智能机器人用的多自由度头颈部组件及调节方法
文献发布时间:2023-06-19 13:51:08
技术领域
本发明涉及玩具机器人配件技术领域,具体为智能机器人用的多自由度头颈部组件及调节方法。
背景技术
智能玩具机器人偶已经变得非常流行并且在玩具业中对于儿童和成人来说是众所周知的游戏选择,主要针对年轻男孩和收集者,这些玩具人偶通常复制男性导向的英雄和坏人等等,最常见的主题包括摔跤选手、军人、动画片角色、战士和超级英雄。此外,逼真元件的增加,包括细节的雕刻和服装,还进一步增强这些玩具动作人偶的可玩性和收集性,常见的智能玩具有机器人、智能车和及其动物等,由于机器人能够模仿人的肢体动作,广受孩童的喜爱。
例如专利号为CN202010384952.3的专利,公开了一种智能机器人的多自由度头颈部,包括整体安装架、左右摇摆架、俯仰转架、头部固定转架、弹簧、拉簧Ⅰ、拉簧Ⅱ、左右摇摆动力装置、俯仰动力装置和转动动力装置,通过左右摇摆动力装置,带动左右摇摆架转动,带动头部左右摆动,在装置断电时,由拉簧Ⅱ的拉力,将左右摇摆架拉动到自然状态;通过俯仰动力装置,带动俯仰转架在前后转动,带动头部俯仰摆动,在装置断电时,由拉簧Ⅰ的拉力,将俯仰转架拉动到自然状态;通过转动动力装置,使头部固定转架转动,带动头部左右转动,在装置断电时,由弹簧的弹力,将头部固定转架弹回自然状态,本发明可以在断电时退回原有齿轮位的移状态,使头部保持自然状态。
现有头颈部组件优化设计的不够合理,大都只能驱动机器人头部进行简单单一的转头动作,单一的转头动作并不能配合音乐进行动感起舞,造成机器人玩具对儿童的吸引力较差,可玩性欠佳,致使儿童对机器人玩具的兴趣较差,不利于市场销售。
发明内容
本发明的目的在于提供智能机器人用的多自由度头颈部组件及调节方法,以解决上述背景技术中提出单一的转头动作并不能配合音乐进行动感起舞,造成机器人玩具对儿童的吸引力较差的问题。
为实现上述目的,本发明提供如下技术方案:智能机器人用的多自由度头颈部组件及调节方法,包括底座;所述底座包括安装凸块,L状支撑杆和定位圈,所述底座整体呈矩形板状结构,其顶端中间处设置有一处矩形安装凸块,此安装凸块的中间处转动插装有一处被动转轴,且安装凸块的两端对称向上焊接有两处L状支撑杆,这两处L状支撑杆的顶端段之间转动安装有一处定位圈,定位圈的内部摆动支撑有一处柱状电机;电机;所述电机包括中心转轴,中心转轴转动穿设于电机的中心处并与转子轴接传动,且中心转轴的顶端段上滑动套装有一处安装盘;所述被动转轴包括套环,所述被动转轴的顶端焊接支撑有一处摆板,此摆板的首端倾斜焊接有一处套环;齿环,套环的顶端间隔支撑焊接有一处齿环;所述电机还包括定位轴,所述电机圆周外壁的中间位置对称支撑焊接有两处定位轴,此两处定位轴与定位圈转插配合;主动齿轮,所述中心转轴的上半段上套装有一处主动齿轮;所述电机还包括从动齿轮,所述电机上对称贯穿转动安装有两处从动转轴,此两处从动转轴的上下两端对称套装有两处从动齿轮;拨杆,位于顶端的两处从动齿轮上均向上支撑焊接有一处拨杆,此两处拨杆的顶端段上均转动安装有一处导轮,且顶端两处从动齿轮对应与主动齿轮啮合接触;所述安装盘包括滑环,所述安装盘整体呈圆形结构,其底部间隔吊撑有一处滑环,此滑环的内部贯穿开设有一处六角槽口;垂吊板,两处垂吊板对称焊接于安装盘的底部,且两处垂吊板位于滑环的左右两侧;所述安装盘还包括弧形弯曲板,两处所述垂吊板的底部对向焊接有两处弧形弯曲板;所述定位轴的下半段与套环和齿环套接配合,且齿环对应与底部的两处从动齿轮啮合接触;所述定位轴的上半段为六棱结构,且滑环通过弹簧顶推与定位轴的六棱杆段滑动配合;两处所述拨杆跟随顶端的两处从动齿轮转动对应与两处弧形弯曲板顶推接触。
优选的,其特征在于:包括以下步骤:
一、使用时将底座锁紧安装于机器人机身的顶端中间处,将安装盘的顶端锁紧连接机器人的头部;
二、将电机接电,电机驱动中心转轴、主动齿轮以及机器人的头部一起旋转;
三、主动齿轮啮合驱使上下四处从动齿轮旋转,其中上侧两处从动齿轮通过其上的两处拨杆顶推驱使两处弧形弯曲板以及安装盘和机器人的头部上下间歇滑动;
四、底部的两处从动齿轮啮合驱使齿环绕被动转轴进行偏心旋转,被动转轴偏心旋转带动电机进行全向摇摆转动。
与现有技术相比,本发明的有益效果是:
1、本发明通过合理巧妙的机械结构实现了机器人头部的丰富动作,即自身的旋转转头动作、绕圈摇头动作和上下探头动作,这三种动作配合同步进行能够体现出伴随音乐更加动感的起舞效果,可更好的调动儿童对玩具机器人的兴趣,使儿童接受喜爱机器人,有利于提升玩具机器人的销量;
2、本发明通过四处从动齿轮的动力传递,电机可旋转联动驱使齿环、被动转轴和两处弧形弯曲板、安装盘一起同步运动,使机器人头部的旋转转头动作、绕圈摇头动作和上下探头动作共用一处电机进行驱动,一举三得,省去为绕圈摇头动作和上下探头动额外配套驱动马达,有助于玩具机器人减重,并减低造价功耗,有利于市场竞争。
附图说明
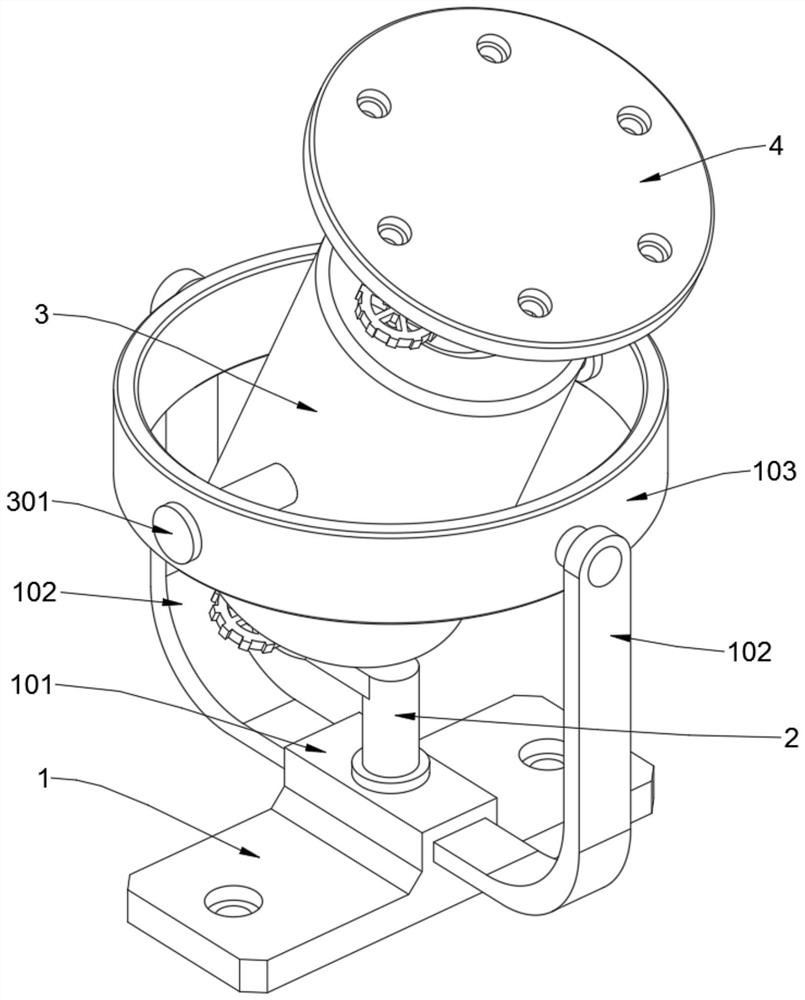
图1为本发明结构示意图;
图2为本发明L状支撑杆三维结构示意图;
图3为本发明定位圈三维结构示意图;
图4为本发明电机三维结构示意图;
图5为本发明电机底部三维结构示意图;
图6为本发明定位轴结构示意图;
图7为本发明从动齿轮结构示意图;
图8为本发明安装盘底部结构示意图;
图9为本发明图4中A部分放大结构示意图。
图中,部件名称与附图编号的对应关系为:
1、底座;101、安装凸块;102、L状支撑杆;103、定位圈;2、被动转轴;201、套环;202、齿环;3、电机;301、定位轴;302、中心转轴;303、主动齿轮;304、从动齿轮;305、拨杆;4、安装盘;401、滑环;402、垂吊板;403、弧形弯曲板。
具体实施方式
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。
请参阅图1至图9,本发明提供的一种实施例:智能机器人用的多自由度头颈部组件及调节方法,包括底座1;底座1包括安装凸块101,L状支撑杆102和定位圈103,底座1整体呈矩形板状结构,其顶端中间处设置有一处矩形安装凸块101,此安装凸块101的中间处转动插装有一处被动转轴2,且安装凸块101的两端对称向上焊接有两处L状支撑杆102,这两处L状支撑杆102的顶端段之间转动安装有一处定位圈103,定位圈103的内部摆动支撑有一处柱状电机3;
电机3;电机3包括中心转轴302,中心转轴302转动穿设于电机3的中心处并与转子轴接传动,且中心转轴302的顶端段上滑动套装有一处安装盘4;被动转轴2包括套环201,被动转轴2的顶端焊接支撑有一处摆板,此摆板的首端倾斜焊接有一处套环201;齿环202,套环201的顶端间隔支撑焊接有一处齿环202;电机3还包括定位轴301,电机3圆周外壁的中间位置对称支撑焊接有两处定位轴301,此两处定位轴301与定位圈103转插配合;主动齿轮303,中心转轴302的上半段上套装有一处主动齿轮303;电机3还包括从动齿轮304,电机3上对称贯穿转动安装有两处从动转轴,此两处从动转轴的上下两端对称套装有两处从动齿轮304;拨杆305,位于顶端的两处从动齿轮304上均向上支撑焊接有一处拨杆305,此两处拨杆305的顶端段上均转动安装有一处导轮,且顶端两处从动齿轮304对应与主动齿轮303啮合接触,通过主动齿轮303,电机3可旋转啮合驱使四处从动齿轮304同步一起转动;安装盘4包括滑环401,安装盘4整体呈圆形结构,其底部间隔吊撑有一处滑环401,此滑环401的内部贯穿开设有一处六角槽口,通过滑环401电机3以及中心转轴302可旋转驱使安装盘4以及其顶端的玩具机器人头部旋转,使机器人头部能够适用音乐并伴随音乐转头起舞;垂吊板402,两处垂吊板402对称焊接于安装盘4的底部,且两处垂吊板402位于滑环401的左右两侧;安装盘4还包括弧形弯曲板403,两处垂吊板402的底部对向焊接有两处弧形弯曲板403。
进一步,定位轴301的下半段与套环201和齿环202套接配合,且齿环202对应与底部的两处从动齿轮304啮合接触,通过底部的两处从动齿轮304,电机3可旋转啮合驱使齿环202绕被动转轴2做偏心转动,齿环202绕被动转轴2偏心转动时可带动驱使电机3以及安装盘4和其顶端的机器人头部进行360度全向摇摆转动,这实现了机器人头部的绕圈摇头动作;定位轴301的上半段为六棱结构,且滑环401通过弹簧顶推与定位轴301的六棱杆段滑动配合,定位轴301上半段上的弹簧可顶推驱使滑环401、安装盘4以及机器人的头部下滑复位;两处拨杆305跟随顶端的两处从动齿轮304转动对应与两处弧形弯曲板403顶推接触,通过两处拨杆305并配合定位轴301上半段上的弹簧一起使用,顶端的两处从动齿轮304可转动顶推驱使两处弧形弯曲板403以及安装盘4和其顶端的机器人头部进行上下间歇性滑动,这实现了机器人头部的上下探头动作,本发明通过合理巧妙的机械结构实现了机器人头部的丰富动作,即自身的旋转转头动作、绕圈摇头动作和上下探头动作,这三种动作配合同步进行能够体现出伴随音乐更加动感的起舞效果,可更好的调动儿童对玩具机器人的兴趣,使儿童接受喜爱机器人,有利于提升玩具机器人的销量。
进一步,包括以下步骤:
一、使用时将底座1锁紧安装于机器人机身的顶端中间处,将安装盘4的顶端锁紧连接机器人的头部;
二、将电机3接电,电机3驱动中心转轴302、主动齿轮303以及机器人的头部一起旋转;
三、主动齿轮303啮合驱使上下四处从动齿轮304旋转,其中上侧两处从动齿轮304通过其上的两处拨杆305顶推驱使两处弧形弯曲板403以及安装盘4和机器人的头部上下间歇滑动;
四、底部的两处从动齿轮304啮合驱使齿环202绕被动转轴2进行偏心旋转,被动转轴2偏心旋转带动电机3进行全向摇摆转动。
在另一实施例中可在齿环202以及套环201的圆周内壁上滚动镶嵌一圈滚珠,两圈滚珠可减小齿环202以及套环201与中心转轴302下半段的摩擦损耗,有助于延长齿环202以及套环201与中心转轴302的使用寿命。
工作原理:通过滑环401电机3以及中心转轴302可旋转驱使安装盘4以及其顶端的玩具机器人头部旋转,使机器人头部能够适用音乐并伴随音乐转头起舞,通过主动齿轮303,电机3可旋转啮合驱使四处从动齿轮304同步一起转动,通过底部的两处从动齿轮304,电机3可旋转啮合驱使齿环202绕被动转轴2做偏心转动,齿环202绕被动转轴2偏心转动时可带动驱使电机3以及安装盘4和其顶端的机器人头部进行360度全向摇摆转动,这实现了机器人头部的绕圈摇头动作,通过两处拨杆305并配合定位轴301上半段上的弹簧一起使用,顶端的两处从动齿轮304可转动顶推驱使两处弧形弯曲板403以及安装盘4和其顶端的机器人头部进行上下间歇性滑动,这实现了机器人头部的上下探头动作。
对于本领域技术人员而言,显然本发明不限于上述示范性实施例的细节,而且在不背离本发明的精神或基本特征的情况下,能够以其他的具体形式实现本发明。因此,无论从哪一点来看,均应将实施例看作是示范性的,而且是非限制性的,本发明的范围由所附权利要求而不是上述说明限定,因此旨在将落在权利要求的等同要件的含义和范围内的所有变化囊括在本发明内。不应将权利要求中的任何附图标记视为限制所涉及的权利要求。
- 智能机器人用的多自由度头颈部组件及调节方法
- 一种新型智能机器人的多自由度头颈部