一种便于固定的翅片管自动焊接装置
文献发布时间:2023-06-19 09:27:35
技术领域
本发明涉及翅片管焊接技术领域,具体涉及一种便于固定的翅片管自动焊接装置。
背景技术
翅片管是一种换热元件,是为了提高换热效率,通常在换热管的表面通过加翅片,增大换热管的外表面积,从而达到提高换热效率的目的,翅片管在加工的过程中需要使用到焊接装置将翅片焊接在换热管上,现如今大多的焊接装置是将翅片绕设焊接在翅片管上,并没有专门针对条形翅片焊接固定在翅片管的外侧壁上的焊接装置,在焊接的过程中,则需要单个的进行上料,费时费力。
发明内容
本发明的目的在于针对现有技术的缺陷和不足,提供一种设计合理、使用方便的便于固定的翅片管自动焊接装置,在进行焊接的过程中,可自动上料,无需人工进行单个上料,从而减少工作人员的劳动量,达到省时省力的效果。
为实现上述目的,本发明采用的技术方案是:它包含工作台、支撑脚、支撑板和顶板,工作台下表面的四角均固定有支撑脚,工作台上表面的后侧固定有支撑板,支撑板前侧壁的上侧固定有顶板,该顶板悬设在工作台的上方;它还包含固定机构、上料机构和焊接机构,工作台上表面的中心设有固定机构,该固定机构中的固定板分别设置于工作台上表面的左右两侧,工作台上表面的前侧设有上料机构,该上料机构中的储料箱设置在工作台的上表面上,上料机构的上方悬设有焊接机构,该焊接机构中的一号滑轨分别固定在顶板下表面的左右两侧;
上述的固定机构还包含一号电机、固定架、一号丝杆、限位杆、转盘和定位杆,一号电机固定在一侧的固定板的一侧壁上,一号电机与外部电源连接,一号电机的输出轴插设在一侧的固定板内,且一号电机的输出轴与一侧的固定架一侧壁上的凸起固定连接,左右两侧的固定架上的凸起分别通过轴承与两侧的固定板旋接,固定架的内部均嵌设有一号丝杆,该一号丝杆的下端通过轴承与固定架的下侧壁旋接,一号丝杆的上端穿过固定架上侧壁内的轴承后,与转盘的下表面固定连接,转盘的一侧插设有定位杆,该定位杆穿过转盘后,通过螺纹与固定架上侧的外侧壁旋接,固定架一侧的上下两侧均设有限位杆,该限位杆的一端分别穿过固定架的一侧壁后,与一号丝杆上下两端的丝母固定连接,一号丝杆以中端为中心向两侧螺纹相反设置;
上述的上料机构还包含二号丝杆、升降板、转动轮和二号电机,储料箱的内部设有升降板,该升降板的左右两侧分别与二号丝杆上的丝母固定连接,二号丝杆的下端分别通过轴承与储料箱的下侧壁旋接,二号丝杆的上端穿过储料箱的上侧壁后,插设固定在一号伞齿轮内,一号伞齿轮与二号伞齿轮啮合设置,二号伞齿轮的中心内插设有转杆,该转杆的前端穿过支板后,插设固定在转动轮内,支板固定在储料箱上侧的外侧壁上,左右两侧的转动轮之间通过传动带连接,其中一个转动轮的前侧设有二号电机,该二号电机与外部电源连接,二号电机通过支架固定在一侧的支板的前侧壁上,二号电机的输出轴与其中一个转杆的前端固定连接;
上述的焊接机构还包含一号滑块、连接板、侧板、三号丝杆、导向柱、三号电机、电动推杆、焊接机和移动板,焊接机固定在顶板的上侧壁上,焊接机中的焊接头与电动推杆固定连接,电动推杆固定在移动板的下表面上,移动板上表面的一侧与导向柱上的直线轴承固定连接,导向柱的两端分别固定在左右两侧的侧板上,一侧的侧板的一侧壁上固定有三号电机,该三号电机与外部电源连接,三号电机的输出轴穿过一侧的侧板后,与三号丝杆的一端固定连接,三号丝杆上的丝母与移动板上表面的另一侧固定连接,左右两侧的侧板的上侧分别固定在连接板下表面的左右两侧,连接板上表面的两侧均固定有一号滑块,左右两侧的一号滑块分别滑动设置在左右两侧的一号滑轨上,且一号滑块通过定位栓与一号滑块连接。
进一步地,所述的限位杆的外端上均套设有防滑圈,在使用过程中,通过防滑圈增加翅片管与限位杆之间的摩擦力。
进一步地,所述的储料箱前侧内侧壁的上侧设有凹槽,该凹槽内嵌设有光线传感器,该光线传感器与固定架的中心呈同一水平面设置,光线传感器与控制器连接,该控制器固定在储料箱前侧的外侧壁上,控制器与二号电机连接,在使用时,当最上侧的翅片焊接在翅片管上后,跟随翅片管转动,使得光线传感器露出,通过光线传感器将信号传送给控制器,再通过控制器启动二号电机,使得升降板向上移动,当翅片移动至光线传感器的后侧时,则再通过光线传感器将信号传送至控制器,控制器关闭二号电机。
进一步地,所述的储料箱前侧外侧壁的左右两侧均固定有固定片,该固定片通过螺栓与工作台固定连接,通过固定片将储料箱固定在工作台上。
进一步地,所述的工作台上表面的前后两侧均固定有二号滑轨,该二号滑轨上均滑动设置有二号滑块,该二号滑块分别与一侧的固定板下侧壁的前后两侧固定连接,一侧的固定板下侧壁的中心与四号丝杆上的丝母固定连接,该四号丝杆的一端通过轴承与另一侧的固定板旋接,该固定板的下侧与工作台的上表面固定连接,四号丝杆的另一端穿过限位板后,悬设在限位板的一侧,限位板的下侧固定在工作台上表面的一侧,在使用时,根据翅片管的长度,转动四号丝杆,四号丝杆通过其上的丝母带动一侧的固定板向中心移动,固定板带动固定架向中心移动,直至两侧的固定架之间的距离与翅片管的长度相同。
进一步地,所述的四号丝杆的一端固定有摇柄,该摇柄旋在限位板的外侧,需转动四号丝杆时,通过摇柄带动四号丝杆转动。
本发明的工作原理:在使用时,先将需焊接的翅片放置在储料箱内的升降板上,直至最上侧的翅片与固定架的中心在同一水平面上,然后转动转盘,转盘带动一号丝杆转动,一号丝杆通过其上的丝母带动限位杆向中心移动弄,直至上下两个限位杆接触,再先将翅片管的一端套至一侧的两个限位杆上,再将翅片管的另一侧套设在另一侧的两个限位杆上,然后反向转动转盘,转盘带动一号丝杆反向转动,一号丝杆通过其上的丝母带动上下两侧的限位杆向两侧移动,直至上下两个限位杆分别抵触在翅片管上下两侧的内壁上,再通过定位杆对转盘进行限位,此时则将翅片管固定好了,然后柑橘翅片管的大小,移动连接板,连接板通过侧板带动三号丝杆移动,三号丝杆通过移动板带动电动推杆移动,电动推杆带动焊接机上的焊接头移动,直至焊接头与翅片管的最前侧呈同一垂直面,再通过定位栓将一号滑块进行限位,然后将储料箱箱后侧移动,使得储料箱内最上侧的翅片与翅片管接触,最后启动三号电机,三号电机带动三号丝杆转动,三号丝杆通过其上的丝母带动移动板移动,移动板通过电动推杆带动焊接头向一侧移动,直至该焊接头位于翅片一侧的上方,此时则调节完成,在焊接时,启动焊接机、电动推杆,电动推杆带动焊接头向下移动,使得焊接头抵在翅片管和翅片的连接处,通过焊接头对翅片管和翅片进行焊接,然后反向启动三号电机,三号电机带动三号丝杆转动,三号丝杆通过其上的丝母带动移动板移动,移动板通过电动推杆带动焊接头移动,在移动的过程中使得翅片整体均焊接至翅片管上,当该翅片焊接完成后,启动一号电机,一号电机带动一侧的固定架转动,该固定架通过限位杆带动翅片管转动,直至翅片管转动至下一个需焊接翅片的位置,与此同时,启动二号电机,该二号电机带动其中一个转杆转动,该转杆带动其上的转动轮转动,该转动轮通过传动带带动另一个转动轮转动,该转动轮则带动其内部的转杆转动,两个转杆同时带动两侧的二号伞齿轮转动,二号伞齿轮带动一号伞齿轮转动,一号伞齿轮带动二号丝杆转动,两侧的二号丝杆则通过其上的丝母带动升降板移动,直至下侧的翅片到达固定架的中心位置,再重复上述的工序。
采用上述结构后,本发明的有益效果为:
1、在进行焊接的过程中,可自动上料,无需人工进行单个上料,从而减少工作人员的劳动量,达到省时省力的效果;
2、焊接机中的焊接头通过电动推杆固定在移动板上,可在焊接的过程中,从翅片管的一侧移动至另一侧,从而方便进行焊接固定;
3、焊接机构中的连接板通过一号滑块滑动设置在一号滑轨上,在使用时,可根据翅片管直径的大小来调节焊接头的位置,从而方便操作。
附图说明
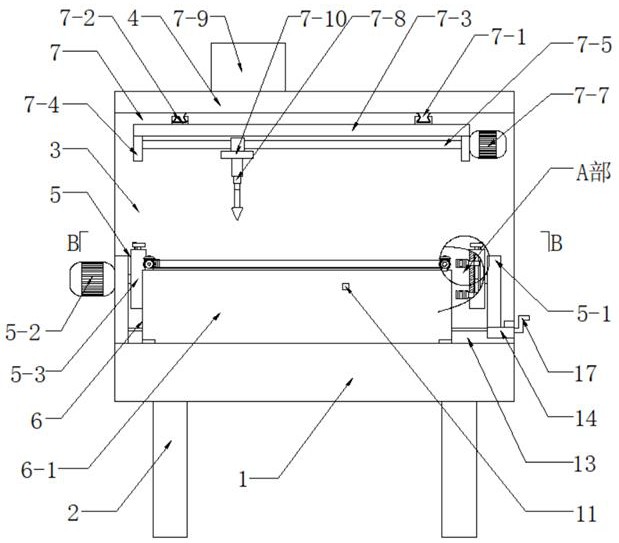
图1为本发明的结构示意图。
图2为图1中A部放大图。
图3为图1中B-B向剖视图。
图4为图3中C部放大图。
图5为图3中D部放大图。
图6为图1的左视图。
图7为本发明中储料箱的结构示意图。
附图标记说明:
工作台1、支撑脚2、支撑板3、顶板4、固定机构5、固定板5-1、一号电机5-2、固定架5-3、一号丝杆5-4、限位杆5-5、转盘5-6、定位杆5-7、上料机构6、储料箱6-1、二号丝杆6-2、升降板6-3、转动轮6-4、二号电机6-5、一号伞齿轮6-6、二号伞齿轮6-7、转杆6-8、支板6-9、焊接机构7、一号滑轨7-1、一号滑块7-2、连接板7-3、侧板7-4、三号丝杆7-5、导向柱7-6、三号电机7-7、电动推杆7-8、焊接机7-9、移动板7-10、防滑圈8、凹槽9、光线传感器10、控制器11、固定片12、二号滑轨13、二号滑块14、四号丝杆15、限位板16、摇柄17。
具体实施方式:
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
如图1-图7所示,本具体实施方式采用如下技术方案:它包含工作台1、支撑脚2、支撑板3和顶板4,工作台1下表面的四角均焊接固定有支撑脚2,工作台1上表面的后侧焊接固定有支撑板3,支撑板3前侧壁的上侧焊接固定有顶板4,该顶板4悬设在工作台1的上方;它还包含固定机构5、上料机构6和焊接机构7,工作台1上表面的中心设有固定机构5,该固定机构5中的固定板5-1分别设置于工作台1上表面的左右两侧,固定机构5还包含一号电机5-2、固定架5-3、一号丝杆5-4、限位杆5-5、转盘5-6和定位杆5-7,一号电机5-2通过螺栓固定在左侧的固定板5-1的左侧壁上,一号电机5-2与外部电源连接,一号电机5-2的型号为50KTYZ,一号电机5-2的输出轴插设在左侧的固定板5-1内,且一号电机5-2的输出轴与左侧的固定架5-3左侧壁上的凸起焊接固定,左右两侧的固定架5-3上的凸起分别通过轴承与两侧的固定板5-1旋接,该轴承嵌设在左右两侧的固定板5-1内,且其外圈分别与左右两侧的固定板5-1的内侧壁焊接固定,其内圈分别与左右两侧的固定架5-3上的凸起焊接固定,该凸起与固定架5-3为一体式结构,固定架5-3的内部均嵌设有一号丝杆5-4,该一号丝杆5-4的下端通过轴承与固定架5-3的下侧壁旋接,该轴承嵌设在固定架5-3的下侧壁内,且其外圈与固定架5-3下侧的内侧壁焊接固定,其内圈与一号丝杆5-4的下端焊接固定,一号丝杆5-4的上端穿过固定架5-3上侧壁内的轴承后,与转盘5-6的下表面焊接固定,该轴承的外圈与固定架5-3上侧的内侧壁焊接固定,其内圈与一号丝杆5-4的上端焊接固定,转盘5-6的一侧插设有定位杆5-7,该定位杆5-7穿过转盘5-6后,通过螺纹与固定架5-3上侧的外侧壁旋接,固定架5-3一侧的上下两侧均设有限位杆5-5,该限位杆5-5的外端上均套设有防滑圈8,在使用过程中,可防止翅片管打滑,限位杆5-5的一端分别穿过固定架5-3的一侧壁后,与一号丝杆5-4上下两端的丝母焊接固定,一号丝杆5-4以中端为中心向两侧螺纹相反设置;
工作台1上表面的前侧设有上料机构6,该上料机构6中的储料箱6-1设置在工作台1的上表面上,上料机构6还包含二号丝杆6-2、升降板6-3、转动轮6-4和二号电机6-5,储料箱6-1前侧外侧壁的左右两侧均焊接固定有固定片12,该固定片12通过螺栓与工作台1固定连接,通过固定片12对储料箱6-1进行限位,储料箱6-1的内部设有升降板6-3,该升降板6-3的左右两侧分别与二号丝杆6-2上的丝母焊接固定,二号丝杆6-2的下端分别通过轴承与储料箱6-1的下侧壁旋接,该轴承嵌设在储料箱6-1的下侧壁内,且其外圈与储料箱6-1下侧的内侧壁焊接固定,其内圈与二号丝杆6-2的下端焊接固定,二号丝杆6-2的上端穿过储料箱6-1的上侧壁后,插设焊接固定在一号伞齿轮6-6内,一号伞齿轮6-6与二号伞齿轮6-7啮合设置,二号伞齿轮6-7的中心内插设并焊接固定有转杆6-8,该转杆6-8的前端穿过支板6-9后,插设焊接固定在转动轮6-4内,支板6-9焊接固定在储料箱6-1上侧的外侧壁上,左右两侧的转动轮6-4之间通过传动带连接,右侧的转动轮6-4的前侧设有二号电机6-5,该二号电机6-5与外部电源连接,二号电机6-5通过支架固定在右侧的支板6-9的前侧壁上,二号电机6-5通过螺栓固定在支架上,该支架焊接固定在支板6-9的前侧壁上,二号电机6-5的型号为40KTYZ,二号电机6-5的输出轴与右侧的转杆6-8的前端焊接固定,储料箱6-1前侧内侧壁的上侧开设有凹槽9,该凹槽9内嵌设有光线传感器10,且通过螺栓固定,该光线传感器10与固定架5-3的中心呈同一水平面设置,光线传感器10的型号为GY-39-44009,光线传感器10与控制器11连接,控制器11的型号为AT89C52,该控制器11通过螺栓固定在储料箱6-1前侧的外侧壁上,控制器11与二号电机6-5连接,在使用时,可方便启动和关闭二号电机6-5;
上料机构6的上方悬设有焊接机构7,该焊接机构7中的一号滑轨7-1分别通过螺栓固定在顶板4下表面的左右两侧,焊接机构7还包含一号滑块7-2、连接板7-3、侧板7-4、三号丝杆7-5、导向柱7-6、三号电机7-7、电动推杆7-8、焊接机7-9和移动板7-10,焊接机7-9通过螺栓固定在顶板4的上侧壁上,焊接机7-9中的焊接头通过螺栓与电动推杆7-8固定连接,电动推杆7-8通过螺栓固定在移动板7-10的下表面上,移动板7-10上表面的后侧与导向柱7-6上的直线轴承焊接固定,导向柱7-6的两端分别焊接固定在左右两侧的侧板7-4上,右侧的侧板7-4的右侧壁上通过螺栓固定有三号电机7-7,该三号电机7-7与外部电源连接,三号电机7-7的型号为50KTYZ,三号电机7-7的输出轴穿过右侧的侧板7-4后,与三号丝杆7-5的右端焊接固定,三号丝杆7-5上的丝母与移动板7-10上表面的前侧焊接固定,左右两侧的侧板7-4的上侧分别焊接固定在连接板7-3下表面的左右两侧,连接板7-3上表面的两侧均焊接固定有一号滑块7-2,左右两侧的一号滑块7-2分别滑动设置在左右两侧的一号滑轨7-1上,且一号滑块7-2通过定位栓与一号滑块7-2连接;
工作台1上表面的前后两侧均通过螺栓固定有二号滑轨13,该二号滑轨13上均滑动设置有二号滑块14,该二号滑块14分别与右侧的固定板5-1下侧壁的前后两侧焊接固定,右侧的固定板5-1下侧壁的中心与四号丝杆15上的丝母焊接固定,该四号丝杆15的左端通过轴承与左侧的固定板5-1旋接,该轴承嵌设在左侧的固定板5-1内,且其外圈与左侧的固定板5-1的内侧壁焊接固定,其内圈与四号丝杆15的左端焊接固定,该固定板5-1的下侧与工作台1的上表面焊接固定,四号丝杆15的右端穿过限位板16后,与摇柄17焊接固定,可方便带动四号丝杆15转动,限位板16的下侧焊接固定在工作台1上表面的右侧,可根据翅片管的长度来调节右侧的固定板5-1的位置,从而适用于不同长度的翅片管。
本具体实施方式的工作原理:在使用前,先根据翅片管的长度,转动四号丝杆15,四号丝杆15通过其上的丝母带动右侧的固定板5-1向中心移动,固定板5-1带动固定架5-3向中心移动,直至两侧的固定架5-3之间的距离与翅片管的长度相同,在使用时,先将需焊接的翅片放置在储料箱6-1内的升降板6-3上,直至最上侧的翅片与固定架5-3的中心在同一水平面上,然后转动转盘5-6,转盘5-6带动一号丝杆5-4转动,一号丝杆5-4通过其上的丝母带动限位杆5-5向中心移动弄,直至上下两个限位杆5-5接触,再先将翅片管的一端套至一侧的两个限位杆5-5上,再将翅片管的另一侧套设在另一侧的两个限位杆5-5上,然后反向转动转盘5-6,转盘5-6带动一号丝杆5-4反向转动,一号丝杆5-4通过其上的丝母带动上下两侧的限位杆5-5向两侧移动,直至上下两个限位杆5-5分别抵触在翅片管上下两侧的内壁上,再通过定位杆5-7对转盘5-6进行限位,此时则将翅片管固定好了,然后柑橘翅片管的大小,移动连接板7-3,连接板7-3通过侧板7-4带动三号丝杆7-5移动,三号丝杆7-5通过移动板7-10带动电动推杆7-8移动,电动推杆7-8带动焊接机7-9上的焊接头移动,直至焊接头与翅片管的最前侧呈同一垂直面,再通过定位栓将一号滑块7-2进行限位,然后将储料箱6-1箱后侧移动,使得储料箱6-1内最上侧的翅片与翅片管接触,最后启动三号电机7-7,三号电机7-7带动三号丝杆7-5转动,三号丝杆7-5通过其上的丝母带动移动板7-10移动,移动板7-10通过电动推杆7-8带动焊接头向一侧移动,直至该焊接头位于翅片一侧的上方,此时则调节完成,在焊接时,启动焊接机7-9、电动推杆7-8,电动推杆7-8带动焊接头向下移动,使得焊接头抵在翅片管和翅片的连接处,通过焊接头对翅片管和翅片进行焊接,然后反向启动三号电机7-7,三号电机7-7带动三号丝杆7-5转动,三号丝杆7-5通过其上的丝母带动移动板7-10移动,移动板7-10通过电动推杆7-8带动焊接头移动,在移动的过程中使得翅片整体均焊接至翅片管上,当该翅片焊接完成后,启动一号电机5-2,一号电机5-2带动一侧的固定架5-3转动,该固定架5-3通过限位杆5-5带动翅片管转动,直至翅片管转动至下一个需焊接翅片的位置,此时光线传感器10露出,通过光线传感器10将信号传送给控制器11,再通过控制器11启动二号电机6-5,使得升降板6-3向上移动,当翅片移动至光线传感器10的后侧时,则再通过光线传感器10将信号传送至控制器11,控制器11关闭二号电机6-5,启动二号电机6-5,该二号电机6-5带动右侧的转杆6-8转动,该转杆6-8带动其上的转动轮6-4转动,该转动轮6-4通过传动带带动左侧的转动轮6-4转动,该转动轮6-4则带动其内部的转杆6-8转动,两个转杆6-8同时带动两侧的二号伞齿轮6-7转动,二号伞齿轮6-7带动一号伞齿轮6-6转动,一号伞齿轮6-6带动二号丝杆6-2转动,两侧的二号丝杆6-2则通过其上的丝母带动升降板6-3移动,直至下侧的翅片到达固定架5-3的中心位置,再重复上述的工序。
采用上述结构后,本具体实施方式的有益效果如下:
1、在进行焊接的过程中,可自动上料,无需人工进行单个上料,从而减少工作人员的劳动量,达到省时省力的效果;
2、焊接机7-9中的焊接头通过电动推杆7-8固定在移动板7-10上,可在焊接的过程中,从翅片管的一侧移动至另一侧,从而方便进行焊接固定;
3、焊接机构7中的连接板7-3通过一号滑块7-2滑动设置在一号滑轨7-1上,在使用时,可根据翅片管直径的大小来调节焊接头的位置,从而方便操作
4、右侧的固定板5-1固定在二号滑块14上,在固定时,可根据翅片管的长度来调节右侧的固定板5-1的位置,进而适用于不同大小的翅片管使用。
尽管参照前述实施例对本发明进行了详细的说明,对于本领域的技术人员来说,其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分技术特征进行等同替换,凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
- 一种便于固定的翅片管自动焊接装置
- 一种激光焊接翅片管自动焊接装置用工装夹具