一种真空回收式爬壁除锈机器人
文献发布时间:2023-06-19 13:46:35
技术领域
本发明涉及钢铁表面清理技术领域,具体为一种真空回收式爬壁除锈机器人。
背景技术
在核能、船舶、化工、风电等行业,广泛存在大型的钢铁壁面,这些钢铁壁面经过长期的风吹日晒、盐碱侵蚀、灰尘黏附,表面会出现污垢、锈蚀以及掉色。因此在除锈、清洗以及检修维护工作中,通常需要人工作业时,而人工作业时,通常需要一人或多人配合,但这样不但工作效率低、企业成本高,同时对于作业人员来说,劳动环境恶劣危险,而爬壁机器人可以替代人工完成上述危险作业,工作效率高、相较人工作业,企业成本明显降低,因此爬壁除锈机器人越来越受到人们的关注,而现有的爬壁机器人在钢铁表面进行除锈工作时,常因钢铁表面凹凸不一受到固定限制,且无法于钢铁表面进行复杂的移动,极大程度的降低了对钢铁表面的除锈效率,且在除锈后,并无专门的回收机构对废水废锈进行同一回收,固极大概率会在雨天发生反锈现象。
发明内容
鉴于现有技术中所存在的问题,本发明公开了一种真空回收式爬壁除锈机器人,采用的技术方案是,包括安装框,所述安装框的下表面设有毛刷盘,所述毛刷盘的上表面设有固定单元,所述毛刷盘通过固定单元与安装框配合固定安装,所述安装框的上表面中部设有清洗盘支撑架,所述清洗盘支撑架的上表面设有清洗盘,所述清洗盘穿过安装框的上表面延伸至安装框的下方固定连接有清洗喷头,所述清洗盘支撑架的侧面设有固定杆,所述固定杆的两端均配合插接安装有防护盒,所述防护盒的前端设有安装盒,所述安装盒的下表面设有侧部永磁块,所述防护盒内设有电机,所述安装盒内设有减速器,所述减速器的输入轴与电机的输出轴固定连接,所述减速器的两个输出轴均配合传动安装有传动轴,所述传动轴的另一端均设有移动轮,所述安装框的上表面对称开设有回收孔,所述安装框的上表面设有回收管,所述回收管为“Y”形管,所述回收管的底部两端分别与两个回收孔配合连通安装,所述安装框的上表面后端设有尾板,所述尾板的下表面中部设有尾部永磁块,所述安装框的上方设有保护架,所述保护架为“U”形杆,所述保护架的两端分别与两个防护盒的外侧面固定连接,所述尾板的上表面设有电控单元。
作为本发明的一种优选技术方案,所述固定单元包括短螺栓、固定板和长螺栓,所述固定板均匀设于安装框的上表面外端,所述短螺栓均匀设于固定板的上表面内端,所述短螺栓与安装框上表面的螺孔配合螺纹安装,所述长螺栓设于固定板的上表面外端,所述长螺栓与毛刷盘上表面的螺孔配合螺纹安装,通过短螺栓可将固定板快速的固定于安装框的上表面,通过长螺栓可将固定板与毛刷盘进行快速的固定安装。
作为本发明的一种优选技术方案,还包括缓冲弹簧,所述缓冲弹簧固定套接于长螺栓的外侧面,所述缓冲弹簧的两端分别于固定板的下表面和毛刷盘的上表面固定连接,通过缓冲弹簧可对长螺栓进行安装防护,从而可使毛刷盘在使用时能够对不同的钢铁表面进行适应。
作为本发明的一种优选技术方案,还包括固定螺栓,所述固定螺栓均匀设于毛刷盘的外侧面,通过固定螺栓可使毛刷盘的固定安装更为稳定。
作为本发明的一种优选技术方案,还包括锁紧环,所述锁紧环共两个,所述锁紧环设于固定杆与防护盒的配合插接安装处,通过锁紧环可使固定杆与防护盒之间的配合插接安装更为稳固。
作为本发明的一种优选技术方案,还包括从动轮,所述从动轮对称设于尾板的下表面两端,通过从动轮可对本真空回收式爬壁除锈机器人通过移动单元的移动过程进行辅助。
作为本发明的一种优选技术方案,还包括接线盒,所述接线盒设于安装框的上表面后端,所述接线盒的上表面设有固定架,通过接线盒可将本真空回收式爬壁除锈机器人内的各种线缆进行收纳。
作为本发明的一种优选技术方案,还包括安装夹,所述安装夹共四个,所述安装夹均匀设于回收管的外侧面,其中两个安装夹与安装框的上表面配合固定安装,另外两个安装夹与接线盒上表面设置的固定架配合固定安装,通过安装夹可快速的对回收管进行固定安装,从而使回收管的工作过程中更为稳定。
本发明的有益效果:本发明通过侧部永磁块和尾部永磁块可使本真空回收式爬壁除锈机器人通过永磁吸附能够吸附于钢铁表面,通过移动单元可使机器人能够进行前进、后退、转向等动作,通过回收管和回收孔可将废水废锈进行统一回收,可做到100%回收,并且在非雨天可不反锈,通过清洗盘可使本真空回收式爬壁除锈机器人具有极强的清洗能力,且还可对清洗盘进行定制和互换,固定单元可使毛刷盘快速的与安装框进行固定安装,从而使本真空回收式爬壁除锈机器人能够适用于不同的钢铁表面,进而完成对不同钢铁表面的除锈除漆工作。
附图说明
图1为本发明结构示意图;
图2为本发明后侧面结构示意图;
图3为本发明横剖面结构示意图;
图4为本发明纵剖面结构示意图。
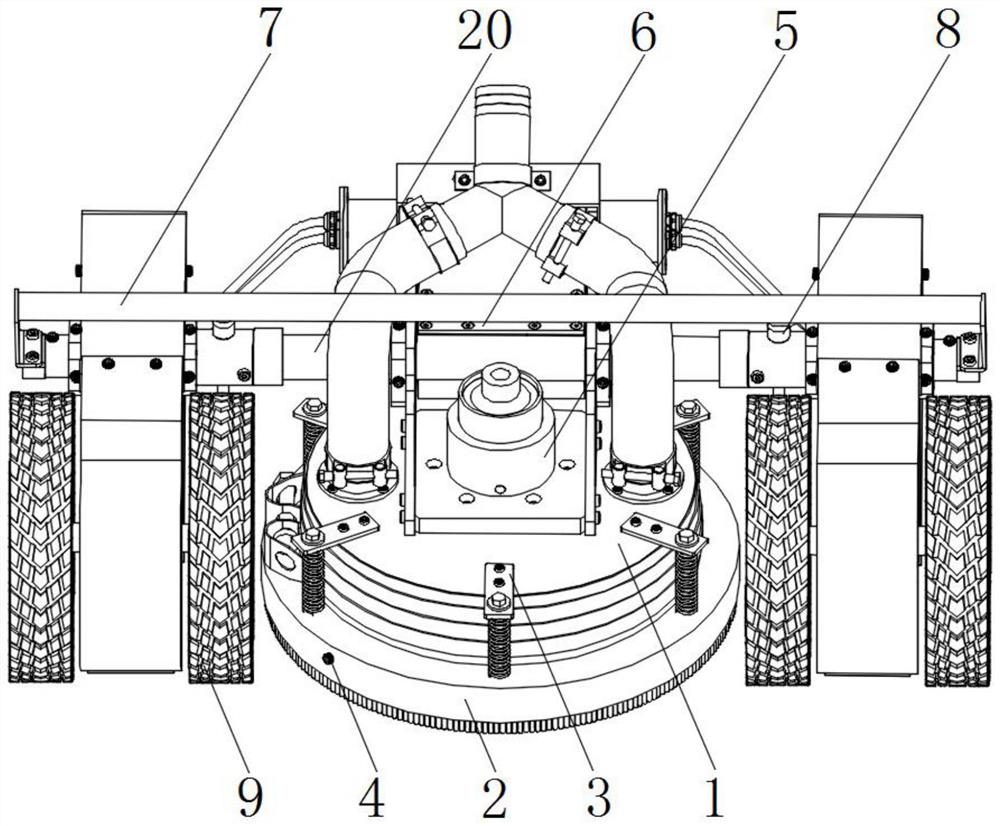
图中:1安装框、2毛刷盘、3固定单元、31短螺栓、32固定板、33 长螺栓、34缓冲弹簧、4固定螺栓、5清洗盘、6清洗盘支撑架、7保护架、8 锁紧环、9移动单元、91安装盒、92电机、93减速器、94传动轴、95移动轮、10回收管、11回收孔、12清洗喷头、13侧部永磁块、14尾板、15从动轮、16尾部永磁块、17防护盒、18安装夹、19接线盒、20固定杆。
具体实施方式
实施例1
如图1至图4所示,本发明公开了一种真空回收式爬壁除锈机器人,采用的技术方案是,包括安装框1,安装框1的下表面设有毛刷盘2,毛刷盘2 的上表面设有固定单元3,毛刷盘2通过固定单元3与安装框1配合固定安装,安装框1的上表面中部设有清洗盘支撑架6,清洗盘支撑架6的上表面设有清洗盘5,清洗盘5穿过安装框1的上表面延伸至安装框1的下方固定连接有清洗喷头12,清洗盘支撑架6的侧面设有固定杆20,固定杆20的两端均配合插接安装有防护盒17,防护盒17的前端设有安装盒91,安装盒91的下表面设有侧部永磁块13,防护盒17内设有电机92,安装盒91内设有减速器 93,减速器93的输入轴与电机92的输出轴固定连接,减速器93的两个输出轴均配合传动安装有传动轴94,传动轴94的另一端均设有移动轮95,安装框 1的上表面对称开设有回收孔11,安装框1的上表面设有回收管10,回收管 10为“Y”形管,回收管10的底部两端分别与两个回收孔11配合连通安装,安装框1的上表面后端设有尾板14,尾板14的下表面中部设有尾部永磁块 16,安装框1的上方设有保护架7,保护架7为“U”形杆,保护架7的两端分别与两个防护盒17的外侧面固定连接,尾板14的上表面设有电控单元,通过电控装置内的PLC板控制编程对工作线路进行规划,然后将侧部永磁块13和尾部永磁块16可将本真空回收式爬壁除锈机器人快速的吸附于钢铁表面,然后通过电机92使减速器93工作,使减速器93带动传动轴94进行转动,进而使移动轮95带动本真空回收式爬壁除锈机器人进行前进后退转向等移动动作,同时,通过清洗盘5带动清洗喷头12对钢铁表面进行清理,然后通过毛刷盘2对钢铁表面进行清理,由此可完成对钢铁表面的除锈除漆工作,然后通过回收孔11和回收管10可完成对废水废锈的回收。
作为本发明的一种优选技术方案,固定单元3包括短螺栓31、固定板 32和长螺栓33,固定板32均匀设于安装框1的上表面外端,短螺栓31均匀设于固定板32的上表面内端,短螺栓31与安装框1上表面的螺孔配合螺纹安装,长螺栓33设于固定板32的上表面外端,长螺栓33与毛刷盘2上表面的螺孔配合螺纹安装,通过短螺栓31可将固定板32快速的固定于安装框1的上表面,通过长螺栓33可将固定板32与毛刷盘2进行快速的固定安装,从而使本真空回收式爬壁除锈机器人内毛刷盘2的固定安装更为便捷。
作为本发明的一种优选技术方案,还包括缓冲弹簧34,缓冲弹簧34固定套接于长螺栓33的外侧面,缓冲弹簧34的两端分别于固定板32的下表面和毛刷盘2的上表面固定连接,通过缓冲弹簧34可对长螺栓33进行安装防护,从而可使毛刷盘2在使用时能够对不同的钢铁表面进行适应,由此可使本真空回收式爬壁除锈机器人具有极强的适用性。
作为本发明的一种优选技术方案,还包括固定螺栓4,固定螺栓4均匀设于毛刷盘2的外侧面,通过固定螺栓4可使毛刷盘2的固定安装更为稳定,从而使本真空回收式爬壁除锈机器人的清理效果更佳。
作为本发明的一种优选技术方案,还包括锁紧环8,锁紧环8共两个,锁紧环8设于固定杆20与防护盒17的配合插接安装处,通过锁紧环8可使固定杆20与防护盒17之间的配合插接安装更为稳固,从而使本真空回收式爬壁除锈机器人的组合安装更为稳固。
作为本发明的一种优选技术方案,还包括从动轮15,从动轮15对称设于尾板14的下表面两端,通过从动轮15可对本真空回收式爬壁除锈机器人通过移动单元9的移动过程进行辅助,从而使本真空回收式爬壁除锈机器人的移动效率得到提升。
作为本发明的一种优选技术方案,还包括接线盒19,接线盒19设于安装框1的上表面后端,接线盒19的上表面设有固定架,通过接线盒19可将本真空回收式爬壁除锈机器人内的各种线缆进行收纳,从而使本真空回收式爬壁除锈机器人更具美观性和安全性。
作为本发明的一种优选技术方案,还包括安装夹18,安装夹18共四个,安装夹18均匀设于回收管10的外侧面,其中两个安装夹18与安装框1 的上表面配合固定安装,另外两个安装夹18与接线盒19上表面设置的固定架配合固定安装,通过安装夹18可快速的对回收管10进行固定安装,从而使回收管10的工作过程中更为稳定,由此可使本真空回收式爬壁除锈机器人的回收工作更为稳定。
本发明的工作原理:通过电控装置内的PLC板控制编程对工作线路进行规划,然后将侧部永磁块13和尾部永磁块16可将本真空回收式爬壁除锈机器人快速的吸附于钢铁表面,然后通过电机92使减速器93工作,使减速器93 带动传动轴94进行转动,进而使移动轮95带动本真空回收式爬壁除锈机器人进行前进后退转向等移动动作,同时,通过清洗盘5带动清洗喷头12对钢铁表面进行清理,然后通过毛刷盘2对钢铁表面进行清理,由此可完成对钢铁表面的除锈除漆工作,然后通过回收孔11和回收管10可完成对废水废锈的回收。
本发明涉及的电路连接为本领域技术人员采用的惯用手段,可通过有限次试验得到技术启示,属于广泛使用的现有技术。
本文中未详细说明的部件为现有技术。
上述虽然对本发明的具体实施例作了详细说明,但是本发明并不限于上述实施例,在本领域普通技术人员所具备的知识范围内,还可以在不脱离本发明宗旨的前提下做出各种变化,而不具备创造性劳动的修改或变形仍在本发明的保护范围以内。