手动工具、轻便机动工具、手动器械的手柄、车间设备、机械手
-
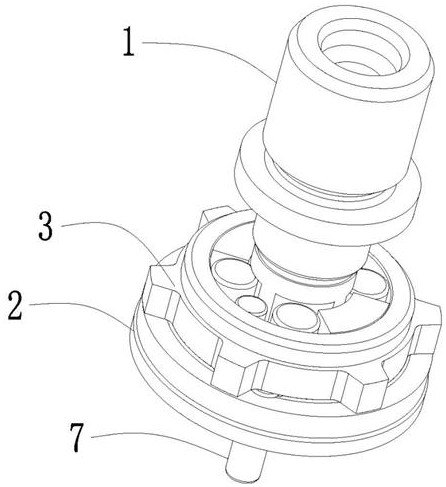
用于晶圆升降的顶针支撑部件的装配方法
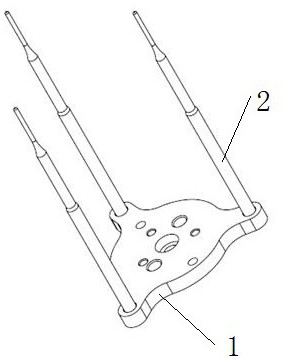
本发明公开了一种用于晶圆升降的顶针支撑部件的装配方法,包括以下步骤:(a)设计装配工装;(b)加工装配工装;(c)对装配工装进行本色阳极氧化处理;(d)将三个陶瓷顶针放入顶针孔内,在底部安装支撑底座,三个陶瓷顶针插进支撑底座陶瓷顶针孔内;将两个定位销装入支撑底座和装配工装定位销孔中,两个螺钉将支撑底座紧固在装配工装上;(e)用工具轻压陶瓷顶针尾部,使三个陶瓷顶针头部与装配工装接触,在支撑底座上陶瓷顶针孔内灌环氧树脂密封胶固定陶瓷顶针;(f)从装配工装上卸下安装好的顶针支撑部件,放入烤箱,设定温度110~130°烘烤3~4小时即可。本发明装配方便,保证了装配质量,大幅度提高了工作效率。
2023-08-21 -
机器人工作范围的获取方法及装置
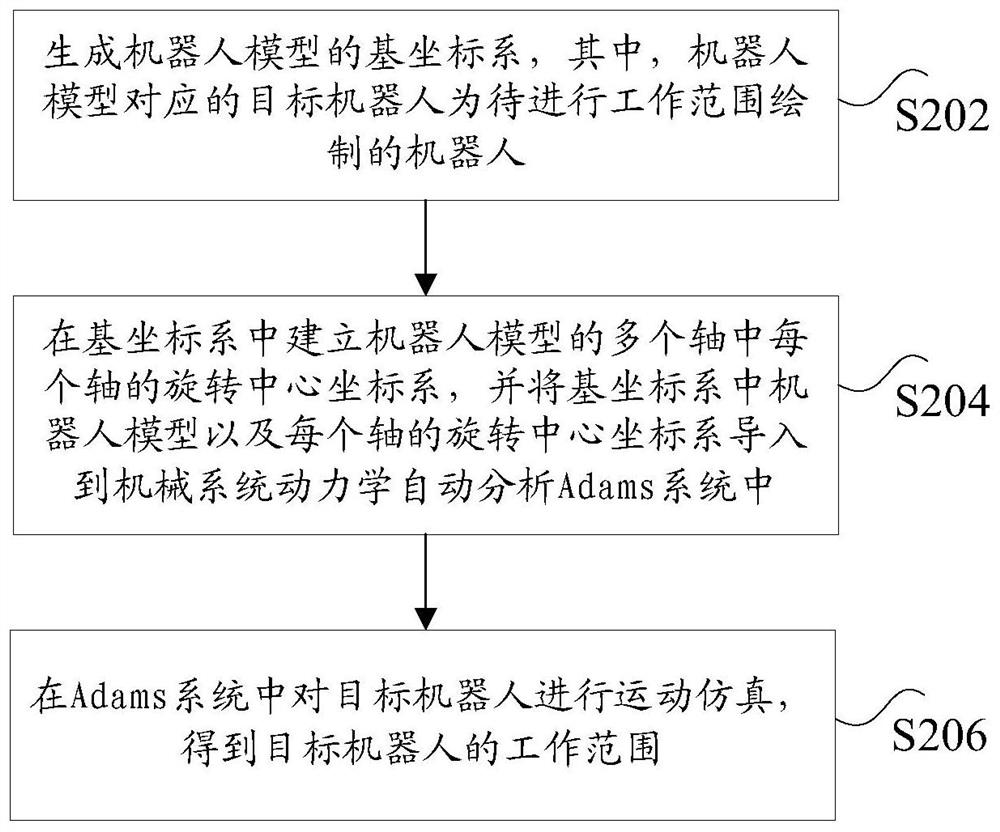
本发明公开了一种机器人工作范围的获取方法及装置。其中,该方法包括:生成机器人模型的基坐标系,其中,机器人模型对应的目标机器人为待进行工作范围绘制的机器人;在基坐标系中建立机器人模型的多个轴中每个轴的旋转中心坐标系,并将基坐标系中机器人模型以及每个轴的旋转中心坐标系导入到机械系统动力学自动分析Adams系统中;在Adams系统中对目标机器人进行运动仿真,得到目标机器人的工作范围。本发明解决了相关技术中用于确定机器人的工作范围的方式比较繁琐,得到的结果不够直观的技术问题。
2023-08-21 -
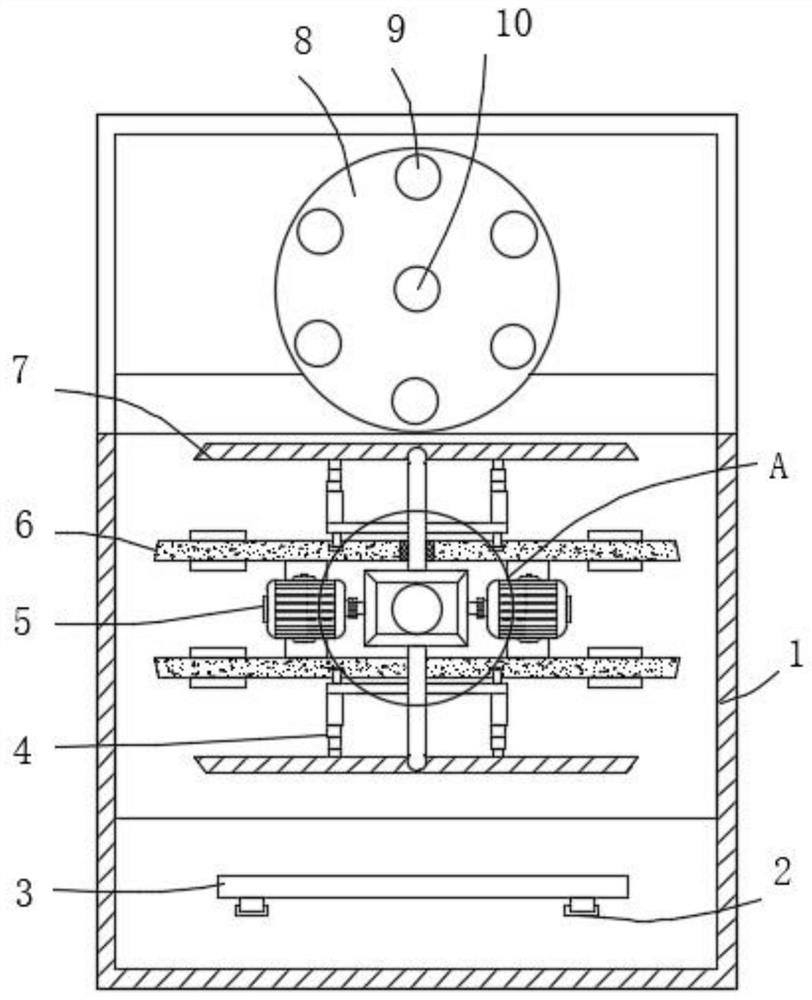
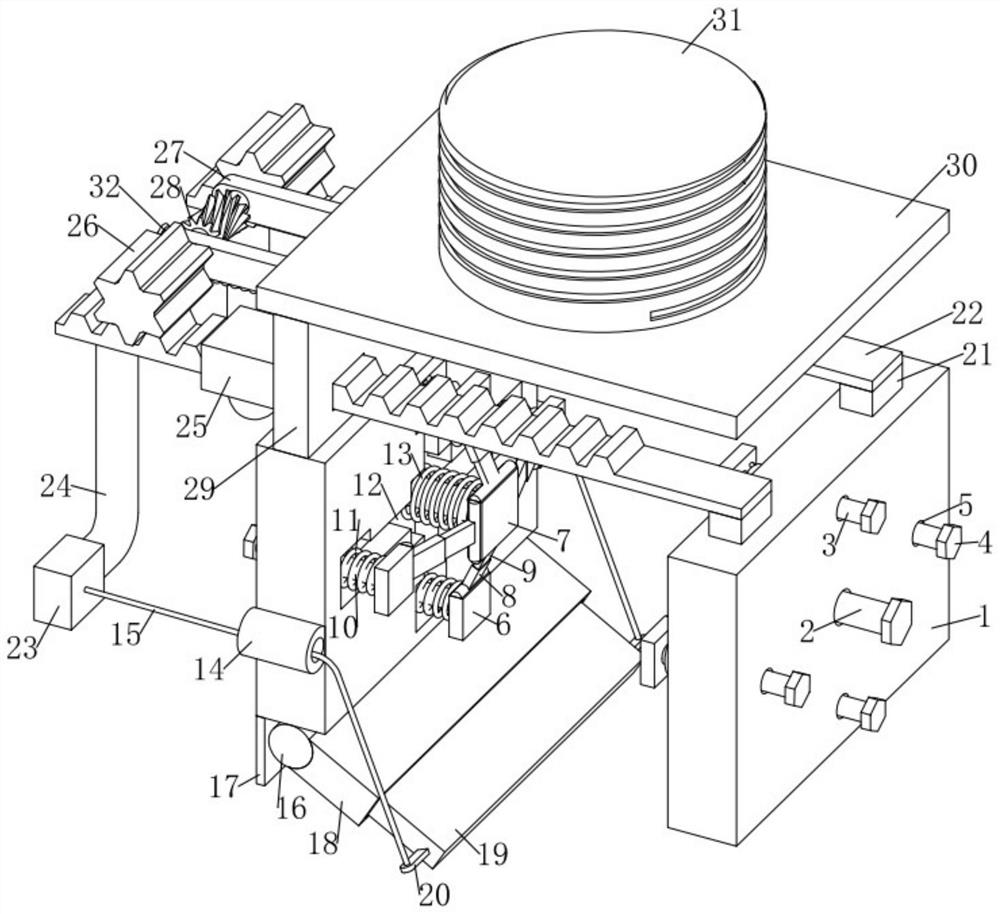
一种可提高精准度的节能环保家具制造装置
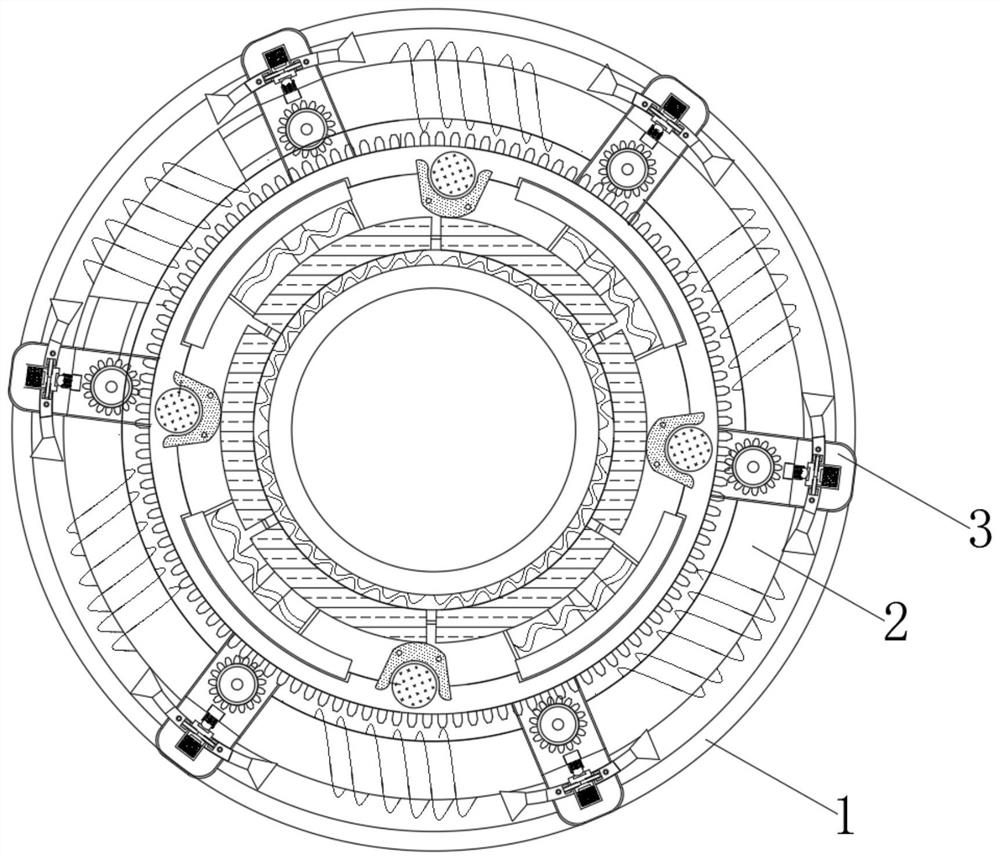
本发明涉及家具制造技术领域,且公开了一种可提高精准度的节能环保家具制造装置,包括本体,所述本体内侧活动连接有线圈,本体外侧活动安装有安装座,安装座内侧活动连接有安装板,安装板上固定连接有齿牙,金属件内侧活动连接有橡胶块,橡胶块内侧活动连接有防护条。该可提高精准度的节能环保家具制造装置,通过金属盘转动并且带动带动安装板运行,齿牙转动时与作用齿轮发生啮合,作用齿轮通过限位槽挤压并且向电流变体内部运行,弹簧杆无法插接至电流变体内部,对安装板进行锁定限制,从而使装置具有了提高准确性的效果,自动化程度高,工作效率高,而不容易在扶持定位时出现晃动,保证其加工质量和效果。
2023-08-21 -
一种几字形龙骨翻边钳及其使用方法
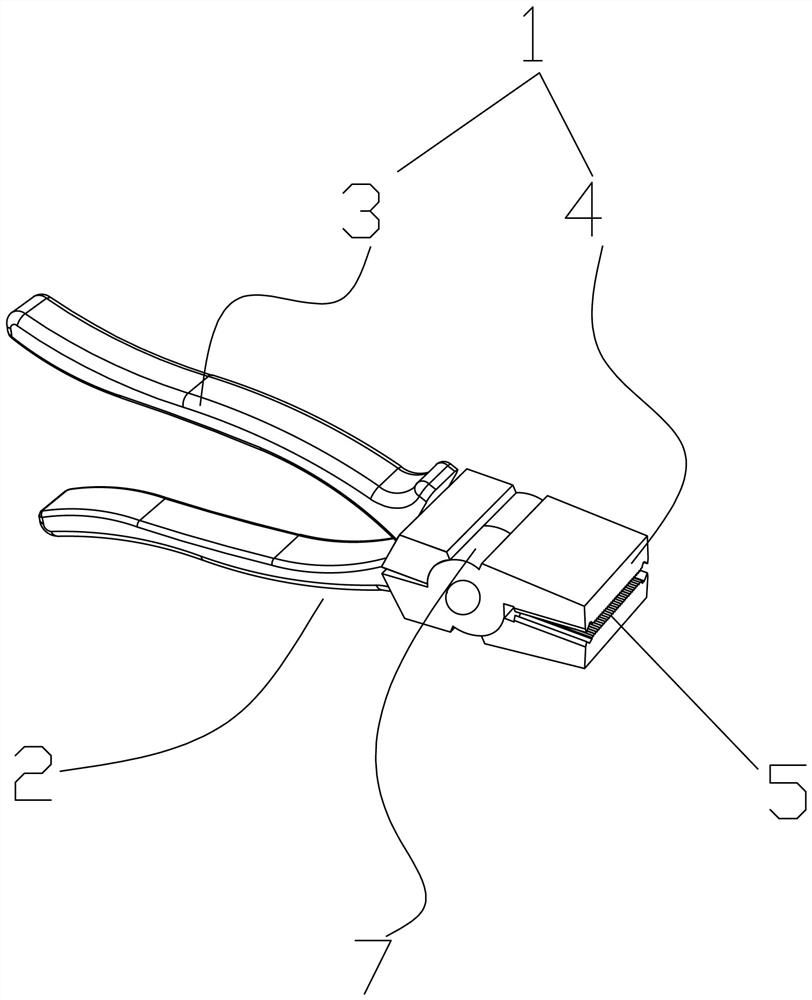
本发明公开了一种几字形龙骨翻边钳,涉及钳具设备技术领域。包括互相活动连接并绕连接处转动并形成两个夹持空间的第一钳杆和第二钳杆,所述第一钳杆或第二钳杆包括钳头部和持握部,所述钳头部设置为板块状结构,所述钳头部的用于钳紧龙骨板的板块端面上设置有夹紧区,同时在所述夹紧区的两侧紧挨着夹紧区还设置有延伸设置到钳头部的非钳紧板块端面处的钳断齿。本发明还公开了一种几字形龙骨翻边钳的使用方法,可提高龙骨翻边作业效率,方便技术人员在施工现场对龙骨翻边操作。
2023-08-21 -
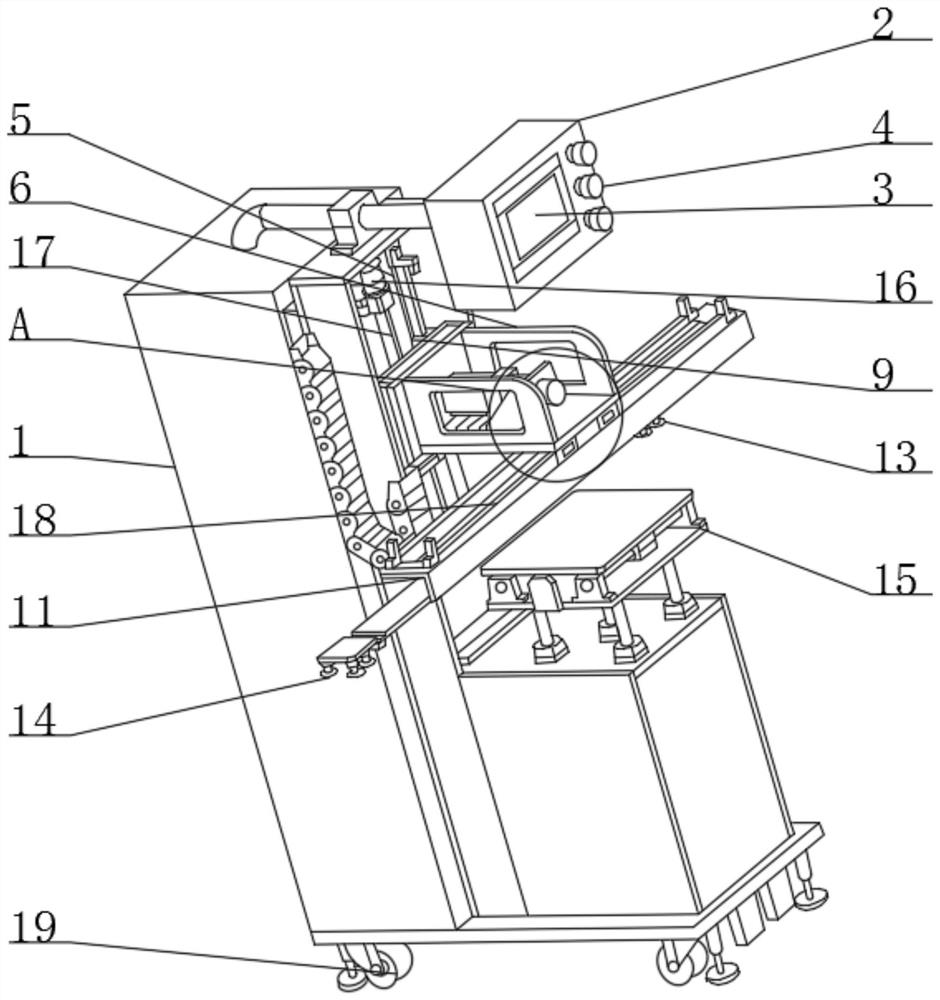
一种用于计算机软件检测的检测平台
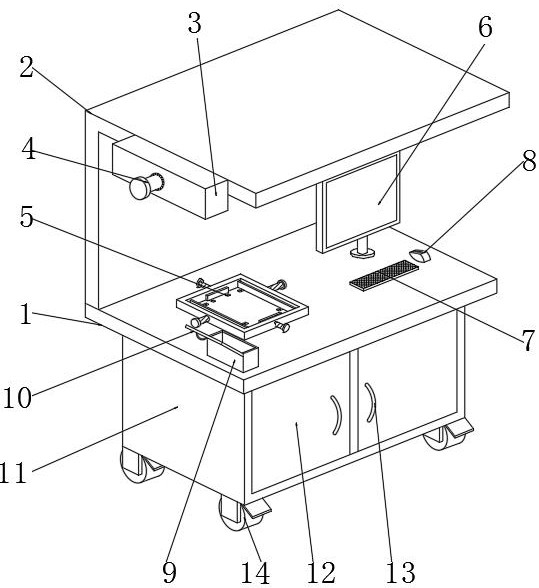
本发明公开了一种用于计算机软件检测的检测平台,包括工作台,工作台的一端固定连接有L型连接板,L型连接板的一侧固定连接有外壳,L型连接板和外壳之间设置有转动装置,工作台顶部的左侧固定设置有限位装置,工作台顶部左侧的边角固定连接有工具盒,工作台的底部固定连接有储存柜,本发明涉及软件检测技术领域。该用于计算机软件检测的检测平台,现有的计算机软件检测的平台在进行检测时,因照明功能是固定的,无法进行调节,导致在进行照明时,无法对准所需要的位置进行照明,来增加光照度,另外计算机分为台式和笔记本,导致在对其进行限位时,需要使用不同的工具,在更换时极其麻烦的问题。
2023-08-21 -
一种路面电路自动检测仪器
本发明公开了一种路面电路自动检测仪器,包括车身板,所述车身板的底面具有四个行走板,每个行走板上转动设有行走轮,所述车身板的顶面由前往后依次设有支撑架、调节通槽以及操作面板,所述车身板的底面活动设有一对吹气头,调节通槽中转动设有活动筒,所述活动筒内设有可升降的检测摄像头。本发明的优点在于:它能在路面上的电线上方行走,该小车上装有角度可调整的摄像头,在行走过程中能够多角度的观察到是否存在破裂的电线,进行实现自动拍照,方便后续的施工处理,大大提高了施工安全性。
2023-08-21 -
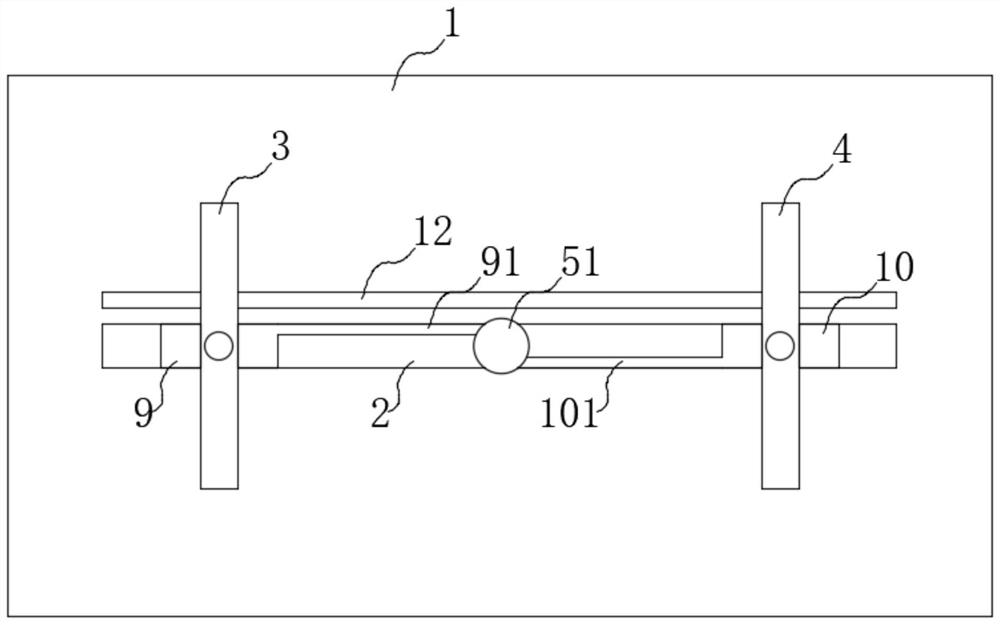
机械设备的台面板装置
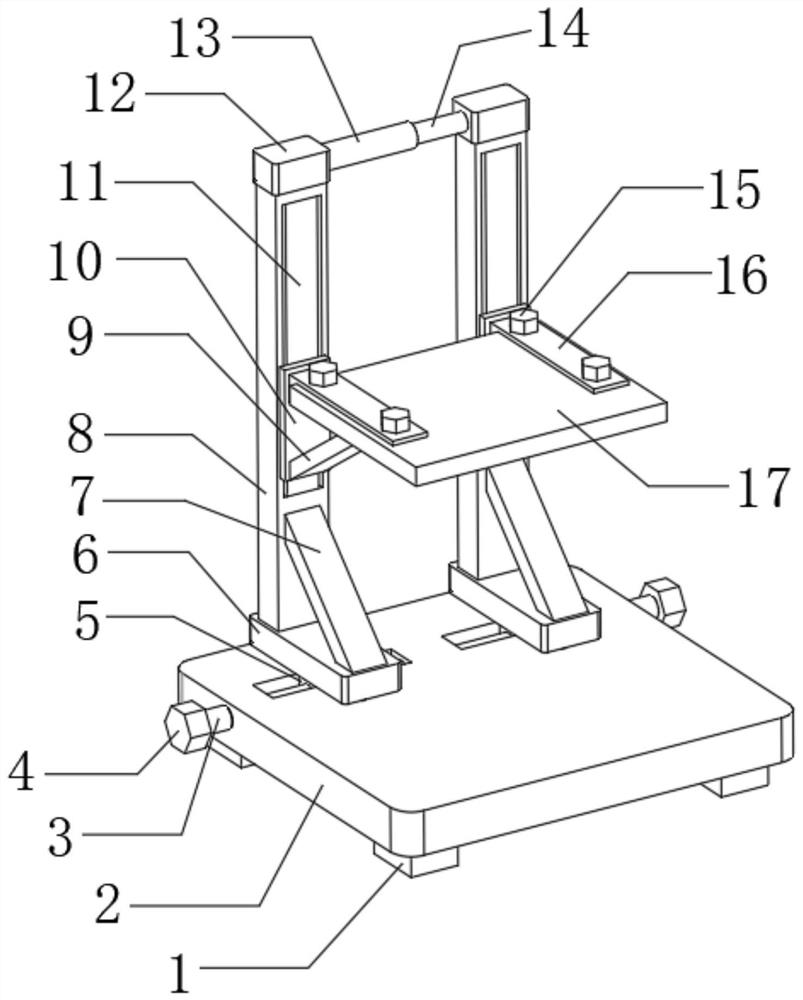
本发明中公开了机械设备的台面板装置,涉及机械设备技术领域;为了解决现有的台面板不便于尺寸调节的问题;具体包括支撑底座,所述支撑底座的底部四角外壁均固定安装有支撑垫,所述支撑底座顶部两侧外壁均开设有第一凹槽,且两个第一凹槽的相邻一侧内壁均通过轴承连接有第一螺纹杆,两个第一凹槽的内壁均滑动设置有支撑块,两个所述支撑块的一侧外壁均开设有螺纹孔。本发明中提出的机械设备的台面板装置,通过在夹板的底部设置有第三支撑板,在第二支撑板和支撑底板之间设置有第一支撑板,由安装板、第三支撑板和夹板构成三角结构,由第二支撑板、支撑底板和第一支撑板构成三角结构,进而可以有效的提高板体支撑的稳定性。
2023-08-21 -
顺应式机器人末端执行器及其控制方法
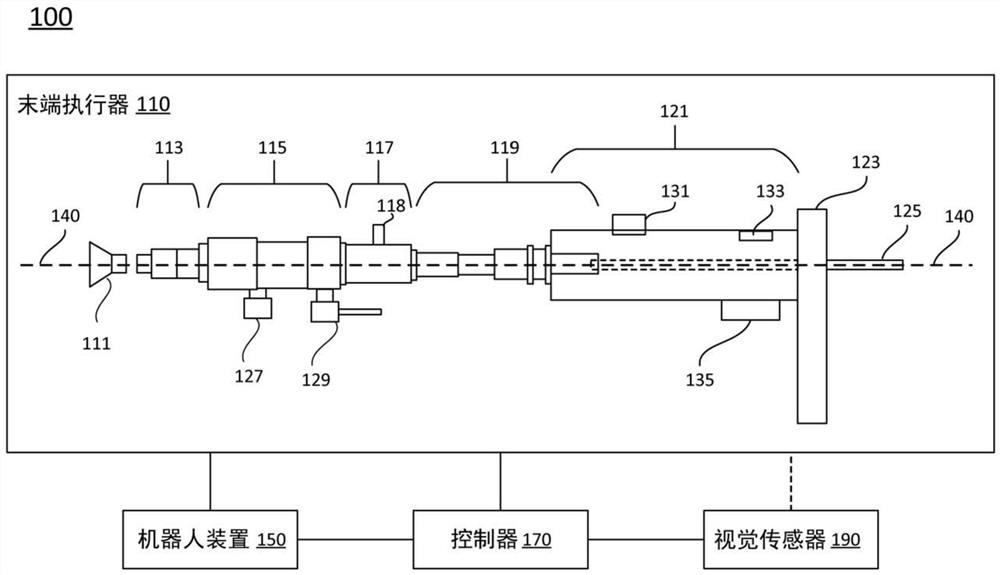
一种用于机器人臂的末端执行器。该末端执行器包括:角度补偿器,用于附接吸盘;真空控制阀、真空生成器、水平补偿器和延伸管,其沿着中心轴线顺序地连接并流体连通;以及真空传感器,其连接到真空控制阀以用于测量真空;近程传感器,其附接到延伸管121以用于确定水平补偿器的位置。当压缩空气沿着中心轴线经过延伸管、水平补偿器和真空生成器时生成真空。水平补偿器沿着中心轴线提供补偿。
2023-08-21 -
一种平移双吸机械手
本发明专利公开了一种平移双吸机械手,包括机体,所述机体顶部设置有控制器,所述控制器前侧面设置有显示屏,所述显示屏一侧设置有控制按钮,所述机体一侧设置有第一滑轨,所述第一滑轨一侧设置有升降装置,所述升降装置包括电机,所述电机传动轴一端设置有齿轮,所述升降装置一侧设置有第一滑槽。本发明专利通过控制器设置好相关的参数,气缸工作带动升降装置上下移动,当升降装置下降时,第一电磁铁吸盘和第二电磁铁吸盘同时通电,第一电磁铁吸盘和第二电磁铁吸盘通电后具有磁性,利用磁性可把工件吸住,避免夹持式损坏工件,吸住工件后,升降装置上升,电机工作,通过齿轮和齿条的作用使滑条水平移动。
2023-08-21 -
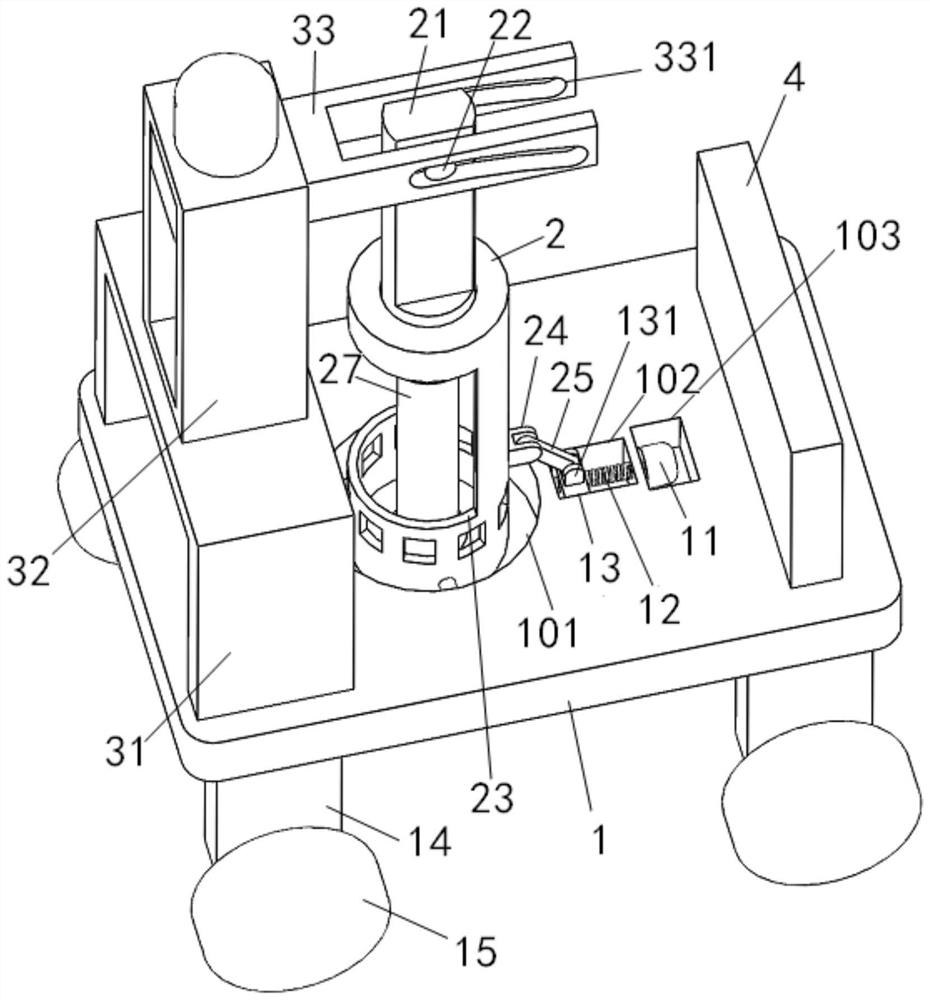
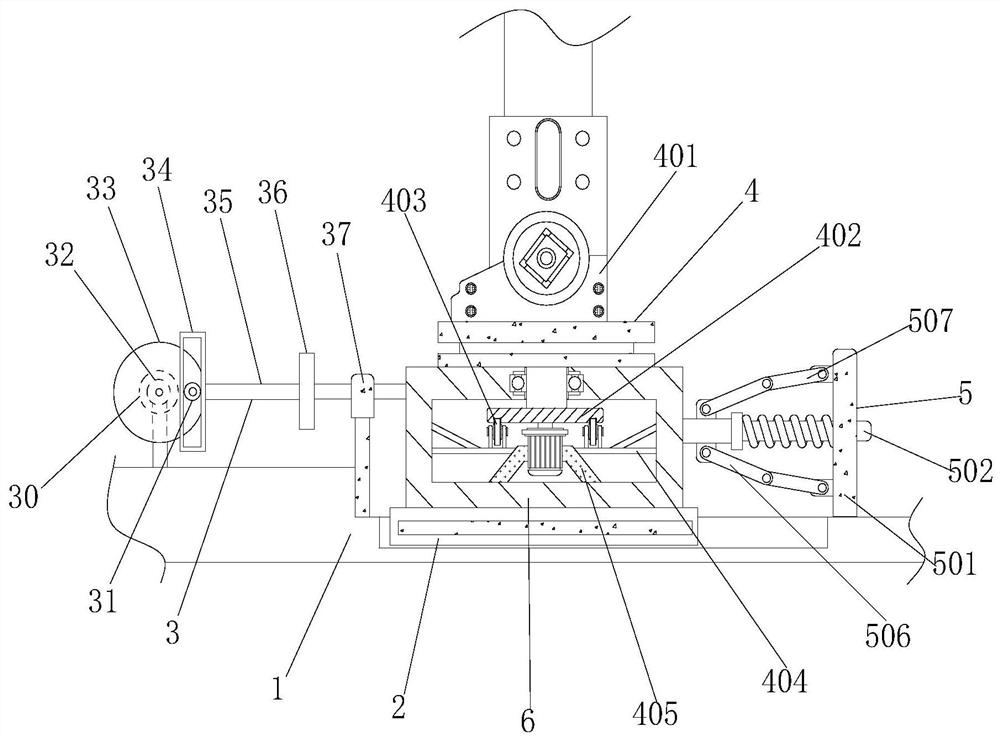
一种汽车空调管路划线工装及其使用方法
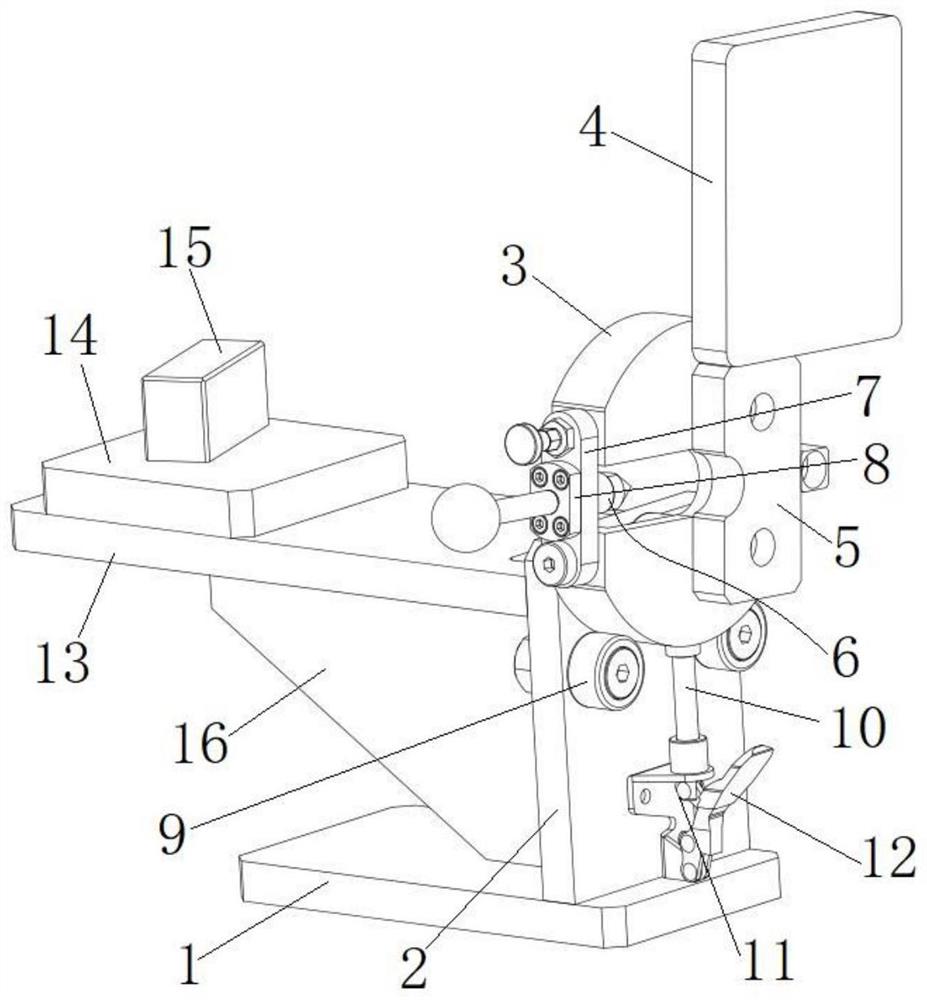
本发明提供了一种汽车空调管路划线工装及其使用方法,该工装包括底板,所述底板上设有第一承载安装板,所述第一承载安装板的一侧面设有用于转动调节空调管路旋转角度的转盘组件、用于对转盘组件进行限位的限位机构和设于转盘组件上用于对空调管路划线的划线机构。本发明通过转盘组件的设置,便于将管路调节到需要的角度,之后通过限位机构进行限位,确保转盘组件角度不偏转,且更换管路时不需要再次转动转盘,划线机构的设置,便于在管路上留下痕迹,便于后续打孔。
2023-08-21 -
一种智能调度载人机器人
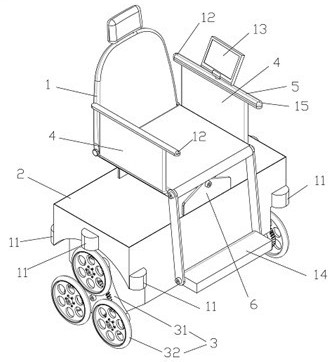
本发明提供一种智能调度载人机器人,包括车体模组、平衡模组、座椅模组和电气控制模组,平衡模组设置在座椅模组与车体模组中间连接处,使座椅模组保持平衡状态;车体模组包括车体和三角驱动轮,三角驱动轮设置在车体底部的两侧,实现机器人的运动;座椅模组包括座椅和安装在座椅扶手上的旋转安全臂,旋转安全臂可以扶手的一端为支撑连接点旋转;电气控制模组分别与车体模组、平衡模组、座椅模组电性连接,用于控制机器人运行过程。该机器人可直接与生产线设备智能连接,当设备或生产质量哪个环节出现了问题时,机器人自动接收到报警,并载着操作人员至故障点进行维修,数据结果可溯源,同时本发明机器人还具有爬坡和防晃动功能。
2023-08-21 -
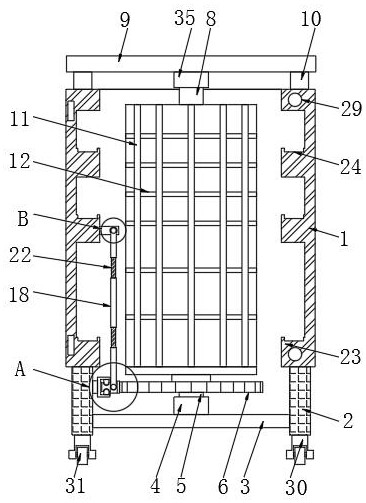
一种纳米光学纹理膜材生产用暂存架
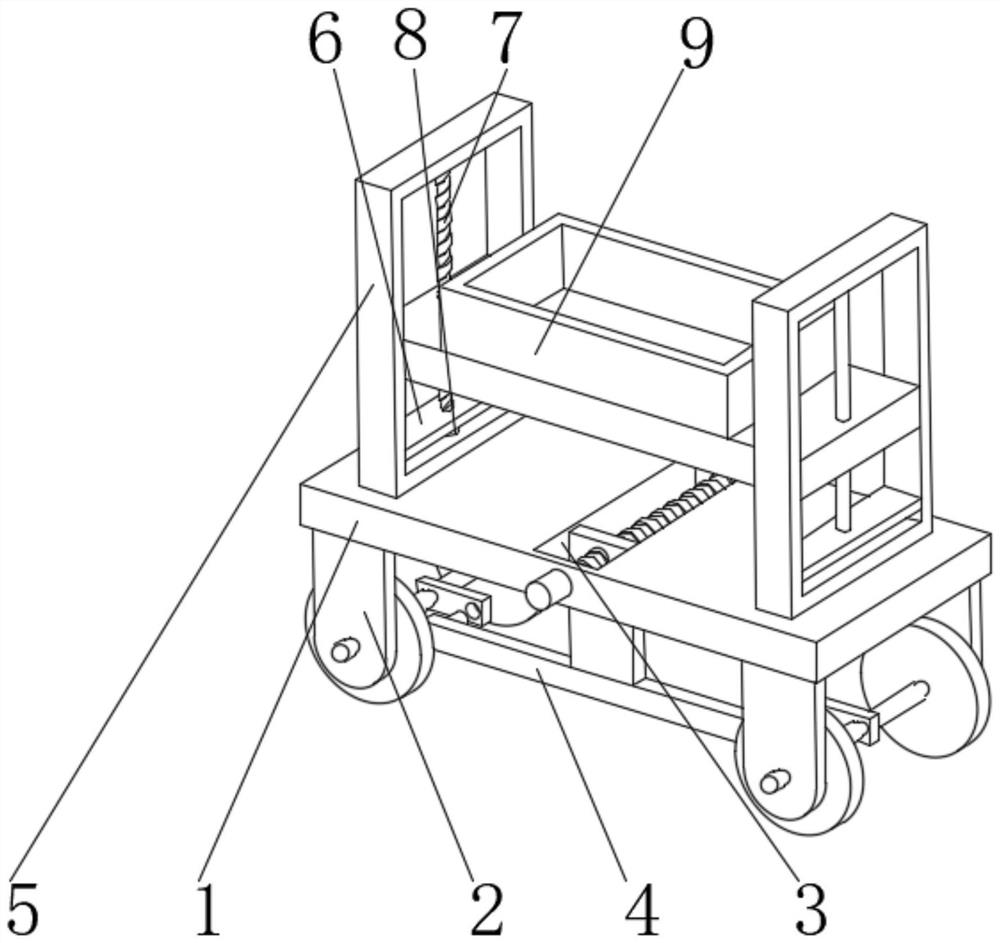
本发明公开了一种纳米光学纹理膜材生产用暂存架,包括放置台,所述放置台的下端左部和下端右部均设置有一个滚动装置,所述放置台的上端中部开设有滑槽,所述滑槽的槽壁设置有滑动卡紧装置,所述放置台的上端左部和上端右部均固定安装有一个回形架,两个所述回形架的内腔下部均固定安装有一个固定板,右侧所述回形架的内腔中部穿插连接有第一螺纹杆,所述第一螺纹杆贯穿左侧固定板的上端中部并固定安装有第一正反电机,所述第一螺纹杆的外表面中部设置有暂存装置。本发明所述的一种纳米光学纹理膜材生产用暂存架,通过横板带动卡紧杆穿插在限位孔内,从而对转轴起到限制作用,防止滚轮自行滚动,提高了稳定性。
2023-08-21 -
一种增强型下肢外骨骼机器人系统
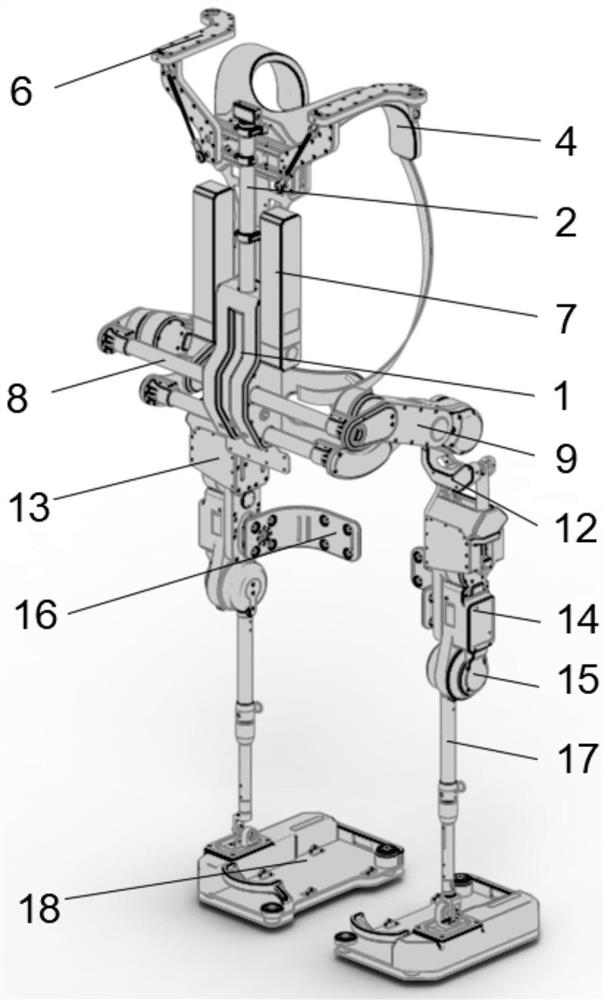
本发明公开了一种增强型下肢外骨骼机器人系统,包括供能单元、控制单元、驱动单元与外骨骼结构,所述外骨骼结构包括机架,所述机架的顶部固定连接有背部连接杆,所述机架与背部连接杆的外壁共同固定连接有背部靠板,所述背部连接杆与背部靠板的外壁共同设置有肩部承重架,所述机架的外壁贯穿设置有多个腰部横杆,多个所述腰部横杆的两端共同对称连接有腰部连杆,所述腰部连杆的一端设置有髋关节;本发明是一种可由负重作业人员穿戴的、能为穿戴者提供支撑和运动助力的落地型下肢外骨骼机器人系统,通过采用与地面直接接触的“落地型”结构,能够为穿戴者有效地减轻负重,降低穿戴者的劳动强度。
2023-08-21 -
一种智能制造电商仓库管理用机械臂
本发明涉及库管设备技术领域,且公开了一种智能制造电商仓库管理用机械臂,包括底座,底座的内部设置有差速轮组,差速轮组内部的下方设置有第一中心轮,第一中心轮的上方设置有第二中心轮,第一中心轮与第二中心轮之间对称设置有两个行星轮,行星轮的外部设置有外齿环,第一中心轮的下方设置有第一制动环,第二中心轮的上方设置有第二制动环,第一中心轮的上方同轴耦接第一传动轴,第二中心轮的上方同轴耦接有第二传动轴,第二传动轴的上端固定连接有半球壳。该智能制造电商仓库管理用机械臂,通过两个驱动源就实现了机械臂的旋转和摆臂,抓取机构的角度调整和抓取动作,尽可能减少电机的使用,使结构更为紧凑,降低了制造成本。
2023-08-21 -
一种基于丝杆同步绕绳单电机驱动的精密绳驱定位装置
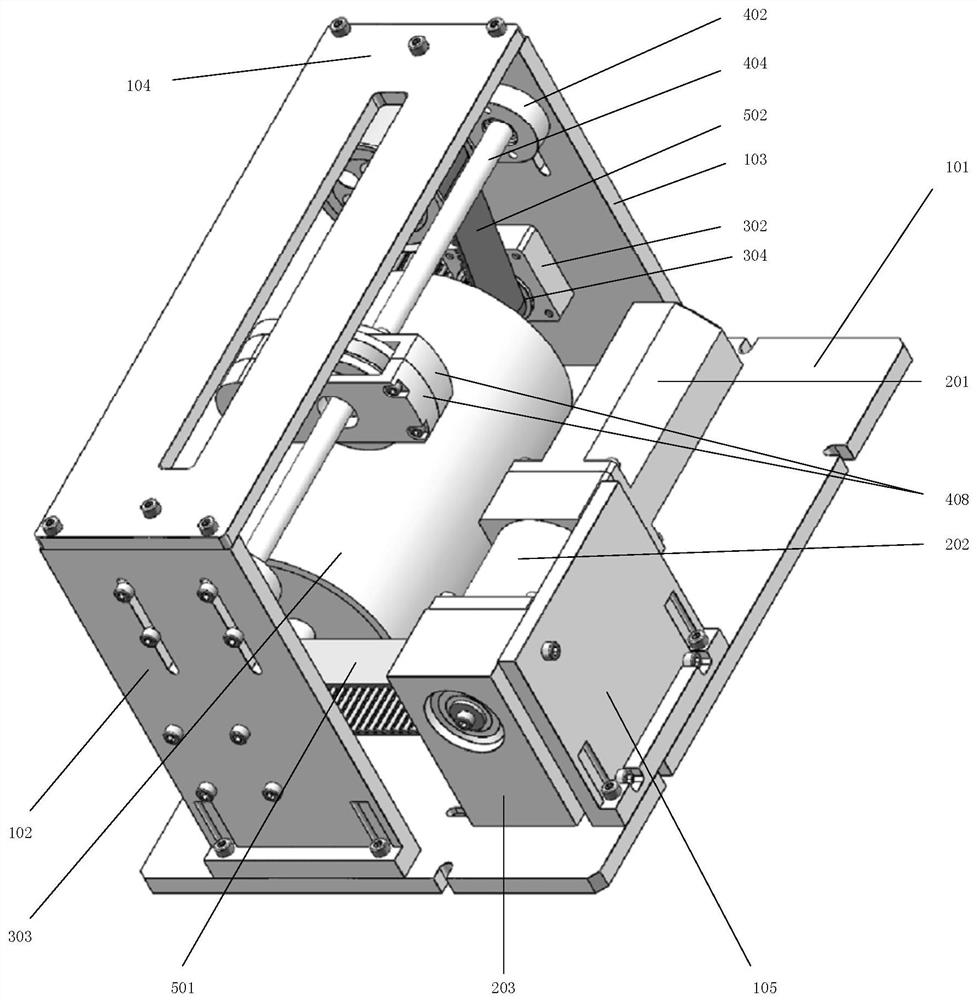
一种基于丝杆同步绕绳单电机驱动的精密绳驱定位装置,它涉及一种精密绳驱定位装置,具体涉及一种基于丝杆同步绕绳单电机驱动的精密绳驱定位装置。本发明为了解决现有绳驱装置的滚筒加工复杂,转动部件的转动惯量较大且存在摩擦损耗、效率较低的问题。本发明的左侧板竖直设置在底板上表面的左侧,右侧板设置在底板上表面的右侧,顶板水平设置,顶板的右端与右侧板的上端连接,侧板安装在底板的上表面上;所述驱动机构安装在底板板上,所述精密同步绕绳机构的左端与左侧板的内侧连接,所述精密同步绕绳机构的右端与右侧板的内侧连接,所述驱动机构通过所述传动机构与所述精密同步绕绳机构连接。本发明属于机电技术领域。
2023-08-21 -
机械臂的末端适配器的控制方法
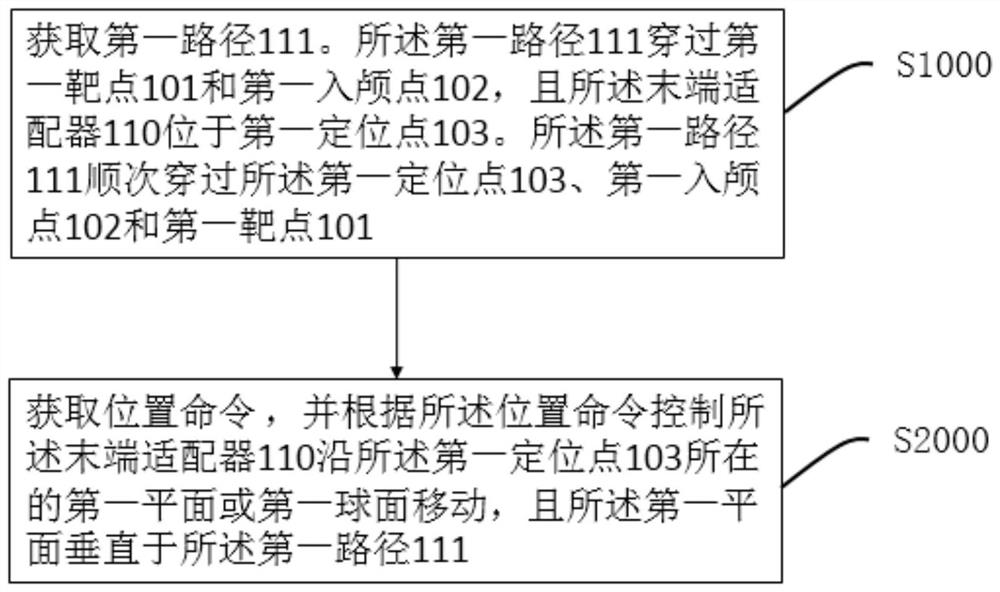
本申请涉及一种机械臂的末端适配器的控制方法。控制方法包括获取第一路径。第一路径穿过第一靶点和第一入颅点,且末端适配器位于第一定位点。第一定位点位于第一入颅点远离第一靶点的一侧。获取第二靶点的位置信息。根据第二靶点的位置信息和第一路径并得到包括第二靶点的第二路径。第二路径平行于第一路径。驱动末端适配器移动至第二定位点。第二定位点位于第二路径,且第二定位点与第二靶点间隔设置。所述控制方法通过定位第二靶点位置,并根据第二靶点的位置信息和第一路径得到第二路径,避免了重新进行建模、数据采集和路径规划,节约到了时间。即使靶点的位置多次发生变化,也能快速得到新的穿刺路径,提高了手术效率。
2023-08-21 -
一种用于螺杆加工的夹具
本发明公开了一种用于螺杆加工的夹具,包括操作板,所述操作板中部开有滑槽,所述滑轨内腔均活动插接有滑动插块,所述第二滑块和第一滑块顶端均通过连接杆固定连接有托座,所述缓冲口内腔底端通过弹簧固定连接有支撑角块,所述滑槽上侧的左右两侧分别设有第一夹头和第二夹头,所述螺杆底端活动套接有压头,所述压头底端开有上弧形槽,所述上弧形槽内腔底端固定粘接有弹性压板,所述滑槽后侧嵌有刻度尺,所述滑槽中部活动插接有拧动轴,所述拧动轴的顶端固定套接有旋钮。本发明只需拧动旋钮即可根据螺杆的长度快速精确调节第一夹头和第二夹头之间距离,采用三点式固定,能够达到提高夹紧效果和固定稳定性的效果。
2023-08-21 -
一种人工智能配送机器人的自动回旋装置
本发明公开了一种人工智能配送机器人的自动回旋装置,包括有机器外壳,所述机器外壳的底部固定连接有固定底壳,所述固定底壳的底部固定连接有底盖,所述底盖的顶部固定连接有固定套,所述固定套的内表面转动连接有转动轴,所述转动轴的外表面固定连接有齿轮,所述齿轮的顶部固定连接有转动筒,所述转动筒的顶端固定连接有转动柱,所述机器外壳的顶部固定安装有顶盖,本发明通过转动筒、转动柱、转动轴、隔板和扇形板之间的配合可以对货物进行分类存放,并且能够避免货物出现堆放的问题,再配合齿条和齿轮之间的配合可以方便实现对转动筒转动,使用者只要抽拉推动把手即可实现转动筒的转动,方便取放货物,提高了取货效率。
2023-08-21 -
一种翻转箱体内胆的机械手夹具
本发明公开了一种翻转箱体内胆的机械手夹具,涉及冰箱生产设备技术领域。本发明包括安装板;安装板滑动连接有上压板;并通过伸缩装置连接有下压板;上压板底壁远离安装板的一侧为楔形结构,并开设有若干安装孔,另一侧开设有与安装孔连通的滑动孔;安装孔内均间隙配合有顶杆;滑动孔内均滑动连接有滑动杆;顶杆一端为楔形结构,另一端通过压缩弹簧与滑动杆连接;滑动杆一端通过连接板固定有固定齿条;下压板的底壁靠近上压板的一侧为楔形结构,并与上压板底壁相配合。本发明通过上压板和下压板底壁间楔形结构的相互配合,使得上压板和下压板间相互夹紧内胆,实现对内胆的夹持,解决了现有内胆装夹不便的问题。
2023-08-21 -
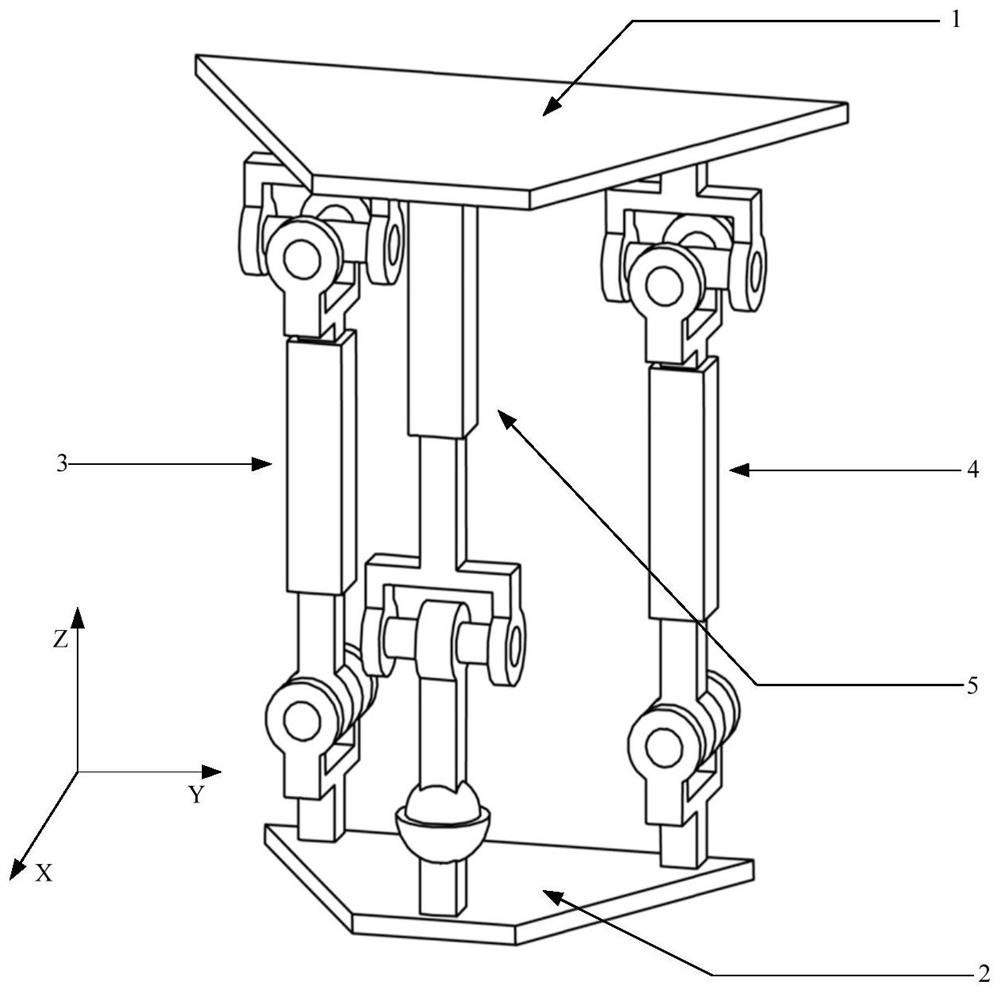
一种仅含转动关节的三自由度一平两转并联机构
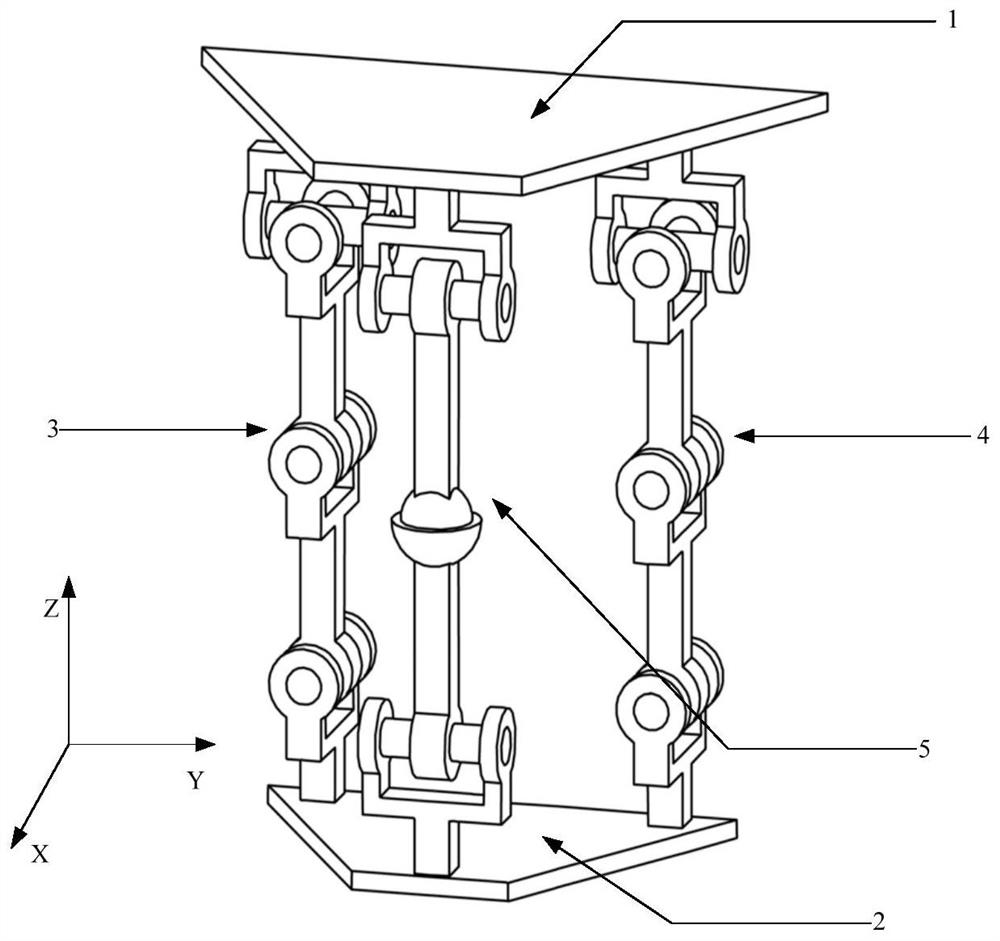
本发明公开了一种仅含转动关节的三自由度一平两转并联机构,所述仅含转动关节的三自由度一平两转并联机构包括:基座,与所述基座相对设置的动平台,连接所述基座与所述动平台的第一支链、第二支链以及第三支链;所述第三支链设置于所述第一支链、所述第二支链之间;所述第一支链与所述第二支链均包括多个运动副,所述运动副包括万向副、第一转动副以及第二转动副;所述第三支链包括第三转动副、球副以及第四转动副。由于本发明仅含转动关节,不用通过移动副进行驱动,从而可以有效避免因滑动摩擦导致的运动/力传递效率低的问题。
2023-08-21 -
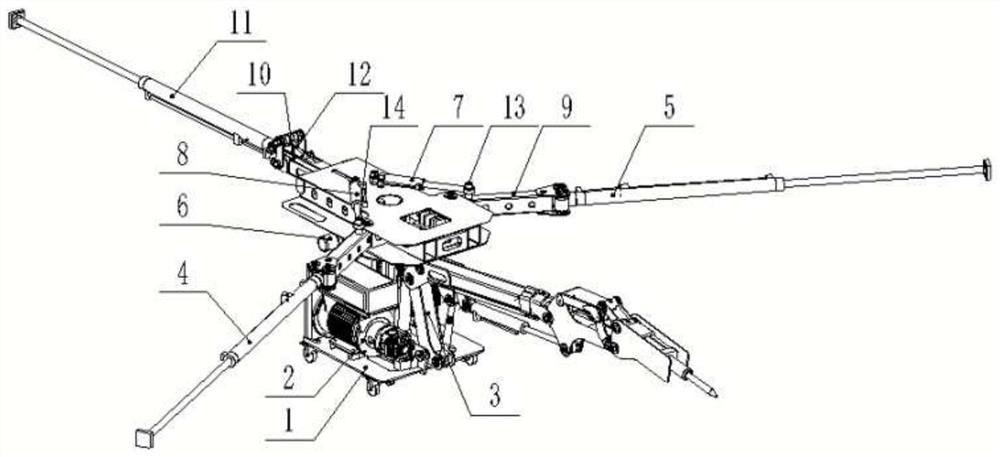
一种全承载客车消声器辅助安装工装
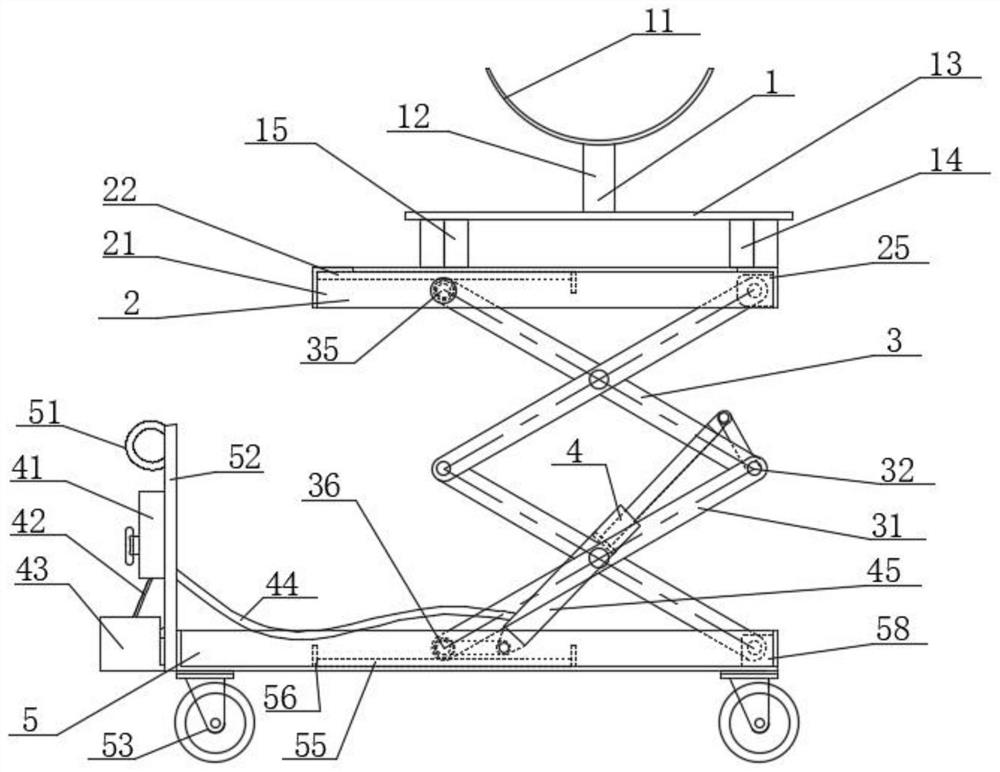
本发明公开了一种全承载客车消声器辅助安装工装,包括支撑定位机构、上支撑平台、转动升降连接臂总成、升降动力系统以及移动小车,所述支撑定位机构包括两个纵梁,两个所述纵梁的顶端均固定安装有支撑板,两个所述纵梁的下表面均固定连接有底板,两个所述底板的底端分别设置有第一限位块和第二限位块;转动升降连接臂总成上支撑平台中心线为中心对称分布,转动升降连接臂总成上端和下端分别通过销轴与上支撑平台与移动小车连接;连接臂可根据实际需要增加或减少,以适应不同升降高度要求,转动升降连接臂总成后侧上下两端安装有滚动轴承,以实现在导轨上前后滚动,从而实现整体上下升降。
2023-08-21 -
一种高空作业用防掉落内置刀头电动螺丝刀
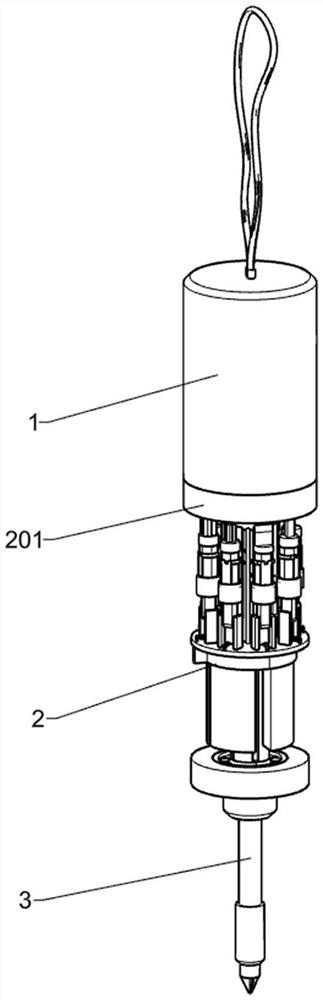
本发明涉及一种螺丝刀,尤其涉及一种高空作业用防掉落内置刀头电动螺丝刀。技术问题是提供一种同时内置多种螺钉头、能够根据手腕进行调节的高空作业用防掉落内置刀头电动螺丝刀。本发明的技术实施方案为一种高空作业用防掉落内置刀头电动螺丝刀,包括有螺丝刀杆、电机和更换机构,螺丝刀杆的下端设置有磁性槽,电机固定安装在螺丝刀杆的上端,更换机构与螺丝刀杆的中间部分转动连接。本发明通过加入了更换机构,实现了电动螺丝刀的内置多种刀头的功能,方便了电动螺丝刀的携带,避免了因螺丝刀头携带不全导致的维修作业的中止。
2023-08-21 -
带有防护部件的机器人
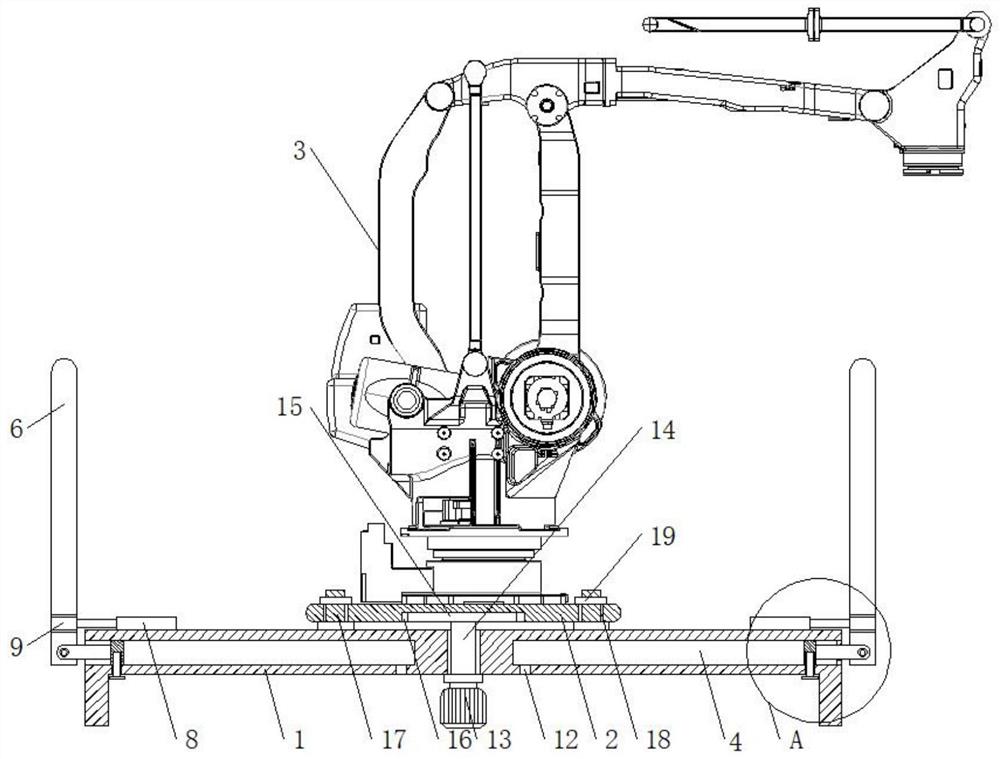
本发明公开了带有防护部件的机器人,涉及机器人技术领域,针对现有的机器人工作性能不佳的问题,现提出如下方案,其包括底座,所述底座的上方设有安装座,所述安装座的顶部设有机器人主体,所述安装座上设有连接机构,所述机器人主体通过连接机构固定在安装座的顶部,所述底座以机器人主体为轴心沿周向开设有多个容纳槽,所述容纳槽的内部均滑动连接有连接块,所述底座的外侧设有多个防护板,所述防护板与容纳槽相对应,所述连接块靠近防护板一侧的两端均固定有联接块。本发明可对机器人进行有效的防护,且可简单方便的对机器人的防护部件进行收纳,并且可灵活的对机器人的角度进行调节,具有良好的防护性能,使用方便,灵活度高。
2023-08-21 -
一种多功能机器人
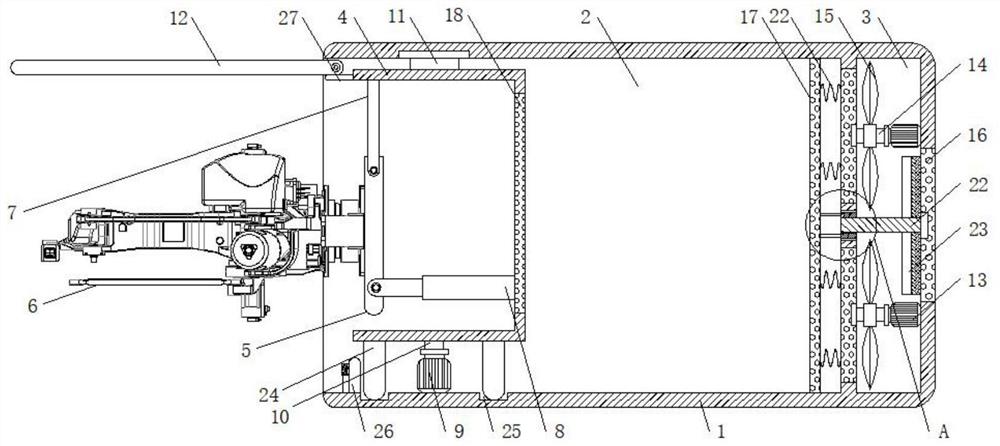
本发明公开了一种多功能机器人,涉及机器人技术领域,针对现有的机器人工作性能不佳的问题,现提出如下方案,其包括收纳壳体,所述收纳壳体为一端开口的箱体,所述收纳壳体的内部自左向右依次开设有收纳腔和散热腔,所述散热腔的内部设有散热部件,所述收纳腔的内部转动套设有连接块,所述连接块的内部设有安装座,所述安装座靠近开口的一侧固定有机器人主体,所述连接块顶部两端的内壁均固定有支撑块,所述支撑块的另一端通过铰链分别铰接在支撑块顶部的外侧。本发明可灵活的对机器人的角度进行调节,且可简单方便的对不需要使用的机器人进行快速的收纳防护,并且可对运行的机器人进行高效的散热工作,工作性能高,使用方便。
2023-08-21 -
用于机器人生产的工作台
本发明公开了用于机器人生产的工作台,涉及机器人加工用辅助装置技术领域,针对现有的使用成本高的问题,现提出如下方案,其包括工作箱,所述工作箱的中间转动连接有对称设置的支撑轴,且支撑轴的另一端固定套接有连接圈,所述连接圈的上、下两侧均固定连接有稳定板,所述连接圈上固定连接有两个第一电机,所述第一电机的输出端固定套接有主动轮,所述主动轮的外壁啮合连接有从动轮,所述从动轮的中间固定套接有与稳定板转动连接的工作轴,本发明结构简单,使用方便,可以在工作过程中,旋转、倾斜、翻转工作板,适应不同的工作需要,同时经过更换装置对不同工具的更换,保证不同工作的进行,进而减少不同装置的使用,节约采购成本。
2023-08-21 -
一种用于狭小空间内零部件底端固定螺母的扳手机构
本发明涉及装配工具技术领域,且公开了一种用于狭小空间内零部件底端固定螺母的扳手机构,包括固定套筒,所述固定套筒外部一侧的底部固定安装有手柄,所述固定套筒内腔的中部活动套接有活动套筒,所述活动套筒外表面的顶部设有安装卡槽,且活动套筒外表面的底部设有螺旋式线槽。该用于狭小空间内零部件底端固定螺母的扳手机构,对于螺旋式线槽螺旋线轨迹长度的设置,使其在一个旋转周期内,可以将螺母完全的拧到螺栓或螺杆上并脱离活动套筒上的螺母卡槽,而不会在发条的弹力回复作用下,使之又随着活动套筒发生螺旋式下降动作,进而造成螺母、弹垫以及平垫发生松动脱落的现象,进一步地提高了该扳手机构的稳定性及可靠性。
2023-08-21 -
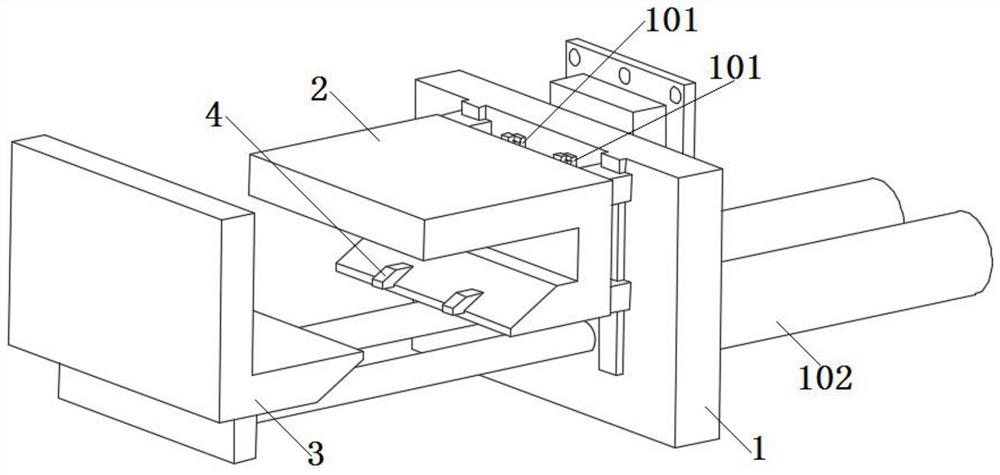
一种精密轴承压装机及其轴承压装方法
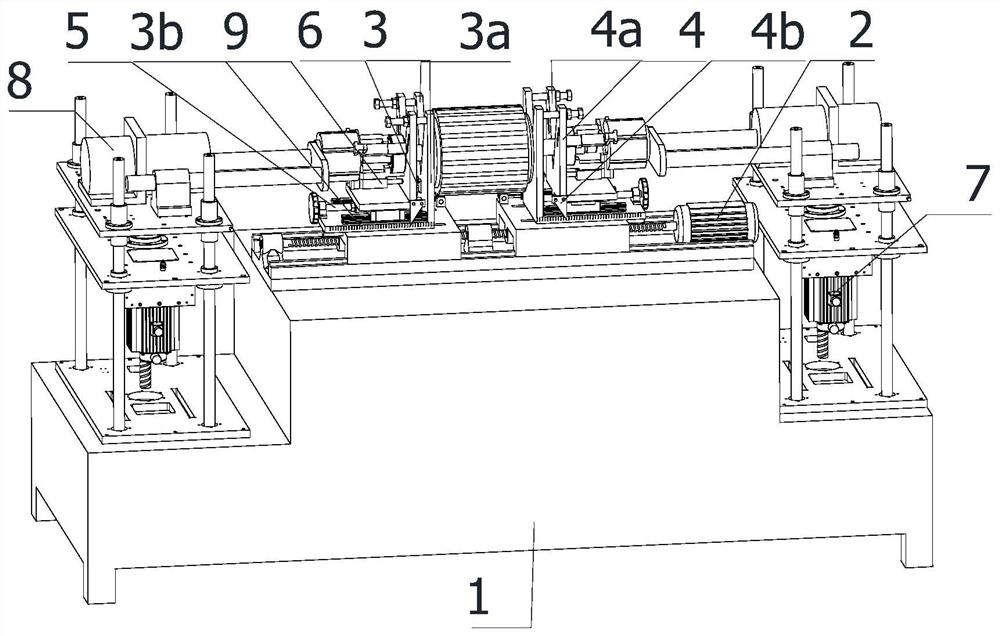
本发明涉及轴承压装技术领域,具体是涉及一种精密轴承压装机及其轴承压装方法,包括有:工作台;双工丝杆滑台,设置在工作台;L型固定板,设置在双工丝杆滑台双工工作端顶部,L型固定板纵板上设置有第一V型槽,所述L型固定板横板两侧设置有刻度;L型活动板,滑动设置在L型固定板,L型活动板纵板设置有第二V型槽,所述L型活动板横板一侧设置有指针;第一测距传感器,设置在L型固定板纵板内侧面;精准升降器,工作端竖直朝上设置在工作台两侧;压装机构,设置在精准升降器升降工作端,且所述压装机构工作端与第一测距传感器同竖直面;行程开关,同轴向设置在压装机构压装工作端,该装置适配压装不同种类的轴承,且精度更高。
2023-08-21 -
一种镀锡工装
本发明公开了一种镀锡工装,涉及镀锡件生产技术领域,包括工作台,所述工作台的上表面放置有镀锡件,且工作台的上表面固定固定连接有两个对称分布的压紧机构,所述压紧机构包括支撑板、安装块、转动板、凹型板、提手、提升块、卡紧块、连接块、伸长机构、U型块、螺纹杆、螺母和压紧块,所述支撑板的底端固定焊接有两个对称分布的安装块,本发明设有压紧机构,通过拉动提手从而可以快速的将镀锡件进行压紧,提升了后续加工操作的工作效率,并且装置设有伸长机构,我们通过进行组装插接块,从而可以改变U型块与转动板之间的距离,进而可以使得压紧块能与不同尺寸的镀锡件进行适配,提升了装置的适用性。
2023-08-21 -
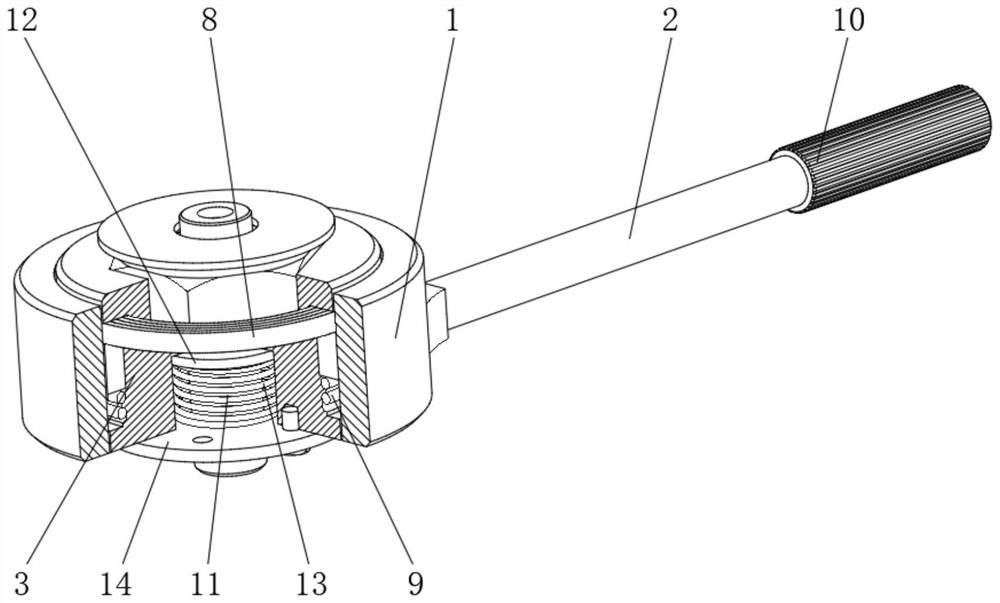
一种改良结构的无间隙主轴锁定装置
本发明公开了一种改良结构的无间隙主轴锁定装置,包括输出轴、动力输出盘、止动圈和锁定销,动力输出盘连接至驱动装置,输出轴一端设置为多面轴,多面轴包括锁定段和动力传递段,锁定段的周向设置有与锁定销配合的锁定平面;动力输出盘设置有用于传递动力的主动结构,动力传递段设置有用于传递动力的从动结构,主动结构与从动结构匹配;动力输出盘的表面沿圆周方向设置向上突起的间隔柱,相邻两间隔柱之间设置有阻尼块,锁定销设置于所述间隔柱与阻尼块之间,多面轴穿过间隔柱、阻尼块和锁定销形成的中孔以及动力输出盘,锁定销与锁定平面接触。本发明能有效减小急停的噪音,减小输出轴锁定角度,锁定可靠性高,整个结构装配难度低。
2023-08-21 -
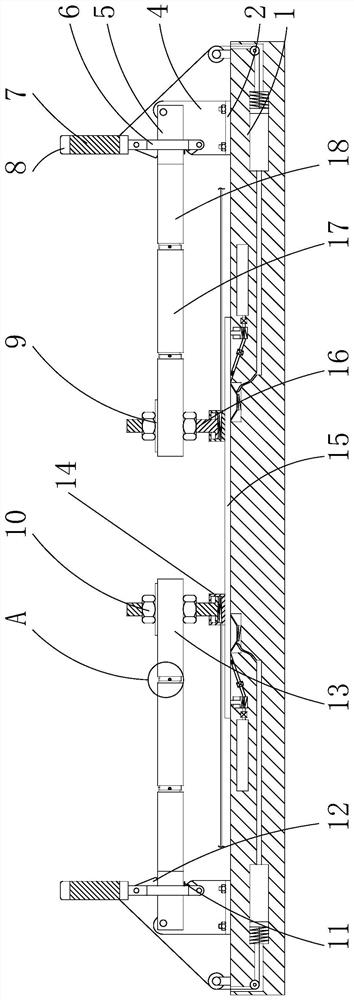
一种用于牵引电机橡胶节点压装的装置
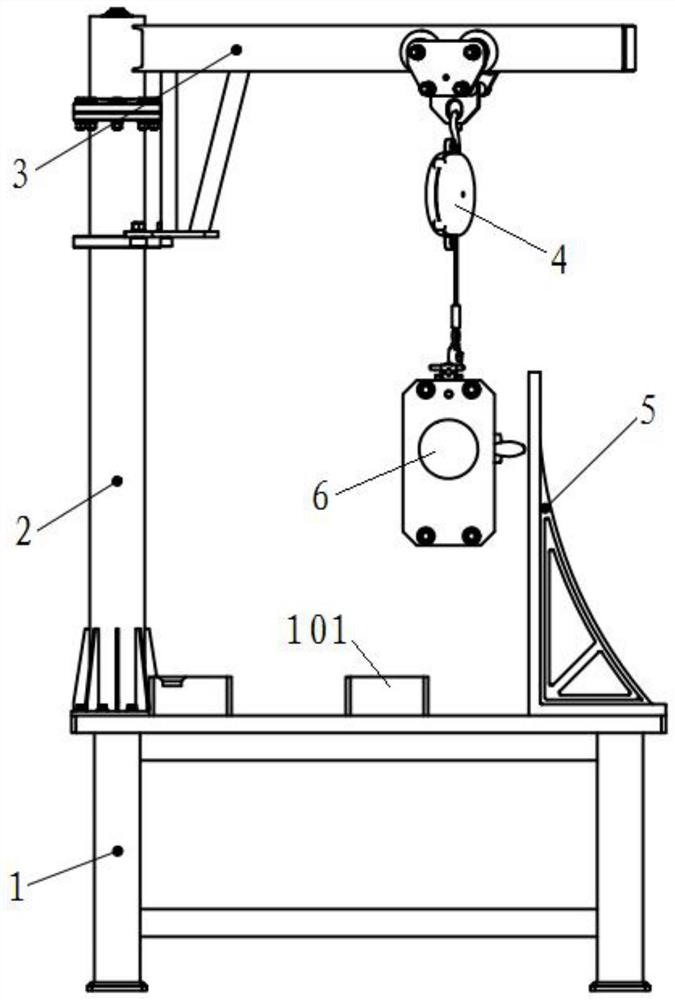
本发明公开了一种用于牵引电机橡胶节点压装的装置,包括工作台、悬臂立柱、吊车横梁,所述吊车横梁沿其长度方向上滑动连接有橡胶节点压装工装;所述橡胶节点压装工装通过所述吊车横梁调整水平位置和高度;牵引电机固定于所述工作台,所述牵引电机的牵引电机吊挂壁朝向所述橡胶节点压装工装延伸,且所述橡胶节点压装工装的压装端与所述牵引电机吊挂壁的吊挂孔同轴。本发明的装置能够将橡胶节点压入到牵引电机吊挂壁的吊挂孔内,并且在压入过程中牵引电机吊挂壁不受力,同时,该装置采用刚性较好的全封闭性结构,压装力通过装置自身内部消化,从而保证了装置的抗疲劳能力,提高耐用性。
2023-08-21 -
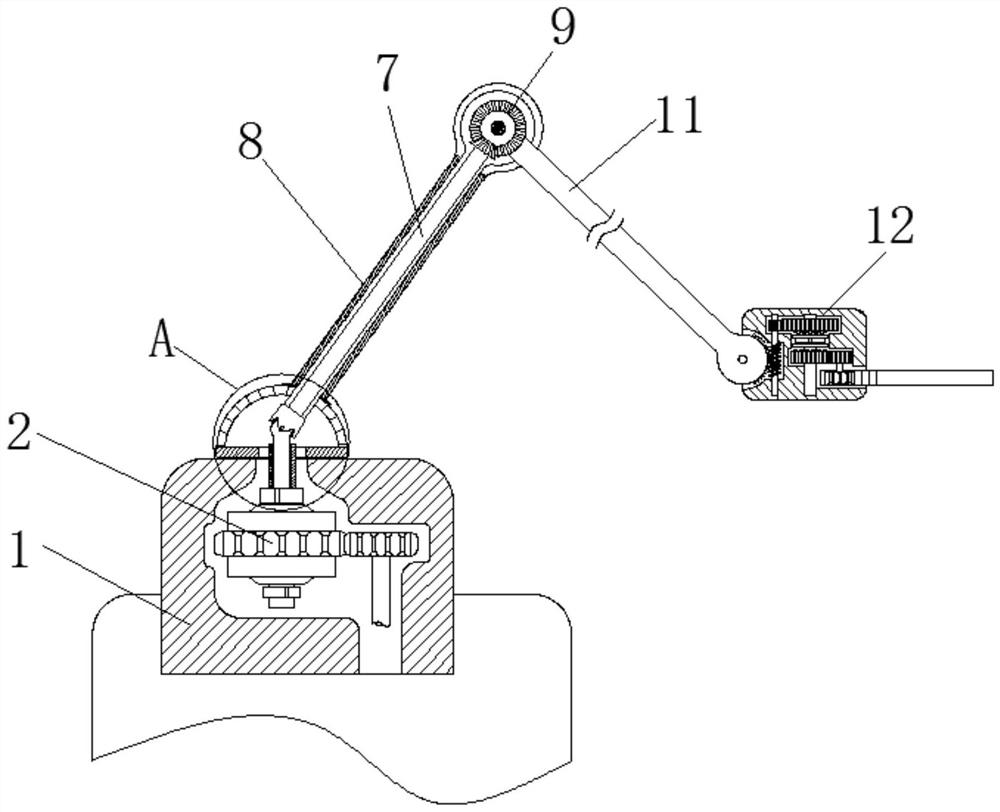
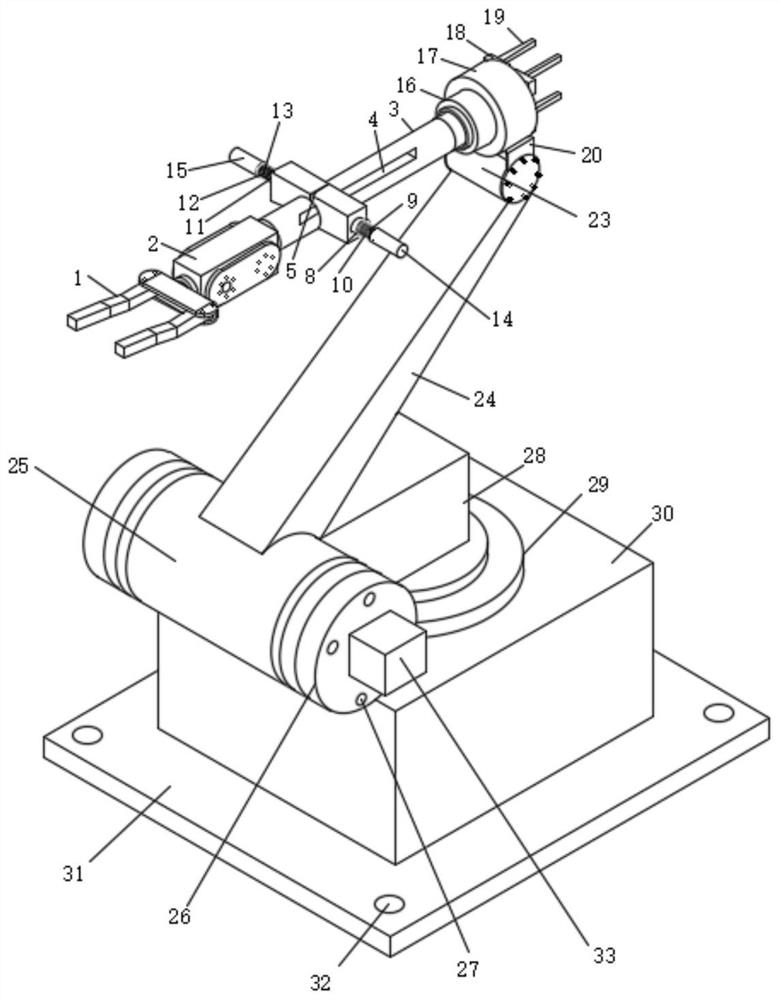
一种机械手击打桌球装置
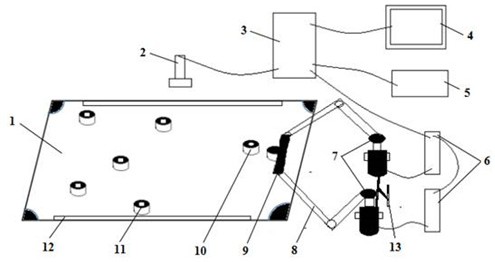
一种机械手击打桌球装置,由光滑桌面(1)、相机(2)、图像处理系统(3)、显示器(4)、运动控制器(5)、伺服驱动器(6)、伺服电机(7)、两自由度并联机械臂(8)、击球板(9)、母球(10)、目标球(11)、光源(12)和固定底座(13)组成,其特征在于:所述两个伺服电机(7)固定于固定底座(13),分别与两个伺服驱动器(6)连接,用于实现对两自由度并联机械臂(8)的控制;所述运动控制器(5)与图像处理系统(3)、两个伺服驱动器(6)依次采用EtherCAT内部高速总线串接,用于实现对整个击球过程的控制,本发明可以实现对桌球的准确击打,以提高桌球运动的挑战性和趣味性。
2023-08-21 -
一种机器人的远端控制方法、装置、设备和存储介质
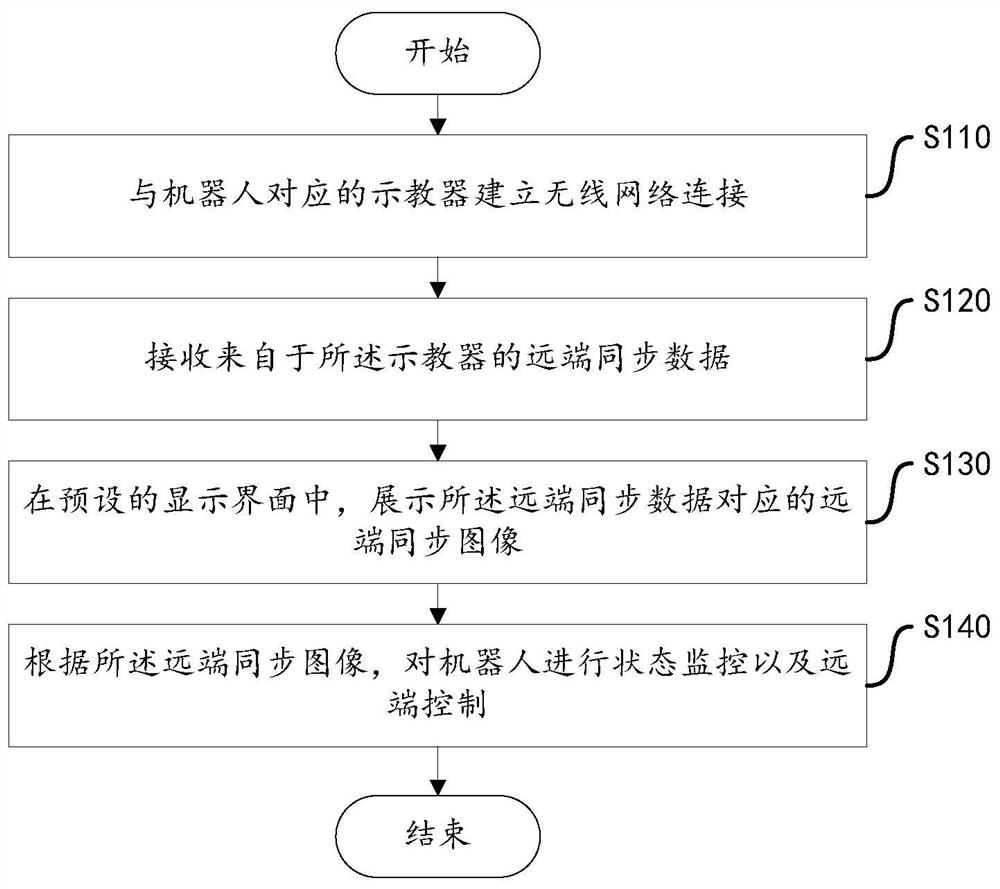
本发明公开了一种机器人的远端控制方法、装置、设备和存储介质。该方法在主控设备与机器人对应的示教器建立无线网络连接;接收来自于所述示教器的远端同步数据;在预设的显示界面中,展示所述远端同步数据对应的远端同步图像;根据所述远端同步图像,对所述机器人进行状态监控以及远端控制。在本发明在主控设备对机器人进行状态监控和远程控制,无需操作人员在现场对示教器进行一对一控制的问题,在远端即可对操作示教器,对机器人进行监控,观察、记录机器人的运行状态,做到了人机分离和远端控制,提高了生产的安全性,机器人控制的灵活性较高。
2023-08-21 -
机械手夹紧结构
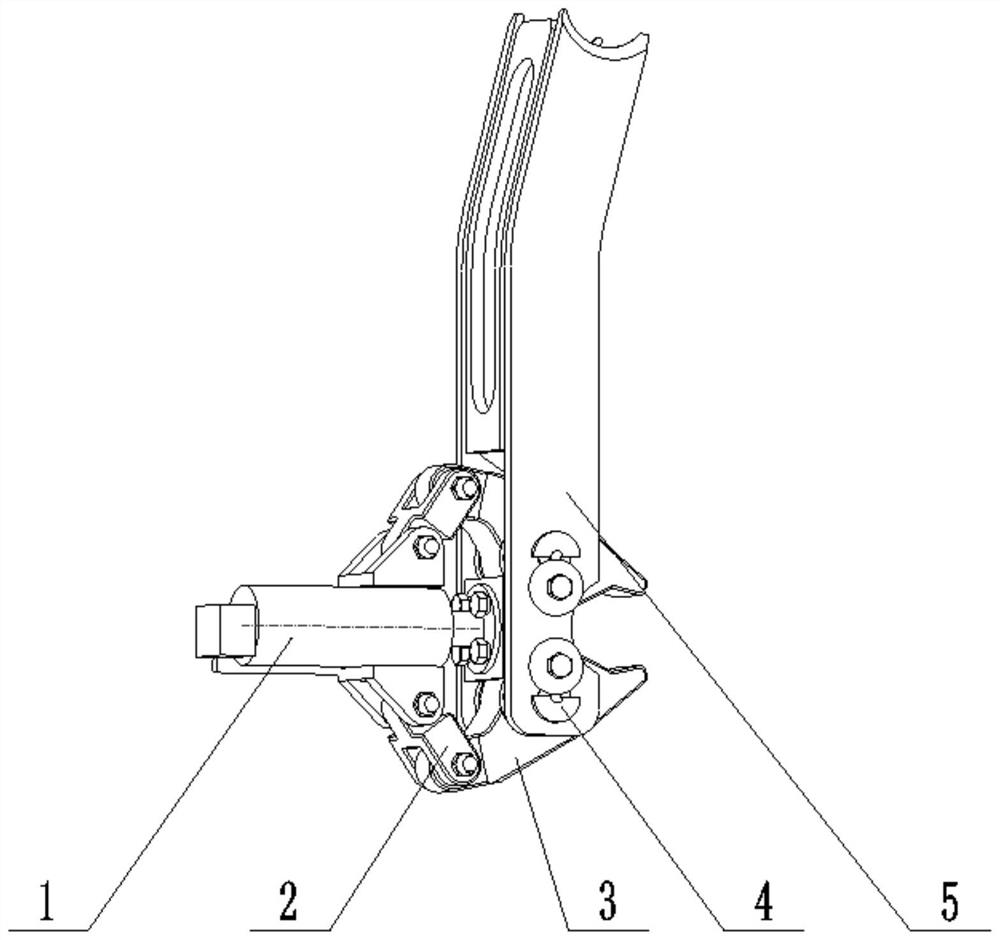
本发明公开了一种机械手夹紧结构,其中,该机械手夹紧结构包括油缸部件、连接部件、夹紧部件、回转销轴和机械臂,通过将油缸部件的一端固定在机械臂上,油缸部件通过连接部件与夹紧部件的第一端连接,夹紧部件的第二端通过回转销轴铰接在机械臂上,以使夹紧部件绕着回转销轴旋转,实现机械手的开合,夹紧部件在油缸部件的作用下,对物料执行夹紧操作。使其对物料执行夹紧的操作较灵活,提高了机械手的灵活性,且自由度较大,同时夹紧部件绕着回转销轴旋转,使其夹紧力较大,实现了对物料更好的夹紧。进而提高了机械手的实用性。
2023-08-21 -
一种内外副联合驱动的并联机构
本发明公开了一种内外副联合驱动的并联机构,所述内外副联合驱动的并联机构包括:基座,动平台,第一支链,第二支链以及第三支链;所述第一支链与所述第二支链结构相同,均包括与所述基座连接的万向副,与所述动平台连接的第一转动副,与所述万向副、所述第一转动副均连接的第一移动副;所述第三支链包括与所述基座连接的第二移动副,与所述动平台连接的球副,与所述球副、所述第二移动副均连接的第二转动副;所述第一移动副与所述第二移动副为驱动副。本发明通过将作为中间杆件的所述第一移动副,以及与所述基座直接相连的所述第二移动副均设置为驱动副,从而有效地提高并联机构整体的刚度。
2023-08-21 -
一种用于复合材料机翼壁板的保形定位工装
本发明公开了一种用于复合材料机翼壁板的保形定位工装,属于飞机制造技术领域,其技术方案要点包括固定架,所述固定架的顶部设置有控制柜,还包括有导向机构、横移机构、调节机构和定位机构;所述导向机构包括连接轨,所述连接轨的一侧通过螺栓固定连接有数量为两个的横向导轨;所述横移机构包括滑配在横向导轨上的U型框,所述U型框的内壁设置有沿着横向导轨延伸方向移动的两组滚轮,所述U型框的底部固定安装有第一电机,所述第一电机的输出轴贯穿U型框并与其中一个位于下方的所述滚轮固定连接;本发明便于在拼接时,对壁板的位置进行调整,无需解除固定再重新固定,降低工作强度,且操作更加安全可靠。
2023-08-21 -
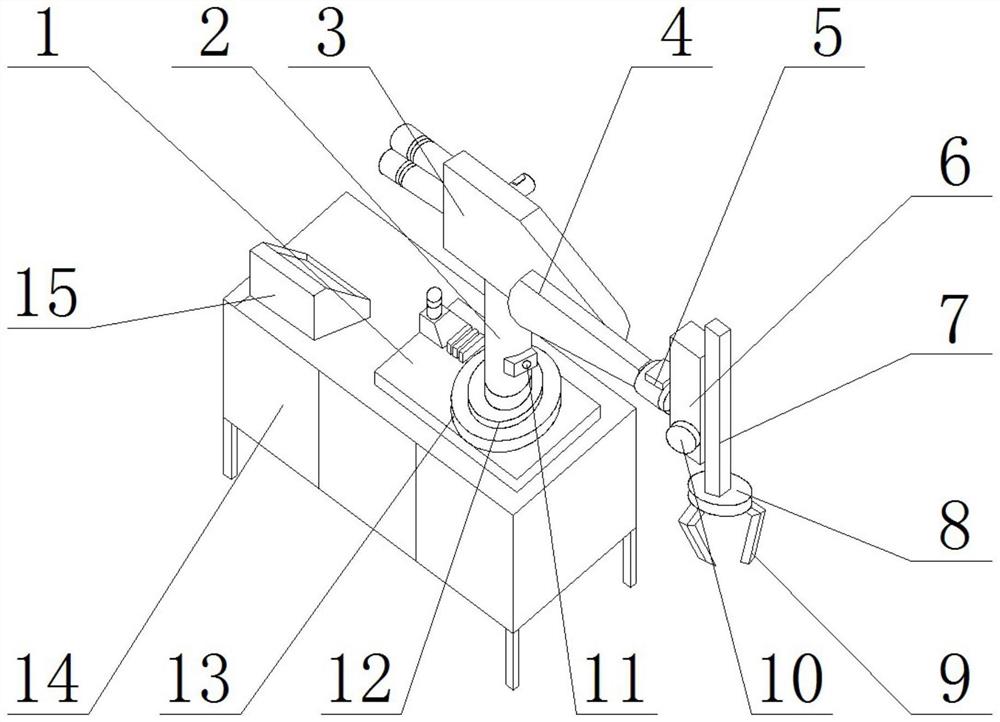
一种基于机器视觉的气密性自主行走机器人
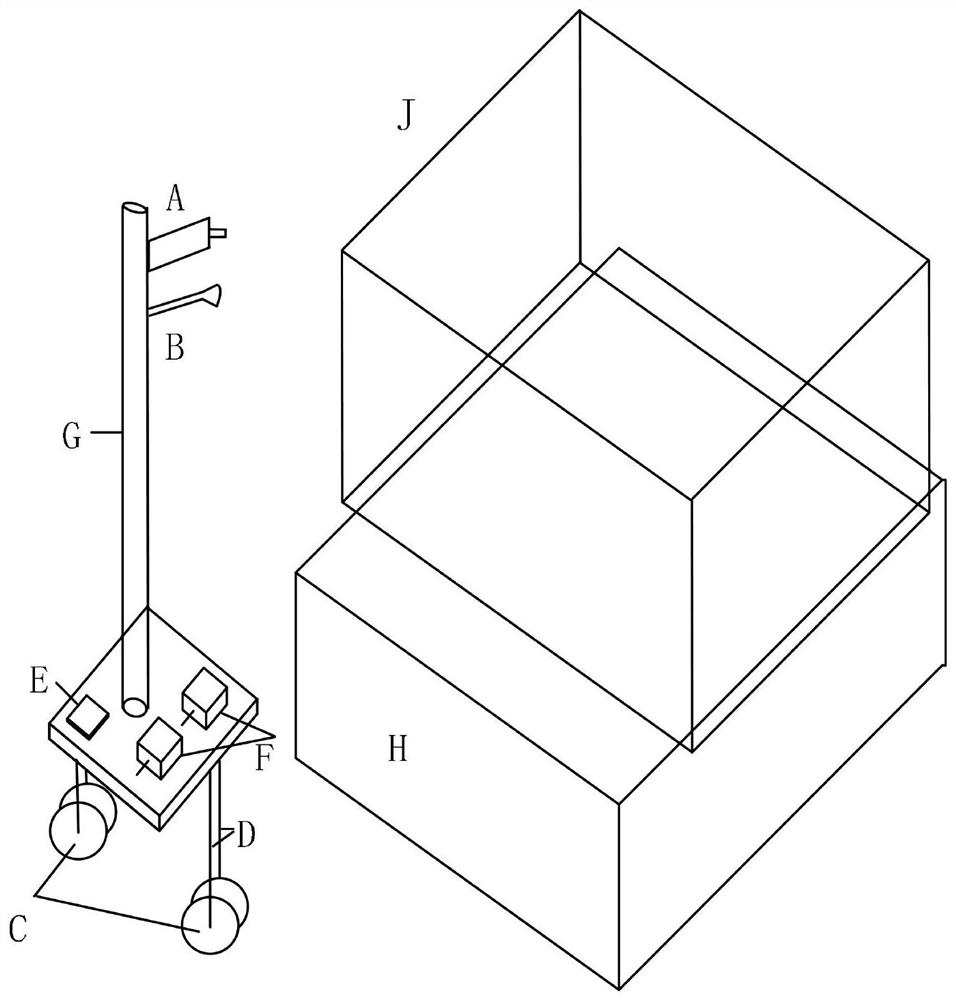
本发明公开了一种基于机器视觉的气密性自主行走机器人。本发明包括自主行走轮组、步进电机、控制器、升降支架、皂液涂刷装置B、工业相机、光学照明组件和计算机。自主行走轮组安装在移动导轨中,能够在移动导轨上左右移动;两个步进电机和一个控制器设置在平台板上表面,平台板下表面与自主行走轮组固定连接;两个步进电机分别用于驱动机器装置的左右移动以及升降支架的上下移动;从而带动工业相机和皂液涂刷装置的上下左右移动。本发明利用高像素CCD相机所采集的图像,经漏点图像特征辨识,实现漏点的精确定位和漏率估算,从而代替传统人工气密性检验作业,减少对检测人员专业技能要求,防止漏检和误检现象发生。
2023-08-21 -
便携式多功能板手
本发明属于电力系统技术领域。便携式多功能板手,其特征在于包括板手头、可弯曲管、把手;板手头由可弯曲管与把手相连接;板手头包括筒体、钢针、盖板、弹簧,筒体的下部为空腔,筒体内的上部设有多个钢针伸缩通孔,钢针伸缩通孔的下端与空腔相连通;钢针的个数与钢针伸缩通孔的个数相同,所有钢针均位于筒体内,钢针的上端部穿入钢针伸缩通孔内,弹簧位于钢针伸缩通孔内,弹簧的下端与钢针的上端面固定连接,弹簧的上端与盖板的下端面固定连接,盖板位于筒体的上端面上,盖板与筒体固定连接。本发明适用范围广、使用方便。
2023-08-21 -
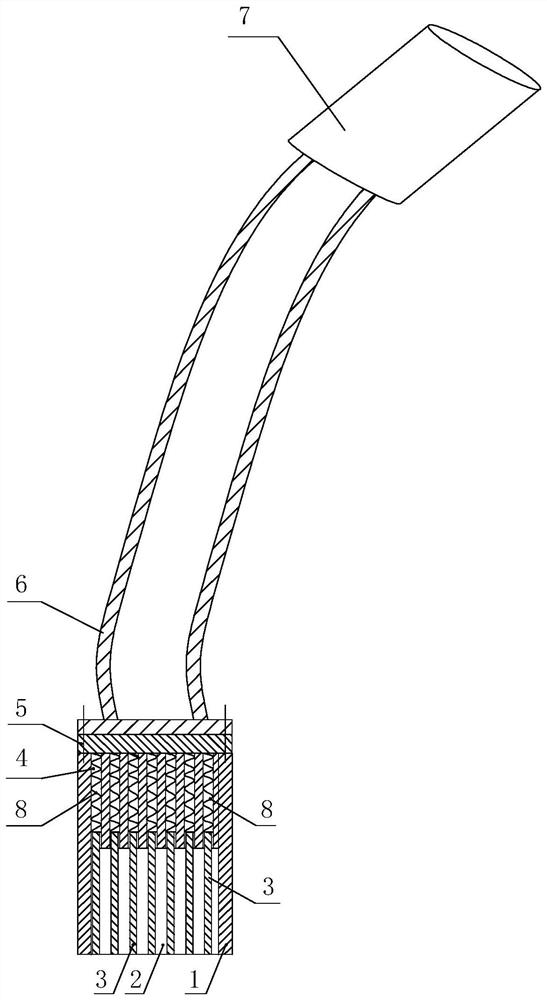
一种可调节性袋笼连接装置和连接方法
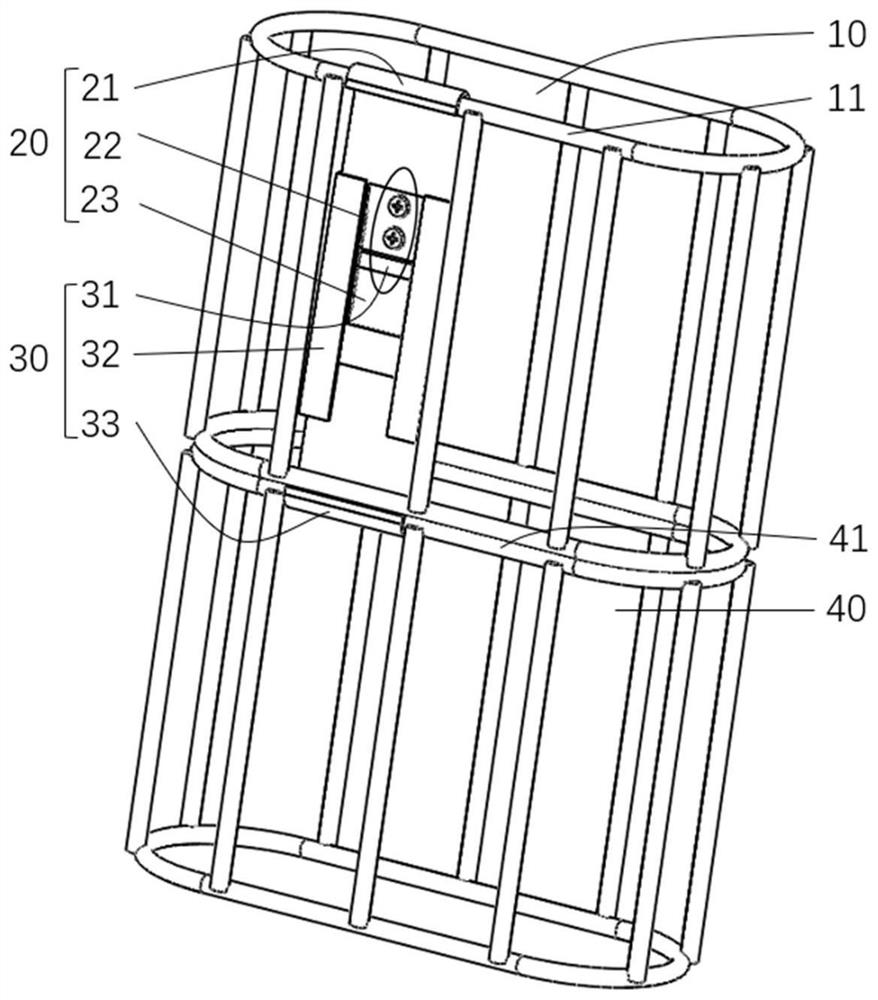
本发明提供了一种可调节性袋笼连接装置,包括:上爪构件,下爪构件;上爪构件包括直齿齿条、上钩爪和矩形通槽,直齿齿条插入下爪构件的固定轨道中,实现上下滑动;上钩爪与上节袋笼的横筋钩接;下爪构件包括弹性片模组、固定轨道和下钩爪,弹性片通过螺钉螺母与下钩爪的非钩爪部分的那一端部连接;弹性片是呈一定夹角的V形构件,其分为与直齿齿条平行的第一部分,和与第一部分呈一定夹角的第二部分;第二部分的端部与上爪构件的直齿齿条相啮合;固定轨道限制直齿齿条在水平方向上的移动;下爪构件钩爪部分与下节袋笼的横筋钩接。本发明还提供了上述连接装置的连接方法。
2023-08-21 -
一种工业智能化六轴机器人
本发明公开了一种工业智能化六轴机器人,包括第一横板、滑板和壳体,所述第一横板的滑槽处滑动卡接有滑板,所述滑板的上表面固接有壳体,所述第一横板的上表面左侧安装有移动装置。该工业智能化六轴机器人,通过驱动电机带动固定圆盘,圆盘上的滚子配合移动框将圆周运动转化为往复循环的直线运动,推杆在移动框的带动下与壳体的外壁固定相连,从而带动壳体进行循环往复移动,实现了机械手的来回位移和复位,通过T形转盘、转轮、第二支板第二梯形板和第二电机等结构之间的相互配合,可以通过第二电机的输出轴带动T形转盘进行转动,T形转动带动机械臂的转轴进行转动,从而达到使机械臂的方向进行转动的目的。
2023-08-21 -
一种立桶库清结皮清渣机器人
本发明公开了一种立桶库清结皮清渣机器人,包括回转平台和上平台,所述回转平台和上平台通过回转驱动且使用高强度螺栓固定连接,所述回转平台前方固定连接有工作装置,所述回转平台内部安装有动力系统,所述上平台的上端通过折叠油缸销轴分别转动连接有第一折叠油缸、第二折叠油缸。本发明通过设置工作装置、动力系统、上平台、折叠油缸和伸缩油缸,可以使设备具有很好的打击效果,当设备到达工作地点时,使得伸缩臂总成伸出,扩大打击范围,使得设备具有很好的清渣效果,同时电机通过液压传动来控制上平台的伸缩油缸,让上平台的伸缩油缸可以伸出与收回,使得设备具有很好的运输空间。
2023-08-21 -
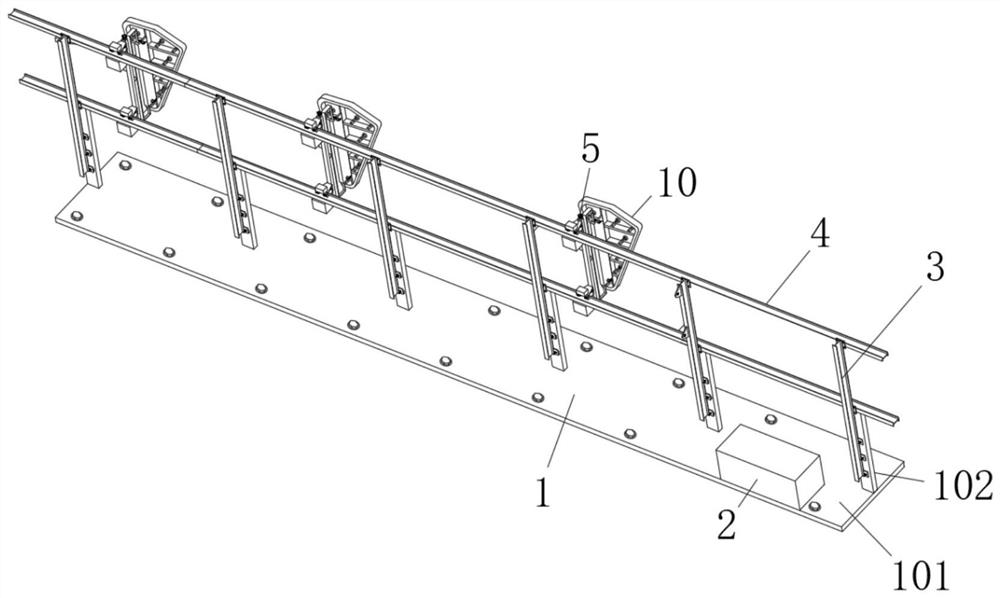
一种将塔器安装于冷箱内的安装方法
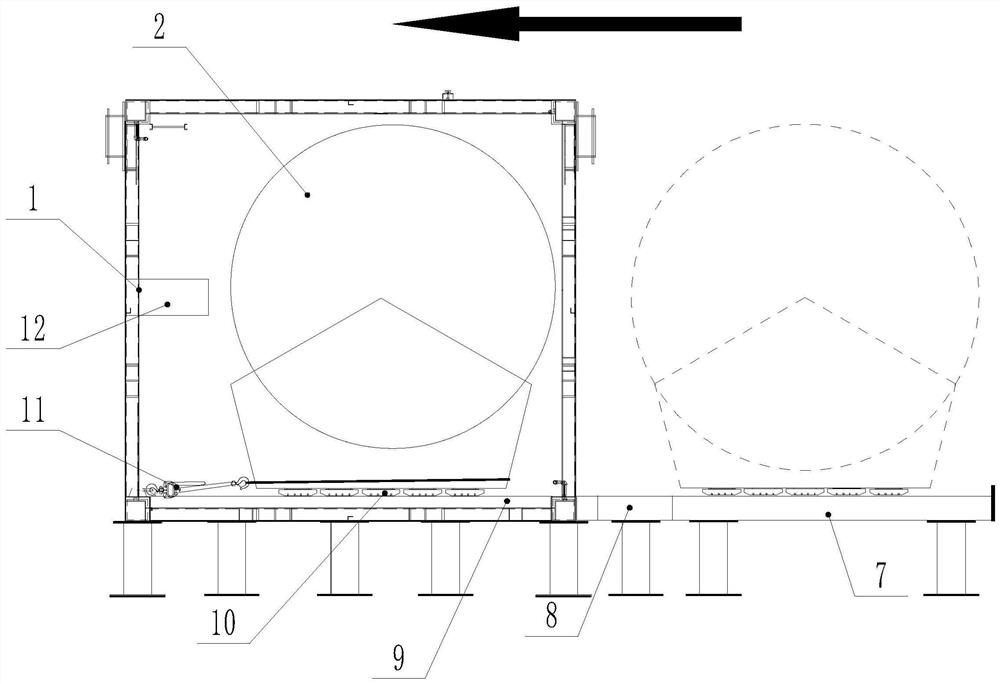
本发明公开了一种将塔器安装于冷箱内的安装方法,包括以下步骤:S1、将塔器送至车间场地内;S2、塔器卸货;S3、焊接滑移鞍座和临时固定鞍座;S4、放置支撑墩,支撑墩上设置有第一导轨;在滑移鞍座的下方设置第一地坦克;S5、将第一地坦克放置在第一导轨上;S6、焊接衔接轨道;S7、利用牵引装置牵引塔器使其移动到冷箱钢结构内;S8、设置第二顶升座;S9、第二顶升座顶升使塔器抬高;S10、移除滑移鞍座和第二轨道;S11、焊接正式鞍座和正式支撑架;S12、第二顶升座下降使正式鞍座放置在正式支撑架上;S13、移除临时鞍座和运输鞍座。该安装方法利用平移的方式将塔器安装至冷箱内,车间高度无要求,施工面积也大大降低。
2023-08-21 -
一种具有检测功能的机械手挂钩设备
本发明涉及机械手挂钩设备技术领域,公开了一种具有检测功能的机械手挂钩设备,包括机械手爪,所述机械手爪的一端固定连接有转接块,所述转接块的一端固定连接有机械杆,所述机械杆的外表面开设有滑槽,所述滑槽的外表面滑动连接有挂钩,所述挂钩的一端设置有第一弧形连接块,所述挂钩的另一端设置有第二弧形连接块。本发明具有以下优点和效果:第一弧形连接块的一侧设置有滑柱,第二弧形连接块的一侧设置有与滑柱相适配的连接孔,通过滑柱与滑槽之间滑动连接,达到了便于调节挂钩自身在机械杆上的位置,也方便使用者操作使用,通过转动第一连接套杆和第二连接套杆即可达到便于调节挂钩自身长度的目的。
2023-08-21 -
一种汽车前围板加工用夹持机构及其夹持方法
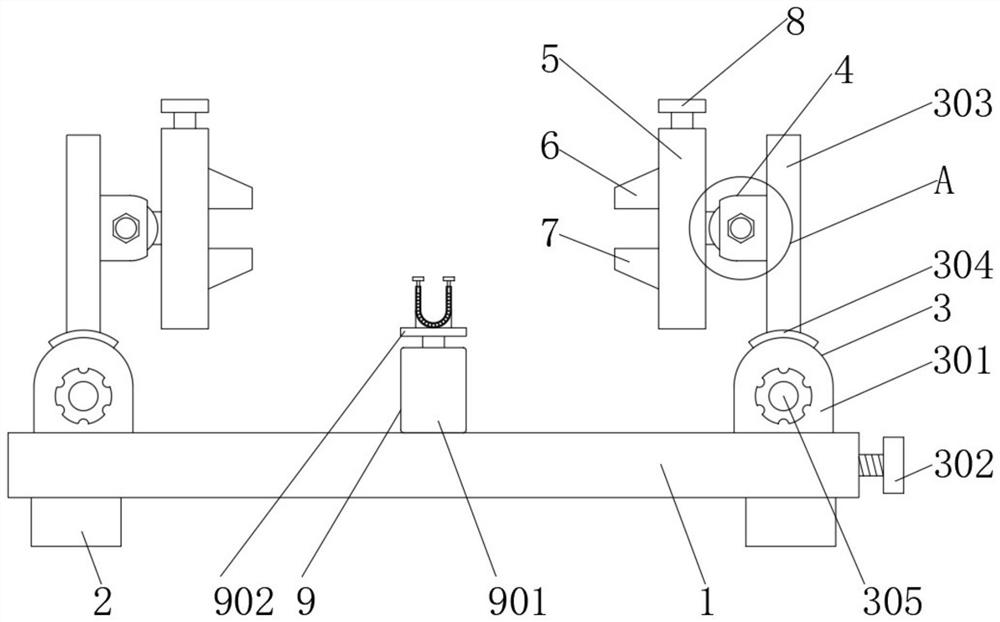
本发明公开了一种汽车前围板加工用夹持机构,包括底座,底座的底部固定安装有支腿,所述底座的上部设有位置调节机构,所述位置调节机构包括有调节座、第一丝杆、调节板、限位弧块、第二丝杆、支撑座、左旋螺纹和右旋螺纹,所述调节板通过角度调节机构活动连接有夹座,所述角度调节机构包括有球座、万向球、压紧螺栓和连接杆。本发明所述的一种汽车前围板加工用夹持机构,具备优异的调节功能,大大的提高了夹持机构的适用范围,其次,方便对夹持角度进行调节,避免前围板的边缘处有折弯时无法进行夹持的现象,此外能够起到优异的支撑功效,避免前围板在加工的时候因自身重力导致产生整体形变的现象。
2023-08-21 -
一种工业机器人抓取识别系统及其使用方法
本发明公开了一种工业机器人抓取识别系统,包括工作台,所述工作台的上表面左侧固定安装有操作台;触觉感应器能感应到物品的抓握状态,当出现空抓或者物品掉落时,工业机器人能够第一时间感知到,提高了工业机器人的运转效率,同时避免了工业机器人空转导致的流水线故障,同时通过三组机械爪机械抓握,配合吸盘吸附,大大提高了抓握稳定性,避免了掉物的发生,同时也提升了机械爪的承重能力,使得机械爪能抓握住更重的物品,当工业机器人出现故障时或者加工流水线出现故障时,第一制动器与第二制动器第一时间对工业机器人进行制动,避免了机器故障而工业机器人继续运转造成的安全事故,提高了生产安全性。
2023-08-21 -
一种工业机器人夹持部件
本发明公开了一种工业机器人夹持部件,属于机器人设备技术领域,包括两个夹板,两个夹板相靠近一端均开凿有十字槽,两个十字槽内设置均有卡位机构有,位于左部的夹板的上端固定连接有第一固定板,位于左部的夹板的下侧设置有翻转机构,位于右部的夹板的上端固定连接有两个第一固定块,两个第一固定块的上端均固定连接有齿条,两个齿条均贯穿第一固定板,第一固定板的左侧设置有驱动机构和限位机构,两个齿条的下端均固定连接有三角连接杆,最终可以实现便于机器人夹持不规则形状的物品,且夹持住在运送途中防止物品脱落,实用性极强。
2023-08-21 -
智能绘画机器人的绘画引导方法、芯片及智能绘画机器人
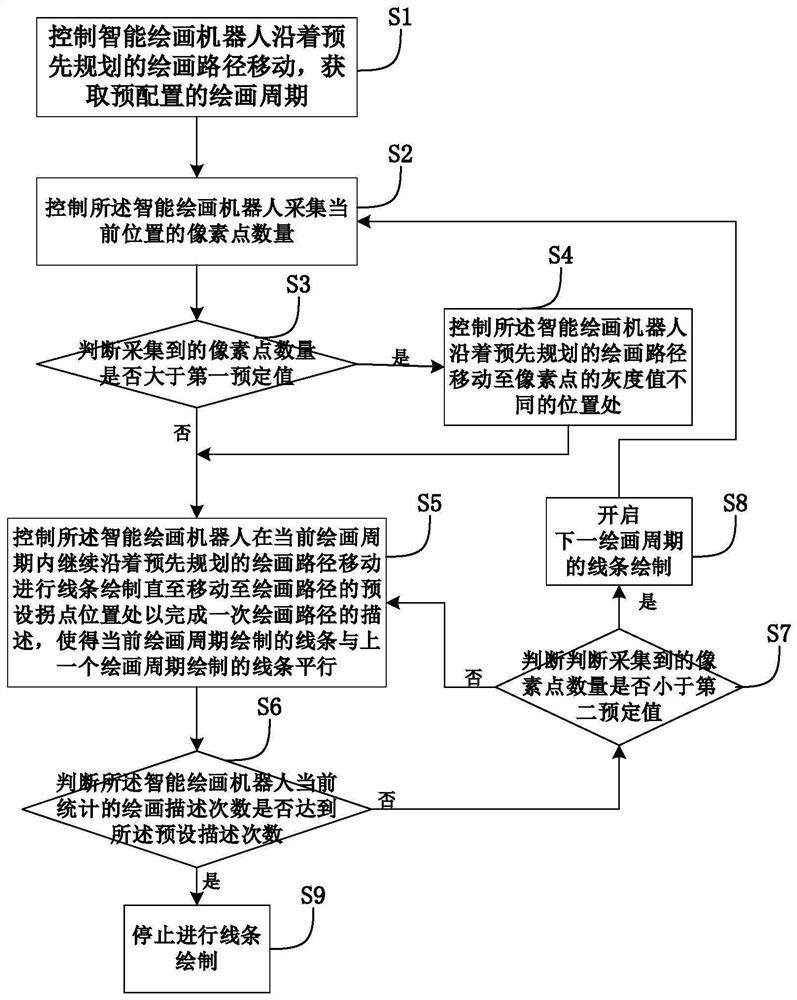
本发明公开智能绘画机器人的绘画引导方法、芯片及智能绘画机器人,该绘画引导方法包括:步骤1、控制智能绘画机器人沿着预先规划的绘画路径移动,获取预配置的绘画周期;步骤2、控制所述智能绘画机器人在当前绘画周期内继续沿着预先规划的绘画路径移动进行线条绘制直至移动至绘画路径的预设拐点位置处以完成一次绘画路径的描述,使得当前绘画周期绘制的线条与上一个绘画周期绘制的线条平行,然后进入步骤3;步骤3、判断所述智能绘画机器人当前统计的绘画描述次数是否达到所述预设描述次数,是则停止进行线条绘制,否则返回步骤2。让智能机器人具备绘画空间层次感的线条的能力,比人类更加准确快速地绘画轮廓线。
2023-08-21 -
智能绘画机器人的绘画控制方法、芯片及智能绘画机器人
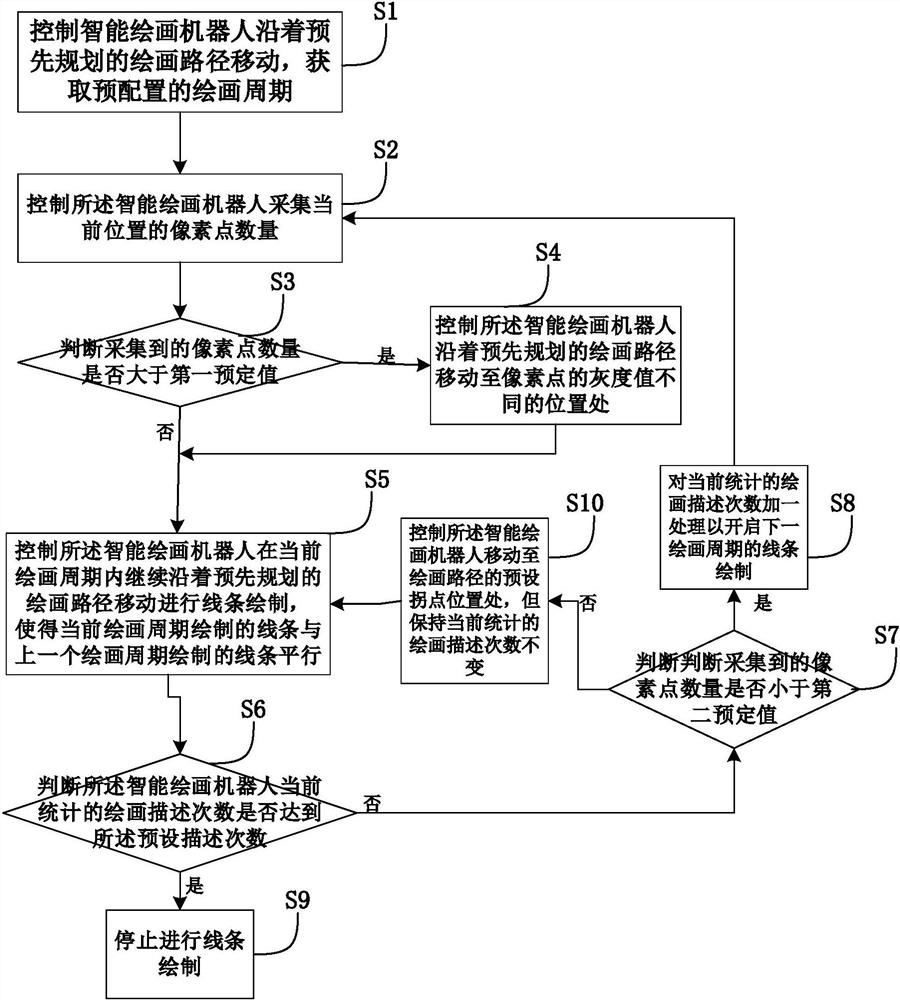
本发明公开智能绘画机器人的绘画控制方法、芯片及智能绘画机器人,该绘画控制方法包括:步骤1、控制智能绘画机器人沿着预先规划的绘画路径移动,获取预配置的绘画周期;步骤2、控制所述智能绘画机器人在当前绘画周期内沿着预先规划的绘画路径移动进行线条绘制,使得当前绘画周期绘制的线条与上一个绘画周期绘制的线条平行;步骤3、判断所述智能绘画机器人当前统计的绘画描述次数是否达到所述预设描述次数,是则停止进行线条绘制,否则返回步骤2;其中,所述智能绘画机器人每经历一个绘画周期,则对所述智能绘画机器人当前统计的绘画描述次数加一处理。让智能机器人同时具备绘画空间层次感和完整性的轮廓线的能力,用于模仿人类绘画轮廓线。
2023-08-21 -
一种机器人的行动纠偏系统及其方法
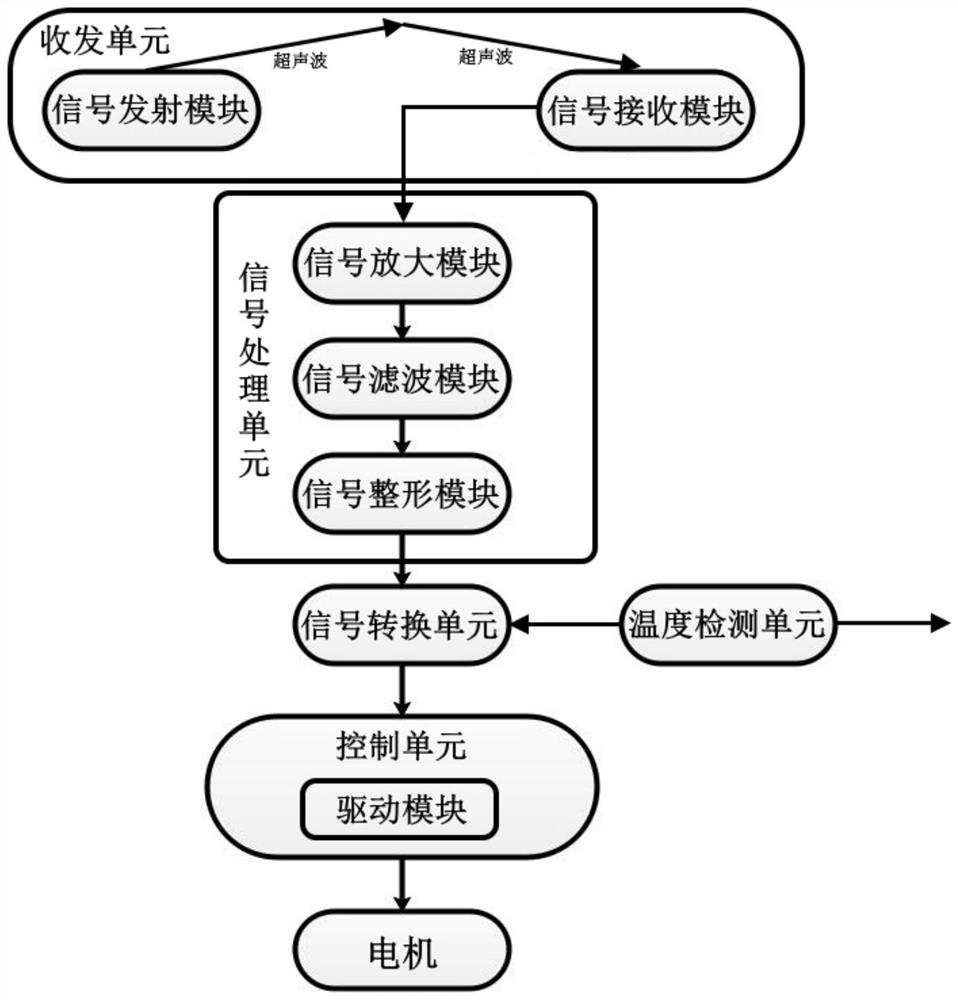
本发明涉及机器人行动领域,公开了一种机器人的行动纠偏系统及其方法,包括:用于进行超声波信号发射与接收的收发单元;用于进行外部环境温度检测的温度检测单元;用于进行超声波信号的检测和稳定的信号处理单元;用于进行信号转换的信号转换单元;以及用于进行信号控制机器人纠偏工作的控制单元;本发明利用超声波进行距离检测,从而可以有效的完成机器人在恶劣条件下的工作,同时利用温度检测可以减小超声波的温差,从而提高检测的准确性,从而可以提高机器人的工作效率。
2023-08-21 -
一种圆形铸造零件支撑工装
本发明是一种圆形铸造零件支撑工装,包括底座,底座上设有第一U型槽,第二U型槽,第三U型槽;第一U型槽、第二U型槽和第三U型槽上设有螺纹孔,螺纹孔内拧入螺栓,螺栓上螺合有螺母,在螺栓上套设有压片,压片中部设有腰型孔。底座上设有定位柱。底座上设有避让凹槽。依据零件结构在平台上设计圆弧支撑点,使零件装夹更稳定。在零件内部设计压点,避免刀具干涉。使复杂零件在一次装夹中,完成各个面的加工,方便找正,装夹稳定,提高加工效率。
2023-08-21 -
一种基于巡逻机器人用的保护装置
本发明公开了一种基于巡逻机器人用的保护装置,涉及巡逻机器人领域,针对巡逻机器人在工作过程中不能保护壳体在碰撞中免受损伤,以及停止工作后不能保护探测头减少灰尘堆积的问题,现提出如下方案,包括壳体,所述壳体的底部内壁固定连接有驱动电机,所述驱动电机的输出轴固定连接有第一转轴,所述第一转轴的外部固定套设有第一皮带轮和第二皮带轮,所述第一皮带轮的外部套设有第一传送皮带。本发明不仅可以通过安装缓冲装置,避免巡逻机器人的壳体造成损伤,而且还可以通过控制挡板遮住探测头,减少探测头表面灰尘堆积,同时排风扇转动还可以快速对壳体内部进行降温,避免温度过高,影响零件的正常运转。
2023-08-21