一种激光清洗淬火装置及其工作方法
文献发布时间:2023-06-19 13:48:08
技术领域
本发明涉及激光加工的技术领域,尤其涉及一种激光清洗淬火装置及工作方法。
背景技术
近几年来,激光清洗作为一种新型的环保清洗技术逐渐兴起,在国民生产中应用的越来越广泛。作为一种新兴的技术,激光清洗通过激光与物质的相互作用而发生复杂的光物理、化学反应,能够有效的将基材表面的污染物清除,从而将基材清洗干净。清洗过程中产生的固体废弃物能够回收,基本不对环境造成影响,达到环保清洗的目的;同时,激光清洗是一种非接触、非研磨的清洗方式,且能实现自动化、智能化清洗,基本不对清洗工件造成损害,故广泛应用在军工、汽车、电子电路、模具等行业。激光淬火是将高能量的激光束快速辐照在基材表面,使被辐照的基材表面温度以极快的速度升到高与材料相变点但低于熔化点温度,当激光束离开辐照部位时,基材迅速冷却从而使基材表面硬化,达到提升基材表面硬度、强度、耐磨性、耐蚀性的目的。激光淬火是一种快速表面淬火的高新技术,可以大幅提高产品的质量和使用寿命,在许多行业的产品中有广泛应用。
实际生产中,存在许多大型结构件、墙体构件的清洗和淬火。这些大型构件表面有锈迹、油污、粉尘,氧化膜等污染物,从而影响激光淬火过程中激光的吸收,最终影响激光淬火的效果和效率,一般在激光淬火前对工件表面进行清洗处理,传统的擦拭、打磨劳动强度大,喷砂和酸洗环境污染大,故激光清洗越来越受到人们的重视。另一方面因大型结构件体积大且不易拆卸,采用便携的手持设备进行作业,工作量大,劳动强度大,且高空作业危险程度高,故无法满足实际生产要求。采用固定的机械式设备进行作业,需将大型构件拆卸或切割成小件才能进行,极大增加了作业难度与成本,同时破坏了结构件的完整性,同时增大了额外的工序和成本,采用现有的装置对这些大型结构件、墙体构件的清洗和淬火,存在很大问题,严重制约了激光技术在大型构件中的应用。
发明内容
本发明的主要目的在于提供一种激光清洗淬火装置及工作方法,以解决对大型结构件进行清洗淬火时存在的劳动强度大、高空作业危险程度高以及作业难度和成本增大、结构件完整性被破坏等技术问题。
为实现上述目的,本发明提供一种激光清洗淬火装置,包括:控制系统、爬壁机器人、激光器以及清洗淬火功能头;
所述控制系统分别与所述爬壁机器人、所述激光器以及所述清洗淬火功能头相连接,所述激光器与所述清洗淬火功能头设置在所述爬壁机器人上,且所述激光器的激光出口与所述清洗淬火功能头连接。
进一步地,所述激光器包括分别与所述控制系统连接的第一激光器和第二激光器,且所述第一激光器的激光出口和所述第二激光器的激光出口分别与所述清洗淬火功能头连接。
进一步地,所述清洗淬火功能头包括第一功能头和第二功能头,所述第一功能头与所述第一激光器连接,所述第二功能头与所述第二激光器连接。
进一步地,所述第一激光器为半导体激光器,其功率为P1,所述P1≥3000W;所述第二激光器为脉冲激光器,其功率为P2,所述P2≤200W。
进一步地,所述爬壁机器人包括机器人本体以及可相对所述机器人本体水平移动和升降的夹持机构。
进一步地,所述清洗淬火功能头固定于所述夹持机构。
进一步地,所述爬壁机器人还包括分别与所述控制系统连接的高速相机和路径识别传感器。
进一步地,一种激光清洗淬火装置的工作方法,所述激光清洗淬火装置为前所述的激光清洗淬火装置,包括:
控制系统控制爬壁机器人按第一预设路径行走;
在所述爬壁机器人的第一行走过程中,所述控制系统控制清洗淬火功能头的光学镜片摆动并控制激光器出光以对结构件进行清洗;
所述控制系统控制所述爬壁机器人按第二预设路径行走;
在所述爬壁机器人的第二行走过程中,所述控制系统控制所述清洗淬火功能头的光学镜片摆动并控制激光器出光以对清洗完成的所述结构件进行淬火。
进一步地,所述控制系统控制清洗淬火功能头的光学镜片摆动并控制激光器出光以对结构件进行清洗具体为:
所述控制系统控制清洗淬火功能头的光学镜片摆动并控制第二激光器发射低功率激光以对结构件进行清洗;
或,所述控制系统控制清洗淬火功能头的光学镜片摆动并控制第一激光器发射出高功率激光以对结构件进行粗清洗;
所述控制系统控制清洗淬火功能头的光学镜片摆动并控制第二激光器发射低功率激光以对结构件进行精清洗。
进一步地,所述控制系统控制所述清洗淬火功能头的光学镜片摆动并控制激光器出光以对清洗完成的所述结构件进行淬火具体为:
所述控制系统控制清洗淬火功能头的光学镜片摆动并控制第一激光器发射高功率激光以对已清洗完成的所述结构件进行淬火。
与现有技术相比,本发明的有益效果在于:将激光器、清洗淬火功能头与爬壁机器人相结合,并通过控制系统分别控制激光器的开关、爬壁机器人的移动行走和转动,控制爬壁机器人能够带动激光器和清洗淬火功能头在结构件上稳定的行走,在爬壁机器人的行走过程中,控制系统同时控制清洗淬火功能头的光学镜片摆动和激光器出光,以实现对结构件的清洗或淬火或先清洗再淬火。运用本技术方案能够实现大型结构件的清洗淬火工作,提升了清洗淬火设备的工作效率和智能化水平,扩展了激光技术与机器人技术的应用领域。解决了对大型结构件进行清洗淬火时存在的劳动强度大、高空作业危险程度高以及作业难度和成本增大、结构件完整性被破坏等技术问题。
附图说明
为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
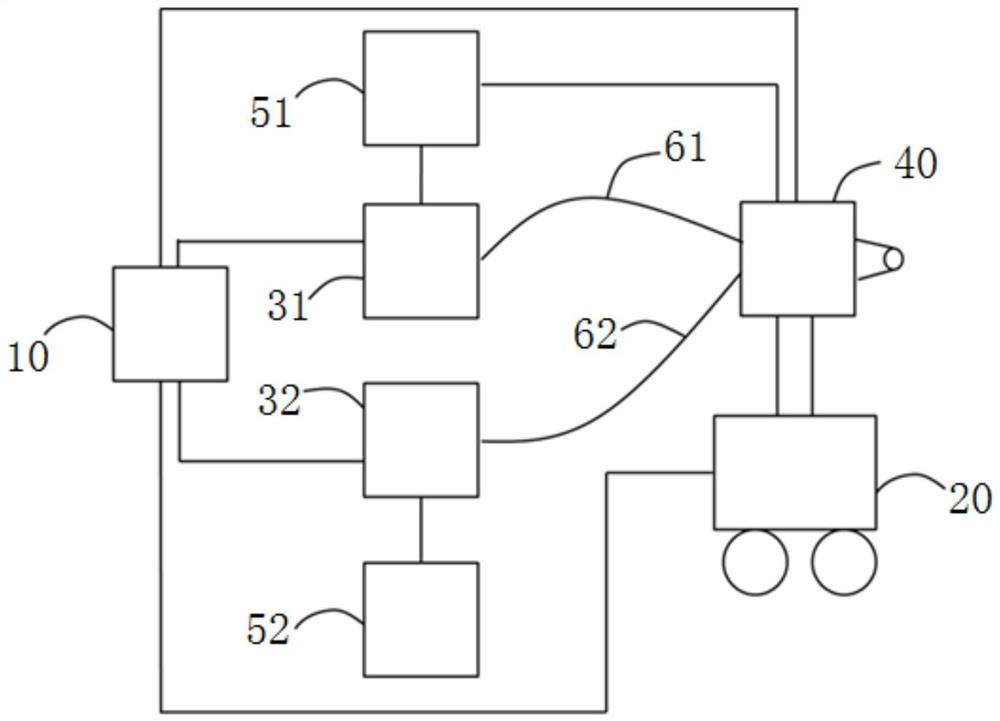
图1为本发明的一种激光清洗淬火装置的整体结构示意图;
图2为激光清洗淬火装置工作方法的一流程示意图。
其中,上述附图包括以下附图标记:
10、控制系统;20、爬壁机器人;31、第一激光器;32、第二激光器;40、清洗淬火功能头;51、第一冷水机;52、第二冷水机;61、第一光纤;62、第二光纤。
具体实施方式
为使得本发明的发明目的、特征、优点能够更加的明显和易懂,下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而非全部实施例。基于本发明中的实施例,本领域技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
请参阅图1,一种激光清洗淬火装置,包括:控制系统10、爬壁机器人20、激光器以及清洗淬火功能头40;所述控制系统10分别与所述爬壁机器人20、所述激光器以及所述清洗淬火功能头40相连接,所述激光器与所述清洗淬火功能头40设置在所述爬壁机器人20上,且所述激光器的激光出口与所述清洗淬火功能头40连接。
爬壁机器人20小巧灵活,采用磁轮驱动,能够在各种平面和一定直径的曲面、钢结构墙面稳定行走,且能自由转向和跨越一定高度和宽度的障碍物。
在本发明中,将激光器、清洗淬火功能头40与爬壁机器人20相结合,并通过控制系统10分别控制激光器的开关、爬壁机器人20的移动行走和转动,控制爬壁机器人20能够带动激光器和清洗淬火功能头40在结构件上稳定的行走,在爬壁机器人20的行走过程中,控制系统10同时控制清洗淬火功能头40的光学镜片摆动和激光器出光,以实现对结构件的清洗或淬火或向清洗再淬火。运用本技术方案能够实现大型结构件的清洗淬火工作,提升了清洗淬火设备的工作效率和智能化水平,扩展了激光技术与机器人技术的应用领域。解决了对大型结构件进行清洗淬火时存在的劳动强度大、高空作业危险程度高以及作业难度和成本增大、结构件完整性被破坏等技术问题。
激光器的数量不作限定,可根据具体情况选择合适数量的激光器。本实施例中,所述激光器包括分别与所述控制系统10连接的第一激光器31和第二激光器32,且所述第一激光器31的激光出口和所述第二激光器32的激光出口分别与所述清洗淬火功能头40连接。将激光器的数量限定为第一激光器31和第二激光器32,第一激光器31可以为高功率激光器配合清洗淬火功能头40对结构件进行淬火,第二激光器32可以为低功率激光器配合清洗淬火功能头40对结构件进行清洗。或,第一激光器31可以且低功率激光器配合清洗淬火功能头40对结构件进行清洗,第二激光器32可以为高功率激光器配合清洗淬火功能头40对结构件进行淬火。即控制系统10能够同时控制第一激光器31和第二激光器32的开关,且第一激光器31和第二激光器32相互独立互不干涉;通过对第一激光器31和第二激光器32进行清洗淬火的工作分配,防止其工作时间过长,工作温度超出正常范围。
优选地,激光清洗淬火装置还包括冷水机,冷水机分别与第一激光器31、第二激光器32和清洗淬火功能头40连接,保证第一激光器31、第二激光器32和清洗淬火功能头40在正常的工作温度范围内。具体地,冷水机包括第一冷水机51和第二冷水机52,第一冷水机51通过水管与第一激光器31、清洗淬火功能头40连接,第二冷水机52通过水管和第二激光器32连接,在此不限定冷水机的数量和连接方式。
需要说明的是,清洗淬火功能头40中的光学器件能够承受高功率激光,能够实现输出方形或线形光斑在结构表面进行清洗和淬火。
优选地,所述清洗淬火功能头40包括第一功能头和第二功能头,所述第一功能头与所述第一激光器31连接,所述第二功能头与所述第二激光器32连接。通过将清洗淬火功能头40拆分成分别与第一激光器31、第二激光器32连接的第一功能头和第二功能头,控制系统10可以同时控制第一激光器31和第二激光器32出光,实现同步清洗和淬火,进一步提高效率。
进一步地,激光清洗淬火装置还包括第一光纤61和第二光纤62,第一光纤61设置在第一激光器31的激光出口与清洗淬火功能头40之间,第二光纤62设置在第二激光器32与的激光出口与清洗淬火功能头40之间,将第一激光器31、第二激光器32输出的激光束传输到清洗淬火功能头40,在保证光束质量前提下,第一光纤61和第二光纤62的长度越长越好,且能够承受足够高的功率。当清洗淬火功能头40包括第一功能头和第二功能头时,第一光纤61设置在第一激光器31的激光出口与第一功能头之间,第二光纤62设置在第二激光器32的激光出口与第二功能头之间。
优选地,所述第一激光器31采用半导体激光器,其功率为P1,所述P1≥3000W,在保证稳定性的情况下,其功率越高越好。所述第二激光器32为脉冲激光器,其功率为P2,所述P2≤200W。
进一步地,所述爬壁机器人20包括机器人本体以及可相对所述机器人本体水平移动和升降的夹持机构,且所述清洗淬火功能头40固定于所述夹持机构。爬壁机器人20的夹持机构能够承受一定的载荷,能够稳固牢靠的固定清洗淬火功能头40。控制系统10控制夹持机构以带动清洗淬火功能头40进行升降和移动,以对清洗淬火功能头40的焦点位置进行粗调节;然后再控制清洗淬火功能头40中光学镜片进行摆动,以对清洗淬火功能头40的焦点位置进行微调节。
优选地,所述爬壁机器人20还包括分别与所述控制系统10连接的高速相机和路径识别传感器。通过高速相机实现对清洗淬火效果的监测,通过路径识别传感器行实现对进路径的识别,并能将监测结果实时反馈到控制系统10,通过调节工艺参数与行进路径,保证清洗淬火的效果与效率。
参见图2,本发明还提供了该激光清洗淬火装置的工作方法,包括以下步骤:
101、控制系统10控制爬壁机器人20按第一预设路径行走;
102、在所述爬壁机器人20的第一行走过程中,所述控制系统10控制清洗淬火功能头40的光学镜片摆动并控制激光器出光以对结构件进行清洗;
103、所述控制系统10控制所述爬壁机器人20按第二预设路径行走;
104、在所述爬壁机器人20的第二行走过程中,所述控制系统10控制所述清洗淬火功能头40的光学镜片摆动并控制激光器出光以对清洗完成的所述结构件进行淬火。
当需要对结构件进行清洗时,控制系统10控制爬壁机器人20按照第一预设路径行走,在爬壁机器人20的第一行走过程,控制系统10同时控制清洗淬火功能头40的光学镜片进行摆动,以调节好清洗淬火功能头40的焦点位置,并控制激光器出光对结构进行激光清洗。在清洗完成后,若需要继续对结构件进行淬火,则控制系统10控制爬壁机器人20按预设第二路径行走,在爬壁机器人20的第二行走过程中,控制系统10同时控制清洗淬火功能头40的光学镜片进行摆动,以调节好清洗淬火功能头40的焦点位置,并控制激光器出光对结构进行激光淬火。
若对结构件淬火时不需要清洗,可在爬壁机器人20的第一行走过程中,控制系统10可直接控制激光器出光对结构进行激光淬火。
进一步地,步骤102所述控制系统10控制清洗淬火功能头40的光学镜片摆动并控制激光器出光以对结构件进行清洗具体可为:
所述控制系统10控制清洗淬火功能头40的光学镜片摆动并控制第二激光器32发射低功率激光以对结构件进行清洗。
当结构表面不存在难清洗污染物,只需要增加材料硬度、强度时。而第二激光器32为脉冲激光器,脉冲激光器为低功率激光器,其功率P2≤200W。因此只需要控制第二激光器32(脉冲激光器)发射出激光便可以对结构件的表面进行激光清洗。通过淬火前对结构件表面的污染物进行激光清洗,能够提升淬火时激光的吸收,提升结构件表面淬火质量和效率。
或,步骤102所述控制系统10控制清洗淬火功能头40的光学镜片摆动并控制激光器出光以对结构件进行清洗具体可为:
所述控制系统10控制清洗淬火功能头40的光学镜片摆动并控制第一激光器31发射出高功率激光以对结构件进行粗清洗;
所述控制系统10控制清洗淬火功能头40的光学镜片摆动并控制第二激光器32发射低功率激光以对结构件进行精清洗。
当结构件表面有油漆或其他难清洗污染物,用低功率激光器清洗效率太低,必须采用高功率激光器清洗设备来清洗,但高功率脉冲激光器受制于技术原因,功率无法大幅提升,且设备价格太高,极大制约了高功率脉冲激光器的应用;同时,高功率清洗过程容易氧化而使基材发蓝、发黄,导致基材清洗后的效果比较差。
因此,在本技术方案中,通过第一激光器31(高功率半导体激光器)与第二激光器32(低功率脉冲激光器)对油漆及其它难清洗物的清洗,能够提升清洗效率和效果,降低设备的成本。即先通过第一激光器31(高功率半导体激光器)对结构件的表面进行粗清洗,第一激光器31的激光能量高,虽然油漆等污染物已被清洗,但清洗后结构件的表面发生二次氧化;因此,采取第二激光器32的低功率激光对结构件进行精清洗,将二次氧化去除,完成清洗工作。
更进一步地,步骤104所述控制系统10控制清洗淬火功能头40的光学镜片摆动并控制激光器出光以对清洗完成的所述结构件进行淬火具体为:
所述控制系统10控制清洗淬火功能头40的光学镜片摆动并控制第一激光器31发射高功率激光以对已清洗完成的所述结构件进行淬火。
第一激光器31为高功率的半导体激光器,其功率P1≥3000W,控制系统10控制第一激光器31发射出高功率激光对已清洗完成的所述结构件进行淬火,以增加结构件的强度和硬度。
上述对该激光清洗淬火装置的工作方法进行了描述列举,需要说明的是,该激光清洗淬火装置的工作方法不局限于此,在此对其工作方法不作限定。如,当清洗淬火功能头40拆分成第一功能头和第二功能头时,控制系统10还可以分别第一激光器31和第二激光器32出光,对结构同时进行清洗、淬火工作,大幅度提高该激光清洗淬火装置的工作效率。
以上为对本发明所提供的一种激光清洗淬火装置及切割方法,对于本领域的技术人员,依据本发明实施例的思想,在具体实施方式及应用范围上均会有改变之处,综上,本说明书内容不应理解为对本发明的限制。