具有双铰链结构的微机电系统器件
文献发布时间:2023-06-19 13:48:08
相关申请的交叉引用
本申请要求于2020年6月18日提交的标题为“MEMS DEVICE WITH A DUAL HINGESTRUCTURE TO RESIST UNWANTED MEMS DEVICE MOVEMENT”的美国临时专利申请号63/040,646的优先权,其内容通过引用整体结合于此。
技术领域
本公开涉及一种微机电系统(MEMS)器件,其包括第一组铰链和第二组铰链以使MEMS器件的反射镜结构围绕轴线(axis)倾斜;以及涉及一种MEMS器件,其包括第一组铰链和第二组铰链以使MEMS器件的反射镜结构围绕轴线倾斜并抵抗反射镜结构上的不需要的横向线性力和/或不需要的平面内扭矩。
背景技术
MEMS器件是一种微型机械结构,其可以包括用于反射光的反射镜。当MEMS器件被致动时,反射镜可以围绕轴线倾斜,这可以导致落在反射镜上并在一个方向上反射的光束落在反射镜上并在不同的方向上反射。
发明内容
在一些实施方式中,微机电系统器件包括第一层,其包括一组定子梳状致动器;第二层,其包括一组转子梳状致动器和第一组铰链;以及包括第二组铰链的第三层,其中:第二层与第一层相邻,第三层与第二层相邻,第一组铰链和第二组铰链被配置为围绕微机电系统器件的第一轴线倾斜反射镜结构,其中经由第一组铰链和第二组铰链使反射镜结构围绕微机电系统器件的第一轴线倾斜的驱动扭矩由该一组定子梳状致动器中的一定子梳状致动器与该一组转子梳状致动器中的一转子梳状致动器接合引起,第一组铰链被配置为抵抗由定子梳状致动器与转子梳状致动器接合引起的在与第一轴线相关联的方向上在反射镜结构上的横向线性力,第二组铰链被配置为抵抗由定子梳状致动器与转子梳状致动器接合引起的在反射镜结构上围绕微机电系统器件的第二轴线的平面内扭矩。
在一些实施方式中,微机电系统器件包括第一层,其包括一组定子梳状致动器;以及第二层,其包括一组转子梳状致动器、第一组铰链和第二组铰链,其中:第二层与第一层相邻,第一组铰链和第二组铰链被配置为基于由该一组定子梳状致动器中的一定子梳状致动器与该一组转子梳状致动器中的一转子梳状致动器接合引起的驱动扭矩,使反射镜围绕微机电系统器件的第一轴线倾斜,第一组铰链被配置为抵抗由定子梳状致动器与转子梳状致动器接合引起的在与第一轴线相关联的方向上在所述反射镜结构上的横向线性力,并且第二组铰链被配置为抵抗由定子梳状致动器与转子梳状致动器接合引起的围绕所述微机电系统器件的第二轴线在所述反射镜结构上的平面内扭矩。
在一些实施方式中,微机电系统器件包括第一层,其包括定子梳状致动器;第二层,其包括转子梳状致动器;包括反射镜的反射镜结构;以及第一组铰链和第二组铰链,该第一组铰链和第二组铰链被配置为基于由定子梳状致动器与转子梳状致动器接合引起的驱动扭矩,使反射镜结构围绕微机电系统器件的第一轴线倾斜,其中:第一组铰链被配置为抵抗由定子梳状致动器与转子梳状致动器接合引起的在与第一轴线相关联的方向上在反射镜结构上的横向线性力,并且第二组铰链被配置为抵抗由定子梳状致动器与转子梳状致动器接合引起的围绕微机电系统器件的第二轴线在反射镜结构上的平面内扭矩。
附图说明
图1是曲线图100的示意图,其示出了由本文所述的传统微机电系统器件产生的横向线性力和由传统微机电系统器件产生的驱动力之间的关系;
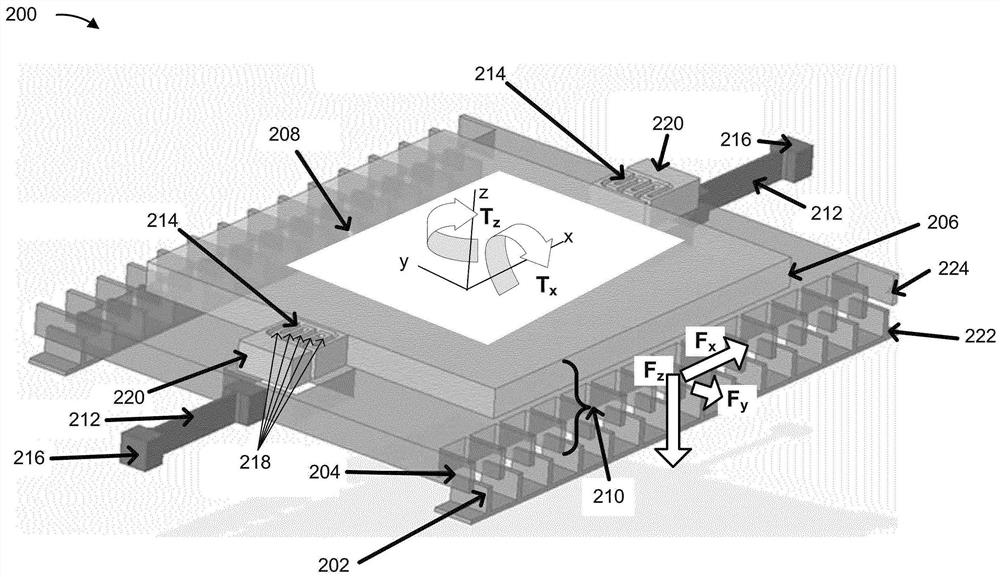
图2是本文描述的第一示例MEMS器件的示意图;
图3是本文描述的第二示例MEMS器件的示意图。
具体实施方式
示例实施方式的以下详细描述参考了附图。不同附图中相同的附图标记可以标识相同或相似的元件。
光检测和测距(LIDAR)系统通过用光束(例如,激光束)照射对象并测量反射光束的特性来检测对象。诸如半自主或全自主车辆的车辆可以使用LIDAR系统来检测车辆路径中的对象(例如,其他车辆、行人、道路碎片等)。典型的LIDAR系统包括偏转投射光束和反射光束的光束偏转单元。然而,光束偏转单元原地旋转,因此受到机械磨损(例如,来自摩擦、磨蚀和/或类似情况)。因此,对于许多应用,例如自主车辆应用,需要更鲁棒的固态LIDAR系统。
在某些情况下,固态LIDAR系统可以使用一个或多个微机电系统器件来偏转投射光束和反射光束。为了使这样的LIDAR系统提供长距离和宽视场,LIDAR系统的微机电系统器件应该包括能够提供宽偏转角度的大反射镜。此外,微机电系统器件需要具有高谐振频率,以抵抗操作振动(例如,由包括LIDAR系统的车辆操作产生的振动)。例如,车辆可能受到由在道路上行驶的车辆、气流等产生的振动的影响,该振动传播到包括在车辆中的LIDAR系统的微机电系统器件。
在许多情况下,微机电系统器件使用多层梳状致动器结构(例如,包括定子梳状致动器和转子梳状致动器)来提供驱动扭矩,以围绕轴线在微机电系统器件的铰链上倾斜反射镜。为了在微机电系统器件受到操作振动时提供足够的驱动扭矩来倾斜反射镜和/或保持反射镜的偏转角,定子梳状致动器的齿和转子梳状致动器的齿之间的间隙可以在梳状致动器结构上减小。然而,由于与制造定子梳状致动器和转子梳状致动器相关的固有复杂性,定子梳状致动器的齿和转子梳状致动器的齿之间的间隙在梳状致动器结构上可能不均匀和/或不对准。这可能在与轴线相关联的方向上在反射镜上产生不希望的横向线性力和/或围绕附加轴线在反射镜上产生不希望的平面内扭矩。这降低了反射镜将倾斜和/或保持偏转角的可能性,这抑制了微机电系统器件和/或固态LIDAR系统的功能。此外,铰链可以具有不与反射镜的质心对准(align)的枢轴点,这可以允许操作振动产生竞争性的横向线性力和/或扭矩,这导致反射镜倾斜远离优选的偏转角,并且进一步抑制微机电系统器件和/或固态LIDAR系统的功能。
本文所述的一些实施方式提供了一种具有多层梳状致动器结构的微机电系统器件,以提供驱动扭矩来使反射镜结构围绕微机电系统器件的第一轴线倾斜。该微机电系统器件可以包括第一组铰链(例如扭转铰链,例如杆(bar)铰链)和第二组铰链(例如扭转(twisting)铰链,例如蛇形铰链),其被配置为当驱动扭矩由梳状致动器结构提供时,使反射镜结构围绕第一轴线倾斜。第一组铰链可以被配置为抵抗由提供驱动扭矩的梳状致动器结构(例如,由于梳状致动器结构的齿的未对准)在与第一轴线相关联的方向上在反射镜结构上的不希望的横向线性力。第二组铰链可以被配置为抵抗由提供驱动扭矩的梳状致动器结构(例如,由于梳状致动器结构的齿的未对准)产生的围绕微机电系统器件的第二轴线的反射镜结构上的平面内扭矩。这增加了反射镜结构将倾斜和/或保持优选偏转角的可能性,即使当梳状致动器结构的齿未对准时也是如此。
此外,在一些实施方式中,第一组铰链和第二组铰链可以被设计成具有与反射镜结构的质心对准的枢轴中心。这减少或消除了振动引起的横向线性力和/或扭矩,该力和/或扭矩可能影响反射镜结构的优选偏转角。因此,本文描述的一些实施方式提供了比传统微机电系统器件更能抵抗操作振动的微机电系统器件,这有助于微机电系统器件和/或包括该微机电系统器件的固态LIDAR系统的更鲁棒的功能。
图1是曲线图100的示意图,其示出了由传统微机电系统器件产生的横向线性力和由传统微机电系统器件产生的驱动力之间的关系。传统的微机电系统器件包括多层梳状致动器结构,其产生驱动力以使传统微机电系统器件的一组铰链上的反射镜围绕微机电系统器件的轴线倾斜。此外,由于梳状致动器结构的齿未对准,多层梳状致动器在轴线方向上产生横向线性力。如图1所示,当与5微米间隙相关联的梳状致动器结构的齿之间存在0.5微米(μm)的未对准时,横向线性力与驱动力的比率随着反射镜的倾斜角(例如,具有70微米厚度)的增加而增加。因此,当反射镜的倾斜角超过阈值角度时,横向线性力可能导致反射镜在不希望的方向(例如,在轴线的方向)上移动,这可能对反射镜和/或传统微机电系统器件的性能产生负面影响。
如上所述,图1仅作为一个或多个示例提供。其他示例可以不同于关于图1所描述的。
图2是本文描述的示例性微机电系统器件200的示意图。微机电系统器件200可以是被配置成偏转光束的微型光学器件。如图2所示,微机电系统器件200可以包括第一层202、第二层204和/或第三层206。第一层202可以包括微机电系统器件200的衬底。在一些实施方式中,第二层204和/或第三层206可以与第一层202相邻(例如,在衬底上分层形成、在衬底上分层生长、在衬底上分层沉积等)。第一层202、第二层204和/或第三层206可以是硅基层(例如,具有相等的厚度,例如70微米)。
第三层206可以包括反射镜208。反射镜208可以形成第三层206的一些或全部(例如,第三层206可以被成形、蚀刻、形成和/或类似的方式来产生反射镜208)。反射镜208可以涂有用于反射光束的反射涂层(例如,金属反射材料,例如金)。
在一些实施方式中,反射镜结构210可以由多层组成,例如第二层204、第三层206和/或反射镜208(例如,反射镜结构210可以包括第二层204、第三层206和/或反射镜208中的一些或全部)。例如,反射镜结构210可以包括反射镜208;如本文所述,不包括第一组铰链212的第一层202的一个或多个部分;和/或不包括第二组铰链214的第二层204的一个或多个部分,如本文所述。
反射镜结构210可以经由微机电系统器件200的第一组铰链212(例如,包括两个或更多第一类型的铰链)和/或第二组铰链214(例如,包括两个或更多第二类型的铰链)悬挂(在第一层202上)。第一组铰链212和/或第二组铰链214(例如,独立地和/或组合地)可以被配置成围绕微机电系统器件200的第一轴线(例如,图2所示的x轴)倾斜反射镜结构210(或允许反射镜结构210倾斜)。例如,第一组铰链212和/或第二组铰链214可以沿着微机电系统器件200的第一轴线对准,以允许反射镜结构210围绕第一轴线倾斜。
在一些实施方式中,第一组铰链212可以被包括作为第二层204的一部分。在一些实施方式中,第一组铰链212可以经由一个或多个相应的锚定件216安装到第一层202。一个或多个锚定件216中的每个锚定件216可以被包括作为第二层204的一部分。一个或多个锚定件216可以被配置成当反射镜结构210在第一组铰链212上围绕第一轴线(例如,围绕图2所示的x轴)倾斜时稳定反射镜结构210。
在一些实施方式中,第二组铰链214可以被包括作为第三层206的一部分。在一些实施方式中,第二组铰链214可以经由一个或多个相应的锚定件220安装到第一层202。一个或多个锚定件220中的每个锚定件220可以被包括作为第二层204和/或第三层206的一部分。一个或多个锚定件220可以被配置成当反射镜结构210在第二组铰链214上围绕第一轴线(例如,围绕图2所示的x轴)倾斜时稳定反射镜结构210。
在一些实施方式中,微机电系统器件200可以包括一个或多个梳状致动器结构(例如,如图2所示,在微机电系统器件200的正y方向和负y方向的每一侧上的梳状致动器结构)。梳状致动器结构可以被配置成产生静电扭矩(也称为驱动扭矩),以在第一组铰链212和/或第二组铰链214上围绕微机电系统器件200的第一轴线(例如,围绕图2所示的x轴)倾斜反射镜结构210。此外,梳状致动器结构可以包括一个或多个梳状致动器,例如定子梳状致动器和/或转子梳状致动器。例如,梳状致动器结构可以包括定子梳状致动器222和/或转子梳状致动器224。在一些实施方式中,定子梳状致动器222可以形成第一层202的一部分,和/或转子梳状致动器224可以形成第二层204的一部分。
在一些实施方式中,一个或多个梳状致动器中的每一个可以包括用于与另一个梳状致动器的多个齿接合的多个齿。例如,定子梳状致动器222可以包括多个齿,以与转子梳状致动器224的多个齿接合。当电压施加到定子梳状致动器222时,转子梳状致动器224和定子梳状致动器222之间的电压差产生静电场,该静电场导致(例如,拉动)转子梳状致动器224的多个齿与定子梳状致动器222的多个齿接合。静电场可在与第二轴线(例如,图2中所示的z轴)相关联的方向上产生线性静电力和/或静电扭矩(例如,在图2中示出为T
在一些实施方式中,由于转子梳状致动器224的多个齿和定子梳状致动器222的多个齿之间的一个或多个未对准,静电场也可能在与第一轴线(例如,x轴)相关联的方向上在反射镜结构210上产生不希望的线性静电力(例如,在图2中示出为F
附加地或替代地,由于转子梳状致动器224的多个齿和定子梳状致动器222的多个齿之间的一个或多个未对准,静电场也可能在与第三轴线(例如,y轴)相关联的方向上在反射镜结构210上产生不希望的线性静电力(例如,在图2中示出为F
例如,如图2所示,第二组铰链214中的铰链214可以是包括多个杆218的蛇形铰链(例如,折叠铰链,其中多个杆218沿着微机电系统器件200的第三轴线并排布置,例如图2所示的y轴)。当每个杆218的长度满足(例如,小于)第二杆长度(例如,与特定量的刚度、刚性等相关联)阈值和/或多个杆218的长度之和满足(例如,大于或等于)第三杆长度阈值(例如,与特定量的刚度、刚性等相关联)时,蛇形铰链被构造成抵抗与第三轴线相关的方向上在反射镜结构上的第二横向线性力和/或围绕第二轴线在反射镜结构210上的平面内扭矩。例如,第二横向线性力可以作为蛇形铰链的多个杆218上的压缩力,由于多个杆218的短长度(例如,因为在第二横向线性力下的弯曲变形与杆长度的立方成反比),第二横向线性力可以被配置为防止第二横向线性力在与微机电系统器件200的第三轴线相关联的方向上移动反射镜结构210超过阈值量。作为另一个示例,平面内扭矩可以作为蛇形铰链的多个杆218上的弯曲力,由于多个杆218的短长度,其可以被配置为防止平面内扭矩使反射镜结构210围绕微机电系统器件200的第二轴线倾斜超过阈值量。
在一些实施方式中,第一组铰链212和第二组铰链214的枢轴中心(例如,代表性枢转点)可以与反射镜结构210的质心对准。在一些实施方式中,枢轴中心可以是与第一组铰链212和第二组铰链214相关联的相应横向刚度的函数。例如,枢轴中心可以基于与第一组铰链212相关联的横向刚度和与第二组铰链214相关联的横向刚度的比率。可以调整该比率以使枢轴中心移动(例如,沿着图2所示的z轴),使得枢轴中心位于反射镜结构210的质量中心。这样,反射镜结构210的质心可以与第一组铰链212和第二组铰链214的枢轴中心对准,这可以增加反射镜结构210、第一组铰链212和/或第二组铰链214的操作振动阻力。因此,反射镜结构210可以抵抗由操作振动引起的线性惯性力,从而防止或减少诱发的倾斜扭矩。
如上所述,图2仅作为一个或多个示例提供。其他示例可以不同于关于图2所描述的。
图3是本文描述的示例性微机电系统器件300的示意图。微机电系统器件300可以是被配置成偏转光束的微型光学器件。如图3所示,微机电系统器件300可以包括第一层302和/或第二层304。第一层302可以包括微机电系统器件300的衬底。在一些实施方式中,第二层304可以与第一层302相邻(例如,在衬底上的层中形成、在衬底上的层中生长、在衬底上的层中沉积等)。第一层302和/或第二层304可以是硅基层(例如,具有相等的厚度,例如70微米)。
第二层304可以包括反射镜308。反射镜308可以形成第二层304的一些或全部(例如,第二层304可以被成形、蚀刻、形成等以产生反射镜308),或者可以是第二层304顶部的单独层。反射镜308可以涂有用于反射光束的反射涂层(例如,金属反射材料,例如金)。
在一些实施方式中,反射镜结构310可以由多层组成,例如第二层304和/或反射镜308(例如,反射镜结构310可以包括第二层304和/或反射镜308中的一些或全部)。例如,反射镜结构310可以包括反射镜308;如本文所述,不包括第一组铰链312的第一层302的一个或多个部分;和/或不包括第二组铰链314的第二层304的一个或多个部分,如本文所述。
反射镜结构310可以经由微机电系统器件300的第一组铰链312(例如,包括两个或更多第一类型的铰链)和/或第二组铰链314(例如,包括两个或更多第二类型的铰链)悬挂(在第一层302上)。第一组铰链312和/或第二组铰链314(例如,独立地和/或组合地)可以被配置成围绕微机电系统器件300的第一轴线(例如,图3所示的x轴)倾斜反射镜结构310(或允许反射镜结构310倾斜)。例如,第一组铰链312和/或第二组铰链314可以沿着微机电系统器件300的第一轴线对准,以允许反射镜结构310围绕第一轴线倾斜。
在一些实施方式中,第一组铰链312和/或第二组铰链314可以被包括作为第二层304的一部分。在一些实施方式中,第一组铰链312和/或第二组铰链314可以经由一个或多个相应的锚定件316安装到第一层302。一个或多个锚定件316中的每个锚定件316可以被包括作为第二层304的一部分。一个或多个锚定件316可以被配置成当反射镜结构310围绕第一轴线(例如,围绕图3所示的x轴)在第一组铰链312和/或第二组铰链314上倾斜时稳定反射镜结构310。
在一些实施方式中,微机电系统器件300可以包括一个或多个梳状致动器结构(例如,如图3所示,在微机电系统器件300的正y方向和负y方向的每一侧上的梳状致动器结构)。梳状致动器结构可以被配置成产生静电扭矩(也称为驱动扭矩),以在第一组铰链312和/或第二组铰链314上围绕微机电系统器件300的第一轴线(例如,围绕图3所示的x轴)倾斜反射镜结构310。此外,梳状致动器结构可以包括一个或多个梳状致动器,例如定子梳状致动器和/或转子梳状致动器。例如,梳状致动器结构可以包括定子梳状致动器322和/或转子梳状致动器324。在一些实施方式中,定子梳状致动器322可以形成第一层302的一部分,和/或转子梳状致动器324可以形成第二层304的一部分。
在一些实施方式中,一个或多个梳状致动器中的每一个可以包括用于与另一个梳状致动器的多个齿接合的多个齿。例如,定子梳状致动器322可以包括多个齿,以与转子梳状致动器324的多个齿接合。当电压施加到定子梳状致动器322时,转子梳状致动器324和定子梳状致动器322之间的电压差产生静电场,该静电场导致(例如,拉动)转子梳状致动器324的多个齿与定子梳状致动器322的多个齿接合。静电场可在与第二轴线(例如,图3中所示的z轴)相关联的方向上产生线性静电力(例如,图3中示出为F
在一些实施方式中,由于转子梳状致动器324的多个齿和定子梳状致动器322的多个齿之间的一个或多个未对准,静电场也可以在与第一轴线(例如,x轴)相关联的方向上在反射镜结构310上产生不希望的线性静电力(例如,在图3中示出为F
附加地或替代地,由于转子梳状致动器324的多个齿和定子梳状致动器322的多个齿之间的一个或多个未对准,静电场也可以在与第三轴线(例如,y轴)相关联的方向上在反射镜结构310上产生不希望的线性静电力(例如,在图3中显示为Fy)(以下称为“第二横向线性力”)和/或关于第二轴线(例如,关于图3所示的z-轴)在反射镜结构310上的不希望的静电扭矩(例如,在图3中示出为Tz)(以下称为“平面内扭矩”)。在一些实施方式中,第二组铰链314可以包括扭转铰链(例如,两个或更多个扭转铰链),该扭转铰链被配置为抵抗反射镜结构310上的第二横向线性力和/或平面内扭矩。
例如,如图3所示,第二组铰链314中的铰链314可以是包括多个杆318的蛇形铰链(例如,折叠铰链,其中多个杆318沿着微机电系统器件300的第三轴线(例如图3所示的y轴)并排布置)。当每个杆318的长度满足(例如,小于)第二杆长度阈值(例如,与特定量的刚度、刚性等相关联)和/或多个杆318的长度之和满足(例如,大于或等于)第三杆长度阈值(例如,与特定量的刚度、刚性等相关联)时,蛇形铰链被构造成抵抗与第三轴线相关的方向上在反射镜结构上的第二横向线性力和/或围绕第二轴线在反射镜结构310上的平面内扭矩。例如,第二横向线性力可以作为蛇形铰链的多个杆318上的压缩力,由于多个杆318的短长度(例如,因为在第二横向线性力下的弯曲变形与杆长度的立方成反比),该压缩力可以被配置为防止在与微机电系统器件300的第三轴线相关联的方向上移动反射镜结构310超过阈值量。作为另一个示例,平面内扭矩可以作为蛇形铰链的多个杆318上的弯曲力,由于多个杆318的短长度,其可以被配置为防止平面内扭矩使反射镜结构310围绕微机电系统器件300的第二轴线倾斜超过阈值量。
在一些实施方式中,第一组铰链312和第二组铰链314的枢轴中心(例如,代表性枢转点)可以与反射镜结构310的质心对准。在一些实施方式中,第一组铰链312和第二组铰链314的相应枢轴点可以被定位成彼此对准并且与反射镜结构310的质心对准。这样,反射镜结构310的质心可以与第一组铰链312和第二组铰链314的枢轴中心对准,这可以增加反射镜结构310、第一组铰链312和/或第二组铰链314的操作振动阻力。因此,反射镜结构310可以抵抗由操作振动引起的线性惯性力,从而防止或减少诱发的倾斜扭矩。
如上所述,图3仅作为一个或多个示例提供。其他示例可以不同于关于图3所描述的。
前述公开内容提供了说明和描述,但不旨在穷举或将实施方式限制到所公开的精确形式。可以根据上述公开内容进行修改和变化,或者可以从实施方式的实践中获得修改和变化。此外,这里描述的任何实施方式可以被组合,除非前述公开明确地提供了一个或多个实施方式可以不被组合的理由。
如这里所使用的,根据上下文,满足阈值可以指大于阈值、大于或等于阈值、小于阈值、小于或等于阈值、等于阈值等的值,这取决于上下文。
即使特征的特定组合在本申请中被公开,这些组合并不旨在限制各种实施方式的公开。事实上,这些特征中的许多可以以本申请中没有公开的方式进行组合。尽管下面列出的每个实施方式可以直接依赖于仅一个实施方式,但是各种实施方式的公开包括每个从实施方式与多个实施方式中的每个其他实施方式的组合。
除非明确说明,否则这里使用的元件、动作或指令不应被解释为关键或必要的。此外,如本文所用,冠词“一”和“一个”旨在包括一个或多个项目,并且可以与“一个或多个”互换使用。此外,如本文所用,冠词“该”旨在包括与冠词“该”相关联的一个或多个项目,并且可以与“该一个或多个”互换使用。此外,如此处所使用的,术语“组”旨在包括一个或多个项目(例如,相关项目、不相关项目、相关和不相关项目的组合等),并且可以与“一个或多个”互换使用。在只打算一个项目的地方,使用短语“仅一个”或类似的语言。此外,如这里所使用的,术语“具有(has)”、“具有(have)”、“具有(having)”等意在是开放式术语。此外,短语“基于”旨在表示“至少部分基于”,除非另有明确说明。此外,如本文所用,术语“或”在串联使用时旨在包括在内,并且可以与“和/或”互换使用,除非另有明确说明(例如,如果与“任一”或“仅其中之一”结合使用)。此外,为了便于描述,这里可以使用空间上相对的术语,例如“下方”、“下面”、“上方”、“上面”等,来描述一个元件或特征与图中所示的另一个元件或特征的关系。除了附图中描述的取向之外,空间相对术语旨在包括使用或操作中的设备、器件和/或元件的不同取向。该设备可以以其他方式取向(旋转90度或在其他取向),并且这里使用的空间相对描述符同样可以相应地解释。