一种桨距控制器的增量式PID动态调节控制方法
文献发布时间:2023-06-19 13:27:45
技术领域
本发明涉及风力发电技术领域,特别涉及一种桨距控制器的增量式PID动态调节控制方法。
背景技术
随着低风速、低成本风电机组的开发,机组风轮的直径不断增加,风电机组的塔架在满足设计要求的前提下也不断的轻量化,因此需要对风轮加以有效控制以减低载荷。
目前,现有的桨距控制器中通常采用普通数字增量式PID控制算法,由于普通数字增量式PID控制算法中的比例系数Kp和积分系数Ki均为固定的常数,因此,加入微分系数Kd必然会引起系统的振荡。在风电机组的实际运行环境中,尤其是极端风况下,风速风向在短时间内会发生很大变化,若桨距控制器单纯依靠普通数字增量式PID控制算法,在误差突变的时候很难在短时间有效调节桨距,从而会导致风力发电机超速停机,影响风电机组的发电量,而且,由于风电机组在极端风况下存在较大的偏航误差角,因此,在停机过程中,还可能会出现轮毂和偏航不平衡而导致的极限载荷,容易导致风电机组的零部件损坏。
发明内容
本发明的目的是针对现有技术的不足,提供一种桨距控制器的增量式PID动态调节控制方法,其能抑制风电机组在极端风况下出现发电机转速超速,减少由于发电机超速停机导致的发电量损失。
本发明的技术方案是:一种桨距控制器的增量式PID动态调节控制方法,步骤如下:
1)设定参数值:根据风电机组的规格和风电机组所处风场的环境,设定启用动态调节的转速门限系数K
2)计算调节系数:根据传感器采集的发电机滤波转速G
U
U
式中,U
3)计算调节增益:根据步骤2)的调节系数计算比例项调节增益和积分项调节增益,
式中,P
4)增量式PID动态调节控制:以P
5)输出变桨角度:根据步骤4)的调整量Δu
式中,u
进一步的,步骤4)按以下公式进行增量式PID控制:
式中,Δu
e
e
e
α表示不完全微分系数;
T
进一步的,步骤5)中根据风电机组的最大变桨速度限制Δu
采用上述技术方案:通过对比例系数和微分系数进行动态调节,实现对增量式PID控制的动态调节,采用闭环控制使风电机组能在风速风向短时间突变工况下有效抑制发电机转速超速,从而避免出现轮毂和偏航不平衡而导致极限载荷情况,降低风电机组的机械载荷,尤其是能在极端风况下,能避免转速超限对发电机、齿轮箱、传动链、塔架等部件带来极限冲击;同时,减少由于发电机超速停机导致的发电量损失,提高风电机组的发电量;而且,可以根据发电机的超调量大小实现增量式PID控制中比例系数和积分系数的动态调整,降低塔架底部和塔架顶部的极限载荷。
下面结合说明书附图和具体实施例对本发明作进一步说明。
附图说明
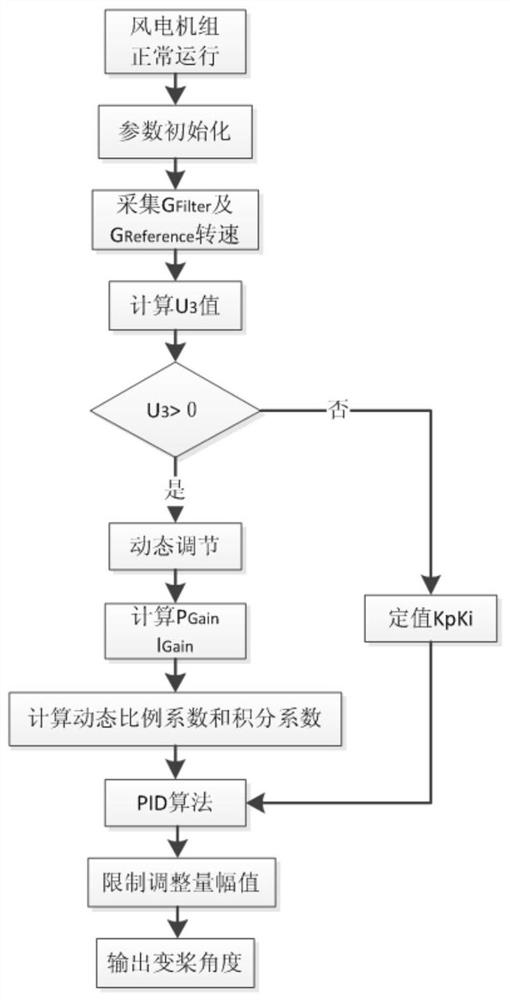
图1为本发明的流程图;
图2为本发明实施例的风电机组所处风场的风速风向图;
图3为本发明实施例的风电机组的发电机转速对比图;
图4为本发明实施例的风电机组的变桨速度对比图;
图5为本发明实施例的风电机组的桨角对比图;
图6为本发明实施例的风电机组的塔架底部前后推力、左右推力的合力对比图;
图7为本发明实施例的风电机组的塔架顶部前后推力、左右推力的合力对比图;
图8为本发明实施例的风电机组的功率对比图;
图9为本发明实施例的比例系数和积分系数的动态调节图。
具体实施方式
参见图1至图9,一种桨距控制器的增量式PID动态调节控制方法的实施例,本实施例所采用的风电机组的基础数据如下表所示:
按以下步骤对风电机组的变桨角度进行增量式PID动态调节控制:
1)设定参数值:根据风电机组的规格和风电机组所处风场的环境,设定启用动态调节的转速门限系数K
2)计算调节系数:根据传感器采集的发电机滤波转速G
U
U
式中,U
3)计算调节增益:根据步骤2)的调节系数计算比例项的调节增益和积分项的调节增益:
式中,P
由上式可知,若U
4)增量式PID控制:以P
由于比例项的调节增益P
本实施例根据风电机组的规格和所处风场的环境,设置G
然后,按以下公式进行增量式PID控制得到调整量Δu
式中,Δu
e
e
e
T
α表示不完全微分系数;
D
5)计算变桨角度:根据风电机组的最大变桨速度限制Δu
式中,u
本实施例的风电机组在极端风况下,按以上方法进行增量式PID动态调节控制后的结果如下:
1.如图3所示,采用本发明的控制方法,风电机组的发电机转速明显改善,能有效避免发电机转速超限停机。
2.如图4所示,变桨速度明显增加,以及如图5所示,叶片角度随变桨速度的增加而增大,使风电机组的叶片快速收桨,从而让风轮吸收的风能减少,由此减小为发电机运行提供的能量,达到避免发电机超速停机的目的。
3.如图6所示,采用本发明的控制方法,通过风电机组的塔架底部前后推力、左右推力的合力,能够得出塔架底部极限载荷降低约3.3%。
4.如图7所示,采用本发明的控制方法,风电机组的塔架顶部前后推力、左右推力的合力,能够得出塔架顶部极限载荷降低约12%。
5.如图8所示,采用本发明的控制方法,由于风电机组的发电机转速没有超限,因此即使在极端风况下仍然能够持续发电,从而提高风电机组的发电量和发电效果。
本发明通过增量式PID控制的比例系数和积分系数进行动态调节,实现对增量式PID控制的动态调节,采用闭环控制,使风电机组能在风速风向短时间突变工况下有效抑制发电机转速超速,从而避免出现轮毂和偏航不平衡而导致极限载荷情况,降低风电机组的机械载荷,尤其是能在极端风况下,能有效避免转速超限对发电机、齿轮箱、传动链、塔架等部件带来极限冲击。而且,采用本控制方法,即使在极端风况下,仍然能使风电机组持续发电,减少由于发电机超速停机导致的发电量损失,提高风电机组的发电量和发电效果;此外,还可以根据发电机的超调量大小实现增量式PID控制中比例系数和积分系数的动态调整,使比例系数和积分系数快速响应发电机的转速变化,降低塔架底部和塔架顶部的极限载荷。
- 一种桨距控制器的增量式PID动态调节控制方法
- 一种风力发电机组桨距控制器的附加比例项增量式PID控制方法