一种车钩全自动联挂解钩控制方法及装置
文献发布时间:2023-06-19 13:46:35
技术领域
本发明涉及地铁车辆控制电路领域,具体地说是 一种车钩全自动联挂解钩控制方法及装置。
背景技术
地铁车辆中主要有三种类型车钩:全自动车钩、半自动车钩以及半永久牵引杆。其中全自动车钩主要安装于地铁车辆头车一端,用于调车作业或紧急救援时实现两辆列车间电路及气路的自动联挂。全自动车钩联挂作业时通过机械车钩连接两列车气路从而实现制动施加和缓解,通过电气钩连接两列车电路从而实现广播对讲、制动控制等基本功能。
目前全自动车钩控制方案主要有两种:一种是纯气路控制,一种是电路控制。气路控制是由机械行程开关触点控制气路导通从而控制电气车钩联挂解钩,电路控制则主要通过车辆外围电路实现车钩操作。
在地铁车辆发生故障无法行车时,需要将正常车辆与故障车辆联挂进行救援,目前各主机厂对于全自动车钩联挂解钩的主要控制方式为在机械车钩联挂气路导通后自动联挂电气车钩,解钩时按下解钩控制器在电气车钩分离后机械车钩自动解钩。
常规车钩控制方案中,虽能实现全自动车钩的自动联挂及解钩功能,但控制策略较为单一,无法对电气车钩、机械车钩分别进行控制,因而不适用于一些特殊故障工况。譬如,故障车辆由于线缆破皮短路、设备短路故障等原因导致的车辆无法动车,此时若采用常规方法,一旦正常车辆与被救援车辆的全自动车钩直接自动联挂,在电气车钩联挂完成电触点导通后短路故障将立即传递到正常车辆,导致短路范围扩大,并影响正常车辆设备安全及正常行驶。因而发生短路故障后,救援车辆需仅连接气路而不连接电路(即只联挂机械车钩,不联挂电气车钩),此时只能手动将车下电气车钩电磁阀进行隔离,阻止电气车钩伸出,然后再进行车钩联挂。因此,常规方法的救援效率大大降低。
发明内容
本发明要解决的技术问题是针对上述现有技术的不足,而提供一种车钩全自动联挂解钩控制方法及装置,本发明在常规联挂救援功能基础上,增加了电气车钩及机械车钩的单独控制功能,避免了救援时故障的进一步扩大,且实现了司机室本地一键控制,无需手动操作,有效提高了救援效率。
为解决上述技术问题,本发明采用的技术方案是:
一种车钩全自动联挂解钩控制方法,包括机械车钩动作装置、电气车钩动作装置和联挂解钩控制装置;所述机械车钩动作装置包括机械车钩推送气缸、解钩气缸、机械车钩动作电磁阀;所述电气车钩动作装置包括电气车钩推送气缸、电气车钩动作电磁阀;所述联挂解钩控制装置包括解钩控制器、选择开关、联挂继电器和解钩继电器。
所述的车钩全自动联挂解钩控制方法具体包括以下步骤:
S1、机械车钩和电气车钩的自动连挂:事故车和救援车的全自动车钩在机械碰撞后,自动实现机械车钩联挂;机械车钩连挂到位后,两车电气车钩通电且通风,操作选择开关至电气车钩伸出档位,电气车钩动作电磁阀的伸出控制端得电并换向,电气车钩推送气缸动作,两车电气车钩伸出完成连挂,从而实现功能:车辆联挂时,机械车钩、电气车钩均联挂;
S2、机械车钩连挂,电气车钩解钩:事故车和救援车的全自动车钩在机械碰撞后,自动实现机械车钩联挂;机械车钩连挂到位后,两车电气车钩通电且通风,操作选择开关S至空挡,电气车钩动作电磁阀的伸出控制端失电,电气车钩推送气缸不动作,两车电气车钩皆保持缩回状态,实现功能:车辆联挂时,仅机械车钩联挂,电气车钩不联挂;
S3、机械车钩和电气车钩的自动解钩:事故车和救援车完全联挂后开始解钩操作,按下救援车解钩控制器,两车解钩继电器得电,其常开触点闭合,电气车钩动作电磁阀缩回控制端得电并换向,电气车钩推送气缸动作,两车电气车钩分离并缩回;电气车钩缩回后,联挂继电器断电,其常闭触点将闭合,机械车钩动作电磁阀得电,解钩气缸动作,机械车钩完成解钩,从而实现功能:车辆解钩时,机械车钩、电气车钩均解钩;
S4、电气车钩解钩,机械车钩连挂:事故车和救援车完全联挂后开始解钩操作,操作事故车选择开关至电气车钩缩回档位,事故车电气车钩动作电磁阀的缩回控制端得电并换向,电气车钩推送气缸缩回;同时救援车解钩继电器得电,其常开触点将闭合,电气车钩动作电磁阀的缩回控制端得电并换向,救援车电气车钩推送气缸缩回,两车电气车钩分离,而此时两车机械车钩动作电磁阀失电,使两车的机械车钩仍保持联挂状态,从而实现功能:车辆解钩时,仅电气车钩解钩,机械车钩保持联挂。
基于一种车钩全自动联挂解钩控制方法的控制装置,其特征在于:所述机械车钩动作装置还包括机械车钩压缩空气管路、机械车钩手动截止阀;所述机械车钩压缩空气管路一端连接压缩空气主风管,另一端顺次连接机械车钩手动截止阀、机械车钩动作电磁阀、解钩气缸和机械车钩推送气缸;所述机械车钩动作装置还包括安装在压缩空气主风管与机械车钩手动截止阀之间空气过滤器。
基于一种车钩全自动联挂解钩控制方法的控制装置,其特征在于:所述电气车钩动作装置还包括电气车钩压缩空气管路、电气车钩手动截止阀;所述电气车钩压缩空气管路一端连接压缩空气主风管,另一端顺次连接电气车钩手动截止阀、电气车钩动作电磁阀和电气车钩推送气缸;所述电气车钩动作装置还包括安装在压缩空气主风管与电气车钩手动截止阀之间的空气过滤器。
作为本发明地进一步优选,所述机械车钩动作装置还包括有第一行程开关和第二行程开关;所述第一行程开关和第二行程开关串联布设在选择开关与机械车钩推送气缸之间;第一行程开关和第二行程开关串联联通后,方可确认机械车钩连挂完成。
作为本发明地进一步优选,所述解钩控制器和机械车钩推送气缸之间的线路上布设有二极管;电气车钩动作电磁阀和解钩继电器之间线路上布设有二极管。
作为本发明地进一步优选,所述电气车钩动作电磁阀采用双电控两位五通阀。
本发明具有如下有益效果:
1.本发明在实现常规联挂救援功能基础上,优化设计了电路,增加了电气车钩及机械车钩的单独控制功能,实现了全自动车钩电路控制功能细化升级,可实现:车辆联挂时,机械车钩、电气车钩均联挂;车辆联挂时,仅机械车钩联挂,电气车钩不联挂;车辆解钩时,机械车钩、电气车钩均解钩;车辆解钩时,仅电气车钩解钩,机械车钩保持联挂等四组细分功能,为极端救援场景下短路故障扩大升级的问题提供了有效的解决方案。
2.本发明实现了远程控制室远程一键控制,无需手动操作,有效减少人力干预,提高了救援效率。
附图说明
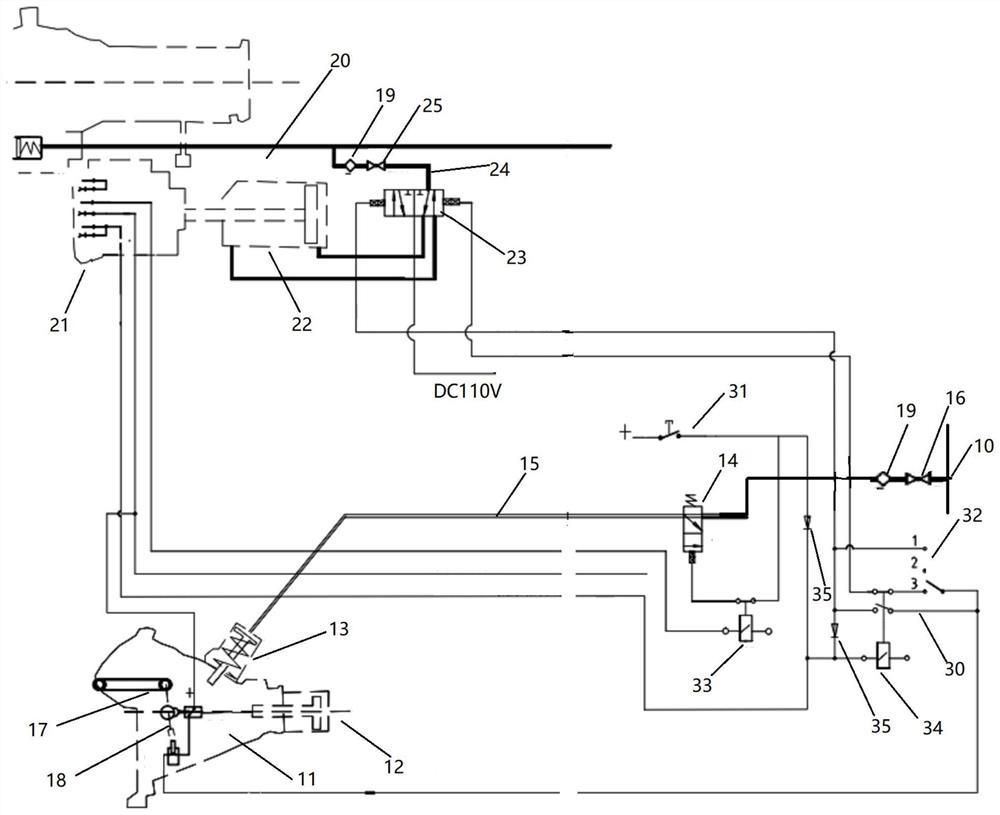
图1是本发明一种车钩全自动联挂解钩控制的原理图。
其中有:
10.机械车钩动作装置;11.机械车钩;12.机械车钩推送气缸;13.解钩气缸;14.机械车钩动作电磁阀;15.机械车钩压缩空气管路;16.机械车钩手动截止阀;17.第一行程开关;18.第二行程开关;19.空气过滤器;
20.电气车钩动作装置;21.电气车钩;22.电气车钩推送气缸;23.电气车钩动作电磁阀;24.电气车钩压缩空气管路;25.电气车钩手动截止阀;
30.联挂解钩控制装置;31.解钩控制器;32.选择开关;33.联挂继电器;34.解钩继电器;35.二极管。
具体实施方式
下面结合附图和具体较佳实施方式对本发明作进一步详细的说明。
本发明的描述中,需要理解的是,术语“左侧”、“右侧”、“上部”、“下部”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,“第一”、“第二”等并不表示零部件的重要程度,因此不能理解为对本发明的限制。本实施例中采用的具体尺寸只是为了举例说明技术方案,并不限制本发明的保护范围。
如图1所示,一种车钩全自动联挂解钩控制方法,其特征在于:包括机械车钩动作装置10、电气车钩动作装置20和联挂解钩控制装置30;所述机械车钩动作装置10包括机械车钩11、机械车钩推送气缸12、解钩气缸13、机械车钩动作电磁阀14;所述电气车钩动作装置20包括电气车钩21、电气车钩推送气缸22、电气车钩动作电磁阀23;所述联挂解钩控制装置30包括解钩控制器31、选择开关32、联挂继电器33和解钩继电器34。
所述电气车钩动作电磁阀23采用双电控两位五通阀。
所述机械车钩动作装置10还包括机械车钩压缩空气管路15、机械车钩手动截止阀16;所述机械车钩压缩空气管路15一端连接压缩空气主风管,另一端顺次连接机械车钩手动截止阀16、机械车钩动作电磁阀14、解钩气缸13和机械车钩推送气缸12;所述机械车钩动作装置10还包括安装在压缩空气主风管与机械车钩手动截止阀16之间空气过滤器19。
所述电气车钩动作装置20还包括电气车钩压缩空气管路24、电气车钩手动截止阀25;所述电气车钩压缩空气管路24一端连接压缩空气主风管,另一端顺次连接电气车钩手动截止阀25、电气车钩动作电磁阀23和电气车钩推送气缸22;所述电气车钩动作装置20还包括安装在压缩空气主风管与电气车钩手动截止阀25之间的空气过滤器19。
所述机械车钩动作装置10还包括有第一行程开关17和第二行程开关18;所述第一行程开关17和第二行程开关18串联布设在选择开关32与机械车钩推送气缸22之间;第一行程开关17和第二行程开关18串联联通后,方可确认机械车钩11连挂完成。
所述解钩控制器31和机械车钩推送气缸22之间的线路上布设有二极管35;电气车钩动作电磁阀23和解钩继电器34之间线路上布设有二极管35。
所述的车钩全自动联挂解钩控制方法具体包括以下步骤:
S1、机械车钩11和电气车钩21的自动连挂:事故车和救援车的全自动车钩在发生机械碰撞接触后,自动实现机械车钩11联挂;机械车钩11连挂到位后,两车电气车钩21通电且通风,操作选择开关32至电气车钩伸出档位,电气车钩动作电磁阀23的伸出控制端得电并换向,电气车钩推送气缸22动作,两车电气车钩21伸出完成连挂,从而实现功能:车辆联挂时,机械车钩11、电气车钩21均联挂;
S2、机械车钩11连挂,电气车钩21解钩:事故车和救援车的全自动车钩在发生机械碰撞接触后,自动实现机械车钩11联挂;机械车钩11连挂到位后,两车电气车钩21通电且通风,操作选择开关32至空挡,电气车钩动作电磁阀23的伸出控制端失电,电气车钩推送气缸22不动作,两车电气车钩21皆保持缩回状态,实现功能:车辆联挂时,仅机械车钩11联挂,电气车钩21不联挂;
S3、机械车钩11和电气车钩21的自动解钩:事故车和救援车完全联挂后开始解钩操作,按下救援车解钩控制器31,两车解钩继电器34得电,其常开触点闭合,电气车钩动作电磁阀23缩回控制端得电并换向,电气车钩推送气缸22动作,两车电气车钩21分离并缩回;电气车钩21缩回后,联挂继电器33断电,其常闭触点将闭合,机械车钩动作电磁14阀得电,解钩气缸13动作,机械车钩11完成解钩,从而实现功能:车辆解钩时,机械车钩11、电气车钩21均解钩;
S4、电气车钩12解钩,机械车钩11连挂:事故车和救援车完全联挂后开始解钩操作,操作事故车选择开关32至电气车钩缩回档位,事故车电气车钩动作电磁阀23的缩回控制端得电并换向,电气车钩推送气缸22缩回;同时救援车解钩继电器34得电,其常开触点将闭合,电气车钩动作电磁阀23的缩回控制端得电并换向,救援车电气车钩推送气缸22缩回,两车电气车钩21分离,而此时两车机械车钩动作电磁阀14失电,使两车的机械车钩11仍保持联挂状态,从而实现功能:车辆解钩时,仅电气车钩21解钩,机械车钩11保持联挂。
本发明采用了一种全新全自动车钩控制电路,在车辆设置模式选择开关,通过车辆控制电路自动实现以下4个功能:
车辆联挂时,机械车钩、电气车钩均联挂;
车辆联挂时,仅机械车钩联挂,电气车钩不联挂;
车辆解钩时,机械车钩钩、电气车钩均解钩;
车辆解钩时,仅电气车钩解钩,机械车钩保持联挂。
该方法在常规联挂救援控制技术基础上,优化设计了新的电路,增加了电钩及机械钩的单独控制功能,实现了全自动车钩电路控制功能细化升级,为极端救援场景下短路故障扩大升级的问题提供了有效的解决方案;且该控制电路实现了司机室本地一键控制,无需下车手动隔离,方便灵活,有效提高了救援效率。
以上详细描述了本发明的优选实施方式,但是,本发明并不限于上述实施方式中的具体细节,在本发明的技术构思范围内,可以对本发明的技术方案进行多种等同变换,这些等同变换均属于本发明的保护范围。