精准调整ADC相机的方法、装置、设备及计算机存储介质
文献发布时间:2023-06-19 13:48:08
技术领域
本发明实施例涉及半导体技术领域,尤其涉及一种精准调整ADC相机的方法、装置、设备及计算机存储介质。
背景技术
电子级单晶硅棒作为一种半导体材料,一般用于制造集成电路和其他电子元件。目前常见的单晶硅棒的生长方法是切克劳斯基(Czochralski)法,又或被称之为直拉法,即在单晶炉中,使籽晶浸入容置于坩埚的熔硅液中,在转动籽晶及坩埚的同时提拉籽晶,以在籽晶末端依次进行引晶、放肩、转肩、等径及收尾等工艺操作,从而获得单晶硅棒。目前,为了获得满足不同用途的电子级晶圆需要工艺人员利用不同的热场以及工艺条件来制备不同的单晶硅棒。
等径阶段是长晶过程中极为重要的工艺过程,也是保证单晶硅棒品质的关键,而在等径阶段的初期快速且有效地达到所需要的单晶硅棒的生长直径是十分必要的。然而由于单晶硅棒的不同需求,通常需要对单晶炉热场配件进行一定程度地调整。由于热场配件的调整是为了保证单晶硅棒的生长直径,因此随着热场配件的调整直径自动控制(Automatic Diameter Control,ADC)相机也要做出相应地调整。在常规技术方案中,对于ADC相机的调整位置,一般是在将要进入或者已经进入等径阶段时通过实际标尺测量得到,在这种情况下ADC相机的调整具有一定的延迟性并且需要反复进行调整才能将ADC相机调整至设定的位置以监测单晶硅棒的生长直径。
发明内容
有鉴于此,本发明实施例期望提供一种精准调整ADC相机的方法、装置、设备及计算机存储介质;能够在调整热场配件后精确且及时确定ADC相机的调整位置,以使得单晶硅棒从等径阶段初期快速稳定地进入等径阶段,从而提升单晶硅棒等径阶段初期的品质。
本发明实施例的技术方案是这样实现的:
第一方面,本发明实施例提供了一种精准调整ADC相机的方法,所述方法包括:
在当前单晶硅棒拉制前,通过分别比较所述当前单晶硅棒与上一炉单晶硅棒对应的热场配件的变化,获取直径自动控制ADC相机距离熔体固液界面的高度变化值;
基于所述高度变化值与所述ADC相机的水平位移量之间的几何关系,根据所述高度变化值,获取所述ADC相机的水平位移量;其中,所述水平位移量为第一水平位移量或第二水平位移量;
根据所述ADC相机的水平位移量,水平移动所述ADC相机至目标位置。
第二方面,本发明实施例提供了一种精准调整ADC相机的装置,所述装置包括:第一获取部分,第二获取部分以及移动部分;其中,
所述第一获取部分,经配置在在当前单晶硅棒拉制前,通过分别比较所述当前单晶硅棒与上一炉单晶硅棒对应的热场配件的变化,获取直径自动控制ADC相机距离熔体固液界面的高度变化值;
所述第二获取部分,经配置为基于所述高度变化值与所述ADC相机的水平位移量之间的几何关系,根据所述高度变化值,获取所述ADC相机的水平位移量;其中,所述水平位移量为第一水平位移量或第二水平位移量;
所述移动部分,经配置为根据所述ADC相机的水平位移量,水平移动所述ADC相机至目标位置。
第三方面,本发明实施例提供了一种精准调整ADC相机的设备,其特征在于,所述设备包括:通信接口,存储器和处理器;各个组件通过总线系统耦合在一起;其中,
所述通信接口,用于在与其他外部网元之间进行收发信息过程中,信号的接收和发送;
所述存储器,用于存储能够在所述处理器上运行的计算机程序;
所述处理器,用于在运行所述计算机程序时,执行第一方面所述精准调整ADC相机的方法步骤。
第四方面,本发明实施例提供了一种计算机存储介质,所述计算机存储介质存储有精准调整ADC相机的程序,所述精准调整ADC相机的程序被至少一个处理器执行时实现第一方面所述精准调整ADC相机的方法的步骤。
本发明实施例提供了一种精准调整ADC相机的方法、装置、设备及计算机存储介质;该方法在当前单晶硅棒拉制前,通过比较当前单晶硅棒与上一炉单晶硅棒对应的热场配件的变化,以获取ADC相机距离熔体固液界面的高度变化值;并再此基础上基于高度变化值与ADC相机的水平位移量之间的几何关系,并根据高度变化值,获取ADC相机的水平位移量,最终水平移动所述ADC相机至目标位置,以便于在调整热场配件后精确且及时确定ADC相机的调整位置,从而使得单晶硅棒从等径阶段初期快速稳定地进入等径阶段,从而提升单晶硅棒等径阶段初期的品质。
附图说明
图1为本发明实施例提供的一种单晶炉结构示意图;
图2为本发明实施例提供的一种单晶炉热场配件位置变化示意图;
图3为本发明实施例提供的一种精准调整ADC相机的方法流程示意图;
图4为本发明实施例提供的ADC相机距离熔体液面高度变化值与ADC相机水平位移量之间的几何关系示意图;
图5为本发明实施例提供的ADC相机转动角度Δθ示意图;
图6为本发明实施例提供的ADC相机水平移动至目标位置示意图;
图7为本发明实施例提供的一种精准调整ADC相机的装置组成示意图;
图8为本发明实施例提供的一种精准调整ADC相机的设备硬件结构示意图。
具体实施方式
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述。
参见图1,其示出了能够实现本发明实施例技术方案的单晶炉1,该单晶炉1可以包括:炉体10,炉体10中设有加热装置和提拉装置;加热装置包括石墨坩埚20、石英坩埚30以及加热器40等,其中,石英坩埚30用于盛放硅原料,例如多晶硅。硅原料在石英坩埚30中被加热熔化为熔体MS,石墨坩埚20包裹在石英坩埚30的外侧,用于在加热过程中对石英坩埚30提供支撑,加热器40设置在石墨坩埚20的外侧。石英坩埚30上方设置有热屏50,热屏50悬挂于保温盖板60上,其中,热屏50具有下伸的环绕单晶硅棒生长区域的倒锥形屏装物,可阻断加热器40和高温熔体MS对生长的单晶硅棒的直接热辐射,以降低单晶硅棒的温度。同时,热屏50还能够使下吹的保护气体集中直接喷到生长界面附近,进一步增强单晶硅棒的散热。坩埚轴70设置在石墨坩埚20的底部,坩埚轴70的底部设有坩埚轴驱动装置(图中未示出),使坩埚轴70能够带动石英坩埚30进行旋转。
需要说明的是,图1所示的拉晶炉1结构并非具体限定,为了清楚地阐述本发明实施例的技术方案从而省略地没有示出用于实施直拉法制备单晶硅棒所需要的其他部件。基于图1所示的拉晶炉1,在炉体10的上方,还可以开设有观测窗口80,以供ADC相机2来监测单晶硅棒的生长直径。
利用上述单晶炉1进行单晶硅棒的制备时,对于不同需求的单晶硅棒需要对热场配件进行调整,例如如图2所示,拉制上一炉单晶硅棒时单晶炉1内的热场配件如图2中实线位置所示,而对于不同需求的当前单晶硅棒而言,其单晶炉1内的热场配件如图2中虚线位置所示。可以理解地,对于上一炉单晶硅棒和当前单晶硅棒而言,单晶炉1内的热场配件的调整是为了满足不同需求的基础上保证拉制的单晶硅棒的生长直径一致。可以理解地,在当前单晶硅棒对应的热场配件进行调整变化后,如图2所示,熔体MS固液界面的高度位置也会发生变化,也就是说ADC相机距离熔体MS固液界面的高度发生了变化,因此,为了保证当前单晶硅棒的生长直径与上一炉单晶硅棒的生长直径一致,ADC相机2的位置也需要调整,例如如图2中ADC相机2从实线位置水平移动至虚线位置。但是在常规的技术方案中,在当前单晶硅棒即将进入等径生长阶段或者已经进入等径生长阶段时会通过实际标尺来测量ADC相机2的移动位移;可以理解地,由于实际标尺的测量具有一定的延迟性,并且需要根据测量数据反复地调整ADC相机2,因此会对单晶硅棒的生长直径的控制精度产生影响。
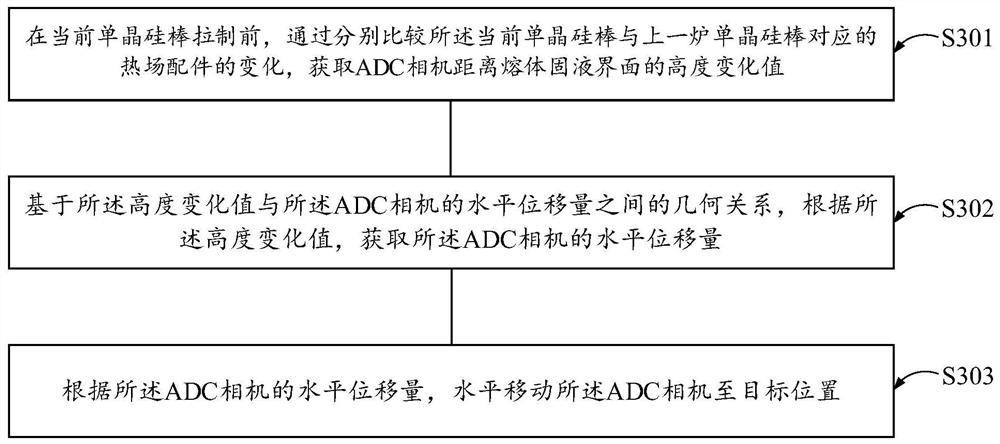
因此,基于上述阐述的内容,参见图3,其示出了本发明实施例提供的一种精准调整ADC相机的方法,该方法具体包括:
S301、在当前单晶硅棒拉制前,通过分别比较所述当前单晶硅棒与上一炉单晶硅棒对应的热场配件的变化,获取ADC相机距离熔体固液界面的高度变化值;
S302、基于所述高度变化值与所述ADC相机的水平位移量之间的几何关系,根据所述高度变化值,获取所述ADC相机的水平位移量;其中,所述水平位移量为第一水平位移量或第二水平位移量;
S303、根据所述ADC相机的水平位移量,水平移动所述ADC相机至目标位置。
对于图3所示的技术方案,在当前单晶硅棒拉制前,通过比较当前单晶硅棒与上一炉单晶硅棒对应的热场配件的变化,以获取ADC相机距离熔体固液界面的高度变化值;并再此基础上基于高度变化值与ADC相机的水平位移量之间的几何关系,并根据高度变化值,获取ADC相机的水平位移量,最终水平移动所述ADC相机至目标位置,以便于在调整热场配件后精确且及时确定ADC相机的调整位置,从而使得单晶硅棒从等径阶段初期快速稳定地进入等径阶段,从而提升单晶硅棒等径阶段初期的品质。
对于图3所示的技术方案,在一些示例中,所述当前单晶硅棒与上一炉单晶硅棒对应的热场配件的变化,包括:
拉制所述当前单晶硅棒以及所述上一炉单晶硅棒时保温盖板在单晶炉中的高度变化、热屏的长度变化以及熔体的液位间距变化。
对于图3所示的技术方案,在一些示例中,所述在当前单晶硅棒拉制前,通过分别比较所述当前单晶硅棒与上一炉单晶硅棒对应的热场配件的变化,获取ADC相机距离熔体固液界面的高度变化值,包括:
通过比较所述当前单晶硅棒与上一炉单晶硅棒对应的热场配件的变化,分别获取所述保温盖板的高度变化值Δh
在拉制所述当前单晶硅棒时,根据所述保温盖板的高度变化值Δh
可以理解地,如图2所示,在当前单晶硅棒的实际拉制过程中,由于当前单晶硅棒与上一炉单晶硅棒之间存在产品需求差异,因此单晶炉1中的热场配件也要做出相应地调整,在这种情况下会导致熔体MS固液界面的高度位置发生变化,进而使得ADC相机2距离熔体固液界面的高度也随之发生变化。具体来说,当支撑部件的高度变化时会导致保温盖板60位置的变化为Δh
此外,需要说明的是,在本发明实施例中规定熔体MS固液界面竖直向上移动时的位移为正位移,以及ADC相机2水平向右移动时的位移为正位移;相反地,熔体MS固液界面竖直向下移动时的位移为负位移,以及ADC相机2水平左移动时的位移为负位移。
优选地,对于图3所示的技术方案,在一些示例中,所述基于所述高度变化值与所述ADC相机的水平位移量之间的几何关系,根据所述高度变化值,获取所述ADC相机的水平位移量,包括:
根据所述高度变化值与所述ADC相机的第一水平位移量之间的几何关系,获得所述高度变化值ΔH与所述ADC相机的第一水平位移量ΔX
根据所述第一对应关系以及所述高度变化值ΔH,获取所述ADC相机的第一水平位移量ΔX
可以理解地,当ADC相机2距离熔体MS固液界面的高度位置发生变化后,若要保持ADC相机2监测的单晶硅棒的生长直径不发生变化,就需要调整ADC相机2的水平位置以保证ADC相机2监测到的单晶硅棒的生长直径保持一致。基于此,如图4为图2中黑色圆形区域的局部放大图,由图4中的几何关系可知,ADC相机2的第一水平位移量ΔX
对于图3所示的技术方案,在一些示例中,所述基于所述高度变化值与所述ADC相机的水平位移量之间的几何关系,根据所述高度变化值,获取所述ADC相机的水平位移量,包括:
当所述ADC相机在水平方向上转动角度Δθ后,根据所述高度变化值与所述ADC相机的第二水平位移量之间的几何关系,获得所述高度变化值ΔH与所述ADC相机的第二水平位移量ΔX
根据所述第二对应关系以及所述高度变化值,获取所述ADC相机的第二水平位移量。
需要说明的是,当前述ADC相机2的水平位移ΔX
为了避免上述情况的发生,在本发明实施例的具体实施过程中可以通过在水平方向转动ADC相机2的角度为Δθ来确定ADC相机的第二水平位移量。首先,如图5所示,ADC相机2在水平方向转动一定的角度Δθ,再根据图5所示的几何关系以及ΔH计算获得ADC相机2的第二水平位移量ΔX
需要说明的是,在ADC相机2的镜头中心位置设置有十字光标,因此在只通过水平移动ADC相机2的水平位移量为ΔX
对于图3所示的技术方案,在一些示例中,所述根据所述ADC相机的水平位移量,水平移动所述ADC相机至目标位置,包括:
根据所述ADC相机的第一水平位移量或第二水平位移量,水平移动所述ADC相机至目标位置。
基于前述相同的技术方案构思,下面通过表1具体示出了ADC相机2水平位移量的计算值与试验值对比结果。
表1
基于前述技术方案相同的发明构思,参见图7,其示出了本发明实施例提供的一种精准调整ADC相机的装置70,所述装置70包括:第一获取部分701,第二获取部分702以及移动部分703;其中,
所述第一获取部分701,经配置在当前单晶硅棒拉制前,通过分别比较所述当前单晶硅棒与上一炉单晶硅棒对应的热场配件的变化,获取ADC相机距离熔体固液界面的高度变化值;
所述第二获取部分702,经配置为基于所述高度变化值与所述ADC相机的水平位移量之间的几何关系,根据所述高度变化值,获取所述ADC相机的水平位移量;其中,所述水平位移量为第一水平位移量或第二水平位移量;
所述移动部分703,经配置为根据所述ADC相机的水平位移量,水平移动所述ADC相机至目标位置。
在一些示例中,所述第一获取部分701,经配置为:
拉制所述当前单晶硅棒以及所述上一炉单晶硅棒时保温盖板在单晶炉中的高度变化、热屏的长度变化以及熔体的液位间距变化。
在一些示例中,所述第一获取部分701,还经配置为:
通过比较所述当前单晶硅棒与所述上一炉单晶硅棒对应的热场配件的变化,分别获取所述保温盖板的高度变化值Δh
在拉制所述当前单晶硅棒时,根据所述保温盖板的高度变化值Δh
在一些示例中,所述第二获取部分702,经配置为:
根据所述高度变化值与所述ADC相机的第一水平位移量之间的几何关系,获得所述高度变化值ΔH与所述ADC相机的第一水平位移量ΔX
根据所述第一对应关系以及所述高度变化值ΔH,获取所述ADC相机的第一水平位移量ΔX
在一些示例中,所述第二获取部分702,经配置为:
当所述ADC相机在水平方向上转动角度Δθ后,根据所述高度变化值与所述ADC相机的第二水平位移量之间的几何关系,获得所述高度变化值ΔH与所述ADC相机的第二水平位移量ΔX
根据所述第二对应关系以及所述高度变化值,获取所述ADC相机的第二水平位移量。
在一些示例中,所述移动部分703,经配置为:
根据所述ADC相机的第一水平位移量或第二水平位移量,水平移动所述ADC相机至目标位置。
可以理解地,在本实施例中,“部分”可以是部分电路、部分处理器、部分程序或软件等等,当然也可以是单元,还可以是模块也可以是非模块化的。
另外,在本实施例中的各组成部分可以集成在一个处理单元中,也可以是各个单元单独物理存在,也可以两个或两个以上单元集成在一个单元中。上述集成的单元既可以采用硬件的形式实现,也可以采用软件功能模块的形式实现。
所述集成的单元如果以软件功能模块的形式实现并非作为独立的产品进行销售或使用时,可以存储在一个计算机可读取存储介质中,基于这样的理解,本实施例的技术方案本质上或者说对现有技术做出贡献的部分或者该技术方案的全部或部分可以以软件产品的形式体现出来,该计算机软件产品存储在一个存储介质中,包括若干指令用以使得一台计算机设备(可以是个人计算机,服务器,或者网络设备等)或processor(处理器)执行本实施例所述方法的全部或部分步骤。而前述的存储介质包括:U盘、移动硬盘、只读存储器(Read Only Memory,ROM)、随机存取存储器(Random Access Memory,RAM)、磁碟或者光盘等各种可以存储程序代码的介质。
因此,本实施例提供了一种计算机存储介质,所述计算机存储介质存储有精准调整ADC相机的程序,所述精准调整ADC相机的程序被至少一个处理器执行时实现上述技术方案中所述精准调整ADC相机的方法步骤。
根据上述精准调整ADC相机的装置70以及计算机存储介质,参见图8,其示出了本发明实施例提供的一种能够实施上述精准调整ADC相机的装置70的计算设备80的具体硬件结构,该计算设备80可以为无线装置、移动或蜂窝电话(包含所谓的智能电话)、个人数字助理(PDA)、视频游戏控制台(包含视频显示器、移动视频游戏装置、移动视频会议单元)、膝上型计算机、桌上型计算机、电视机顶盒、平板计算装置、电子书阅读器、固定或移动媒体播放器等。该计算设备80包括:通信接口801,存储器802和处理器803;各个组件通过总线系统804耦合在一起。可理解,总线系统804用于实现这些组件之间的连接通信。总线系统804除包括数据总线之外,还包括电源总线、控制总线和状态信号总线。但是为了清楚说明起见,在图8中将各种总线都标为总线系统804。其中,
所述通信接口801,用于在与其他外部网元之间进行收发信息过程中,信号的接收和发送;
所述存储器802,用于存储能够在所述处理器上运行的计算机程序;
所述处理器803,用于在运行所述计算机程序时,执行上述方案中所述精准调整ADC相机的方法步骤。
可以理解,本发明实施例中的存储器802可以是易失性存储器或非易失性存储器,或可包括易失性和非易失性存储器两者。其中,非易失性存储器可以是只读存储器(Read-Only Memory,ROM)、可编程只读存储器(Programmable ROM,PROM)、可擦除可编程只读存储器(Erasable PROM,EPROM)、电可擦除可编程只读存储器(Electrically EPROM,EEPROM)或闪存。易失性存储器可以是随机存取存储器(Random Access Memory,RAM),其用作外部高速缓存。通过示例性但不是限制性说明,许多形式的RAM可用,例如静态随机存取存储器(Static RAM,SRAM)、动态随机存取存储器(Dynamic RAM,DRAM)、同步动态随机存取存储器(Synchronous DRAM,SDRAM)、双倍数据速率同步动态随机存取存储器(Double Data RateSDRAM,DDRSDRAM)、增强型同步动态随机存取存储器(Enhanced SDRAM,ESDRAM)、同步连接动态随机存取存储器(Synchlink DRAM,SLDRAM)和直接内存总线随机存取存储器(DirectRambus RAM,DRRAM)。本文描述的系统和方法的存储器802旨在包括但不限于这些和任意其它适合类型的存储器。
而处理器803可能是一种集成电路芯片,具有信号的处理能力。在实现过程中,上述方法的各步骤可以通过处理器803中的硬件的集成逻辑电路或者软件形式的指令完成。上述的处理器803可以是通用处理器、数字信号处理器(Digital Signal Processor,DSP)、专用集成电路(Application Specific Integrated Circuit,ASIC)、现场可编程门阵列(Field Programmable Gate Array,FPGA)或者其他可编程逻辑器件、分立门或者晶体管逻辑器件、分立硬件组件。可以实现或者执行本发明实施例中的公开的各方法、步骤及逻辑框图。通用处理器可以是微处理器或者该处理器也可以是任何常规的处理器等。结合本发明实施例所公开的方法的步骤可以直接体现为硬件译码处理器执行完成,或者用译码处理器中的硬件及软件模块组合执行完成。软件模块可以位于随机存储器,闪存、只读存储器,可编程只读存储器或者电可擦写可编程存储器、寄存器等本领域成熟的存储介质中。该存储介质位于存储器802,处理器803读取存储器802中的信息,结合其硬件完成上述方法的步骤。
可以理解的是,本文描述的这些实施例可以用硬件、软件、固件、中间件、微码或其组合来实现。对于硬件实现,处理单元可以实现在一个或多个专用集成电路(ApplicationSpecific Integrated Circuits,ASIC)、数字信号处理器(Digital Signal Processing,DSP)、数字信号处理设备(DSP Device,DSPD)、可编程逻辑设备(Programmable LogicDevice,PLD)、现场可编程门阵列(Field-Programmable Gate Array,FPGA)、通用处理器、控制器、微控制器、微处理器、用于执行本申请所述功能的其它电子单元或其组合中。
对于软件实现,可通过执行本文所述功能的模块(例如过程、函数等)来实现本文所述的技术。软件代码可存储在存储器中并通过处理器执行。存储器可以在处理器中或在处理器外部实现。
具体来说,处理器803还配置为运行所述计算机程序时,执行前述技术方案中所述精准调整ADC相机的方法步骤,这里不再进行赘述。
需要说明的是:本发明实施例所记载的技术方案之间,在不冲突的情况下,可以任意组合。
以上所述,仅为本发明的具体实施方式,但本发明的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本发明揭露的技术范围内,可轻易想到变化或替换,都应涵盖在本发明的保护范围之内。因此,本发明的保护范围应以所述权利要求的保护范围为准。