一种可面向异形空间检修的水下作业机器人
文献发布时间:2023-06-19 13:27:45
技术领域
本发明属于水下大坝坝基引水隧洞、钻井平台水下管路等异形空间内部病险部位检测的技术领域,具体涉及的是一种可面向异形空间检修的水下作业机器人。
背景技术
目前针对海洋工程和水利工程中的水下结构检测及作业,主要依靠潜水员携带专业检测和作业设备完成,具有单次作业时间短、效率低、风险大等问题,而水下机器人能够克服以上条件限制,并具有经济、高效、安全的独特优势,可在水下进行长时间、大范围、高精度检测及作业,但是常规的水下作业机器人携带作业工具只能在水下病险结构外部进行非接触式检测,对于大坝坝基引水隧洞、钻井平台水下管路内部损伤部位无法进行深入检测,导致水下检测作业存在安全隐患。
发明内容
本发明要解决的技术问题是常规的水下作业机器人携带作业工具只能在水下病险结构外部进行非接触式检测,对于大坝坝基引水隧洞、钻井平台水下管路内部损伤部位无法进行深入检测,为解决上述问题,本发明提供一种可面向异形空间检修的水下作业机器人。
本发明的目的是以下述方式实现的:一种可面向异形空间检修的水下作业机器人,包括水下机器人主体,所述水下机器人主体端部设置微型机器人回收装置,微型机器人回收装置内部设置微型机器人,水下机器人主体端部位于微型机器人回收装置上方设置检测装置;
所述微型机器人回收装置包括卷盘、缆绳、回收舱体和电机,水下机器人主体端部连接回收舱体,回收舱体一端设置卷盘,卷盘一端连接电机输出端,卷盘上设置缆绳,缆绳的一端连接微型机器人,微型机器人端部设置微型检测装置。
所述微型机器人包括驱动轮、粗支撑连杆、细支撑连杆、套筒、拉伸弹簧、基座和驱动电机,缆绳的一端连接基座,基座周向铰接粗支撑连杆,粗支撑连杆远离基座一端通过销轴铰接细支撑连杆,细支撑连杆远离基座一端铰接套筒,套筒与基座间隙配合,套筒与基座内部设置拉伸弹簧,拉伸弹簧一端连接套筒,拉伸弹簧另一端连接基座,粗支撑连杆远离基座一端设置驱动轮,粗支撑连杆远离基座一端内部设置给驱动轮提供动力的驱动电机。
所述驱动电机输出端设置锥齿轮,驱动轮一侧设置锥齿轮,驱动电机输出端设置的锥齿轮与驱动轮一侧设置的锥齿轮齿轮啮合。
所述水下机器人主体设置辅助微型机器人回收到位的六自由度机械臂,水下机器人主体端部设置8个推进器。
相对于现有技术,本发明主要由水下机器人母体、微型机器人、微型机器人回收装置,六自由度机械臂等系统组成,机器人本体采用水平布置4个推进器进行进退、侧移运动,垂向布置4个推进器进行升沉、俯仰运动。微型机器人主要采用一种张紧轮位姿随动组合机构,通过将支撑连杆与拉伸弹簧刚柔耦合界定为轴向管径的位姿随动关系。微型机器人回收装置使用电机卷盘装置回收微型机器人。六自由度机械臂主要有七个电机驱动关节运动,该装置通过水下机器人与异形空间结构检测机器人组合,形成子母式水下结构检测机器人,弥补了常规水下检测方式漏检或检测不到等短板,在提高检测效率的同时,也能够实现对水下结构全方位检测。
附图说明
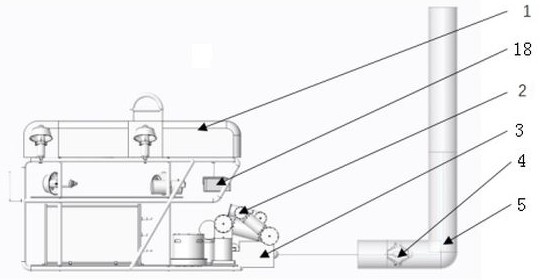
图1是一种可面向异形空间检修的水下作业机器人主视图。
图2是一种可面向异形空间检修的水下作业机器人俯视图。
图3是一种可面向异形空间检修的水下作业机器人的微型机器人剖视图。
图4是一种可面向异形空间检修的水下作业机器人微型机器人回收装置放大图。
图5是一种可面向异形空间检修的水下作业机器人微型机器人回收装置剖视图。
其中,1-水下机器人主体,2-机械臂,3-微型机器人回收装置,4-微型机器人,5-作业管道,6-推进器,7-驱动轮,8-粗支撑连杆,9-细支撑连杆,10-套筒,11-拉伸弹簧,12-基座,13-卷盘,14-缆绳,15-回收舱体,16-电机、17-驱动电机、18-检测装置、19-微型检测装置。
具体实施方式
下面结合附图和具体实施方式对本发明作进一步详细说明。
实施例1:
根据附图1到附图5所示的一种可面向异形空间检修的水下作业机器人,包括水下机器人主体1,所述水下机器人主体1端部设置微型机器人回收装置3,微型机器人回收装置3内部设置微型机器人4,水下机器人主体1端部位于微型机器人回收装置3上方设置检测装置18;
所述微型机器人回收装置3包括卷盘13、缆绳14、回收舱体15和电机16,水下机器人主体1端部连接回收舱体15,回收舱体12一端设置卷盘13,卷盘13一端连接电机16输出端,卷盘13上设置缆绳14,缆绳14的一端连接微型机器人4,微型机器人4端部设置微型检测装置19。
所述微型机器人4包括驱动轮7、粗支撑连杆8、细支撑连杆9、套筒10、拉伸弹簧11、基座12和驱动电机17,缆绳14的一端连接基座12,基座12周向铰接粗支撑连杆8,粗支撑连杆8远离基座12一端通过销轴铰接细支撑连杆9,细支撑连杆9远离基座12一端铰接套筒10,套筒10与基座12间隙配合,套筒10与基座12内部设置拉伸弹簧11,拉伸弹簧11一端连接套筒10,拉伸弹簧11另一端连接基座12,粗支撑连杆8远离基座12一端设置驱动轮7,粗支撑连杆8远离基座12一端内部设置给驱动轮7提供动力的驱动电机17。
所述驱动电机17输出端设置锥齿轮,驱动轮7一侧设置锥齿轮,驱动电机17输出端设置的锥齿轮与驱动轮7一侧设置的锥齿轮齿轮啮合。
所述水下机器人主体1设置辅助微型机器人4回收到位的六自由度机械臂2,六自由度机械臂2主要有七个电机驱动关节运动,当检测过程遇到水下破损管道检测工况,水下机器人主体1通过自身搭载的机械臂2,释放前端异形空间检测微型机器人4,在微型机器人4回收过程中,如果遇到异物羁绊,或缆绳14断裂等恶劣工况,导致微型机器人4回收不到位,水下机器人主体1同样采用机械臂2辅助的方式,将微型机器人4抓取回收至水下机器人主体1,避免狭小空间复杂作业过程,微型机器人4丢失导致检测任务失败的现象,水下机器人主体1端部设置8个推进器6,使得水下机器人主体1先对钻井平台水下结构周围进行大范围检测。
本发明的工作过程如下:该一种可面向异形空间检修的水下作业机器人在进行大坝和钻井平台水下结构检测作业过程中,通过岸上辅助船将该装置释放至作业水域,水下机器人主体1通过搭载的水平和垂直各4各推进器6,实现水下六自由度运动,按照任务设定的规划路线,航行至检测对象附近,通过搭载机械臂2和水下机器人主体1上的检测装置18进行大坝或钻井平台表面结构物检测维修,遇到大坝引水隧洞或钻井平台水下破损管路等异形空间结构检测时,水下机器人主体1释放两个微型机器人4,微型机器人4与水下机器人主体1通过符合缆绳14连接,操控人员可实时操控微型机器人4进入异形空间内部,微型机器人4上的微型检测装置19进行检测作业,当检测任务完成时,电机16带动卷盘13将缆绳14缠绕在卷盘13上收回,带动微型机器人4缩回回收舱体15,从而实现对水下结构物的全面检测。
以上所述的仅是本发明的优选实施方式,应当指出,对于本领域的技术人员来说,在不脱离本发明整体构思前提下,还可以作出若干改变和改进,这些也应该视为本发明的保护范围。
- 一种可面向异形空间检修的水下作业机器人
- 一种面向水下机器人智能作业的鱼群目标识别方法