大灯控制系统及控制方法
文献发布时间:2023-06-19 19:33:46
技术领域
本发明涉及车灯控制技术领域,尤其涉及一种大灯控制系统及控制方法。
背景技术
随着汽车行业的不断发展,对于汽车智能化和车身控制的要求也在不断提高,这使得汽车电子在整车中占据着越来越重要的作用。车灯是汽车电子的重要组成部分之一,近年来,车灯的功能和种类也越来越多样化,如何提高车灯开发效率和降低设计难度和成本成为了目前行业内非常关注的课题。
传统的大灯控制器对于不同的汽车型号,需要根据其具体要求来定制满足厂家要求的硬件和软件。通过这种模式设计出的控制器,不仅设计周期偏长,而且通常很难和其他型号的车灯控制系统兼容,换一种汽车型号就需要重新设计控制器,不仅硬件需要有较多的改动,软件也需要很多结构上的调整。因此,现有的控制器结构缺乏良好的可移植性和复用性。
发明内容
本发明要解决的技术问题是:为了解决传统的大灯控制器复用性和可移植性低的技术问题,本发明提供一种大灯控制系统及控制方法,能够提高大灯控制器的可移植性、复用性,还能节约开发成本。
本发明解决其技术问题所采用的技术方案是:一种大灯控制系统,包括:
大灯控制器,以及
车身控制器,所述车身控制器与所述大灯控制器连接;
CAN收发器,所述CAN收发器与所述大灯控制器连接;
LED驱动模块,所述LED驱动模块与所述CAN收发器连接;
LED灯,所述LED灯与所述LED驱动模块连接;
其中,所述车身控制器能够下发参数配置信息给所述大灯控制器,所述大灯控制器基于所述参数配置信息对自身功能进行初始化或升级;所述大灯控制器通过接收所述车身控制器下发的控制报文控制所述LED驱动模块;所述大灯控制器通过接收所述车身控制器下发的数据报文实现通信功能。
进一步的,所述大灯控制器包括:MCU控制模块以及通信模块,所述通信模块与所述MCU控制模块连接,所述通信模块与所述车身控制器连接,所述通信模块与所述LED驱动模块连接。
进一步的,所述大灯控制器还包括:驱动控制模块,所述驱动控制模块与所述MCU控制模块连接,所述驱动控制模块与LED驱动模块连接。
进一步的,所述大灯控制器还包括:采集模块,所述采集模块与所述LED驱动模块连接,所述采集模块与所述MCU控制模块连接。
进一步的,所述驱动控制模块的驱动方式包括:高边供电驱动、DC恒流驱动、DC恒压驱动、PWM驱动中的至少一种。
进一步的,所述采集模块的采集方式包括:ADC采样、输入信号识别。
进一步的,所述MCU控制模块的软件架构包括:
用户接口层,用于接收所述车身控制器下发的参数配置信息、控制报文和数据报文;
应用层,用于根据接收的参数配置信息、控制报文、数据报文实现相应的任务;
领域层,用于执行具体的任务、监控任务状态信息、制定任务规则;
基础设施层,用于为用户接口层、应用层、领域层提供底层驱动。
进一步的,所述参数配置信息包括:LED驱动模块的芯片型号、诊断信号、控制报文格式以及数据报文格式。
进一步的,所述通信模块的通信方式包括:I2C通信、SPI通信、UART通信、LIN通信、CAN通信。
本发明还提供一种大灯控制方法,采用所述的大灯控制系统,所述方法包括以下步骤:
S1、给大灯控制系统上电,对大灯控制器进行初始化;
S2、所述大灯控制器接收车身控制器下发的控制报文并判断是否需要对所述大灯控制器进行功能升级,若需要,则对所述大灯控制器的升级后返回步骤S1;若不需要,则执行步骤S3;
S3、所述大灯控制器接收车身控制器下发的参数配置信息并判断是否需要进行参数重置,若不需要,则所述大灯控制器加载存储器中的对应的参数配置信息,根据所述参数信息初始化所述大灯控制器的通信功能和驱动功能;若需要,则将新的参数配置信息保存至存储器中,所述大灯控制器再加载该参数配置信息对所述大灯控制器的通信功能和驱动功能进行初始化;
S4、所述大灯控制器利用配置好的参数执行相应的功能任务。
本发明的有益效果是,本发明的大灯控制系统及控制方法,通过接收车身控制器下发的参数配置信息,根据参数配置信息初始化大灯控制器的通讯功能和驱动功能以适配不同的车型,大灯控制器根据车身控制器下发的控制报文以控制LED驱动模块,大灯控制器根据数据报文可以实现相应的通信功能。由此,针对不同的车型,不需要重新设计大灯控制器的结构,只需要对大灯控制器的通讯、驱动功能进行更改即可,可以提高大灯控制器的复用性和可移植性,提高大灯控制器的可利用率,节约成本。
附图说明
下面结合附图和实施例对本发明进一步说明。
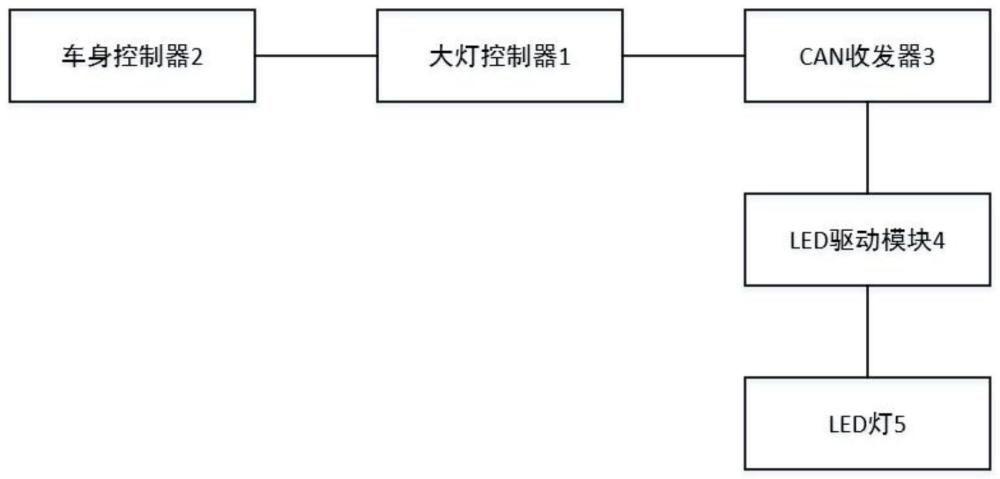
图1是本发明的大灯控制系统的结构示意图。
图2是本发明的MCU控制模块的结构框图。
图3是本发明的MCU控制模块的具体结构示意图。
图4是本发明的MCU控制模块软件架构的示意图。
图5是本发明的大灯控制方法的流程图。
图中:1、大灯控制器;2、车身控制器;3、CAN收发器;4、LED驱动模块;5、LED灯;11、MCU控制模块;12、通信模块;13、驱动控制模块;14、采集模块;111、用户接口层;112、应用层;113、领域层;114、基础设施层;121、外部CAN单元;122、私有CAN单元;123、私有LIN单元;141、ADC采样单元;142、输入识别单元。
具体实施方式
现在结合附图对本发明作进一步详细的说明。这些附图均为简化的示意图,仅以示意方式说明本发明的基本结构,因此其仅显示与本发明有关的构成。
在本发明的描述中,需要理解的是,术语“中心”、“纵向”、“横向”、“长度”、“宽度”、“厚度”、“上”、“下”、“前”、“后”、“左”、“右”、“竖直”、“水平”、“顶”、“底”“内”、“外”、“顺时针”、“逆时针”、“轴向”、“径向”、“周向”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制。此外,限定有“第一”、“第二”的特征可以明示或者隐含地包括一个或者更多个该特征。在本发明的描述中,除非另有说明,“多个”的含义是两个或两个以上。
在本发明的描述中,需要说明的是,除非另有明确的规定和限定,术语“安装”、“相连”、“连接”应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或一体地连接;可以是机械连接,也可以是电连接;可以是直接相连,也可以通过中间媒介间接相连,可以是两个元件内部的连通。对于本领域的普通技术人员而言,可以具体情况理解上述术语在本发明中的具体含义。
如图1所示,本发明的大灯控制系统,包括:大灯控制器1、车身控制器2、CAN收发器3、LED驱动模块4及LED灯5,车身控制器2与大灯控制器1连接,CAN收发器3与大灯控制器1连接,LED驱动模块4与CAN收发器3连接,LED灯5与LED驱动模块4连接。其中,车身控制器2能够下发参数配置信息给大灯控制器1,大灯控制器1基于参数配置信息对自身功能进行初始化或升级,大灯控制器1通过接收车身控制器2下发的控制报文控制LED驱动模块4,大灯控制器1通过接收车身控制器2下发的数据报文实现通信功能。
换言之,本发明的大灯控制器1通过接收车身控制器2下发的参数配置信息,根据参数配置信息初始化大灯控制器1的通讯功能和驱动功能以适配不同的车型,大灯控制器1根据车身控制器2下发的控制报文以控制LED驱动模块4,大灯控制器1根据数据报文可以实现相应的通信功能。由此,针对不同的车型,不需要重新设计大灯控制器1的结构,只需要对大灯控制器1的通讯、驱动功能进行更改即可,可以提高大灯控制器1的复用性和可移植性,提高大灯控制器1的可利用率,节约成本。
大灯控制器1包括:MCU控制模块11以及通信模块12,通信模块12与MCU控制模块11连接,通信模块12与车身控制器2连接,通信模块12与LED驱动模块4连接。通信模块12的通信方式包括:I2C通信、SPI通信、UART通信、LIN通信、CAN通信。大灯控制器1还包括:驱动控制模块13,驱动控制模块13与MCU控制模块11连接,驱动控制模块13与LED驱动模块4连接。驱动控制模块13的驱动方式包括:高边供电驱动、DC恒流驱动、DC恒压驱动、PWM驱动中的至少一种。大灯控制器1还包括:采集模块14,采集模块14与LED驱动模块4连接,采集模块14与MCU控制模块11连接。采集模块14的采集方式包括:ADC采样、输入信号识别。参数配置信息包括:LED驱动模块4的芯片型号、诊断信号、控制报文格式以及数据报文格式。
换言之,本发明的大灯控制器1具有多种通信方式、驱动方式以及采集方式,大灯控制器1可以根据参数配置信息、控制报文、数据报文来选择需要的通信方式、驱动方式、采集方式。例如,高边供电驱动的芯片型号为TPS55288,LED驱动模块4的芯片型号为TPS929120,恒压/恒流驱动的芯片型号为TPS92682,CAN通信的芯片型号为TLE9261。这些芯片均可以被MCU控制模块11唤醒驱动。驱动控制模块13可以驱动LED驱动模块4工作。例如,通信模块12包括外部CAN单元121、私有CAN单元122和私有LIN单元123,外部CAN单元121、私有CAN单元122和私有LIN单元123均与MCU控制模块11连接,外部CAN单元121与车身控制器2连接,私有CAN单元122、私有LIN单元123均与LED驱动模块4连接。采集模块14包括ADC采样单元141和输入识别单元142,ADC采样单元141、输入识别单元142均与MCU控制模块11连接,ADC采样单元141、输入识别单元142均与LED驱动模块4连接,ADC采样单元141可以采集LED驱动模块4的电压、电流、温度数据发送给MCU控制模块11,MCU控制模块11根据采集到的电压、电流、温度数据进行过压、欠压、过电流、过温诊断,及时发现存在的故障问题。输入识别单元142可以采集LED驱动模块4的电压数据发送给MCU控制模块11,MCU控制模块11通过电压的高低电平识别故障。当然,ADC采样单元141和输入识别单元142还可以与其他需要检测的模块连接。
例如,DC恒压驱动具备4通道+2备用通道,输入电压为7.5V-17V,工作电压为9V-16V,单通道输出电压为5V-20V,单通道输出电流为0A-5A,单通道最大输出功率为40W,具备过压/欠压/过电流/过温检测功能。DC恒流驱动具备2通道,输入电压为7.5V-17V,工作电压为9V-16V,单通道输出电压为5V-25V,单通道输出电流为0.2A-1.2A,单通道最大输出功率为30W,具备过压/欠压/过电流/过温检测功能。高边供电驱动具备4通道,单通道输出电流为2.5A,通道损耗为1W。PWM驱动具备4通道,单通道输出电压为12V/5V,单通道输出电流为2mA-5mA,单通道输出频率为200Hz(DC)。ADC采样单元141具备10通道,单通道上拉电压为5V,单通道上拉阻值为10KΩ,单通道上拉精度为1%。输入识别单元142具备9通道,单通道输入电压为9V-16V,单通道输入电流为0mA-5mA,单通道输入频率为200Hz(DC)。换言之,大灯控制器1的驱动控制模块13和采集模块14均具备多通道,可以同时驱动或采集多个LED驱动模块4,可选择性高。
大灯控制器1还包括输入防反模块和滤波模块,输入防反模块与车身电瓶连接,滤波模块与输入防反模块连接,输入防反模块可以防止电源反接而损坏系统,滤波模块与驱动控制模块13连接。
需要说明的是,大灯控制器1除了硬件部分外,还包括软件部分。MCU控制模块11的软件架构包括:用户接口层111,用于接收车身控制器2下发的参数配置信息、控制报文和数据报文;应用层112,用于根据接收的参数配置信息、控制报文、数据报文实现相应的任务;领域层113,用于执行具体的任务、监控任务状态信息、制定任务规则;基础设施层114,用于为用户接口层111、应用层112、领域层113提供底层驱动。
软件部分的主要功能包括OTA升级、故障诊断、网络管理、标准化的AUTOSAR、BootLoader、底层驱动程序、OS操作系统和应用软件。BootLoader可以利用参数配置信息对TPS55288芯片、TPS929120芯片、TPS92682芯片、TLE9261芯片的驱动程序进行初始化。软件架构以AUTOSAR4.2.2规范为基础,以领域驱动设计分层架构为主要结构。其中,用户接口层111用于接收车身控制器2下发的参数配置信息、控制报文、数据报文以及其他需求信息,例如可以通过CAN总线接收报文,对报文进行解析后将需求发送给应用层112。应用层112根据用户接口层111发送的需求信息,定义软件需要完成的任务,并且协调领域层113的对象完成任务目标。应用层112要尽量简单,不包含任务规则,只为领域层113的对象协调任务、分配工作。例如,应用层112负责网络管理、供电协调、控制任务协调,应用层112包含电源功能模块、CANSM功能模块、CANNM功能模块、DCM功能模块、DEM功能模块等,电源功能模块负责提供MCU控制模块11所需要的电压和电流,CANSM功能模块负责网络管理和总线通信状态的控制,CANNM功能模块负责CAN总线的工作模式、睡眠模式等模式之间互相切换,DCM功能模块负责诊断数据流以及诊断状态的管理,DEM功能模块负责处理诊断事件的信息和相关的数据。领域层113的内容是各个模块需要完成一些既定目标的具体流程,包括通信功能的使用,数据信息的处理,控制逻辑的实施。例如,MCU控制模块11通过I2C与TPS55288芯片通信,实现目标电压输出,通过SPI与TPS92682芯片通信,实现目标电流输出,等等,基于AUTOSAR的CAN总线实现不同功能模块的协调调度、DCM中UDS协议的服务函数、DEM中DTC模块、Bootloader等功能。基础设施层114为应用层112传递消息,为领域层113提供持久化机制等等,基础设施层114还能够通过架构框架来支持四个层之间的交互模式,基础设施层114具有领域层113调用的实施具体流程的底层驱动代码,可以接收领域层113的需求的具体处理结果驱动设备实现控制,对具体的数据进行读取和存储,以供其他层在需要的时候使用。其他层在逻辑简单的时候,也可以直接与本层交互。基础设施层114主要负责I2C、SPI、UART、LIN、CAN等通信协议的驱动,TPS55288芯片、TPS929120芯片、TPS92682芯片、TLE9261芯片的驱动,DMA、ADC、flash等外设模块的驱动等功能。
如图所示,本发明还提供一种大灯控制方法,采用大灯控制系统。该控制方法包括以下步骤:
S1、给大灯控制系统上电,对大灯控制器1进行初始化。
S2、大灯控制器1接收车身控制器2下发的控制报文并判断是否需要对大灯控制器1进行功能升级,若需要,则对大灯控制器1的升级后返回步骤S1;若不需要,则执行步骤S3。
S3、大灯控制器1接收车身控制器2下发的参数配置信息并判断是否需要进行参数重置,若不需要,则大灯控制器1加载存储器中的对应的参数配置信息,根据参数信息初始化大灯控制器1的通信功能和驱动功能;若需要,则将新的参数配置信息保存至存储器中,大灯控制器1再加载该参数配置信息对大灯控制器1的通信功能和驱动功能进行初始化。
S4、大灯控制器1利用配置好的参数执行相应的功能任务。
需要说明的是,大灯控制器1的主要功能包括:识别上层车身控制器2发送的参数配置信息、检查参数设置信息错误、将参数设置信息保存在大灯控制器1的存储器中、初始化参数配置信息指定的功能模块、OTA升级、故障诊断、网络管理、标准化的AUTOSAR软件内容、BootLoader、各模块底层驱动、OS操作系统、应用软件等。车身控制器2下发的控制报文包含8个byte,可以根据不同需求设置8个byte中的携带的信息,例如,在BootLoader中,可以通过控制报文携带的UDS服务函数的ID判断是否要对大灯控制器1进行功能升级,不同的ID对应不同的服务函数。
系统上电后,首先对大灯控制器1进行初始化,此时,大灯控制器1可以接收车身控制器2下发的参数配置信息、控制报文、数据报文,大灯控制器1通过对控制报文进行解析可以判断是否需要对大灯控制器1进行功能升级,如果需要,则升级后返回步骤S1,如果不需要,则可以根据参数配置信息对大灯控制器1进行参数设置。大灯控制器1通过对参数配置信息进行解析,可以判断是否需要对大灯控制器1的参数进行重置,如果不需要,则大灯控制器1直接调用存储器中与该参数配置信息相对应的数据进行功能配置即可,如果需要,则将该参数配置信息先存储至存储器中,大灯控制器1再加载该参数配置信息进行功能配置。是否需要进行参数重置也可以从控制报文携带的信息中判断出来,例如,判断需要配置的参数是否和当前的参数一致,如果一致则不需要重新设置;如果不一致则需要进行参数重置。换言之,根据不同车型的要求,车身控制器2可以生成匹配的参数配置信息发送给大灯控制器1,从而使得大灯控制器1的驱动功能、通信功能、控制功能符合该车型的要求。
例如,用户接口层111根据上层车身控制器2的控制报文判断是否需要升级,如果需要升级,则发送需求给应用层112,再由应用层112对领域层113进行协调,通过CAN通讯进行更新。如果不需要升级,大灯控制器1会进入当前参数设置的工作状态,等待接收报文或者一层一层传递控制信息执行相关任务。当上层车身控制器2有新的参数配置信息下发时,将新的参数配置信息保存至存储器中,再进行加载,对通讯和驱动功能重新初始化。进入OS操作系统可以实时接收车身控制器2的控制报文。通过网络管理,对LED灯5执行控制,同时查询灯具故障。
综上所述,本发明的大灯控制器1通过软件部分实现对LED灯5的控制,同时硬件和软件还具有很高的可移植性和复用性,通过参数配置对大灯控制器1进行初始化来决定其每个输出的功能,符合不同车型的要求,也降低了灯具开发的设计难度和成本。本发明能够提高软件的复用度,分层架构使得汽车嵌入式系统软硬件耦合度大大降低,便于软件的升级维护;标准化软件接口和模块,可以减少设计错误。在硬件方面,大灯控制器1可以通过CAN总线与车身控制器2通信,获取不同的参数配置信息,并通过参数配置信息实现对于不同车型和功能的适配;在软件方面,领域驱动设计分层架构由于其分层结构的便利性,可以在不改变主体部分的情况下,快速修改其中的不同功能模块,实现快速的设计便捷性和良好的代码复用性。
以上述依据本发明的理想实施例为启示,通过上述的说明内容,相关工作人员完全可以在不偏离本项发明技术思想的范围内,进行多样的变更以及修改。本项发明的技术性范围并不局限于说明书上的内容,必须要如权利要求范围来确定其技术性范围。
- 一种基于车载视觉的车辆大灯调节控制方法及控制系统
- 一种前大灯控制系统、控制方法及其设备
- 汽车大灯角度自动调节控制系统及控制方法