脉宽调制时钟同步
文献发布时间:2023-06-19 18:32:25
技术领域
本公开涉及用于电动车辆的驱动单元的逆变器。
背景技术
每个驱动单元具有两个电动马达的常规电动车辆具有两个逆变器(每个马达一个逆变器),并且每个逆变器由其自身的逆变器控制器控制。用于每个逆变器的单独逆变器控制器的使用增加了重量并增加能量消耗,从而导致车辆行驶里程减少。
发明内容
各种公开的实施方案包括例示性控制器、双功率逆变器模块和电动车辆。
在例示性实施方案中,一种控制器包括用于第一功率逆变器的第一处理器。计算机可读介质被配置为存储计算机可执行指令,该计算机可执行指令被配置为使第一处理器:生成第一时钟信号和第二时钟信号;识别第一功率逆变器的脉宽调制方法和第二功率逆变器的脉宽调制方法;识别并比较第一功率逆变器的切换频率和第二功率逆变器的切换频率;响应于第一功率逆变器的脉宽调制方法和第二功率逆变器的脉宽调制方法以及第一功率逆变器的切换频率和第二功率逆变器的切换频率来确定第一功率逆变器与第二功率逆变器之间的优化相移;以及同步第一功率逆变器与第二功率逆变器之间的优化相移。用于第二功率逆变器的第二处理器被配置为接收第二时钟信号。
在另一个例示性实施方案中,一种双功率逆变器模块包括DC链路电容器,该DC链路电容器可电连接到高压直流(DC)电力源。第一功率逆变器可电连接到DC链路电容器,并且被配置为将高压DC电力转换成三相高压交流(AC)电力。第一功率逆变器被进一步配置为向第一电动马达供应三相高压AC电力。第二功率逆变器可电连接到DC链路电容器,并且被配置为将高压DC电力转换成三相高压AC电力。第二功率逆变器被进一步配置为向第二电动马达供应三相高压AC电力。一种控制器包括:用于第一功率逆变器的第一处理器;计算机可读介质,该计算机可读介质被配置为存储计算机可执行指令,该计算机可执行指令被配置为使第一处理器:生成第一时钟信号和第二时钟信号;识别第一功率逆变器的脉宽调制方法和第二功率逆变器的脉宽调制方法;识别并比较第一功率逆变器的切换频率和第二功率逆变器的切换频率;响应于第一功率逆变器的脉宽调制方法和第二功率逆变器的脉宽调制方法以及第一功率逆变器的切换频率和第二功率逆变器的切换频率来确定第一功率逆变器与第二功率逆变器之间的优化相移;以及同步第一功率逆变器与第二功率逆变器之间的优化相移。用于第二功率逆变器的第二处理器被配置为接收第二时钟信号。
在另一个例示性实施方案中,一种电动车辆包括:车身;设置在车身内的高压直流(DC)电池;可机械地耦合以旋转至少一组轴线(例如,车轮)的第一电动马达和第二电动马达(例如,左电动马达和右电动马达);和至少一个双功率逆变器模块。该至少一个双功率逆变器模块包括:DC链路电容器,该DC链路电容器可电连接到高压DC电池;第一功率逆变器,该第一功率逆变器能够电连接到DC链路电容器并且被配置为将高压DC电力转换成三相高压交流(AC)电力,该第一功率逆变器被进一步配置为向选自第一电动马达和第二电动马达(例如,左电动马达和右电动马达)的电动马达供应三相高压AC电力;第二功率逆变器,该第二功率逆变器能够电连接到DC链路电容器并且被配置为将高压DC电力转换成三相高压AC电力,该第二功率逆变器被进一步配置为向选自第一电动马达和第二电动马达(例如,左电动马达和右电动马达)的另一电动马达供应三相高压AC电力;和公共控制器,该公共控制器能够电连接到第一功率逆变器和第二功率逆变器,该公共控制器被配置为控制第一功率逆变器和第二功率逆变器。公共控制器包括:用于第一功率逆变器的第一处理器;计算机可读介质,该计算机可读介质被配置为存储计算机可执行指令,该计算机可执行指令被配置为使第一处理器:生成第一时钟信号和第二时钟信号;识别第一功率逆变器的脉宽调制方法和第二功率逆变器的脉宽调制方法;识别并比较第一功率逆变器的切换频率和第二功率逆变器的切换频率;响应于第一功率逆变器的脉宽调制方法和第二功率逆变器的脉宽调制方法以及第一功率逆变器的切换频率和第二功率逆变器的切换频率来确定第一功率逆变器与第二功率逆变器之间的优化相移;以及同步第一功率逆变器与第二功率逆变器之间的优化相移。用于第二功率逆变器的第二处理器被配置为接收第二时钟信号。
上述发明内容仅为例示性的,并非旨在以任何方式进行限制。除了上述例示性方面、实施方案和特征之外,通过参照附图和以下具体实施方式,另外的方面、实施方案和特征将变得显而易见。
附图说明
例示性实施方案在附图的参考图中示出。本文所公开的实施方案和附图旨在被认为是例示性的而非限制性的。
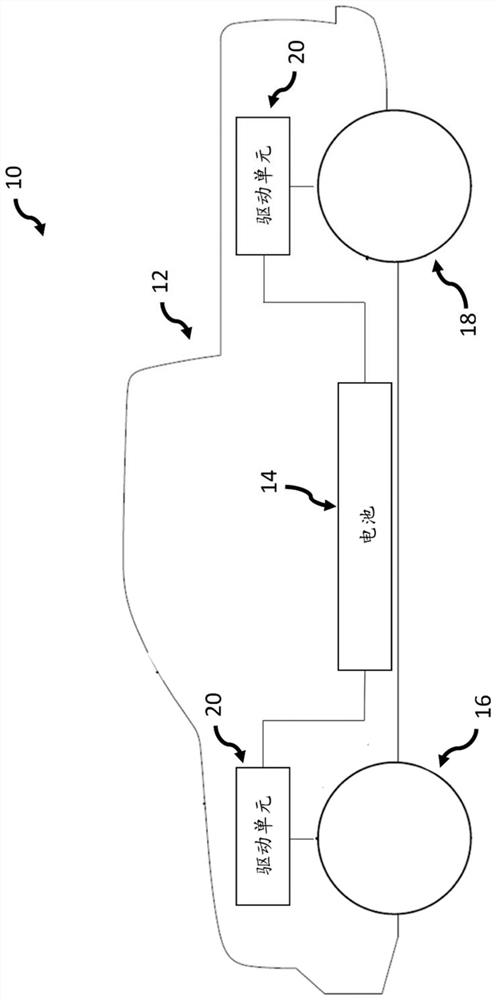
图1A是具有至少一个驱动单元的例示性电动车辆的示意图。
图1B是带有例示性驱动单元的图1的电动车辆的下车身结构的透视图。
图2A是图1B的例示性驱动单元的透视图。
图2B是图1B的驱动单元的另一个透视图。
图2C是图1B的驱动单元的侧平面视图。
图2D是图1B的驱动单元的分解透视图。
图2E是另一个例示性驱动单元的透视图。
图3A是带有公共控制的例示性双逆变器的局部示意图形式的框图。
图3B是带有公共控制的例示性双逆变器的透视图。
图4A是带有公共DC链路电容器的例示性双逆变器的简化示意图。
图4B和图4C是没有消除的纹波波形的曲线图。
图4D是用于使脉宽调制时钟同步的例示性方法的流程图。
图4E和图4F是带有消除的例示性纹波波形的曲线图。
图4G示出了查找表。
图5A是被配置为响应于与任一逆变器相关联的检测到的故障而将驱动单元的两个逆变器放置在安全状态的例示性部件的框图。
图5B是扭矩对速度的曲线图。
图5C是图5A的部件的细节的框图。
图5D是开路的上组和下组三端功率半导体器件的简化示意图。
图5E是短路的下组三端功率半导体器件的简化示意图。
图5F是短路的上组三端功率半导体器件的简化示意图。
图5G是响应于与任一逆变器相关联的检测到的故障而将驱动单元的两个逆变器放置在安全状态的例示性方法的流程图。
图6A是用于检测低压DC电力的损失的例示性电路的示意图。
图6B是用于提供低压DC电力的例示性备用电路的细节的局部示意图形式的框图。
图6C是响应于低压DC电力的损失而将驱动单元的两个逆变器放置在安全状态的方法的流程图。
各种图式中的相同的参考符号大体上指示相同的元件。
具体实施方式
在以下具体实施方式中,参照了附图,该附图形成具体实施方式的一部分。在附图中,除非上下文另外指出,否则类似的符号通常标识类似的部件。具体实施方式、附图和权利要求书中所述的例示性实施方案并非意在进行限制。在不脱离此处所呈现的主题的精神或范围的情况下,可以利用其他实施方案,并且可以作出其他改变。
各种公开的实施方案包括例示性双功率逆变器模块、电动车辆和方法。
现在参考图1A和图1B并以概述的方式给出,在各种实施方案中,电动车辆10包括车身12。高压直流(DC)电池14设置在车身12内。左前轮和右前轮16(仅示出了左前轮16)以及左后轮和右后轮18(仅示出了左后轮18)被配置为旋转。至少一个驱动单元20可机械地耦合以旋转前轮16或后轮18(并且在一些实施方案中,一个驱动单元20可机械地耦合以旋转前轮16,并且另一个驱动单元20可机械地耦合以旋转后轮18)。每个驱动单元20可电连接以从电池14接收高压DC电力。每个驱动单元20包括轮轴22A和22B,该轮轴可机械地耦合以旋转相关联车轮16或18;和电动马达24A和24B,该电动马达可机械地耦合以分别旋转其相关联轮轴22A和22B。如下文将解释的,每个驱动单元20还包括双功率逆变器模块26,该双功率逆变器模块可电连接以从电池14接收高压DC电力。双功率逆变器模块26包括两个逆变器(未示出),该逆变器被配置为从高压DC电力产生三相高压交流(AC)电力并且向相关联电动马达提供三相高压AC电力。公共控制器(未示出)被配置为控制双功率逆变器模块26中的逆变器两者。
为简明起见,下面以非限制性示例的方式在机动车辆的上下文中阐述例示性细节。然而,应当理解,车辆10可为根据需要的任何类型的车辆,而无限制。以非限制性示例的方式给出,在各种实施方案中,车辆10可为电动车辆(即,全电动车辆)或混合动力车辆。例如并且以非限制性示例的方式给出,在各种实施方案中,车辆10可包括由车轮和/或轨道驱动的机动车辆,诸如但不限于汽车、卡车、运动型多功能车(SUV)、货车、全地形车(ATV)、摩托车、电动自行车、牵引机、割草机,诸如但不限于骑乘式割草机、雪地摩托等。以另外的非限制性示例的方式给出,在各种实施方案中,车辆10可包括航海船舶,诸如但不限于小船、轮船、潜水艇、潜水器、自主水下载具(AUV)等。以另外的非限制性示例的方式给出,在各种实施方案中,车辆10可包括飞行器,诸如但不限于固定翼形飞行器、旋转翼形飞行器和轻于空气(LTA)航空器。
另外为简明起见,在机动车辆的上下文中阐述了关于驱动单元20的例示性细节。由于车辆10不限于机动车辆的例示性示例,因此应当理解,驱动单元20也不限于适用于机动车辆。为此,在各种实施方案中,驱动单元20的一个(或多个)马达被构造成驱动车辆10。也就是说,在各种实施方案中,驱动单元20的一个(或多个)电动马达可驱动驱动任何推进装置的任何驱动构件,诸如但不限于与车辆10相关联的一个或多个车轮、一个或多个轨道、一个或多个螺旋桨、一个或多个推进器、一个或多个转子等。
例如,在机动车辆的一些实施方案中,一个驱动单元20可包括一个马达,该马达被构造成驱动一个驱动构件(诸如轮轴或链环),该驱动构件驱动一个车轮或轨道;在机动车辆的一些其他实施方案中,一个驱动单元20可包括一个马达,该马达被构造成驱动轮轴,该轮轴旋转两个车轮或两个轨道;并且在机动车辆的一些其他实施方案中,一个驱动单元20可包括:一个马达,该马达被构造成驱动轮轴,该轮轴旋转一个车轮或一个轨道;和另一个马达,该另一个马达被构造成驱动另一个轮轴,该另一个轮轴旋转另一个车轮或另一个轨道。
类似地,在航海船舶的一些实施方案中,一个驱动单元20可包括一个马达,该马达被构造成驱动一个螺旋桨或推进器;在航海船舶的一些其他实施方案中,一个驱动单元20可包括一个马达,该马达被构造成驱动轴,该轴旋转两个螺旋桨或两个推进器;并且在航海船舶的一些其他实施方案中,一个驱动单元20可包括:一个马达,该马达被构造成驱动轴,该轴旋转一个螺旋桨或推进器;和另一个马达,该另一个马达被构造成驱动另一个轴,该另一个轴旋转另一个螺旋桨或推进器。
同样,在飞行器的一些实施方案中,一个驱动单元20可包括一个马达,该马达被构造成驱动一个螺旋桨或转子;在飞行器的一些其他实施方案中,一个驱动单元20可包括一个马达,该马达被构造成驱动轴,该轴旋转两个螺旋桨或两个转子;并且在飞行器的一些其他实施方案中,一个驱动单元20可包括:一个马达,该马达被构造成驱动轴,该轴旋转一个螺旋桨或转子;和另一个马达,该另一个马达被构造成驱动另一个轴,该另一个轴旋转另一个螺旋桨或转子。
既然已阐述了概述,将以示例的方式解释例示性细节,这些示例仅作为说明而非限制给出。
如上所述,至少一个驱动单元20可机械地耦合以旋转前轮16或后轮18(并且在一些实施方案中,一个驱动单元20可机械地耦合以旋转前轮16,并且另一个驱动单元20可机械地耦合以旋转后轮18)。还如上文所提及,每个驱动单元20包括轮轴22A和22B,该轮轴可机械地耦合以旋转相关联车轮16或18;和电动马达24A和24B,该电动马达可机械地耦合以分别旋转其相关联轮轴22A和22B。
另外参考图2A至图2E,在各种实施方案中,每个电动马达24A和24B分别经由齿轮组28A和28B分别可机械地耦合到其相关联轮轴22A和22B。齿轮组28A和28B中的每一者被配置为提供分别从其相关联电动马达24A或24B分别到其相关联轮轴22A或22B,并且最终到相关联车轮16或18的速度和扭矩转换。
如图2D所示,轴21A被配置为通过其电动马达24A的其相关联转子27旋转,并且轴21B被配置为通过其电动马达24B的其相关联转子27旋转。轴21A和21B被支撑并约束在设置于框架19上的轴承(未示出)内。齿轮组28A设置在框架19内并且被配置为可旋转地接合轮轴22A,并且齿轮组28B设置在框架19内并且被配置为可旋转地接合轮轴22B。电动马达24A被配置为可旋转地接合齿轮组28A,并且电动马达24B被配置为可旋转地接合齿轮组28B。
在各种实施方案中,齿轮组28A和28B中的每一者被配置为提供从其相关联电动马达24A或24B到其相关联轮轴22A或22B,并且最终到相关联车轮16或18的速度和扭矩转换。例如并且仅以说明而非限制的方式给出,在各种实施方案中,齿轮28C被配置为通过其相关联轴21A或21B旋转。齿轮28D安装在轴(为了清楚起见,未示出)上,并且被配置为由齿轮28C啮合接合。齿轮28E也安装在轴(为了清楚起见,未示出)上。齿轮28F安装在轮轴22A或22B上,并且被配置为由齿轮28E啮合接合。应当理解,在各种实施方案中,齿轮组28A和28B可包括任何数量的合适的齿轮(诸如但不限于行星齿轮),其中齿轮比根据特定应用的需要进行选择以实现所需的速度和扭矩转换。应当理解,用于电动车辆的齿轮是本领域众所周知的。因此,为了理解本发明所公开的主题,不需要进一步描述它们的构造和操作。
在一些实施方案中,轮轴22A和22B可固定地耦合到其相关联车轮16或18。例如但不限于,在一些此类实施方案中,前轮16可固定地耦合到其相关联轮轴22A和22B。应当理解,此类固定耦合可有助于降低机械复杂性,并且可有助于使前轮16能够保持可转向(诸如当在前轮16和后轮18接合在路面上的情况下拖曳车辆10时(即,平拖))。
在一些其他实施方案中,轮轴22A和22B可以可移除地耦合到其相关联车轮16或18。例如但不限于,在一些此类实施方案中,后轮18可以可移除地耦合到其相关联轮轴22A和22B。应当理解,后轮18的此类可移除耦合可有助于避免在拖曳期间生成制动扭矩和/或不受控制的发电。
应当理解,每个驱动单元20驱动左右前轮16或左右后轮18。因此,给定驱动单元20的电动马达24A和24B两者可以经历相同或相似的速度和扭矩需求范围。为了服务此类速度和扭矩需求范围,在各种实施方案中,给定驱动单元20的电动马达24A和24B两者可以具有相同的电压和电流额定值。例如,在各种实施方案中(诸如在高压系统中),线间电压额定值可以在约300Vrms到约600Vrms的范围内,并且电流额定值可以在约300Arms到约900Arms的范围内。仅以非限制性示例的方式作为说明给出,例示性电压额定值可以是312Vrms,并且例示性电流额定值可以是550Arms(基于400VDC系统)。然而,应当理解,电动马达24A和24B可以具有特定应用所需的任何电压额定值和任何电流额定值。
在各种实施方案中,电动马达24A和24B可以是根据需要的任何合适类型的电动马达。例如,在一些实施方案中,电动马达24A和24B可以包括同步电动马达。在一些此类实施方案中,同步电动马达可以包括但不限于永磁体电动马达等。在一些其他实施方案中,电动马达24A和24B可以包括但不限于异步马达(或感应马达),类似于多相AC感应马达等。
如上所述,在各种实施方案中,每个驱动单元20驱动左右前轮16或左右后轮18,并且因此,给定驱动单元20的电动马达24A和24B两者可以经历相同或相似的速度和扭矩需求范围。因此,在各种实施方案中,给定驱动单元20的两个逆变器可以具有相同的电压输出额定值和相同的电流输出额定值。仅作为说明而非限制给出,在各种实施方案中,给定驱动单元20的两个逆变器可以具有312Vrms的电压输出额定值和550Arms的电流输出额定值(基于400VDC输入)。然而,应当理解,给定驱动单元20的逆变器可以具有特定应用所需的任何电压输出额定值和任何电流输出额定值。
应当理解,在各种实施方案中,双功率逆变器模块26可以特定应用所需的任何合适的方式与框架19物理相关联。例如但不限于,在一些实施方案中,并且如图2A至图2C所示,双功率逆变器模块26可以是密封容器内的模块并且物理地设置在框架外部的框架19上。作为另一示例并且如图2E所示但无限制地,在一些其他实施方案中,双功率逆变器模块26可以与框架19集成地安装。在一些此类实施方案中,壳体29具有限定在其中的开口面(未示出)。逆变器电路(如下所述)设置在壳体29中。在此类实施方案中,壳体29的开口面与框架19中的开口(未示出)配合。此类其他实施方案在2021年4月29日提交的名称为“可与车辆驱动单元集成安装的逆变器模块”的共同拥有的美国专利申请序列号17/244,288中讨论,该专利申请转让给并由申请人提交,其全部内容以引用方式并入本文。
另外参考图3A和图3B,在各种实施方案中,提供了双功率逆变器模块(DPIM)26。如上所述,在各种实施方案中,DPIM 26包括两个逆变器30A和30B,该逆变器被配置为从高压DC电力产生三相高压AC电力并向相关联电动马达24A或24B提供三相高压AC电力;和公共控制器32,该公共控制器被配置为控制逆变器30A和30B两者。
在各种实施方案中,DC链路电容器34可电连接到高压DC电力源,诸如电池14。在一些实施方案中,到电池14的电连接件可包括电连接件36。合适的电缆38可以电连接到电连接件36并且可以电连接到电池14。
在各种实施方案中,功率逆变器30A可电连接到DC链路电容器34,并且被配置为将高压DC电力转换成三相高压AC电力。功率逆变器30A被进一步配置为向电动马达24A(诸如,右马达或左马达)供应三相高压AC电力。功率逆变器30B可电连接到DC链路电容器34,并且被配置为将高压DC电力转换成三相高压AC电力。功率逆变器30B被进一步配置为向电动马达24B(诸如左马达或右马达中的另一者)供应三相高压AC电力。
在各种实施方案中,公共控制器32可电连接到功率逆变器30A和功率逆变器30B。公共控制器32被配置为控制功率逆变器30A和功率逆变器30B。公共控制器32可为根据需要的任何合适的基于计算机处理器的控制器。仅以示例而非限制的方式给出,在各种实施方案中,公共控制器32可包括计算机处理单元(CPU)、通用处理器、数字信号处理器、现场可编程门阵列等和/或它们的任何组合。虽然控制器是众所周知的并且对其构造和操作的进一步描述不必用于理解所公开的主题,但是关于公共控制器32的进一步细节将在下面关于附加功能阐述。
在各种实施方案中,公共控制器32可电连接以接收低压DC电力,诸如12VDC。公共控制器32还可电连接以接收车辆状态信号和车辆故障指示信号。下文将进一步讨论对各种车辆故障和12VDC损失的例示性响应。
在各种实施方案中,功率逆变器30A和功率逆变器30B各自包括三端功率半导体器件42的组40和三端功率半导体器件42的组44。
在一些实施方案中,三端功率半导体器件42可以包括绝缘栅双极晶体管(IGBT)。在一些此类实施方案中,IGBT可以包括硅(Si)IGBT。在一些实施方案中,三端功率半导体器件42可以包括金属氧化物半导体场效应晶体管(MOSFET)。在一些此类实施方案中,MOSFET可以包括碳化硅(SiC)MOSFET。然而,应当理解,三端功率半导体器件42还可以包括功率半导体器件42,该功率半导体器件包括至少三个端子,并且可以包括额外端子,诸如,例如但不限于开尔文源端子、开尔文发射器端子、电流感测端子和/或温度感测端子。
应当理解,SiC MOSFET可以在低相电流下提供优于Si IGBT的优点,并且与在700Apk以下的IGBT相比,SiC MOSFET具有较低的传导降。然而,应当理解,该值可以根据逆变器的大小而改变。因此,应当理解,与Si IGBT相比,SiC MOSFET可以在典型的驱动循环中提供高达约3%至5%的效率增益。
在一些全轮驱动(AWD)电动车辆10中,前轮16用作唯一的驱动轮,直到需要超出预定量的额外的扭矩和/或电力。在此类电动车辆10中,当要递送超出预定量的扭矩和/或电力时,后轮仅由其相关联驱动单元20驱动。在一些此类AWD电动车辆10中,为了利用SiCMOSFET相对于Si IGBT的效率,驱动前轮16的驱动单元20可以包括具有SiC MOSFET的逆变器40,并且驱动后轮18的驱动单元20可以包括具有Si IGBT的逆变器40。然而,应当理解,驱动单元20中的任何驱动单元可以包括逆变器40,该逆变器根据需要包括SiC MOSFET或SiIGBT。
在各种实施方案中,功率逆变器30A包括栅极驱动电路46A,该栅极驱动电路被配置为驱动功率逆变器30A的三端功率半导体器件42的组40和44的栅极端子48。类似地,功率逆变器30B包括栅极驱动电路46B,该栅极驱动电路被配置为驱动功率逆变器30B的三端功率半导体器件42的组40和44的栅极端子48。在各种实施方案中,除其他功能外,控制器32被配置为生成低功率接通和断开信号66A和66B,并且分别向栅极驱动电路46A和46B提供接通和断开信号66A和66B。低功率接通和断开信号66A和66B可以为大约几毫安的电流和逻辑电平电压(诸如3.3V或5V)。
在各种实施方案中,栅极驱动电路46A和46B包括合适的功率放大器,该合适的功率放大器放大低功率接通和断开信号66A和66B,并且生成高功率接通和断开信号66A'和66B'。为了驱动栅极端子48,高功率接通和断开信号66A'和66B'可以为几百毫安的电流或大约安培的电流,其中电压在15V至20V的范围内,根据特定应用的需要。高功率接通和断开信号66A'和66B'继而电耦合以驱动相关联栅极端子48。栅极驱动电路是众所周知的并且对其构造和操作的进一步描述不必用于理解所公开的主题。
鉴于以上通过非限制性示例提供的例示性细节,应当理解,在各种实施方案中,为两个逆变器30A和30B提供一个控制器32可以提供以下用途:(i)用于车辆状态信号和车辆故障指示信号的单个接口;(ii)单个DC链路电容器34;(iii)单个公共控制器32;和(iv)用于低压DC电力(诸如12VDC)的单个接口。
鉴于以上通过非限制性示例提供的例示性细节,应当理解,在各种实施方案中,将DPIM 26的安装与驱动单元20集成可以提供冷却剂接口的集成。例如,在各种实施方案中,为逆变器30A和30B提供的水冷却可以提供给电动马达24A和24B的定子绕组。
如上所述,在各种实施方案中,单个马达24A或24B驱动单个车轮,诸如一个前轮16或一个后轮18。应当理解,每个车轮可以以独特的速度和扭矩操作。以非限制性示例的方式给出,绕过曲线或失去牵引力可产生不同的车轮速度,而牵引力控制或扭矩矢量分配可导致不同的车轮扭矩。也如上文所述,在各种实施方案中,双功率逆变器模块26将两个逆变器30A和30B组合成一个模块26,并且因此共享公共部件,诸如DC链路电容器34。
为此,各种实施方案仅包括一个DC链路电容器34,该DC链路电容器可电连接以向DPIM 26的逆变器30A和30B两者提供高压DC电力。应当理解,可期望减少和可能最小化DC链路电容器34的大小。如下文所解释,各种实施方案可有助于减小由于从逆变器30A和30B产生的高频电流谐波而导致的DC链路电容器34上的应力(其可以具有减小的尺寸)和DC高压总线(其可以包括电缆38)上的纹波电流。
在各种实施方案中,逆变器30A和30B使用脉宽调制(PWM)来产生可变振幅和频率电压源以驱动电动马达24A和24B。可以根据特定情况的需要采用不同的PWM方法(诸如,例如,连续PWM和不连续PWM)。PWM方法中的每种PWM方法都会产生其自己独特的纹波电流谐波频谱,该谐波频谱可以在DC总线上反射。
例如,在连续PWM中,每个相连续切换(即,在各种实施方案中,逆变器30A和30B两者中的三端功率半导体器件42中的所有三端功率半导体器件都连续切换)。因此,连续PWM可以导致逆变器30A和30B中的切换损耗量不显著。在连续PWM中,切换频率的第二谐波是纹波电流中的主要谐波频率。连续PWM(诸如空间矢量调制)可用于以下情况,诸如当期望最小化AC输出和DC输入电流上的谐波含量和纹波,以及最小化声学噪声。例如,一些车辆可能会在高扭矩下使用连续PWM来最小化声学噪声。
作为另一示例,在不连续PWM中,每个相不连续切换(即,在各种实施方案中,逆变器30A和30B两者中的三端功率半导体器件42中的所有三端功率半导体器件都不连续切换)。在此类实施方案中,在任何时间三个相中的仅两个相进行切换,并且剩余的第三相使上部或下部开关连续接通,从而有助于增加逆变器效率并有助于减少不连续PWM期间的损耗。应当理解,不连续PWM的使用可以具有其他非有益效果,诸如AC输出或DC输入电流中的声学噪声或谐波含量增加。在不连续PWM中,每个相具有两个60度区段,其中开关保持低或高,并且不在基本周期内切换总共120度。也就是说,在不连续PWM中,每个相在三分之一的时间内没有切换。这导致显著较低的切换损耗和更高的效率。应当理解,虽然不连续PWM需要比在连续PWM中所需的切换损耗更低的切换损耗,但是不连续PWM可需要比与连续PWM相关联的声学噪声更高的声学噪声,并且谐波可放置在马达24A和24B以及DC链路电容器34上。在不连续PWM中,切换频率的第一谐波是主要谐波频率。在期望最高效率和最低损耗的情况下,可以使用不连续PWM,并且声学噪声不是问题。例如,一些车辆可能在高扭矩下具有热问题,并且因此,使用不连续PWM来减少那些条件下的损耗。
在各种实施方案中并且另外参考图4A,DC链路电容器34用于将电感L
另外参考图4D,在各种实施方案中,提供了用于使脉宽调制时钟同步的方法52。应当理解,在各种实施方案中,使脉宽调制时钟同步可有助于消除纹波电流50。方法52在框53处开始。在框54处,识别第一功率逆变器的脉宽调制方法和第二功率逆变器的脉宽调制方法。在框56处,识别并比较第一功率逆变器的切换频率和第二功率逆变器的切换频率。在框58处,响应于第一功率逆变器的脉宽调制方法和第二功率逆变器的脉宽调制方法以及第一功率逆变器的切换频率和第二功率逆变器的切换频率来确定第一功率逆变器与第二功率逆变器之间的优化相移。在框60处,优化相移在第一功率逆变器与第二功率逆变器之间同步。
方法52在框61处结束。
如图4E和图4F所示并且仅作为说明而非限制给出,马达电流为550Arms,调制指数为0.48,功率因数为1,切换频率为10KHz,并且基频为250Hz,通过本文所述的消除,纹波电流50可以减小到具有大约147Arms的振幅。
考虑到以上概述,在各种实施方案中,并且如图3A所示,公共控制器32包括处理器64A和处理器64B。在一些实施方案中,处理器64A和64B可以是单独的处理器。然而,应当理解,在一些其他实施方案中(使用两个PWM发生器),可以根据特定应用的需要将处理器64A和64B的功能组合到单个处理器中。无论处理器64A和64B是分离的还是组合到单个处理器中,应当理解,处理器64A充当主处理器且处理器64B充当从处理器。
处理器64A可操作地耦合到计算机可读介质65A,诸如任何合适的计算机存储器,该任何合适的计算机存储器被配置为存储计算机可执行指令,该计算机可执行指令被配置为使处理器64A执行下文所描述的功能。处理器64B可操作地耦合到计算机可读介质65B,诸如任何合适的计算机存储器,该任何合适的计算机存储器被配置为存储计算机可执行指令,该计算机可执行指令被配置为使处理器64B执行下文所描述的功能。处理器64A被配置为生成用于控制用于驱动功率逆变器30A的接通和断开信号66A的生成的第一时钟信号(例如,使用晶体)和第二时钟信号。第二时钟信号被提供给处理器64B以控制用于驱动功率逆变器30B的接通和断开信号66B的生成。
处理器64A选择用于功率逆变器30A的PWM方法,并且处理器64B选择用于功率逆变器30B的PWM方法。处理器64B(即,从处理器)通知处理器64A(即,主处理器)其PWM方法(除了不采用PWM方法切换的情况之外)。上文已经讨论了用于选择连续PWM和不连续PWM的因素。
处理器64A选择用于功率逆变器30A的切换频率,并且处理器64B选择用于功率逆变器30B的切换频率。频率是彼此的偶数倍,并且选自预定值。仅作为说明而非限制给出,在各种实施方案中,切换频率可以为2.5KHz和10KHz,从而导致四的偶数倍。然而,应当理解,可以根据需要选择其他频率(导致偶数倍)。在各种实施方案中,处理器64A(即,主处理器)输出处于最低可选择频率的参考,其中期望的相移作为PWM模式的函数。
处理器64A被配置为响应于功率逆变器30A的PWM方法和功率逆变器30B的PWM方法以及功率逆变器30A的切换频率和功率逆变器30B的切换频率来确定功率逆变器30A与功率逆变器30B之间的优化相移。例如,在一些此类实施方案中并且另外参考图4G,处理器64A可以访问查找表68,该查找表填充有包含根据PWM方法的行70和PWM方法的列72布置的优化相移值的单元。应当理解,在一些实施方案中,功率逆变器30A的PWM方法和功率逆变器30B的PWM方法可以是相同的脉宽调制方法。还应了解,在一些其他实施方案中,功率逆变器30A的PWM方法和功率逆变器30B的PWM方法可以是不同的PWM方法。
如图4G所示,当电源逆变器30A和30B两者都使用连续PWM时,相移设置为90度。当电源逆变器30A和30B两者都使用不连续PWM时,相移设置为180度。在不同PWM方法的情况下,相设置为90度。
在一些其他此类实施方案中,处理器64A可以执行用于响应于功率逆变器30A的PWM方法和功率逆变器30B的PWM方法而确定功率逆变器30A与功率逆变器30B之间的优化相移的算法。例如,算法可以包括若则(if-then)语句,诸如:
若两种PWM方法都是连续PWM,则优化相移为90度;
若两种PWM方法都是不连续PWM,则优化相移为180度;和
若一种PWM方法是连续PWM,并且另一种PWM方法是不连续PWM,则优化相移为90度。
处理器64A还被配置为使功率逆变器30A与功率逆变器30B之间的优化相移同步。如上所述,处理器64B被配置为接收第二时钟信号并驱动功率逆变器30B。
在各种实施方案中,处理器64A被进一步被配置为通过确定的优化相移将第二时钟信号从第一时钟信号移位。
在各种实施方案中,处理器64A被进一步配置为识别功率逆变器30A的PWM方法和功率逆变器30B的PWM方法的谐波频率之间的主要谐波频率,并且响应于功率逆变器30A的PWM方法和功率逆变器30B的PWM方法的谐波频率之间的主要谐波频率来确定功率逆变器30A与功率逆变器30B之间的优化相移。应当理解,响应于功率逆变器30A的PWM方法和功率逆变器30B的PWM方法的谐波频率之间的主要谐波频率来确定功率逆变器30A与功率逆变器30B之间的优化相移可有助于消除纹波电流50的主要高频分量。
在一些此类实施方案中,主要谐波频率可以包括第二谐波频率(切换频率的谐波)。例如,在此类实施方案中,PWM方法可以包括连续PWM。在此类实施方案中,优化相移为90度。应当理解,90度的相移将主要谐波(第二谐波频率)偏移180度,从而导致纹波电流50的主要谐波分量的消除。
在一些其他此类实施方案中,主要谐波频率可以包括第一谐波频率。例如,在此类实施方案中,PWM方法可以包括不连续PWM。在此类实施方案中,优化相移为180度。应当理解,180度的相移将主要谐波(第一谐波频率)偏移180度,从而导致纹波电流50的主要谐波分量的消除。
应当理解,实际DC总线谐波可以驻留在围绕切换频率的侧带组中。这些谐波从切换频率谐波的分离是马达基频的函数。
在各种实施方案中,处理器64A被配置为识别并比较功率逆变器30A的切换频率和功率逆变器30B的切换频率。如上所述,仅使用彼此为偶数倍的两个频率。
例如,在一些实施方案中,可以期望改变切换频率。例如,在一些实施方案中,切换频率可为10KHz。在此类实施方案中,在低马达速度(例如,低于500RPM)下,可以期望将切换频率降低到2.5KHz以保护逆变器30A和30B中的开关42,从而有助于减少逆变器30A和30B中的应力。在切换频率之间保持偶数关系允许谐波对齐和提高消除主要谐波的机会。
其中每个车轮由其自身的相关联电动马达经由其自身的轮轴独立地驱动的电动车辆在车轮之间不具有任何机械耦合。在此类车辆中,如果一个逆变器由于故障而关闭,并且另一逆变器不适当反应,则两个车轮之间可能存在扭矩差。此类所得的扭矩差可能对车辆的可控性具有负面影响。
为了帮助避免此类扭矩差并且另外参考图5A至图5G,在各种实施方案中,与功率逆变器30A或功率逆变器30B(或下文描述的与逆变器30A和30B两者相关联的电路)相关联的故障导致对逆变器30A和30B两者应用相同的故障动作(如下所述)。在此类实施方案中,对逆变器30A和30B两者应用相同的故障动作将逆变器30A和30B置于“安全状态”,并且有助于将均衡的扭矩施加到与包括逆变器30A和30B的驱动单元20相关联的车轮两者。通过对逆变器30A和30B两者应用相同的故障动作并将扭矩均衡到与包括逆变器30A和30B的驱动单元20的车轮两者,各种实施方案能够有助于减少可能对车辆的可控性具有负面影响的扭矩差产生的可能性。
如上所述,处理器64A可操作地耦合到计算机可读介质65A,诸如任何合适的计算机存储器,该任何合适的计算机存储器被配置为存储计算机可执行指令,该计算机可执行指令被配置为使处理器64A执行下文所描述的功能。还如上所述,处理器64B可操作地耦合到计算机可读介质65B,诸如任何合适的计算机存储器,该任何合适的计算机存储器被配置为存储计算机可执行指令,该计算机可执行指令被配置为使处理器64B执行下文所描述的功能。在各种实施方案中并且如下文将描述的,计算机可执行指令被配置为使其相关联处理器64A和64B分别对功率逆变器30A和功率逆变器30B应用相同的故障动作,以响应于与功率逆变器30A或功率逆变器30B相关联的故障来将均衡的扭矩施加到操作地耦合到驱动单元20的每个车轮16或18。
在各种实施方案中并且如图5A所示,与逆变器30A和30B相关联的各种故障分别由处理器64A和64B针对逆变器30A和30B监测。对于此类故障,在各种实施方案中,处理器64A和64B对逆变器30A和30B两者的三端功率半导体器件42(图3A)应用相同的故障响应。在各种实施方案中,与逆变器30A和30B相关联并且分别由处理器64A和64B监测的此类故障可以包括但不限于过电流、过电压、欠压、超温、超速等。在各种实施方案中,指示此类故障的信号可以经由数据链路74提供给控制器32,该数据链路可以根据需要包括任何合适的数据通信连接或网络,诸如但不限于广域网(WAN)、局域网(LAN)、控制器局域网(CAN)、对等网络、数据总线等并且提供给处理器64A和64B。在各种实施方案中,指示车辆状态的信号(诸如马达速度和电池14的电压)也经由数据链路74提供给控制器32。
在各种实施方案中并且也如图5A所示,控制器32包括处理器64A和64B之间的通信链路82。应当理解,通信链路82可以使处理器64A或处理器64B能够分别向其他处理器64B或64A传达已经检测到由处理器64A或处理器64B监测的故障,将采取故障动作,以及将采取什么故障动作。通信链路82可以根据需要包括任何合适的数据链路或数据总线。
在各种实施方案中,由处理器64A和64B分别针对逆变器30A和30B监测的故障的故障动作可以包括诸如使逆变器30A和30B的三端半导体器件42中的所有三端半导体器件开路和/或使逆变器30A和30B的排40或排44的三端半导体器件42短路。如下文将解释的,在各种实施方案中,针对由处理器64A和64B监测的故障而对逆变器30A和30B两者施加的故障动作取决于马达的速度。如下文还将解释的,针对未被处理器64A和64B监测的故障而对逆变器30A和30B两者施加的故障动作不取决于马达的速度。
在各种实施方案中并且如上所述,在各种实施方案中,由处理器64A和64B分别针对逆变器30A和30B监测的故障的故障动作可以包括诸如使逆变器30A和30B的三端半导体器件42中的所有三端半导体器件开路和/或使逆变器30A和30B的排40或排44的三端半导体器件42短路并且可以取决于马达的速度。对于由处理器64A和64B监测的此类故障,应当理解,同时对逆变器30A和30B两者应用的故障动作可有助于减少制动扭矩并减少到电池14的再生电流。因为处理器64A和64B操作地耦合到各种数据通信连接或网络以接收关于马达的速度的数据,所以处理器64A和64B被适当地配置为基于马达的速度确定将应用的相同故障动作。在各种实施方案中,处理器64A为其相关联电动马达24A选择适当的速度依赖性故障动作,并且处理器64B为其相关联电动马达24B选择适当的速度依赖性故障动作。未被处理器64A和64B监测的其他故障的故障动作不取决于马达的速度并且在下文进一步论述。
如图5B所示,在各种实施方案中,将应用到逆变器30A和30B的相同故障动作可以基于马达的速度。在此类实施方案中,相同的故障动作可包括在马达的阈值速度v
如图5B所示,曲线图76针对逆变器30A和30B的三端半导体器件42的各种条件绘制马达的速度与扭矩。曲线78示出了由使逆变器30A和30B的三端半导体器件42中的所有三端半导体器件开路产生的扭矩。在阈值速度v
也如图5B所示,曲线80示出了由三端半导体器件42的组40或组44的三端半导体器件42的三相短路引起的转矩。随着马达的速度从零增加,制动扭矩迅速增加并达到制动扭矩的最大值。随着马达的速度继续增加,制动扭矩减小并接近在马达速度达到阈值速度v
因此,在由处理器64A和64B针对逆变器30A和30B监测故障的各种实施方案中,故障动作合适地包括可有助于将到DC链路电容器34和电池14的制动扭矩和不需要的再生电流同时最小化的速度依赖性故障动作。在此类实施方案中,故障动作合适地包括在马达的速度小于阈值速度v
在各种实施方案中,基于曲线78和曲线图80的故障动作可以使用电池14的反EMF和电压来实施(与响应于报告的马达速度直接采取故障动作相反)。例如,在各种实施方案中,计算马达反EMF并且将其与电池的电压进行比较。在此类实施方案中,当反EMF小于电池电压(通过根据需要选择的设计安全裕度)时,则速度依赖性故障动作包括打开逆变器30A和30B两者的三端功率半导体器件42中的所有三端功率半导体器件。当反EMF超过预定百分比的电池电压时,则速度依赖性故障动作包括使逆变器30A和30B的一组三端功率半导体器件42(即,组40或组44)的三端功率半导体器件42短路。如果需要,使用一定量的迟滞可以防止在不同的故障动作之间来回“抖动”。
如图5A所示,处理器64A与功率逆变器30A相关联,并且处理器64B与功率逆变器30B相关联。存储器65A(即,计算机可读介质)和存储器65B(同样,计算机可读介质)各自被配置为存储计算机可执行指令,该计算机可执行指令被配置为使其相关联处理器64A和64B分别对功率逆变器30A和功率逆变器30B应用相同的故障动作,以响应于与功率逆变器30A或功率逆变器30B相关联的故障来将均衡的扭矩施加到操作地耦合到驱动单元20的每个车轮16或18。
还如图5A所示,在各种实施方案中,指示诸如车辆速度的参数、诸如上述那些的故障等的信号经由数据链路74被供应到控制器32并且被提供给处理器64A和64B。在此类实施方案中,计算机可执行指令被进一步配置为使其相关联处理器64A和64B监测故障。
将低压DC电力(诸如12V)提供给控制器32以根据需要为部件供电。控制器32继而向栅极驱动电路46A和46B提供12V DC电力。
如图5A所示,处理器64A操作地耦合以向组40(有时称为“上组”)的栅极48的驱动器46A1提供控制信号86,并向组44(有时称为“下组”)的栅极48的驱动器46A2提供控制信号88。类似地,处理器64B操作地耦合以向组40(有时称为“上组”)的栅极48的驱动器46B1提供控制信号90,并向组44(有时称为“下组”)的栅极48的驱动器46B2提供控制信号92。在各种实施方案中,驱动器46A1、46A2、46B1和46B2是合适的功率放大器,该合适的功率放大器放大低功率控制信号86、88、90和92,并且生成高功率故障动作信号86'、88'、90'和92',该高功率故障动作信号继而被提供给其相关联栅极端子48。
如图5C所示,在各种实施方案中,向其各自的驱动器46A1、46A2、46B1和46B2提供控制信号86、88、90和92需要额外的电路。每个处理器64A和64B操作地耦合以接收如上所述的故障指示信号,并且处理器64A和64B经由通信链路82彼此操作地耦合。处理器64A操作地耦合以分别向缓冲器94和96提供控制信号86和88,并且处理器64B操作地耦合以分别向缓冲器98和100提供控制信号90和92。缓冲器94、96、98和100是任何合适的缓冲器,例如但不限于八进制缓冲器等。
缓冲器94操作地耦合到驱动器46A1,缓冲器96操作地耦合到驱动器46A2,缓冲器98操作地耦合到驱动器46B1,并且缓冲器100操作地耦合到驱动器46B2。当处理器64A或处理器64B接收到用于相关联逆变器30A或30B的监测的故障指示信号时,接收所监测的故障指示信号的处理器经由通信链路82传达所监测的故障的存在。故障动作如下。
当处理器64A接收到故障指示信号时,处理器64A经由通信链路82向处理器64B传达已经检测到由处理器64A监测的故障,故障动作将由处理器64B采取,并且(如下所述)处理器64B将采取什么故障动作。相反地,当处理器64B接收到故障指示信号时,处理器64B经由通信链路82向处理器64A传达已经检测到由处理器64B监测的故障,故障动作将由处理器64A采取,并且(如下所述)处理器64A将采取什么故障动作。还应了解,在各种实施方案中,接收故障指示信号的处理器还执行故障动作(其要求其他处理器也要采取)。
当马达的速度小于阈值速度vth(或反EMF比电池14的电压小至少设计安全裕度)并且已经检测到故障时,处理器64A和64B生成控制信号86、88、90和92,该控制信号被配置为断开逆变器30A和30B的所有栅极端子48,并且因此导致逆变器30A和30B的三端功率半导体器件42中的所有三端功率半导体器件开路。控制信号86、88、90和92分别提供给缓冲器94、96、98和100,并且继而提供给驱动器46A1、46A2、46B1和46B2,该驱动器向逆变器30A和30B的所有栅极端子48提供故障动作信号86'、88'、90'和92'。如图5D所示,使逆变器30A和30B的组40和44中的三端功率半导体器件42中的所有三端功率半导体器件开路。
当马达的速度大于阈值速度v
应当理解,可以根据需要使逆变器30A和30B两者的组40或44中的任一者的三端功率半导体器件42开路或短路。还应理解,将不会使已经发生故障的三端功率半导体器件42开路或短路(因为它们已经发生故障)。在一些实施方案中并且如图5E所示,使逆变器30A和30B两者的组40的三端功率半导体器件42开路,并且使逆变器30A和30B两者的组44的三端功率半导体器件42短路。在此类实施方案中,处理器64A和64B生成控制信号86和90,该控制信号被配置为断开逆变器30A和30B的组40中的所有栅极端子48,并且因此使逆变器30A和30B的组40中的三端功率半导体器件42中的所有三端功率半导体器件开路。处理器64A和64B还生成控制信号88和92,该控制信号被配置为接通逆变器30A和30B的组44中的所有栅极端子48,并且因此使逆变器30A和30B的组44中的三端功率半导体器件42中的所有三端功率半导体器件短路。控制信号86、88、90和92分别提供给缓冲器94、96、98和100,并且继而提供给驱动器46A1、46A2、46B1和46B2,该驱动器向逆变器30A和30B的所有栅极端子48提供故障动作信号86'、88'、90'和92'。
在一些其他实施方案中并且如图5F所示,使逆变器30A和30B两者的组44的三端功率半导体器件42开路,并且使逆变器30A和30B两者的组40的三端功率半导体器件42短路。在此类实施方案中,处理器64A和64B生成控制信号86和90,该控制信号被配置为断开逆变器30A和30B的组44中的所有栅极端子48,并且因此使逆变器30A和30B的组44中的三端功率半导体器件42中的所有三端功率半导体器件开路。处理器64A和64B还生成控制信号88和92,该控制信号被配置为接通逆变器30A和30B的组40中的所有栅极端子48,并且因此使逆变器30A和30B的组40中的三端功率半导体器件42中的所有三端功率半导体器件短路。控制信号86、88、90和92分别提供给缓冲器94、96、98和100,并且继而提供给驱动器46A1、46A2、46B1和46B2,该驱动器向逆变器30A和30B的所有栅极端子48提供故障动作信号86'、88'、90'和92'。
在各种实施方案中,并且也如图5A和图5C所示,与逆变器30A和30B相关联的各种故障未被用于逆变器30A和30B的处理器64A和64B分别监测,因为此类故障是处理器64A和/或64B中的一者或两者或与处理器64A和64B相关联的电路(如下所述)中的故障。对于此类故障,在各种实施方案中,通过使逆变器30A和30B两者的组40或44中的一者的三端功率半导体器件42(图3A)短路,对逆变器30A和30B两者的三端功率半导体器件42(图3A)应用相同的故障响应。因为处理器64A和64B的功能性在此类故障条件下不可验证,所以不可验证处理器64A和64B能够接收和处理关于马达的速度(或电池14的反EMF或电压)的信息。因此,在此类情况下,需要默认故障动作。在各种实施方案中,默认动作是逆变器30A和30B两者的组44或40中的一者中的三端功率半导体器件42的三相短路。
在各种实施方案中并且如图5A和图5C所示,控制器32包括健康监测电路102,该健康监测电路被配置为分别经由数据链路104和106监测处理器64A和64B的健康。在一些此类实施方案中,健康监测电路102包括现场可编程门阵列(“FPGA”)。在此类实施方案中,健康监测电路102可以被编程为执行安全检查,诸如安全手动检查,并且监测处理器64A和/或64B是否正在正常运行(或完全正常运行)。在一些此类实施方案中,健康监测电路102可被编程为实施滚动计数器以执行对处理器64A和64B的此类监测。在一些此类实施方案中,处理器64A和64B还监测健康监测电路102是否正在运行。因此,健康监测电路102中的故障被认为是与处理器64A和64B相关联的电路中的故障。
在各种实施方案中并且也如图5A和图5C所示,控制器32包括三相短路电路108。在此类实施方案中,三相短路电路108被配置为针对未被处理器64A和64B监测的故障生成故障动作信号(如下所述),因为故障可以包括处理器64A和/或64B和/或健康监测电路102中的故障。由三相短路电路108生成的故障动作信号通过使逆变器30A和30B两者的组40或44中的一者的三端功率半导体器件42(图3A)短路,对逆变器30A和30B两者的三端功率半导体器件42(图3A)应用相同的故障响应。
在各种实施方案中,三相短路电路108位于处理器64A和64B的外部,并且被配置为对功率逆变器30A和功率逆变器30B应用相同的故障动作,以响应于未被64A处理器或处理器64B监测的故障将均衡的扭矩施加到操作地耦合到驱动单元20的每个车轮16或18。如图5A和图5C所示,三相短路电路108被耦合以接收来自健康监测电路102的控制信号110、来自处理器64A的控制信号112以及来自处理器64B的控制信号114。健康监测电路102被配置为响应于经由数据链路104从处理器64A接收到指示处理器64A内的故障的处理器故障指示信号或经由数据链路106从处理器64B接收到指示处理器64B内的故障的处理器故障指示信号而生成控制信号110。处理器64A和64B被配置为分别响应于经由数据链路104和106检测到健康监测电路102的故障(诸如但不限于滚动计数器的故障)而分别生成控制信号112和114。
在各种实施方案中并且如图5C所示,三相短路电路108包括电压调节器116、缓冲器118和缓冲器120。在一些此类实施方案中,电压调节器116包括电压调节器,该电压调节器被配置为将12VDC转换成5VDC。在此类实施方案中,控制信号110、112和114适当地为12VDC信号。响应于应用12VDC控制信号110、112或114中的任一者,电压调节器116输出5VDC控制信号122。控制信号122被输入到缓冲器118和120。缓冲器118被耦合以将控制信号122提供给功率逆变器30A的组44的驱动器46A2。驱动器46A2生成并向功率逆变器30A的组44的栅极端子48提供故障动作信号88',从而使功率逆变器30A的组44的三端功率半导体器件42短路。缓冲器120被耦合以将控制信号122提供给功率逆变器30B的组44的驱动器46B2。驱动器46B2生成并向功率逆变器30B的组44的栅极端子48提供故障动作信号92',从而使功率逆变器30B的组44的三端功率半导体器件42短路。
应当理解,使逆变器30A和30B的组44的三端功率半导体器件42短路仅作为说明而非限制给出。在一些实施方案中,使逆变器30A和30B的组40的三端功率半导体器件42短路(并且使逆变器30A和30B的组44的三端功率半导体器件42保持开路)。
另外参考图5G,在各种实施方案中,提供了一种例示性方法124,其用于对第一功率逆变器和第二功率逆变器应用相同的故障动作,以响应于与第一功率逆变器或第二功率逆变器相关联的故障来将均衡的扭矩施加到操作地耦合到驱动单元的每个车轮。
方法124在框126处开始。在框128处,检测与电动车辆的驱动单元的第一功率逆变器或第二功率逆变器相关联的故障。在框130处,响应于检测到故障,对第一功率逆变器和第二功率逆变器应用相同的故障动作,以将均衡的扭矩施加到操作地耦合到驱动单元的每个车轮。方法124在框130处结束。
在各种实施方案中,用于第一功率逆变器的第一处理器和用于第二功率逆变器的第二处理器可以监测故障。
在各种实施方案中,用于具有与其相关联的故障的逆变器的处理器可以将故障动作传达给用于没有与其相关联的故障的逆变器的处理器。
在各种实施方案中,故障动作可以包括在马达速度小于阈值速度时使第一功率逆变器和第二功率逆变器中所有组三端功率半导体器件开路,或者在马达速度大于阈值速度时使第一功率逆变器和第二功率逆变器中一组三端功率半导体器件短路。
在各种实施方案中,与电动车辆的驱动单元的第一功率逆变器或第二功率逆变器相关联的故障可以包括用于第一功率逆变器的第一处理器、或用于第二功率逆变器的第二处理器、或用于第一处理器和第二处理器的健康监测电路中的故障。
在各种实施方案中,对第一功率逆变器和第二功率逆变器应用相同的故障动作以将均衡的扭矩施加到操作地耦合到驱动单元的每个车轮可以包括由位于第一处理器和第二处理器外部的电路对第一功率逆变器和第二功率逆变器应用相同的故障动作以将均衡的扭矩施加到操作地耦合到驱动单元的每个车轮。
在各种实施方案中,故障动作可以包括使第一功率逆变器和第二功率逆变器中的一组三端功率半导体器件短路。
尽管如此,应当理解,在一些情况下,一个马达的速度可以不同于另一马达的速度。例如,在转弯期间,外部车轮可能比内部车轮旋转更快。类似地,车轮可以在各种车轮打滑情况下以不同的速度旋转。在一些此类情况下,因为处理器64A为其相关联电动马达24A选择适当的速度依赖性故障动作,并且处理器64B为其相关联电动马达24B选择适当的速度依赖性故障动作,驱动单元20的一个马达的速度依赖性故障动作(例如,基于电池14的反EMF和电压)可以与驱动单元20的其他马达的速度依赖性故障动作不同。
除了与上文所述的逆变器30A和30B相关联的故障之外,到控制器32的低压DC电力的损失(诸如12VDC并且在本文中被称为12V)导致对逆变器30A和30B两者应用相同的故障动作,以帮助避免由同一个驱动单元20驱动的两个车轮16或18之间的扭矩不平衡。
应当理解,如图5A和图5C所示,处理器64A和64B、驱动器46A1、46A2、46B1和46B2、健康监测电路102和三相短路电路108均包括由供应到控制器32的低压DC电力(12V)供电的部件。应当理解,供应到控制器32的12V的损失意味着处理器64A和64B、驱动器46A1、46A2、46B1和46B2、健康监测电路102和三相短路电路108不可用于对逆变器30A和30B两者应用相同的故障动作,如上所述。
因此,在各种实施方案中并且如下所述,提供能力以在供应到控制器32的12V损失的情况下对逆变器30A和30B两者应用相同的故障动作。
如图5A和图5C所示并且另外参考图6A至图6B,在各种实施方案中并且借助于概述,检测电路140被配置为检测供应到控制器32的低压DC电力(12V)的损失。备用电源电路84A与功率逆变器30A相关联,并且备用电源电路84B与功率逆变器30B相关联。每个备用电源电路84A和84B被配置为响应于检测到供应到控制器32的低压DC电力的损失而将高压DC电力(诸如450VDC)转换成低压DC电力(诸如,例如降压DC-DC转换器)。三相短路电路108被配置为对功率逆变器30A和功率逆变器30B应用相同的故障动作,以响应于检测到供应到控制器32的低压DC电力的损失,将均衡的扭矩施加到操作地耦合到驱动单元20的每个车轮16或18。
如图5A、图5C和图6A所示,在各种实施方案中,检测电路140使用光耦合器141来检测供应到控制器32的低压DC电力(12V)的损失。低压DC电力(诸如12V)被供应到电阻器R
在正常操作期间,控制信号143被供应到LED 147,并且LED 147发射光。光电晶体管149检测光并打开。因为光电晶体管149是下拉晶体管,所以当光电晶体管149接通时,启用信号151是低的。当启用信号151低时,启用信号151向下拉动备用电源电路84A和84B(诸如降压DC-DC转换器),使得备用电源电路84A和84B被断开并且防止施加三相短路。
在低压DC电力(12V)损失的情况下,信号143消失并且LED 147停止发射光。因此,光电晶体管149断开并且启用信号151为高。当启用信号151为高时,备用电源电路84A和84B接通并施加三相短路,如下所述。例如,启用信号151可以接通备用电源电路84A和84B中的每一者中的降压DC-DC转换器,以将高压DC电力转换成低压DC电力(12V)。
在各种实施方案中,栅极驱动电路46A和栅极驱动电路46B分别包括备用电源电路84A和84B。高压DC电力(诸如450V)被提供给备用电源电路84A和84B中的每一者。每个备用电源电路84A和84B被配置为将450VDC电力转换成低压DC电力,诸如12VDC电力。因此,如果需要,备用电源电路84A和84B适当地包括降压DC-DC转换器(如上所述)、分压器电路(如下所述)等。
如图6B所示,如果需要,在一些实施方案中,每个备用电源电路84A和84B可以任选地包括常开继电器152,该常开继电器具有操作地耦合以从控制器32接收低压DC电力(12V)的继电器线圈154。在此类实施方案中,常开继电器152还包括常开触点156。如上所述,在正常操作期间,将低压DC电力12V提供给继电器线圈154,并且继电器线圈154通电,从而使常开触点156打开)。在低压DC电力(12V)损失的情况下,继电器线圈154断电,从而使常开触点156关闭。因此,在此类实施方案中,检测电路140适当地包括继电器线圈154,并且来自控制器32的低压DC电力(12V)可以被认为是控制信号。
在此类实施方案中,每个备用电源电路84A和84B适当地包括操作地耦合以接收高压DC电力的分压器158。分压器158被配置为将高压DC电力转换成低压DC电力,并且被进一步配置为将低压DC电力输出到常开触点156。在此类实施方案中,在正常操作期间(当将低压DC电力提供给继电器线圈154并且常开触点156打开时),备用电源电路84A和84B不提供12V电力。相反,在低压DC电力(12V)损失的情况下(当继电器线圈154断电并且常开触点156关闭时),备用电源电路84A和84B提供12V电力。因此,在此类实施方案中,每个备用电源电路84A和84B也适当地包括常开触点156。
如上所述,在各种实施方案中,功率逆变器30A和功率逆变器30B各自包括三端功率半导体器件42的两个组40和44。如下所述,三相短路电路108被进一步配置为使功率逆变器30A和功率逆变器30B中的三端功率半导体器件42的一组40或44响应于检测到供应到控制器32的低压DC电力的损失而短路。
如图5A和图5C所示,无论如何检测到低压DC电力(12V)的损失以及低压DC电力(12V)如何由备用电源电路84A和84B产生,低压DC电力(12V)都从备用电源电路84A和84B供应到电压调节器116。响应于施加低压DC电力(12V),电压调节器116输出5VDC控制信号122。控制信号122被输入到缓冲器118和120。缓冲器118被耦合以将控制信号122提供给功率逆变器30A的组44的驱动器46A2。驱动器46A2生成并向功率逆变器30A的组44的栅极端子48提供故障动作信号88',从而使功率逆变器30A的组44的三端功率半导体器件42短路。缓冲器120被耦合以将控制信号122提供给功率逆变器30B的组44的驱动器46B2。驱动器46B2生成并向功率逆变器30B的组44的栅极端子48提供故障动作信号92',从而使功率逆变器30B的组44的三端功率半导体器件42短路。
应当理解,使逆变器30A和30B的组44的三端功率半导体器件42短路仅作为说明而非限制给出。在一些实施方案中,使逆变器30A和30B的组40的三端功率半导体器件42短路(并且使逆变器30A和30B的组44的三端功率半导体器件42保持开路)。
在各种实施方案中并且如图6C所示,提供了一种用于在供应到两个逆变器的公共控制器的12V损失的情况下对电动车辆的驱动单元的两个逆变器应用相同的故障动作的方法160。
方法160在框162处开始。在框164处,检测供应到用于电动车辆的驱动单元的第一功率逆变器的第一处理器和第二功率逆变器的第二处理器的控制器的低压直流(DC)电力的损失。在框166处,响应于检测到供应到控制器的低压DC电力的损失,将高压DC电力转换成低压DC电力。在框168处,对第一功率逆变器和第二功率逆变器应用相同的故障动作,以响应于检测到供应到控制器的低压DC电力的损失而将均衡的扭矩施加到操作地耦合到驱动单元的每个车轮。方法160在框170处停止。
在各种实施方案中,可以响应于供应到控制器的低压DC电力的存在而提供控制信号。
在各种实施方案中,对第一功率逆变器和第二功率逆变器应用相同的故障动作以响应于检测到供应到控制器的低压DC电力的损失将均衡的扭矩施加到操作地耦合到驱动单元的每个车轮可以包括对第一功率逆变器和第二功率逆变器应用相同的故障动作以响应于不存在控制信号将均衡的扭矩施加到操作地耦合到驱动单元的每个车轮。
在各种实施方案中,故障动作可以包括使第一功率逆变器和第二功率逆变器中的一组三端功率半导体器件短路。
本领域的技术人员将认识到,本文所述的设备和/或过程的至少一部分可集成到数据处理系统中。本领域的技术人员将认识到,数据处理系统通常包括以下中的一个或多个:系统单元壳体、视频显示设备、存储器(诸如易失性或非易失性存储器)、处理器(诸如微处理器或数字信号处理器)、计算实体(诸如操作系统)、驱动器、图形用户界面和应用程序、一个或多个交互设备(例如,触摸板、触摸屏、天线等)和/或包括反馈回路和控制马达(例如,用于感测位置和/或速度的反馈;用于移动和/或调节部件和/或量的控制马达)的控制系统。数据处理系统可利用合适的可商购获得的部件来实现,诸如通常存在于数据计算/通信和/或网络计算/通信系统中的那些部件。
如前面/后面的公开内容中所用,术语模块可以指以特定方式布置的一个或多个部件的集合、或一个或多个通用部件的集合,该一个或多个通用部件可被配置为在一个或多个特定时间点以特定方式操作和/或还被配置为在一个或多个另外时间以一种或多种另外的方式操作。例如,相同硬件或硬件的相同部分可以按顺序/并行时间被配置/重新配置为第一类型的模块(例如,在第一时间)、第二类型的模块(例如,在第二时间,第二时间在一些情况下可与第一时间重合、重叠、或在第一时间之后),和/或第三类型的模块(例如,在第三时间,第三时间在一些情况下可与第一时间和/或第二时间重合、重叠、或在第一时间和/或第二时间之后)等。可重新配置和/或可控部件(例如,通用处理器、数字信号处理器、现场可编程门阵列等)能够被配置为具有第一目的的第一模块,然后被配置为具有第二目的的第二模块,然后被配置为具有第三目的的第三模块等。可重新配置和/或可控部件的转变可在少至几纳秒内发生,或者可在数分钟、数小时或数天的时间段内发生。
在一些此类示例中,在部件被配置为执行第二目的时,部件可能不再能够执行该第一目的,直到其被重新配置。部件可在少至几纳秒内作为不同模块在配置之间切换。部件可动态地重新配置,例如,部件从第一模块重新配置到第二模块可恰好在需要第二模块时发生。部件可分阶段重新配置,例如,不再需要的第一模块的部分可重新配置到第二模块中,即使是在第一模块完成其操作之前。此类重新配置可自动发生,或者可通过外部源的提示发生,无论该源是另一部件、指令、信号、状况、外部刺激还是类似的。
例如,个人计算机的中央处理单元可在各种时间通过根据其指令配置其逻辑门而作为用于在屏幕上显示图形的模块、用于将数据写入存储介质的模块、用于接收用户输入的模块、以及用于乘以两个大素数的模块来操作。此类重新配置可能是肉眼不可见的,并且在一些实施方案中可包括对部件的各个部分(例如,开关、逻辑门、输入和/或输出)的激活、停用和/或重新路由。因此,在前面/后面的公开内容中存在的示例中,如果示例包括或叙述多个模块,则该示例包括相同硬件可以同时或在离散的时间或时序实现所叙述模块中的多于一个模块的可能性。无论是使用更多的部件、更少的部件还是数量与模块的数量相同的部件,多个模块的实现仅仅是实现选择,并且通常不影响模块本身的操作。因此,应当理解,本公开中对多个离散模块的任何叙述包括将这些模块实现为任何数量的底层部件,包括但不限于随时间推移重新配置其自身以执行多个模块的功能的单个部件和/或类似地重新配置的多个部件,和/或专用可重新配置的部件。
在一些情况下,一个或多个部件在本文中可被称为“被配置为”、“由...配置”、“可被配置为”、“可操作/操作为”、“适于/可适于”、“能够”、“可适形/适形于”等。本领域的技术人员将认识到,除非上下文另有要求,否则此类术语(例如“被配置为”)通常涵盖有源状态部件和/或无源状态部件和/或待机状态部件。
虽然已经示出和描述了本文所述的本主题的特定方面,但是对于本领域的技术人员将显而易见的是,基于本文的教导,在不脱离本文所述主题以及其更广泛的方面的情况下,可作出改变和修改,因此所附权利要求将所有此类改变和修改涵盖在其范围内、如在本文所述主题的真实精神和范围内。本领域的技术人员应当理解,一般来讲,本文所用的术语、尤其是在所附权利要求(例如,所附权利要求的主体)中所用的术语通常旨在表示“开放式”术语(例如,术语“包括”应解释为“包括但不限于”,术语“具有”应解释为“至少具有”,术语“包含”应解释为“包含但不限于”等)。本领域的技术人员应当进一步理解,如果类意图是特定数量的引入的权利要求叙述,则此类意图将在权利要求中明确叙述,并且在不存在此类叙述的情况下,不存在此类意图。例如,为了有助于理解,以下所附权利要求可包含使用引导短语“至少一个”和“一个或多个”来引入权利要求叙述。然而,此类短语的使用不应理解为暗示通过不定冠词“一个”或“一种”引入权利要求叙述将包含此类引入的权利要求叙述的任何特定权利要求限制为仅包含一个此类叙述的权利要求,即使当同一权利要求包括引导短语“一个或多个”或“至少一个”和不定冠词诸如“一个”或“一种”(例如,“一个”和/或“一种”通常应被解释为意指“至少一个”或“一个或多个”)时;这同样适用于使用用于引入权利要求叙述的定冠词。此外,即使明确叙述特定数量的引入的权利要求叙述,本领域的技术人员也将认识到,这种叙述通常应解释为意指至少所叙述的数量(例如,仅叙述“两个叙述”而不做其他修饰,通常意指至少两个叙述、或者两个或更多个叙述)。此外,在使用类似于“A、B和C等中的至少一者”的约定的那些情况下,一般来讲,此类构造所意图的含义是本领域的技术人员将理解该约定(例如,“具有A、B和C中的至少一者的系统”将包括但不限于具有单独的A、具有单独的B、具有单独的C、具有A和B、具有A和C、具有B和C和/或A、B和C等的系统)。本领域的技术人员将进一步理解,除非上下文另有规定,否则通常呈现两个或更多个另选术语(无论在说明书、权利要求书还是附图中)的析取词和/或短语应被理解为设想包括术语中的一个、术语中的任一个或两个术语的可能性。例如,短语“A或B”将通常被理解为包括“A”或“B”或“A和B”的可能性。
上述具体实施方式已经通过使用框图、流程图和/或示例阐述了设备和/或过程的各种实施方案。在此类框图、流程图和/或示例包含一个或多个功能和/或操作的情况下,本领域的技术人员将理解,可通过宽范围的限于35U.S.C.101下可专利的主题的硬件、软件(例如,用作硬件规范的高级计算机程序)、固件或几乎它们的任何组合单独地和/或共同地实现此类框图、流程图或示例内的每个功能和/或操作。在实施方案中,本文所述主题的若干部分可经由专用集成电路(ASIC)、现场可编程门阵列(FPGA)、数字信号处理器(DSP)或其他集成格式来实现。然而,本领域的技术人员将认识到,本文所公开的实施方案的一些方面整体或部分地可在集成电路中等效地实现为限于35U.S.C.101下可专利的主题的在一个或多个计算机上运行的一个或多个计算机程序(例如,在一个或多个计算机系统上运行的一个或多个程序)、在一个或多个处理器上运行的一个或多个程序(例如,在一个或多个微处理器上运行的一个或多个程序)、固件或它们的几乎任何组合,并且根据本公开,设计电路和/或写入软件(例如,用作硬件规范的高级计算机程序)和/或固件的代码将完全在本领域技术人员的技术范围内。此外,本领域的技术人员将理解,本文所述主题的机制能够以多种形式作为程序产品分发,并且本文所述主题的例示性实施方案适用,而不管用于实际进行分发的信号承载介质的具体类型如何。信号承载介质的示例包括但不限于以下项:可记录型介质,诸如软盘、硬盘驱动器、光盘(CD)、数字视频盘(DVD)、数字带、计算机存储器等;以及传输型介质,诸如数字和/或模拟通信介质(例如,光纤电缆、波导、有线通信链路、无线通信链路(例如,发射器、接收器、传输逻辑、接收逻辑等)等)。
相对于所附权利要求,本领域的技术人员将理解,其中所列举的操作通常可按任何次序执行。另外,尽管各种操作流程按序列呈现,但应当理解,各种操作可按除所示次序之外的其他次序执行或者可同时执行。除非上下文另有规定,否则此类替代排序的示例可包括重叠、交错、中断、重新排序、递增、预备、补充、同时、反向或其他变体排序。此外,除非上下文另有规定,否则术语如“响应于”、“与...相关”或其他过去时形容词通常并非旨在排除此类变体。
虽然已经根据例示性实施方案描述了本发明所公开的主题,但是本领域技术人员应当理解,在不脱离权利要求书中所阐述的要求保护的主题的范围的情况下,可对该主题进行各种修改。
- 一种模块化多电平脉宽调制的同步系统和同步方法
- 基于时钟抖动消除的高精度变电站时钟同步装置
- 带同步时钟的脉宽调制式光纤通信编码解码方法及电路
- 带同步时钟的脉宽调制式光纤通信编码/解码方法及电路