钢结构打磨装置
文献发布时间:2023-06-19 19:23:34
技术领域
本发明涉及钢结构的加工的技术领域,具体地,涉及一种钢结构打磨装置。
背景技术
砂带打磨机是对钢结构外部毛刺进行打磨的关键设备。打磨效果的好坏直接关系到钢结构成品的好坏。当打磨不好时其外部会存在大量的毛刺,最终会造成成品无法涂漆等后果。现有技术中的砂带打磨机的砂带容易在启动时速度较慢时就摩擦到钢结构,砂带容易在此时被磨损破坏,其使用寿命受此影响较大,而其不易更换的特性又限制了其工作效率。
发明内容
本发明的目的是提供一种钢结构打磨装置,该钢结构打磨装置可以限制钢结构的姿态,且在砂带的转速超过预设速度后再与矫正姿态后的钢结构相接触,另外在损坏后容易更换。
为了实现上述目的,本发明提供了一种钢结构打磨装置,所述钢结构打磨装置包括:基体、安装于所述基体上的支撑架、配置于所述支撑架上且用于矫正钢结构姿态的姿态矫正机构、配置于所述支撑架上的砂带定位机构以及安装于所述基体上的驱动机构;其中,在所述姿态矫正机构朝所述砂带移动至一位置时,所述驱动机构能够驱动所述砂带定位机构转动,使得所述砂带定位机构上所套接的砂带保持第一滑移速度;在所述姿态矫正机构朝所述砂带移动至金属件打磨对应的一位置时,所述驱动机构能够驱动所述砂带定位机构转动,使得所述砂带保持第二滑移速度,其中,所述第二滑移速度大于所述第一滑移速度。
优选地,所述姿态矫正机构包括:安装于所述支撑架上的底板、能够在所述底板上滑动以靠近或远离所述砂带的矫正结构和安装于所述底板上且连接于所述矫正结构的驱动气缸;其中,所述矫正结构能够矫正所述钢结构的姿态,使得所述钢结构的待打磨位置靠近或远离所述砂带;所述驱动气缸能够驱动所述矫正结构移动。
优选地,所述矫正结构包括:能够沿所述底板的长度方向移动的壳体和置于所述壳体内部且相间隔地设置的辊体;其中所述辊体能够夹持所述钢结构以矫正所述钢结构的姿态。
优选地,所述砂带定位机构包括:连接于所述驱动机构且用于套接所述砂带的一端的第一套辊、套接于所述砂带另一端的第二套辊和安装于所述支撑架上且能够调节所述第一套辊与所述第二套滚之间距离的调节组件;其中所述调节组件能够使得所述第一套辊和第二套辊上套接的砂带绷紧。
优选地,所述调节组件包括:铰接于所述支撑架的铰接板和一端连接于所述铰接板的一端且另一端固定于所述支撑架上的弹簧;其中,所述铰接板的另一端连接于所述第二套辊。
优选地,所述支撑架上配置有滑动槽;其中,所述滑动槽包括用于绷紧所述砂带对应的第一位置和连通于所述第一位置且用于拆卸所述砂带对应的第二位置;并且,所述弹簧的一端能够在固定件与所述滑动槽的限制下从第一位置移动至第二位置。
优选地,所述铰接板上安装有紧密贴合所述第二套辊的清理结构。
优选地,所述支撑架上配置有限制所述铰接板能够转动的极限位置的限位件。
优选地,所述底板上还配置有校直板;其中,所述校直板与所述矫正结构分别配置于所述砂带的两侧。
优选地,所述矫正结构上配置有用于加固所述矫正结构与所述底板的连接处的加强筋。
根据上述技术方案,本发明的钢结构打磨装置利用姿态矫正机构可以限制钢结构的姿态,使其姿态符合打磨的要求,在待打磨的钢结构靠近所述砂带的距离达到一定数值时,直接启动驱动机构,使得所述砂带定位机构的转速超过预设速度后,当所述钢结构继续向所述砂带移动时,砂带的转速在有第一滑移速度的情况下,不会出现砂带磨损严重的情况,且可以较好的降低能源消耗。
本发明的其他特征和优点将在随后的具体实施方式部分予以详细说明。
附图说明
附图是用来提供对本发明的进一步理解,并且构成说明书的一部分,与下面的具体实施方式一起用于解释本发明,但并不构成对本发明的限制。在附图中:
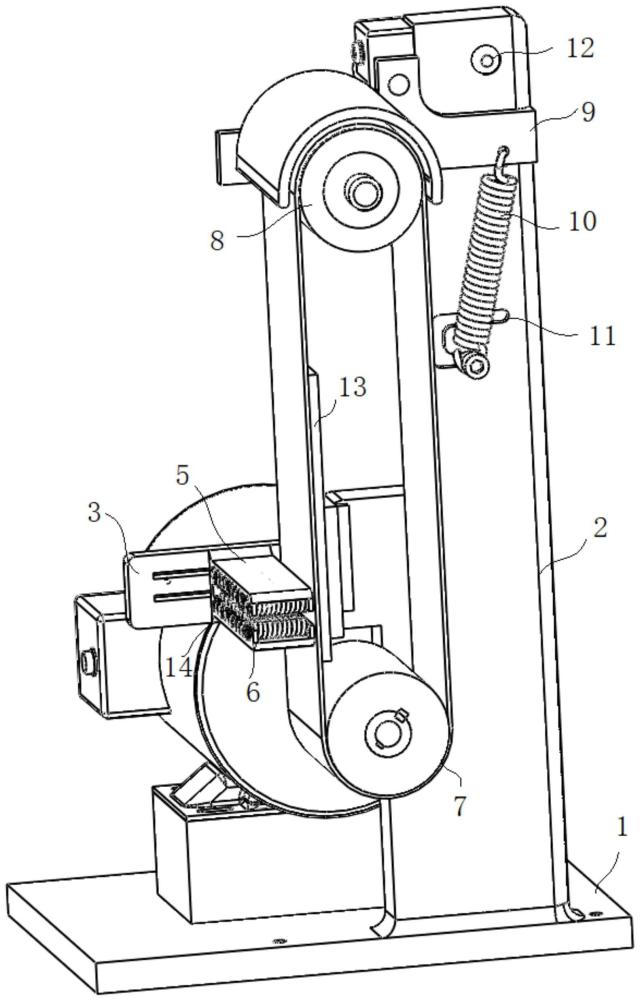
图1是说明本发明的一种钢结构打磨装置的结构示意图;
图2是说明本发明的一种钢结构打磨装置的另一个角度的结构示意图;
图3是说明本发明的一种钢结构打磨装置的姿态矫正机构的结构示意图;以及
图4是本发明的钢结构的结构示意图。
附图标记说明
1、基体;2、支撑架;3、底板;4、驱动气缸;5、壳体;6、辊体;7、第一套辊;8、第二套辊;9、铰接板;10、弹簧;11、滑动槽;12、限位件; 13、校直板;14、加强筋。
具体实施方式
以下结合附图对本发明的具体实施方式进行详细说明。应当理解的是,此处所描述的具体实施方式仅用于说明和解释本发明,并不用于限制本发明。
在本发明中,在未作相反说明的情况下,“上下左右”等包含在术语中的方位词仅代表该术语在常规使用状态下的方位,或为本领域技术人员理解的俗称,而不应视为对该术语的限制。
图1、2是本发明的一种钢结构打磨装置的结构示意图,如图1、2所示,所述钢结构打磨装置包括:基体1、安装于所述基体1上的支撑架2、配置于所述支撑架2上且用于矫正钢结构姿态的姿态矫正机构、配置于所述支撑架2上的砂带定位机构以及安装于所述基体1上的驱动机构;其中,在所述姿态矫正机构朝所述砂带移动至一位置时,所述驱动机构能够驱动所述砂带定位机构转动,使得所述砂带定位机构上所套接的砂带保持第一滑移速度;在所述姿态矫正机构朝所述砂带移动至金属件打磨对应的一位置时,所述驱动机构能够驱动所述砂带定位机构转动,使得所述砂带保持第二滑移速度,其中,所述第二滑移速度大于所述第一滑移速度。所述基体1就是下方的底座,其能够起到支撑支撑架2且支撑驱动机构的作用,使得驱动机构能够被固定。
下面结合附图3对本发明的姿态矫正机构和砂带定位机构进行进一步的描述。
优选地,所述姿态矫正机构可以包括:安装于所述支撑架2上的底板3、能够在所述底板3上滑动以靠近或远离所述砂带的矫正结构和安装于所述底板3上且连接于所述矫正结构的驱动气缸4;其中,所述矫正结构能够矫正所述钢结构的姿态,使得所述钢结构的待打磨位置靠近或远离所述砂带;所述驱动气缸4能够驱动所述矫正结构移动。其中,所述底板3是用于固定后续的驱动气缸4、矫正结构的,矫正结构能够将钢板矫正至水平的姿态,其待打磨面直接朝向所述砂带,继而可以完成打磨驱动气缸4的作用则是驱动所述矫正结构朝靠近或远离所述砂带的方向移动,继而可以实现钢结构的打磨,且其位置的判定就是基于驱动气缸4的具体驱动的位置来确定的。
优选地,如图3所示,所述矫正结构可以包括:能够沿所述底板3的长度方向移动的壳体5和置于所述壳体5内部且相间隔地设置的辊体6;其中所述辊体6能够夹持所述钢结构以矫正所述钢结构的姿态。其中,所述辊体 6是上下相对称设置的多个挤压辊,其能够通过齿轮相互啮合,继而在一个驱动电机的驱动下能够同步转动,实现钢结构板体的驱动移动以及姿态矫正。
优选地,所述砂带定位机构可以包括:连接于所述驱动机构且用于套接所述砂带的一端的第一套辊7、套接于所述砂带另一端的第二套辊8和安装于所述支撑架2上且能够调节所述第一套辊7与所述第二套辊8之间距离的调节组件;其中所述调节组件能够使得所述第一套辊7和第二套辊8上套接的砂带绷紧。砂带套接在所述第一套辊7和第二套辊8上,所述第一套辊7 在驱动机构的驱动下能够自由转动,然后通过动力传递,使得砂带能够转动,继而可以实现打磨。
优选地,为了实现第二套辊8位置的调整,使其上固定的砂带方便拆卸,所述调节组件可以包括:铰接于所述支撑架2的铰接板9和一端连接于所述铰接板9的一端且另一端固定于所述支撑架2上的弹簧10;其中,所述铰接板9的另一端连接于所述第二套辊8。
优选地,如图1、2所示,所述支撑架2上配置有滑动槽11;其中,所述滑动槽11包括用于绷紧所述砂带对应的第一位置和连通于所述第一位置且用于拆卸所述砂带对应的第二位置;并且,所述弹簧10的一端能够在固定件与所述滑动槽11的限制下从第一位置移动至第二位置。所述第一位置在下方,而第二位置在上方,由于铰接板9是能够转动地,其右边上升,左边自然下降,拆卸的方式可以是将弹簧10往上拉从而实现砂带的松动。
优选地,为了实现所述砂带的清洁,所述铰接板9上安装有紧密贴合所述第二套辊8的清理结构。
优选地,为了避免铰接板9转动的角度过大造成第二套辊8的掉落,所述支撑架2上配置有限制所述铰接板9能够转动的极限位置的限位件12。
优选地,为了实现砂带的校直,避免其发生褶皱,所述底板3上还配置有校直板13;其中,所述校直板13与所述矫正结构分别配置于所述砂带的两侧。
优选地,为了加固矫正结构与所述底板3的连接处的强度,所述矫正结构上配置有用于加固所述矫正结构与所述底板3的连接处的加强筋14。
本发明的使用方式是,将钢结构放置到所述矫正结构中,然后通过矫正结构矫正所述钢结构的姿态,使其位置相对稳定,然后通过驱动所述驱动气缸4,使得所述钢结构与所述砂带的距离为第一距离,此时,直接驱动所述砂带转动,该转速为预转速,避免直接未转动就接触,然后当到达第二位置,此时为可以打磨的位置,需要再次调整转速,加快速度完成打磨。需要强调的是,本发明的姿态指的是其不存在折叠或者是轻微的倾斜,另外,需要强调的是,本发明所针对的钢结构的结构较为特殊,其为“+”型的结构,即左右两侧刚好可以与所述壳体5的止挡位置相配合,继而可以实现姿态的限制。
以上结合附图详细描述了本发明的优选实施方式,但是,本发明并不限于上述实施方式中的具体细节,在本发明的技术构思范围内,可以对本发明的技术方案进行多种简单变型,这些简单变型均属于本发明的保护范围。
另外需要说明的是,在上述具体实施方式中所描述的各个具体技术特征,在不矛盾的情况下,可以通过任何合适的方式进行组合,为了避免不必要的重复,本发明对各种可能的组合方式不再另行说明。
此外,本发明的各种不同的实施方式之间也可以进行任意组合,只要其不违背本发明的思想,其同样应当视为本发明所公开的内容。