形的加强件46,加强件46与第一回转圆盘302为一体式连接。工件篮50设置两个收容工件51的工位,工件篮50的长度与清洗槽11~清洗槽14沿径向方向上的宽度相互匹配。需要说明的是,在实际制造及使用场景中,可根据需要将工件篮50的横向长度(当位于各个清洗槽时,其横向长度沿径向向外的方式予以布置),以装载数量更多的工件51。在本实施例中,清洗槽13对于清洗槽12相当于“前道清洗槽”,清洗槽12对于清洗槽13相当于“后道清洗槽”,并以此类推。
结合图13所示,在本实施例中,该滑动机构包括:与引导柱40滑动连接的滑动座42,连接工件篮50的吊臂45,以及设置于吊臂45顶部并沿径向向外的方向设置钩持部451。第一回转圆盘302边缘处配置二十四个垂直设置的引导柱40。每一个引导柱40径向向外的方向设置垂直布置的直线导轨41,滑动座42整体包裹直线导轨41。滑动座42的内侧与直线导轨41之间设置滚珠402,从而使得滑动座42能够在垂直方向上相对于引导柱40作直线型的上升与下降运动。滑动座42的数量为一个或者两个或者更多。滑动座42连接吊臂45。
同时,结合图9至图10所示,该滑动机构沿径向向外的方向设置钩持部451,所述第三动力机构80沿其垂直方向上的末端配置作伸缩运动并提升所述钩持部451的牵引件82。第三动力机构80被配置为气缸、油缸或者直线电机,在本实施例中,将第三动力机构80配置为气缸,并予以示范性说明。气缸设置沿垂直方向上作伸缩运动的连杆81,牵引件82设置于连杆81的末端,从而通过连杆81的伸缩运动,以对设置于吊臂45末端的工件篮50执行升降运动。
第三动力机构80的牵引件82提升所述钩持部451的过程中至少形成提升工件篮50至高于隔板15、隔板16、隔板17及隔板18的状态。在本实施例中,隔板15至隔板18在垂直方向上的高度一致。引导柱40的外侧设置滑动机构的底部连接工件篮50,工件篮50在清洗槽内沿箭头B所示出的方向作环形水平移动。此时,工件篮50及容置于工件篮50中的工件51均位于各个清洗槽的液面C下方,以保证被液体所充分浸润。隔板15、隔板16、隔板17及隔板18的高度均高于清洗槽的液面C的位置。
参图1及图2所示,在本实施例中,该旋转式清洗设备还包括:整体遮蔽清洗槽、第一回转圆盘302及第一动力机构的壳体10,所述顶板14为壳体10的一部分。
在本实施例中,第一回转圆盘302悬置于清洗槽的上方。旋转式清洗设备还包括:设置于清洗槽上方的顶板14。第二动力机构设置于第一回转圆盘302上方并执行水平往复运动,顶板14开设供第三动力机构80(即气缸)贯穿并作弧形往复运动的通孔141。如图4所示,通孔141具体为环形布置的通孔141a、通孔141b、通孔141c及通孔141d。
参图4与图5所示,通孔141覆盖至少两个引导柱40,清洗槽11、清洗槽12、清洗槽13及清洗槽14在俯视角度下呈扇环状,并至少在其中一个清洗槽的底部和/或侧部设置一个或者多个超声波发生器70。第一回转圆盘302顺时针转动时,引导柱40所滑动连接的工件篮50(通过吊臂45连接)位于最低点附近,并随第一回转圆盘302的转动而在各个清洗槽中沿水平方向上作弧形平移运动。当需要对工件篮50执行跨槽操作时,气缸在第二动力机构的驱动下,在图5中的区域15P、区域16P、区域17P及区域18P中执行水平方向的往复运动。在本申请中,“切换操作”与“跨槽操作”具等同技术含义。
参图8所示,申请人以工件篮50从清洗槽13跨越至清洗槽12的整个过程予以详细阐述。首先,第二电机60驱动第二回转圆盘62逆时针转动,以驱动气缸移动至初始位置。将气缸的牵引件82向下伸长并位于位置82b,与待执行跨槽操作的工件篮50连接的吊臂45水平顺时针转动至图8的位置45b中;然后,气缸的牵引件82钩持该待执行跨槽操作的工件篮50连接的吊臂45的钩持部451,并向上提升至虚线所示出的位置中,由此将牵引件82运动至位置82a,此时吊臂45向上运动至图8的位置45a中。在此过程中,吊臂45被垂直提升的距离为H,亦即整个工件篮50也被提升了H的距离。此时,被执行跨槽操作的工件篮50的底部至少高于前道清洗槽(即清洗槽13)与后道清洗槽(即清洗槽12)之间的隔板17的高度。然后,通过第二电机60驱动第二回转圆盘62,并执行顺时针转动,并跨越隔板17。然后,第三动力机构80(例如气缸)垂直向下伸长连杆81,随着第一动力机构的进一步的顺时针转动,牵引件82从钩持部451中横向脱开,并将提起的工件篮50沿图8中虚线所所示出的位置变化至实线所示出的位置,在此过程中工件篮50被降低了H的距离,并完全浸没在清洗槽12中。当工件篮50已经跨越至清洗槽12后,牵引件82向上缩回,然后,通过第二动力机构逆时针转动,以将牵引件82重新复位至靠近隔板17的前道清洗槽(即清洗槽13)中,以对下一个与引导柱40滑动连接的吊臂45末端所连接的工件篮50执行跨槽操作,并对整个二十四个引导柱40及其滑动连接的工件篮50执行连续的跨槽操作。因此,在整个跨越相邻两个清洗槽的过程中,第一回转圆盘302始终以设定的方向进行转动,而第二回转圆盘62则需要在对指定的工件篮50执行跨槽操作时依次执行下降运动-上升运动-顺时针转动-下降运动-上升运动-逆时针转动(复位至初始位置),并周而复始的执行上述运动。
参图1、图2、图11及图12所示,在本实施例中,该第二动力机构包括:沿垂直方向呈垂直同轴配置的第二电机60、设置于顶板14上的回转装置61,以及设置于回转装置61与第二电机60之间的第二回转圆盘62,第二回转圆盘62的边缘设置与隔板的数量相匹配的第三动力机构80。
在本实施例中,第一电机20与第二电机60可采用直流电机或者伺服电机或者步进电机。回转装置61由与顶板14连接的外圈611以及与第二回转圆盘62连接的具内齿圈6121的内圈612组成。第二电机60配置与内齿圈6121啮合的驱动齿轮(未示出),以通过第二电机60配置的驱动齿轮直接驱动内圈612转动,外圈611与顶板14固定,从而通过第二电机60的正反转,驱动第二回转圆盘62执行顺时针转动与逆时针转动。
虽然在图1中将第一动力机构设置于第一回转圆盘302的下方予以具体示出,申请人指出还可将第一动力机构设置于第一回转圆盘302的上方,甚至可直接将第一动力机构中的电机20的输出轴直接以垂直姿态驱动第一回转圆盘302,以驱动第一回转圆盘302执行顺时针运动。
本实施例所揭示的旋转式清洗设备通过第一动力机构、第二动力机构及四个第三动力机构,在每个工件篮50执行跨越相邻两个清洗槽的操作时,第三动力机构80驱动滑动机构上下运动,以执行跨越相邻清洗槽的操作,并在工件篮50完成跨越相邻清洗槽的操作后由所述第二动力机构整体驱动第三动力机构80水平转动复位。
因此,通过本实施例所揭示的旋转式清洗设备极大地简化了待清洗的工件在旋转式清洗设备的各个清洗槽中执行切换操作的简便性及可靠性,进一步降低了整个旋转式清洗设备的可靠性与制造成本,使得整个旋转式清洗设备的结构更加合理且紧凑。
同时,未被执行跨槽操作的工件篮50仍然完全浸没在清洗槽的液体中,从而避免了现有技术中旋转式清洗装置在需要进行切换清洗槽时需要整体将地将多个工件篮50整体提升并执行跨槽所导致的处理效果不理想的问题;
尤其的,通过本实施例所揭示的技术方案,能够尽可能地延长工件51浸没在各个清洗槽的液体中的时间,避免工件51不必要的暴露在空气中的问题,从而确保了工件51被浸没在液体中执行超声波清洗及漂洗处理,并最终提高了对工件51的清洗效果。
参图14至图15所示,本实施例示出了该旋转式清洗装置的另一种具体实施方式。
在本实施例中,滑动机构包括:与引导柱40滑动连接的滑动座42(数量为两个),嵌入滑动座42并向下延伸设置的顶板442,以及连接工件篮50的吊臂45。顶板442的底部横向装配所述滑动件44,工件篮50在清洗槽11、清洗槽12、清洗槽13及清洗槽14内作环形水平移动。
顶板442向下凸伸出滑动座42的下方,并在顶板442的底部横向设置轴部442,轴部442套设滑动件44。具体的,该滑动件44可选自轴承、尼龙滚轮等现有技术中能够与环形滚动面1161相互滚动的组件。引导柱40径向向外的方向设置垂直布置的直线导轨41,滑动座42整体包裹直线导轨41。滑动座42的内侧与直线导轨41之间设置滚珠402,从而使得滑动座42能够在垂直方向上相对于引导柱40作直线型的上升与下降运动。环形滚动面1161的宽度大于或者等于滑动件44的宽度。更优选的,环形滚动面1161还可在内外侧设置圆形的凸起部(未示出),从而对滑动件44起到更好的导向作用。
当然,也可将滑动件44整体嵌入顶板442的底部,并通过滑动件44接触环形滚动面1161。第一动力机构驱动第一回转圆盘302转动,并确保二十四个工件篮50所连接的滑动机构的滑动件44均与内槽壁105顶部形成的环形滚动面1161同时接触并滚动,从而降低了第一回转圆盘302转动时的阻力。
本实施例所揭示的旋转式清洗设备与实施例一中相同部分的技术方案,请参实施例一所述,在此不再赘述。
参图16及图17所示,本实施例所揭示的旋转式清洗装置与实施例一和/或实施例二所揭示的所揭示的旋转式清洗设备相比,其主要区别在于,在本实施例中,顶板14上部分相邻的通孔141沿弧形方向连通。即,相当于将图4中的通孔141d与通孔141a沿第一回转圆盘302的圆周处连通,以形成通孔141e,通孔141e呈扇环形;将图4中的通孔141b与通孔141c沿第一回转圆盘302的圆周处连通,以形成通孔141f,通孔141f呈扇环形。而此时仅需要配置两个气缸(第三动力机构的一种具体实现方式)即可实现对清洗槽13、清洗槽12及清洗槽11之间的跨槽操作,以及对清洗槽11及清洗槽14之间的跨槽操作,由此进一步降低配置第三动力机构的数量。
参图17所示,进一步优选为相邻的通孔141均沿弧形方向连通,以形成供第三动力机构80贯穿并作弧形往复运动的圆环通孔141g。而此时仅需要配置一个气缸(第三动力机构的一种具体实现方式)即可实现对清洗槽13、清洗槽12、清洗槽11及清洗槽14之间的跨槽操作,并进一步降低第三动力机构的数量。
本实施例所揭示的所揭示的旋转式清洗设备与实施例一和/或实施例二中相同部分的技术方案,请参实施例一和/或实施例二所述,在此不再赘述。
上文所列出的一系列的详细说明仅仅是针对本发明的可行性实施方式的具体说明,它们并非用以限制本发明的保护范围,凡未脱离本发明技艺精神所作的等效实施方式或变更均应包含在本发明的保护范围之内。
对于本领域技术人员而言,显然本发明不限于上述示范性实施例的细节,而且在不背离本发明的精神或基本特征的情况下,能够以其他的具体形式实现本发明。因此,无论从哪一点来看,均应将实施例看作是示范性的,而且是非限制性的,本发明的范围由所附权利要求而不是上述说明限定,因此旨在将落在权利要求的等同要件的含义和范围内的所有变化囊括在本发明内。不应将权利要求中的任何附图标记视为限制所涉及的权利要求。
此外,应当理解,虽然本说明书按照实施方式加以描述,但并非每个实施方式仅包含一个独立的技术方案,说明书的这种叙述方式仅仅是为清楚起见,本领域技术人员应当将说明书作为一个整体,各实施例中的技术方案也可以经适当组合,形成本领域技术人员可以理解的其他实施方式。