用于自动化驾驶式车辆和非热力牵引机器的在混合阶段控制减速的方法和装置
文献发布时间:2023-06-19 11:57:35
技术领域
本发明涉及至少部分自动化(或自主)驾驶式的并且包括具有至少一个非热力牵引机器的动力总成的车辆。
在下文中,当车辆可在自动化驾驶阶段期间被自动化驾驶(部分或完全(没有驾驶员的介入))或在手动驾驶阶段期间被手动驾驶(因此受到驾驶员在方向盘和/或踏板上的介入)时,认为该车辆是至少部分自动化(或自主)驾驶式的。
背景技术
某些车辆包括动力总成(或GMP),所述动力总成包括至少一个非热力牵引机器(或发电机),即布置成基于存储在能量存储部件中的能量产生使车辆移动的转矩并且例如在减速阶段期间通过能量回收而回收能量(或转矩)以便为该能量存储部件供应能量。这种非热力牵引机器例如能够是电机(或电动机)、液压机、气动机(或空气压缩机)、或飞轮。应当注意,本发明所涉及的GMP可包括或是单独一个非热力牵引机器,或是至少两个非热力牵引机器,又或是至少一个热力发动机和至少一个非热力牵引机器(混合动力GMP)。
当前,当需要使上述类型的车辆降速(或减速)时,在自动化驾驶阶段中(至少部分地)控制其驾驶的计算机开始于通过利用由其GMP所布置的负转矩控制其制动(或减速),并且然后借助于其(通常为液压类型的)制动系统控制其制动(或减速)。现有技术中的该策略示出在图2A的多个图表上。更确切地,该多个图表(从顶部到底部)包括以下参数的时间(t单位为秒)变化曲线示例:
-车辆的以km/h为单位的速度v(曲线c1),
-GMP(曲线c2)或制动系统(曲线c3)的操控请求dp的状态,其中,顶部状态表示“是”(或“真”),底部状态表示“否”(或“假”),
-传输至GMP的转矩设定值cc(以Nm为单位)(曲线c4)以及允许的最小转矩(曲线c5),
-传输至制动系统的减速设定值cd(以m/s
-制动系统的主汽缸的压力pm(以巴为单位)(曲线c7),
-车辆a的所生成的总减速设定值(以m/s
从图2A上可看出,控制自动化驾驶的计算机利用GMP的允许的最小转矩c5直到时刻t1,然后向制动系统传输减速设定值c6。然而,该减速设定值c6没有考虑制动系统有效地诱导车辆减速所必须的时长。该时长具有两个组成部分:第一时长,如果GMP告知可用的能量回收势能,所述第一时长对于在制动系统与通过能量回收的(或再生)制动之间的总减速设定值c8的分配是必须的;以及第二时长,所述第二时长对于制动系统的液压泵的预布置是必须的。
如果控制自动化驾驶的计算机的控制动态相对于所述第二时长过于快速,则可能会有两个副作用:
-在制动系统中的分配未被正确执行,这导致在车辆的整体减速中的不连续性(在最坏的情况下(例如当车辆开始下坡时),这可造成车辆加速而不是减速),
-制动系统不能够在当前的回收性制动时预测其液压泵的激活,并且液压压力设定值整体以很快的动态进行发送,这可能引起液压泵的激活噪声。这构成了声学上的不适(甚至是乘客的担忧),当车辆处于全电动行驶阶段中,这种不适被最大化。
因此,本发明的目的尤其在于改善这种情况。
发明内容
本发明尤其为此提供了一种用于在车辆中实施的减速控制方法,所述车辆是至少部分自动化驾驶式的并且包括:
-非热力牵引机器,所述非热力牵引机器根据转矩设定值,基于存储在能量存储部件中的能量为所述车辆的至少一个车桥提供转矩,或通过在所述车桥上的能量回收而诱导所述车辆减速以便为所述能量存储部件供应能量,以及
-制动系统,所述制动系统根据减速设定值使所述车辆减速。
所述减速控制方法的特征在于,在其包括步骤中,在自动化驾驶阶段期间需要减速的情况下,根据允许的最小转矩以及至少一个约束确定所述转矩设定值直到有效地达到所述允许的最小转矩,并且根据所述约束且基于选择为先于第二时刻的第一时刻确定所述减速设定值,在所述第二时刻有效地达到所述允许的最小转矩,以便在所述第一时刻和第二时刻之间通过所述能量回收和所述制动系统得到所述减速。
由于本发明,现在具有三个阶段而不是两个,即:直到第一时刻的第一阶段,在所述第一阶段中制动是纯回收性的(通过GMP);(混合的)第二阶段,在所述第二阶段中制动同时地是回收性的和液压的(通过制动系统);以及第三阶段,在所述第三阶段中制动是纯液压的,这能够避免制动中的不连续性和/或液压泵的激活噪声。
根据本发明的减速控制方法可包括可分开或组合采用的其它特征,尤其是:
-在其步骤中,可在所述第一时刻和第二时刻之间确定转矩设定值,所述转矩设定值小于或等于在所述第一时刻之前确定的每个转矩设定值;
-在其步骤中,可根据转矩相对于所述允许的最小转矩的使用百分比选择所述第一时刻。在变型中,在其步骤中,可根据所述第二时刻选择所述第一时刻,所述第一时刻和第二时刻之间的偏差被预限定;
-所述约束可选自:所述车辆的驾驶员的减速意愿、分隔所述车辆与先于所述车辆的另一车辆的当前距离、所述车辆相对于先于所述车辆的另一车辆的当前相对速度、行驶有所述车辆的道路部分上检测到障碍物的存在、以及由所述驾驶员选择的并且限定所述驾驶员希望所述车辆行驶的速度的速度设定值。
本发明还提供了一种电脑程序产品,所述电脑程序产品包括一组指令,所述一组指令在由处理部件执行时适于实施上文所述类型的减速控制方法以控制车辆的减速,所述车辆是至少部分自动化驾驶式的并且一方面包括非热力牵引机器,所述非热力牵引机器根据转矩设定值,基于存储在能量存储部件中的能量为所述车辆的至少一个车桥提供转矩,或通过在所述车桥上的能量回收而诱导所述车辆减速以便为所述能量存储部件供应能量,以及另一方面包括制动系统,所述制动系统根据减速设定值使所述车辆减速。
本发明还提供了一种控制装置,所述控制装置一方面用于装配在车辆上,所述车辆是至少部分自动化驾驶式的并且包括非热力牵引机器,所述非热力牵引机器根据转矩设定值,基于存储在能量存储部件中的能量为所述车辆的至少一个车桥提供转矩,或通过在所述车桥上的能量回收而诱导所述车辆减速以便为所述能量存储部件供应能量,以及包括制动系统,所述制动系统根据减速设定值使所述车辆减速,并且所述控制装置另一方面包括至少一个计算机,所述至少一个计算机在自动化驾驶阶段中根据约束确定所述转矩设定值和所述减速设定值。
所述控制装置的特征在于,在自动化驾驶阶段期间需要减速的情况下,所述计算机根据允许的最小转矩确定所述转矩设定值直到有效地达到所述允许的最小转矩,并且基于选择为先于第二时刻的第一时刻确定所述减速设定值,在所述第二时刻有效地达到所述允许的最小转矩,以便在所述第一时刻和第二时刻之间通过所述能量回收和所述制动系统得到所述减速。
本发明还提供了一种任选地机动类型的车辆,所述车辆是至少部分自动化驾驶式的并且包括:
-非热力牵引机器,所述非热力牵引机器根据转矩设定值,基于存储在能量存储部件中的能量为所述车辆的至少一个车桥提供转矩,或通过在所述车桥上的能量回收而诱导所述车辆减速以便为所述能量存储部件供应能量,
-制动系统,所述制动系统根据减速设定值使所述车辆减速,以及
-上文所述类型的控制装置。
附图说明
通过阅读以下详细说明和附图,本发明的其它特征和优点将更加清楚,在附图中:
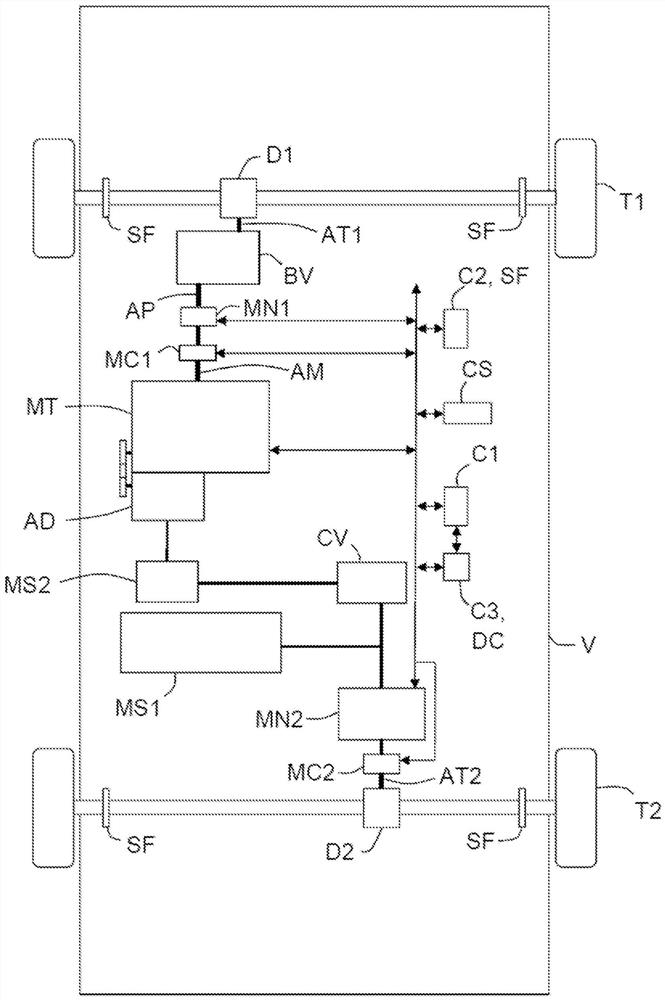
-图1示意性且功能性示出了一种车辆,该车辆包括混合动力传动链的示例、监控计算机、自动化驾驶计算机和根据本发明的控制装置的示例,
-图2A在多个图表中示意性示出了现有技术中的在自动化驾驶阶段的减速策略中涉及的车辆参数的时间(t)变化曲线的示例,
-图2B在多个图表中示意性示出了由根据本发明的减速控制方法实施的在自动化驾驶阶段的减速策略中涉及的车辆参数的时间(t)变化曲线的示例,
-图3示意性示出了实施根据本发明的减速控制方法的算法的示例。
具体实施方式
本发明的目的尤其在于提供一种减速控制方法,以及一种相关联的控制装置DC,所述减速控制方法和控制装置用于在至少部分自动化驾驶式且制动能量回收式车辆V中实施。
作为非限制性示例,在下文中认为车辆V是机动类型的。所述车辆例如是汽车,如图1所示。但本发明并不限于该类型的车辆。本发明实际上涉及至少部分自动化驾驶式的并且包括动力总成(或GMP)的任何类型的陆地车辆,所述动力总成包括至少一个非热力牵引机器,所述至少一个非热力牵引机器与第一车桥联结并且负责产生用于移动的转矩以及回收能量(或转矩)。
应理解到,术语“至少部分自动化(或自主)驾驶式车辆”所指的车辆可在由至少一个自动化驾驶计算机C1自动化驾驶阶段期间被自动化驾驶(部分或完全(没有驾驶员的介入))或在手动驾驶阶段期间被手动驾驶(因此受到驾驶员在方向盘和/或踏板上的介入)。
还应理解到,术语“非热力牵引机器”所指的机器基于存储在能量存储部件中的能量产生使车辆移动的转矩并且例如在减速阶段期间通过能量回收而回收能量(或转矩)以便为该能量存储部件供应能量。这种非热力牵引机器例如能够是电机(或电动机)、液压机、气动机(或空气压缩机)、或飞轮。
作为非限制性示例,在下文中认为GMP的(每个)非热力牵引机器是电机类型的。
还应理解到,本发明所涉及的GMP可包括或是单独一个非热力牵引机器,或是至少两个非热力牵引机器,又或是至少一个热力发动机和至少一个非热力牵引机器(混合动力GMP)。此处术语“热力发动机”所指的发动机消耗燃料或化学产品。因此,热力发动机可尤其是一种反应器、涡轮喷气发动机或化学发动机。
在图1上示意性示出了车辆V,所述车辆包括混合动力GMP式传动链、适于监控(或管理)所述传动链的运行的监控计算机CS、自动化驾驶计算机C1、制动系统SF、以及根据本发明的控制装置DC。
制动系统SF布置成尤其在检测到驱动轮的其中一个丢失附着力(侧滑或打滑)的情况下实施车辆V的制动控制策略。因此,在实施抗侧滑策略时,该制动系统能够是ESC(“Electronic Stability Control(电子稳定控制)”)或ESP(“Electronic StabilityProgram(电子稳定程序)”)类型的,或在实施抗打滑策略时,该制动系统能够是ASR(“Accélération Slip Régulation(加速防滑控制)”)或TCS(“Traction Control System(牵引力控制系统)”)类型的。
GMP此处尤其包括热力发动机MT、第一联结部件MC1、传动比改变部件BV、第一非热力牵引机器MN1、第二联结部件MC2、第二非热力牵引机器MN2、以及第一能量存储部件MS1。
作为GMP的补充,所述传动链尤其包括发动机轴AM以及第一传动轴AT1和第二传动轴AT2。
由于此处认为(每个)非热力牵引机器MN1、MN2是电机类型的,则为其供电的第一能量存储部件MS1布置成存储电能,例如是低电压的(通常为220V或400V又或600V)。
(可选的)热力发动机MT包括曲轴(未图示),所述曲轴与发动机轴AM固定地一体连结以便驱动该发动机轴AM旋转。该热力发动机MT用于经由第一联结部件MC1和传动比改变部件BV为第一车桥T1提供转矩。
例如,第一车桥T1位于车辆V的前部,并且优选地如图所示经由第一差速器(此处为前差速器)D1与第一传动轴AT1联结。但在变型中该第一车桥T1可位于车辆V的后部。
第一联结部件MC1例如可布置成具有离合器的形式。但该第一联结部件还能够是转矩转换器或爪形联接器(crabot)。
传动比改变部件BV例如可布置成具有变速箱的形式。所述传动比改变部件包括:用于接收转矩的第一(或输入)轴AP;以及第二(或输出)轴,所述第二轴用于经由第一轴AP接收该转矩以便将该转矩传送至与该第二轴联结的第一传动轴AT1,所述第一传动轴经由第一差速器D1与车辆V的车轮(此处为前车轮)间接地联结。但在实施变型中,传动比改变部件BV例如可包括至少一个周转齿轮系,该周转齿轮系包括一个、两个或三个同步器。
注意到,由于车辆V是至少部分自动化驾驶式的,传动比改变部件BV是自动化的。
仅作为示意性示例,第一非热力牵引机器MN1此处插设于第一联结部件MC1与传动比改变部件BV之间。因此,同(可选的)热力发动机MT一样,该第一非热力牵引机器此处与第一车桥T1联结。
(可选的)第二联结部件MC2此处负责在监控计算机CS的指令下使第二非热力牵引机器MN2与第二传动轴AT2联结/断联。
作为非限制性示例,(可选的)第二非热力牵引机器MN2此处在经由第二联结部件MC2与第二车桥T2联结时负责基于存储在第一能量存储部件MS1中的能量为第二车桥T2产生转矩。注意到,该第二机器MN2可能不是牵引机器,仅仅负责回收制动能量,又或能够是牵引机器并且负责回收制动能量。
例如,第二车桥T2位于车辆V的后方,并且优选地如图所示经由第二差速器(此处为后差速器)D2与第二传动轴AT2联结。但在上文提到的变型中,该第二车桥T2可位于车辆V的前部。
第二联结部件MC2例如能够是爪形联接器机构或离合器又或液压转矩转换器。所述第二联结部件可采取至少两种联结状态:第一(联结)状态,其中,所述第二联结部件确保第二非热力牵引机器MN2与第二传动轴AT2联结;和第二(断联)状态,其中,所述第二联结部件将第二非热力牵引机器MN2与第二传动轴AT2断联。
还注意到,如图1非限制性所示,传动链此处包括起动器或交流起动器AD,该起动器与热力发动机MT联结并且负责发动该热力发动机MT以便使该热力发动机能够起动。该发动由于电能而实施,所述电能例如非限制性地如图所示存储在第二存储部件MS2中。
这些第二存储部件MS2可布置成具有超低电压(例如12V、24V或48V)电池的形式。该第二存储部件MS2例如可为车辆V的电气设备所连接的车载网络供电。注意到,第二存储部件MS2可非限制性地如图所示经由DC/DC类型的转换器CV与第一能量存储部件MS1以及与第一非热力牵引机器MN1和第二非热力牵引机器MN2联结,以便能够被充电。
可由监控计算机CS控制(可选的)热力发动机MT、第一非热力牵引机器MN1、(可选的)第二非热力牵引机器MN2、第一联结部件MC1、(可选的)第二联结部件MC2以及传动比改变部件BV的运行。
自动化驾驶计算机C1负责在自动化(或自主)驾驶阶段期间控制车辆V的(至少部分的)驾驶。所述自动化驾驶计算机与监控计算机CS永久地通讯。另外,所述自动化驾驶计算机任选地是ADAS(“Advanced Driver Assistance System(高级驾驶辅助系统)”)类型的。
当自动化驾驶计算机C1决定使车辆V减速时,该自动化驾驶计算机开始于根据外部约束(例如分隔车辆V与先于该车辆V的另一车辆的当前距离、车辆V相对于先于该车辆V的另一车辆的当前相对速度、行驶有车辆V的道路部分上检测到障碍物的存在、或由驾驶员选择的并且限定驾驶员希望车辆V行驶的速度的速度设定值)为车辆V识别目标加速度。然后,自动化驾驶计算机C1将该加速度分配成用于GMP的转矩设定值以及用于制动系统SF(更确切地用于该制动系统的制动计算机C2)的减速设定值。
为了实施该分配,自动化驾驶计算机C1需考虑在所考虑的时刻由GMP实施转矩的能力(即,GMP所允许的允许最小转矩和最大转矩)。
传输至制动计算机C2的减速设定值与由驾驶员在所考虑的时刻通过作用在制动踏板上所要求的可能制动相协调。能够或是由制动系统SF确保的液压制动,或是由通过第一非热力牵引机器MN1(以及任选地此处为第二非热力牵引机器MN2)进行的再生制动,来实施所述减速。当GMP至少经由第一非热力牵引机器MN1通知制动计算机C2可用的能量回收势能时,再生制动变得可能。然后,根据转矩(等于该能量回收势能),可请求GMP至少借助于第一非热力牵引机器MN1以负转矩实施所述减速的一部分。
如前面提到的,本发明提供了一种用于在车辆V中实施的控制方法以在自动化驾驶阶段期间存在减速需要时控制所述减速。
该(控制)方法可至少部分地由控制装置DC实施,所述控制装置为此包括至少一个控制计算机C3。控制计算机C3例如可包括至少一个数字信号处理器(或DSP(“DigitalSignal Processor”)),所述至少一个数字信号处理器任选地与至少一个存储器相关联。
在图1上非限制性所示的示例中,控制计算机C3独立于监控计算机CS和自动化驾驶计算机C1,同时与这些计算机CS和C1联结以便彼此交换消息。但在实施变型中,控制计算机C3能够是监控计算机CS又或是自动化驾驶计算机C1的一部分。
根据本发明的辅助方法包括步骤10-50,每当在车辆V的自动化驾驶阶段期间存在减速需要时就实施该步骤。这种需要可通过由自动化驾驶计算机C1执行的对车辆V的约束的分析而得到或通过车辆V的驾驶员的使该车辆V减速的意愿(例如通过在车辆V的人机界面上的动作)而得到。
下面参考图2B所示的车辆参数的时间(t)变化曲线示例的多个图表来描述所述方法的步骤10-50,所述参数在自动化驾驶阶段期间的减速策略中涉及。该多个图表类似于相邻的图2A上示出的多个图表,因此涉及以下参数(从顶部到底部):
-车辆的以km/h为单位的速度v(曲线c1'),
-GMP(曲线c2')或制动系统(曲线c3')的操控请求dp的状态,其中,顶部状态表示“是”(或“真”),底部状态表示“否”(或“假”),
-传输至GMP的转矩设定值cc(以Nm为单位)(曲线c4')以及允许的最小转矩(曲线c5'),
-传输至制动系统的减速设定值cd(以m/s
-制动系统的主汽缸的压力pm(以巴为单位)(曲线c7'),
-车辆a的所生成的总减速设定值(以m/s
在(所述方法的)步骤10-50中,根据允许的最小转矩c5'以及至少一个约束确定(用于GMP)的转矩设定值c4'直到由GMP有效地达到所述允许的最小转矩c5'。另外,根据该/每个约束并且基于经选择的先于第二时刻的第一时刻t1'确定(用于制动计算机C2)的减速设定值c6',在所述第二时刻有效地达到(或完全地利用)所述允许的最小转矩c5',以便在第一时刻t1'与第二时刻t2'之间通过(由GMP进行的)能量回收以及制动系统SF得到所述减速。
换句话说,通过现有技术中的策略,由通过GMP实施的回收性制动进行减速直到时刻t1,然后基于该时刻t1触发由制动系统SF进行的减速,通过根据本发明的方法,由通过GMP实施的回收性制动进行减速直到第一时刻t1',然后在该第一时刻t1'与第二时刻t2'之间继续实施由通过GMP实施的回收性制动进行的减速,并且开始由制动系统SF进行的减速,并且基于该第二时刻t2'继续实施由单独的制动系统SF进行的减速。
通过本发明,现在因此具有三个阶段而不是两个阶段:在t1'之前的第一阶段,在所述第一阶段中制动是纯回收性的(仅通过GMP);(混合的)第二阶段,在所述第二阶段中制动同时地是回收性的(通过GMP)和液压的(通过制动系统SF);以及第三阶段,在所述第三阶段中,制动是纯液压的(仅通过制动系统SF)。在确保在第三阶段中的仅一种制动之前,(混合的)第二阶段能够同时地结束对(在GMP中可用的)允许的最小转矩c5'的全部的利用并且能够提前地触发制动系统SF的预配置使得该制动系统开始补充于GMP进行制动。这非常有利地能够避免制动中的不连续性和/或液压泵的激活噪声。
注意到,在步骤10-50中,(控制装置DC)可在第一时刻t1'和第二时刻t2'之间确定(用于GMP的)转矩设定值c4',所述转矩设定值小于或等于在第一时刻t1'之前确定的每个转矩设定值。这实际上能够逐步地减小回收性制动在整个制动中的比例。
在该可选方式的情况下,在步骤10-50中,(控制装置DC)可在第一时刻t1'和第二时刻t2'之间确定连续增长的减速设定值(除了驾驶员介入的情况)。这能够逐步地增加液压制动的比例以使制动的不连续性最小化并且如果可能的话阻止该不连续性。为此,传输至制动计算机C3的所有的第一减速设定值c6'非常小以便触发制动系统SF的预配置并且向所述制动系统通知更大的减速设定值c6'即将到来。
还注意到,在步骤10-50中,(控制装置DC)可根据GMP的转矩相对于允许的最小转矩c5'的使用百分比选择第一时刻t1'。作为示例,该百分比可在70%与90%之间。
在实施变型中,在步骤10-50中,(控制装置DC)可根据第二时刻t2'(在所述第二时刻允许的最小转矩c5'全部被利用于回收性制动)选择第一时刻t1'。在该情况下,在第一时刻t1'与第二时刻t2'之间的偏差被预限定。
还注意到,由控制计算机C3考虑的约束例如可选自:驾驶员的减速意愿(例如通过在车辆V的人机界面上的动作)、分隔车辆V与先于该车辆的另一车辆的当前距离、车辆V相对于先于该车辆的另一车辆的当前相对速度、行驶有车辆V的道路部分上检测到障碍物的存在、以及由驾驶员选择的并且限定驾驶员希望车辆V行驶的速度的速度设定值。
图3上示意性示出了实施上文所述的控制方法的步骤的算法的示例。
在第一子步骤10中,(自动化驾驶计算机)向控制计算机C3指示减速需要。
在第二子步骤20中,(控制计算机C3)根据允许的最小转矩c5'和至少一个约束确定转矩设定值c4',所述转矩设定值用于GMP并且对应于该需要。
在第三子步骤30中,(控制计算机C3)确定第二时刻t2',在该第二时刻达到(或完全地利用)允许的最小转矩c5'。然后,(控制计算机C3)根据该第二时刻t2'确定第一时刻t1'。
在第四子步骤40中,(控制计算机C3)根据每个约束在第一时刻t1'和第二时刻t2'之间确定(用于GMP的)连续的转矩设定值sc4'以及(用于制动计算机C2的)连续的减速设定值c6',以便通过(由GMP进行的)能量回收以及制动系统SF得到所述减速。
在第五子步骤50中,(控制计算机C3)根据每个约束基于第二时刻t2'仅确定(用于制动计算机C2的)连续的减速设定值c6',以便仅通过制动系统SF得到所述减速。
注意到,本发明还提供了一种电脑程序产品,所述电脑程序产品包括一组指令,所述一组指令在由电路(或硬件)类型的处理部件(例如控制计算机C3)执行时适于实施上文所述的控制方法以控制车辆V在自动化(或自主)驾驶阶段期间的减速。
还注意到,在图1上控制装置DC被非常示意性示出为仅具有控制计算机C3。该控制装置DC可采取壳体的形式,所述壳体包括集成(或印制)电路,又或通过有线或无线连接来联接的多个集成(或印制)电路。“集成(或印制)电路”是指适于执行至少一个电气或电子操作的任何类型的装置。如上文所述,该控制装置DC可包括:至少一个处理器,例如数字信号处理器(或DSP(Digital Signal Processor));活存储器,用于存储由该处理器实施上文所述的控制方法的指令;以及大容量存储器,用于存储获得的(最终)数据和/或在计算中介入的可能的中间数据。控制计算机C3至少接收限定约束的数据、允许的最小转矩以及减速需要,以便任选地以本身已知的方式进行转格式和/或解调和/或放大之后在计算中使用。控制装置DC还可包括:输入界面,用于至少接收限定约束的数据、允许的最小转矩以及所述减速需要;和输出界面,用于传输计算的结果,尤其是转矩设定值和减速设定值。
所述控制方法的步骤的一个或多个子步骤可由不同的部件执行。因此,所述控制方法可由多个处理器、活存储器、大容量存储器、输入界面、输出界面和/或数字信号处理器实施。在这些情况中,控制装置DC可分散在局域网(例如彼此联接的多个处理器)或广域网内部。
由于本发明,经由制动系统实施的制动预测能够更好地管理液压制动与回收性(或再生)制动之间的分配,并且能够实现过滤(用于泵的)压力设定值所必须的批准策略以实施液压制动。另外,通过具有电池寿命上的优点而利用于GMP内部的能量优化策略的分配,对允许的最小转矩的全部范围的利用能够更好地表示发送至非热力机器的(再生制动的)转矩设定值。
- 用于自动化驾驶式车辆和非热力牵引机器的在混合阶段控制减速的方法和装置
- 用于在换挡阶段控制混合动力车辆的方法