一种适用于复杂曲面的船舶清洗磁力爬壁机器人
文献发布时间:2023-06-19 13:46:35
技术领域
本发明涉及船舶清洗磁力爬壁机器人领域,尤其涉及一种适用于复杂曲面的船舶清洗磁力爬壁机器人。
背景技术
在船舶清洗作业中,由于人员和常规设备难以到达船舶的侧面等位置,因此多采用磁力爬壁装备,即能够沿着船舶的侧面攀爬行走的磁力爬壁机器人。现有的吸盘式船舶清洗磁力爬壁机器人包括一个车体框架,车体框架上安装有电控盒、抽吸式清洗盘、从动轮模块和两个主动轮模块,抽吸式清洗盘位于车体框架的底部,两个主动轮模块分别位于抽吸式清洗盘的两侧,主动轮模块和从动轮模块上都设有磁铁,通过磁铁产生的磁吸附力使机器人能够吸附在船舶的侧面进行运动,抽吸式清洗盘对机器人运动的位置进行真空抽吸清洗。但现有的船舶清洗磁力爬壁机器人存在多种不足,导致磁力爬壁机器人对船舶侧壁复杂曲面的适应性不足。
第一,现有的车体框架的结构为一根中央连接轴穿设在两块安装板上,电控盒、从动轮模块和抽吸式清洗盘均与两块安装板同时连接,两个主动轮模块分别与中央连接轴的两端连接,而整体安装后的理想状态为两个主动轮模块的主动轮和抽吸式清洗盘的底面位于同一平面,因此需要控制中央连接轴和两块安装板的相对位置,但现有技术中通过管道抱卡对中央连接轴和安装板进行固定,管道抱卡在拆卸维护后复位困难,并且定位效果较差,使主动轮和抽吸式清洗盘的底面存在位置误差,尤其在机器人位于复杂曲面时会影响机器人运动的稳定性和准确性。
第二,现有的主动轮模块是通过一根侧连接轴与中央连接轴进行对接,两根连接轴的对接部位通过一个销子进行定位,而销子与两根连接轴之间非常容易产生间隙,导致两个主动轮模块相对于车体框架产生晃动,尤其在船舶侧壁复杂曲面上,机器人的运动姿态会由于曲面变化而持续发生变化,进一步放大主动轮模块相对于车体框架的晃动,使机器人在船舶侧壁复杂曲面上发生振动和晃动,难以平稳运动,因此需要增加支撑部件,使得机器人结构形成抗变形能力较强的框架结构。
第三,现有的从动轮模块上安装有两个万向轮,万向轮在改变前进/后退的状态时会产生支点的转变,容易使抽吸式清洗盘两侧的主动轮模块发生翘起,使机器人磁吸附力突然减少,尤其在船舶侧壁复杂曲面上机器人的运动姿态必然会是持续变化的,非常容易在万向轮转变支点时发生主动轮模块翘起、磁吸附力不稳定的情况,不稳定的磁吸附力会导致抽吸式清洗盘难以与复杂曲面保证良好的密封状态,影响抽吸效果,严重时还可能会使机器人从船舶侧壁复杂曲面上掉落。
发明内容
为解决上述现有的船舶清洗磁力爬壁机器人难以适应复杂曲面的问题,本发明提供了一种适用于复杂曲面的船舶清洗磁力爬壁机器人。
本发明为解决上述技术问题所采用的技术方案是:一种适用于复杂曲面的船舶清洗磁力爬壁机器人,包括一个车体框架,车体框架上安装有电控盒、抽吸式清洗盘、从动轮模块和两个主动轮模块,抽吸式清洗盘位于车体框架的底部,两个主动轮模块分别位于抽吸式清洗盘的两侧,所述车体框架包括一根中央连接轴和两块安装板,电控盒、从动轮模块和抽吸式清洗盘均与两块安装板同时连接,中央连接轴穿设在两块安装板上,中央连接轴的两端分别设有第一端法兰,中央连接轴中部设有两个内法兰,两块安装板分别与各自的一个内法兰相互贴合连接,内法兰和安装板上开设有多个相互对齐的通孔,通孔内穿设有连接螺栓;
所述主动轮模块包括一个壳体,壳体上安装有主动轮、用于带动主动轮转动的动力传动组件、以及用于和主动轮所行驶的工作面之间产生磁吸附力的主动轮磁铁,壳体上设有一根侧连接轴,侧连接轴朝向车体框架的一端设有第二端法兰,第一端法兰和第二端法兰的其中一个的端面上设有矩形体凸块,另一个的端面上开设有与矩形体凸块相匹配的矩形体凹槽,第一端法兰和第二端法兰的端面相互贴合连接,且矩形体凸块插入矩形体凹槽内,第一端法兰和第二端法兰上开设有多个相互对齐的通孔,通孔内穿设有连接螺栓;
所述从动轮模块包括一块顶板,顶板的顶侧与两块安装板同时连接,顶板的底侧连接有两个全向轮,两个全向轮之间设有用于和全向轮所行驶的工作面之间产生磁吸附力的从动轮磁铁。
优选的,所述安装板为三角形平板,两块安装板相互平行。
优选的,第一端法兰上开设的多个通孔和内法兰上开设的多个通孔分别沿中央连接轴的周向均匀间隔分布。
优选的,两块安装板相对一侧的表面分别与两个内法兰相背一侧的表面贴合。
优选的,中央连接轴和两根侧连接轴的轴线重合,矩形体凸块沿长度方向的中心线与中央连接轴的轴线重合。
根据上述技术方案,本发明的有益效果是:
1、本发明在中央连接轴中部设有两个内法兰,两块安装板分别与各自的一个内法兰贴合,再通过连接螺栓固定,能够有效保证安装板和中央连接轴之间的连接强度和相对位置关系,与现有技术采用管道抱卡相比,不仅提升了定位效果,而且安装板与内法兰可以反复拆装并且精确复位,当机器人位于复杂曲面时也能使两个主动轮模块的主动轮和抽吸式清洗盘的底面始终位于同一平面,消除主动轮和抽吸式清洗盘的底面之间的位置误差,通过增加支撑部件,使得机器人的中央连接轴部位形成抗变形能力较强的框架结构,保证机器人在船舶侧壁复杂曲面上运动的稳定性和准确性。
2、本发明在中央连接轴的两端分别设有第一端法兰,在侧连接轴上设有第二端法兰,两个端法兰贴合连接并通过连接螺栓固定,并且两个端法兰之间还设有相互配合的矩形体凸块和矩形体凹槽,使中央连接轴和侧连接轴能够精确、稳定连接,与现有技术通过一个销子对两根连接轴进行定位相比,能够有效消除两根连接轴之间的间隙,通过增加支撑部件,使得机器人的主动轮模块连接部位形成抗变形能力较强的框架结构,当机器人位于复杂曲面时也能避免主动轮模块相对于车体框架晃动,保证机器人在船舶侧壁复杂曲面上能够平稳运动,不会因为自身结构而发生振动和晃动。
3、本发明的从动轮模块上安装有两个全向轮,替代了现有技术采用的万向轮,全向轮在改变前进/后退的状态时不会改变支点,运动更加平稳,当机器人位于复杂曲面时也能够避免主动轮模块翘起,保持机器人具有稳定的磁吸附力,在机器人持续发生运动姿态变化时也能保证抽吸式清洗盘与复杂曲面的良好密封状态,保证抽吸效果,防止机器人从船舶侧壁复杂曲面上掉落。
附图说明
图1为船舶清洗磁力爬壁机器人的示意图;
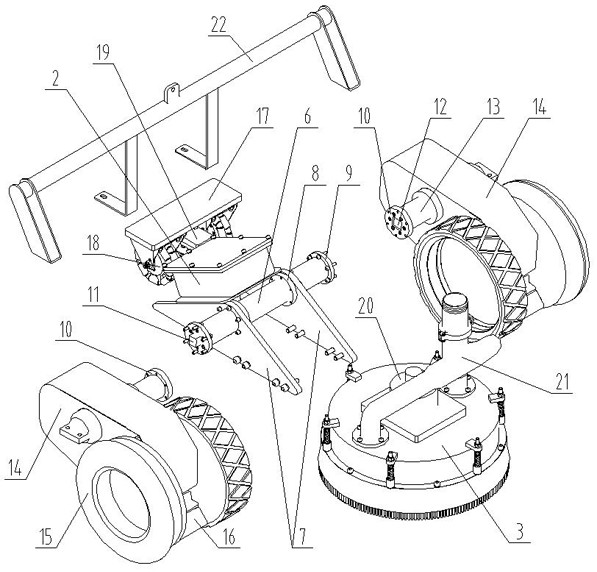
图2为图1的爆炸示意图;
图3为图2的局部示意图。
图中标记:1、车体框架,2、电控盒,3、抽吸式清洗盘,4、从动轮模块,5、主动轮模块,6、中央连接轴,7、安装板,8、内法兰,9、第一端法兰,10、第二端法兰,11、矩形体凸块,12、矩形体凹槽,13、侧连接轴,14、壳体,15、主动轮,16、主动轮磁铁,17、顶板,18、全向轮,19、从动轮磁铁,20、高压喷水枪,21、抽水管,22、保护架。
具体实施方式
参见附图,具体实施方式如下:
一种适用于复杂曲面的船舶清洗磁力爬壁机器人,包括一个车体框架1,车体框架1上安装有电控盒2、抽吸式清洗盘3、从动轮模块4和两个主动轮模块5,抽吸式清洗盘3位于车体框架1的底部,抽吸式清洗盘3内安装有高压喷水枪20,高压喷水枪20的进水口从抽吸式清洗盘3的顶部伸出,吸式清洗盘的顶部还开设有两个出水口,两个出水口均与抽水管21连接,工作时高压喷水枪20向船舶侧壁持续喷水进行清洗,同时抽水管21持续抽水,使抽吸式清洗盘321内部形成真空负压,污物就会随着水流持续被抽水管抽走。两个主动轮模块5分别位于抽吸式清洗盘3的两侧,两个主动轮模块5之间通常还连接有一根保护架22,而且保护架22的中部还与从动轮模块4的顶端连接,形成框架结构。
车体框架1包括一根中央连接轴6和两块安装板7,安装板7为三角形平板,两块安装板7相互平行,电控盒2、从动轮模块4和抽吸式清洗盘3均与两块安装板7同时连接,中央连接轴6穿设在两块安装板7上,中央连接轴6的两端分别设有第一端法兰9,中央连接轴6中部设有两个内法兰8,两块安装板7分别与各自的一个内法兰8相互贴合连接,内法兰8和安装板7上开设有多个相互对齐的通孔,通孔内穿设有连接螺栓。通过增加支撑部件,使得机器人的中央连接轴6部位形成抗变形能力较强的框架结构,能够有效保证安装板7和中央连接轴6之间的连接强度和相对位置关系,而且安装板7与内法兰8可以反复拆装并且精确复位。
主动轮模块5包括一个壳体14,壳体14上安装有主动轮15、用于带动主动轮15转动的动力传动组件、以及用于和主动轮15所行驶的工作面之间产生磁吸附力的主动轮磁铁16,壳体14上设有一根侧连接轴13,侧连接轴13朝向车体框架1的一端设有第二端法兰10,第一端法兰9和第二端法兰10的其中一个的端面上设有矩形体凸块11,另一个的端面上开设有与矩形体凸块11相匹配的矩形体凹槽12,第一端法兰9和第二端法兰10的端面相互贴合连接,且矩形体凸块11插入矩形体凹槽12内,中央连接轴6和两根侧连接轴13的轴线重合,矩形体凸块11沿长度方向的中心线与中央连接轴6的轴线重合,第一端法兰9和第二端法兰10上开设有多个相互对齐的通孔,通孔内穿设有连接螺栓。通过增加支撑部件,使得机器人的主动轮模块5连接部位形成抗变形能力较强的框架结构,使中央连接轴6和侧连接轴13能够精确、稳定连接,有效消除中央连接轴6和侧连接轴13之间的间隙,避免主动轮模块5相对于车体框架1产生晃动,保证机器人在船舶的曲面侧壁上能够平稳运动。
从动轮模块4包括一块顶板17,顶板17的顶侧与两块安装板7同时连接,顶板17的底侧连接有两个全向轮18,两个全向轮18之间设有用于和全向轮18所行驶的工作面之间产生磁吸附力的从动轮磁铁19。全向轮18在改变前进/后退的状态时不会改变支点,运动更加平稳,能够避免抽吸式清洗盘3两侧的主动轮模块5翘起,保持机器人的磁吸附力,保证机器人在任一姿态都可以实现抽吸式清洗盘5与作业面的良好密封状态,保证抽吸效果,并可以防止机器人从船舶侧壁掉落。