一种平口机进料机构
文献发布时间:2023-06-19 19:33:46
技术领域
本发明涉及平口机技术领域,尤其是一种平口机进料机构。
背景技术
平口机是用于车平物料的设备,如保温杯杯底,在其生产出来后料边会具有毛料,需要通过平口机车平毛料,包括保温杯的内底和外底。
使用时,需要将物料放置到平口机相应部位处,因需要车平的物料通常具有沿边91,如图15所示,而平口机的物料安置部位92通常为横向设置,如图16所示,因此,自动化上料较为困难,现有技术中物料的上料操作通常由人工完成,基于该技术难点,申请人提出本申请。
发明内容
本发明针对现有技术中的不足,提供了一种平口机进料机构。
为解决上述技术问题,本发明通过下述技术方案得以解决:
一种平口机进料机构,包括
支架体,其包括有用于支撑堆叠物料的第一平台和用于支撑单一物料的第二平台;
定位单元,其包括配置于所述第一平台上方用于定位堆叠物料的第一定位件以及配置于所述第二平台上方用于定位单一物料的第二定位件;
第一抓取单元,其包括第一抓取件以及驱动所述第一抓取件纵向和/或横向移动的第一驱动单元,用以将物料从第一平台抓取至第二平台上;以及
第二抓取单元,其包括具有轨道的架体、活动于所述轨道上的第二抓取件以及用以驱动所述第二抓取件活动的第二驱动单元,所述轨道包括供所述第二抓取件纵向活动的第一轨道、供所述第二抓取件从第一位置转移到第二位置的第二轨道以及供所述第二抓取件横向活动的第三轨道,当所述第二抓取件移动至所述第三轨道的设定位置时,物料被安置于平口机上。
上述方案中,优选的,所述第一平台包括第一主动辊、第一从动辊以及绕设于所述第一主动辊、所述第一从动辊上的第一传送带,所述第一主动辊与配置于所述支架体上的第一电机传动连接;
所述第二平台包括第二主动辊、第二从动辊以及绕设于所述第二主动辊、所述第二从动辊上的第二传送带,所述第二主动辊与配置于所述支架体上的第二电机传动连接。
上述方案中,优选的,所述第一平台和/或所述第二平台上配置有用以限定物料移动通道宽度的限位件;
所述限位件包括第一限位条及第二限位条,所述第一限位条及所述第二限位条分别通过若干固定块定位于所述支架体上。
上述方案中,优选的,所述第一定位件包括至少两个夹持单元以及分别驱动相应的所述夹持单元横向移动的气缸,所述气缸固定于所述支架体上;
所述夹持单元包括夹持板及配置于所述夹持板上的分料件,所述分料件包括有若干凸齿;
所述第二定位件固定于所述支架体上,包括有与物料相适配的凹口。
上述方案中,优选的,所述夹持板上开设有用于容置所述分料件的槽口以及若干与所述槽口连通的安装孔;
所述分料件上包括有与所述安装孔相对应的穿孔;
所述安装孔处配置有销轴,所述销轴穿过所述穿孔以限位所述分料件并使所述分料件与所述销轴形成转动配合。
上述方案中,优选的,所述分料件上包括有槽体,所述夹持板上固定有固定件,所述固定件上包括有与所述槽体相对应的贯穿孔,所述贯穿孔处配置有调节销,所述调节销一端装配于所述槽体内;
所述槽体的孔径大于所述贯穿孔的孔径。
上述方案中,优选的,所述第一抓取件为吸盘,所述第一驱动单元包括安装于支架体上用于控制所述第一抓取件横向移动的第一气缸、与所述第一气缸相连并滑动于滑轨上的滑块以及安装于所述滑块上用于控制所述第一抓取件纵向移动的第二气缸,所述第一抓取件安装于所述第二气缸输出端处,所述滑轨固定于所述支架体上。
上述方案中,优选的,所述第二抓取件包括与所述第二驱动单元传动连接的第一臂、配置于所述轨道上的定位销、转动配置于所述架体上的第二臂以及安装于所述第二臂上的吸盘;
所述第一臂上包括有活动槽;
所述定位销包括配置于所述轨道上并与所述活动槽相配合的第一部位以及与所述第二臂相连的第二部位。
上述方案中,优选的,所述第二臂包括转动配置于所述架体上的第一支臂、滑动配置于所述第一支臂上的第一滑轨以及配置于所述第一滑轨上的第二支臂,所述吸盘安装于所述第二支臂上,所述定位销的第二部位安装于所述第一滑轨上。
上述方案中,优选的,所述架体固定于所述支架体上;
所述第二驱动单元为固定于所述架体上的电机;
所述第一滑轨上包括有与所述定位销的第二部位相配合的孔;
所述第一滑轨上固定有连接件,所述第二支臂固定于所述连接件上;
所述第一轨道为纵向开设的直线轨道,所述第二轨道为连接第一轨道与第三轨道的弧形轨道,所述第三轨道为横向开设的直线轨道。
本发明的有益效果是:
本发明提出平口机的自动上料机构,能够定位堆叠物料,可从堆叠物料中抓取单一物料逐个输送,可将横向输送的物料自动转移安置到平口机作业的相应部位上,可实现全程自动化作业,结构简单,操作方便。
附图说明
图1为本发明示意图。
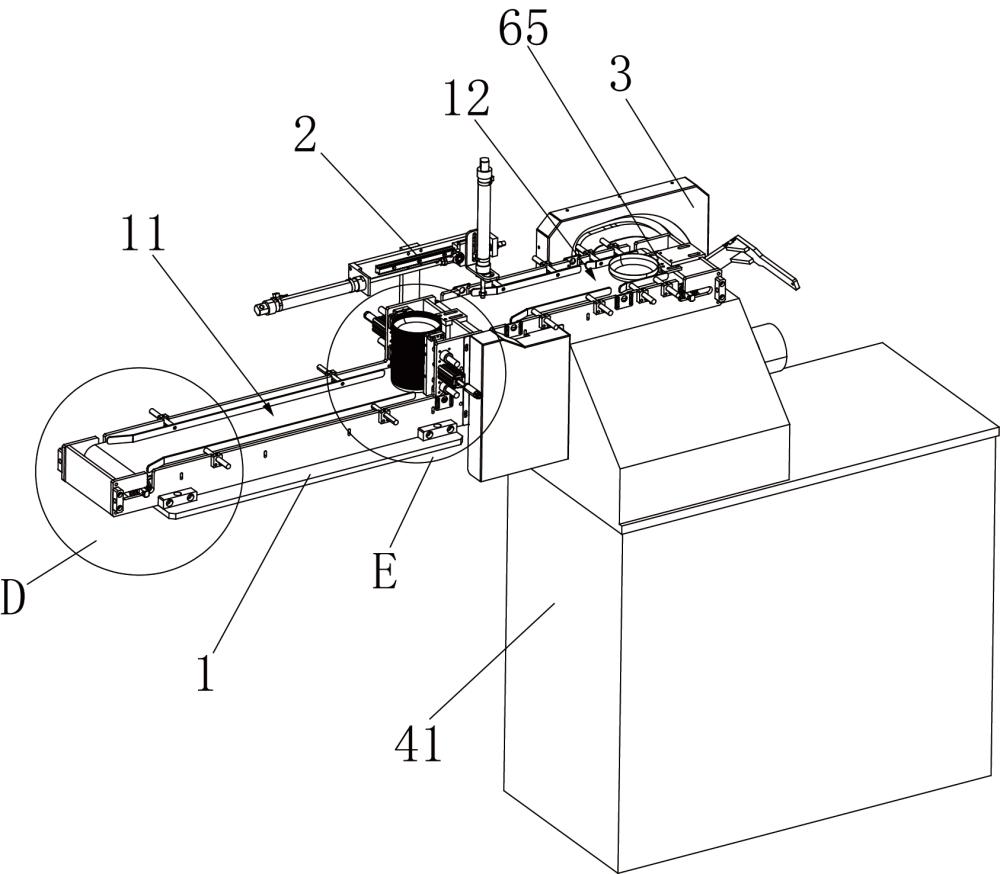
图2为本发明另一视角示意图。
图3为图1中D处的放大示意图。
图4为图1中E处的放大示意图。
图5为本发明夹持板与分料件的配合示意图。
图6为本发明分料件示意图。
图7为本发明固定件示意图。
图8为本发明第一抓取单元示意图。
图9为本发明第二定位件示意图。
图10为本发明第二抓取单元示意图。
图11为本发明第二抓取单元去掉外罩后的示意图。
图12为本发明第二抓取单元背面示意图。
图13为本发明第一臂、定位销及第二臂的配合示意图。
图14为本发明第一臂、定位销及第二臂的分解状态示意图。
图15为需要平口机作业的物料的示意图。
图16为平口机示意图。
具体实施方式
下面结合附图与具体实施方式对本发明作进一步详细描述:
参见图1-图16,一种平口机进料机构,包括支架体1、定位单元、第一抓取单元2及第二抓取单元3。
支架体1作为支撑、部件安装用具其可独立的立于地面上,亦或直接安装于平口机机壳41上,如图1、图2所示为支架体1固定安装于平口机机壳41上的样式示意。
支架体1上具有第一平台11及第二平台12,其中,第一平台11用于将堆叠物料运送到指定位置,并支撑堆叠物料,到达指定位置后由定位单元的第一定位件将其定位;第二平台12用于将单一物料运送到指定位置,并支撑单一物料,到达指定位置后由定位单元的第二定位件65将其定位。
本实施例中,第一平台11包括第一主动辊、第一从动辊以及绕设于第一主动辊、第一从动辊上的第一传送带,第一主动辊与配置于支架体1上的第一电机传动连接;第二平台12包括第二主动辊、第二从动辊以及绕设于第二主动辊、第二从动辊上的第二传送带,第二主动辊与配置于支架体上的第二电机传动连接,通过主动辊、从动辊、传送带及电机的配合传送结构具体可参考现有设计,不作过多赘述。
依靠相应的传送带带动物料移动至指定位置。
为使堆叠物料或单一物料前进的更为稳定,本实施例中,第一平台11和/或第二平台12上配置有用以限定物料移动通道宽度的限位件,如图1-3所示,限位件包括第一限位条51及第二限位条52,第一限位条51及第二限位条52分别通过若干固定块53定位于支架体1上。
第一定位件及第二定位件均安装于支架体1上,其中,第一定位件位于第一平台11上方,第二定位件位于第二平台12上方。
为更为适配平口机,本实施例中,将第一平台11与第二平台12设定为相互间具备一定高度差,如图1、图2所示,第一平台11位于平口机一侧,其处于较低位置;第二平台12位于平口机上方,其处于较高位置,当然,根据实际需要亦可选用其他的位置布局方式。
本实施例中,第一定位件包括至少两个夹持单元以及分别驱动相应的所述夹持单元横向移动的气缸61,如图4所示,气缸61固定于支架体1上,夹持单元包括夹持板62及配置于夹持板62上的分料件63,分料件63包括有若干凸齿631,依靠凸齿631对物料边缘形成一定的阻力,以使抓取件抓取物料时能够实现相邻间物料自动的相互分离,避免多个物料被同时抓取导致位于下方物料的掉落损伤。
作为其中一种实施方式,分料件63倾斜状设置于夹持板62上能够提升分料效果,为实现分料件63的角度调节,本实施例中,夹持板62上开设有用于容置分料件63的槽口621以及若干与槽口621连通的安装孔622,槽口621可由夹持板62上方往下以纵向开设的形式形成,安装孔622则由夹持板62侧壁以横向开设的形式形成,如图5所示。
分料件63上包括有与安装孔622相对应的穿孔632,如图6所示,在安装孔622处配置一销轴,销轴对应的穿过穿孔632,以使分料件63可沿着销轴转动动作,同时,销轴又可对分料件63形成限位作用,避免分料件63整体的位置偏移。
为便于分料件63角度的调节,分料件63上包括有槽体633,夹持板62上固定有固定件64,如图5、图7所示,固定件64上包括有与槽体633相对应的贯穿孔641,贯穿孔641处配置有调节销,调节销一端装配于槽体633内,通过调节销的推动可实现分料件63角度的调节,作为其中一种选择,槽体633的孔径大于贯穿孔641的孔径,以在分料件角度调节后为调节销提供活动所需空间;分料件63与槽口621之间可具备一定的摩擦阻力,或两者之间具有过盈配合关系,以在分料件63角度调节后有效的定位。
对于第二定位件65,其用于单一物料的定位,结构可相应的简化,如图1、图2及图9所示,第二定位件65固定于支架体1上,包括有与物料相适配的凹口651,凹口651处可安装缓冲件652,如橡胶垫片。
对于如何将第一平台11上的物料抓取至第二平台12上,本实施例中,由第一抓取单元2加以实现,第一抓取单元2包括第一抓取件21以及驱动第一抓取件21纵向和/或横向移动的第一驱动单元。
具体的,第一抓取件21为吸盘,第一驱动单元包括安装于支架体1上用于控制第一抓取件21横向移动的第一气缸22、与第一气缸22相连并滑动于滑轨23上的滑块24以及安装于滑块24上用于控制第一抓取件21纵向移动的第二气缸25,第一抓取件21安装于第二气缸25输出端处,滑轨23固定于支架体1上,如图1、图2及图8所示,通过第二气缸25的动作实现第一抓取件21的纵向动作,通过第一气缸22的动作实现第二气缸25与第一抓取件21的同步横向动作,以此实现物料从第一平台11转移至具有高度差的第二平台12上。
当单一物料停止在第二定位件65处时,第二抓取单元3启动,将其转移至平口机的相应位置处。
物料在第二平台12上时,其位置状态如图1所示,该状态为水平放置状态,而平口机上需要物料以水平放置状态为基准旋转90度或接近于90度的直立状态装入,装入于平口机的安置部位92处,安置部位92具有用于容置物料的腔体,以使物料边处于外端,而后通过加工头车平料边的毛料,该处动作由第二抓取单元3加以实现。
具体的,第二抓取单元3包括具有轨道的架体31、活动于轨道上的第二抓取件32以及用以驱动第二抓取件32活动的第二驱动单元33,架体31可固定安装于支架体1上或直接固定安装于平口机机壳41上。
如图10、图11所示,轨道包括供第二抓取件32纵向活动的第一轨道34、供所第二抓取件32从第一位置转移到第二位置的第二轨道35以及供第二抓取件32横向活动的第三轨道36。
第一轨道34用于第二抓取件32下探抓取物料,其为纵向开设的直线轨道;第二轨道35为连接第一轨道34与第三轨道36的弧形轨道;第三轨道36为横向开设的直线轨道,用于物料以横向的方式装入平口机安置部位处,如不具备该处轨道,仅以弧形轨道的方式难以直接将其装入或装入时会卡死。
对于第二抓取件32,其具有与异形的轨道相适应的部件,以使其能够在无其他推力的情况下完成相应的动作。
如图11-图14所示,本实施例中,第二抓取件32包括与第二驱动单元33传动连接的第一臂321、配置于轨道上的定位销322、转动配置于架体31上的第二臂以及安装于第二臂上的吸盘。
第二驱动单元33可为电机,其可固定安装于架体31的背面,其输出轴穿过架体31连接位于架体31正面的第一臂321,第一臂321上包括有活动槽3211,活动槽3211为贯穿孔。
定位销322包括配置于轨道上并与活动槽3211相配合的第一部位3221以及与第二臂相连的第二部位3222,如图11及图13所示,定位销322的第一部位3221不仅位于轨道处,与轨道形成配合关系,其还与活动槽3211形成配合关系,穿设于活动槽3211处,在第一臂321被第二驱动单元33带动转动过程中,定位销322在活动槽3211的范围内相应活动。
本实施例中,第二臂包括转动配置于架体31上的第一支臂37、滑动配置于第一支臂37上的第一滑轨38以及配置于第一滑轨38上的第二支臂39,其中,第一滑轨38上包括有孔381,该孔381与定位销322的第二部位3222相配合,定位销322的第二部位3222插入于该孔381处,由此,在第一臂321带动定位销322动作的过程中,能够带动第一滑轨38以及第二支臂39相应的动作,具体表现于第一轨道34与第三轨道36处,在直线轨道上,定位销322直线运动,结合滑动设置于第一支臂37上的第一滑轨38,其可随之直线动作,从而在第一轨道34上实现下探抓取物料,在第三轨道36上实现横向的将物料装入至具有腔体的平口机安置部位92内,而无需辅助工具。
与第一抓取件21相同的,第二支臂39上安装有吸盘。
作为其中一种选择,第一滑轨38上固定有连接件310,第二支臂39固定于连接件310上,如图11、图13及图14所示。
本实施例中,各动作部件的动作到位处均可相应的设置传感器,由传感器将信号传送到控制单元,由控制单元统筹控制,对于传感器、控制单元的电气方式可参考现有设计。
以上实施例仅用以说明本发明的技术方案,而非对其限制;尽管参照前述实施例对本发明进行了详细的说明,本领域的普通技术人员应当理解:其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分技术特征进行等同替换;而这些修改或者替换,并不使相应技术方案的本质脱离本发明各实施例技术方案的精神和范围。
- 一种沼气进料口的自动关闭机构
- 一种去石机用进料口处理装置
- 一种自动罗纹机的进料机构
- 一种带有进料机构的打扣机
- 一种注塑机用具有预加热胶料进料的料筒移动机构
- 一种玛钢管件平口机的平口机构
- 平转浸出器进料口机构