用于门驱动装置或者窗驱动装置的控制装置
文献发布时间:2023-06-19 13:46:35
相关申请的交叉引用
本申请要求于2019年5月15日提交的瑞士专利申请0635/19的优先权,其全部内容通过引用结合在本申请中。
技术领域
本发明涉及一种用于控制适用于扇叶的,特别地适用于门扇或者窗扉的驱动装置的方法。
背景技术
用驱动装置(例如用电动机)自动开动门或窗是已知的。由此,用户不必亲自施力来开启或者关闭门或者说窗。对应的自动驱动装置包括用于驱动装置的控制装置,该控制装置由用户例如通过按压门把手或者说窗柄,或者甚至通过靠近接近传感器而被触发。控制装置随即促成门或者说窗的预先给定的运动。在门或者说窗的开启或者关闭位置上,驱动装置一般不引起向着门或者说窗的力。
传统驱动装置有各种缺点。如果用户在通过驱动装置进行控制的过程中对门或者说窗施加外力,则驱动装置顶着外力工作。一方面,这对于用户而言是不方便的并且是不期望的,因为用户可能会希望对着驱动装置,快速地再次开启或者关闭门或者说窗或者将其保持在中间位置上。另一方面,驱动装置的这种特性会导致驱动机构受损。
发明内容
本发明的目的在于,消除传统的用于门或者说窗的驱动装置的缺点。该目的通过一种根据权利要求1所述的用于控制驱动装置的方法以及一种根据权利要求13所述的自动驱动装置得以实现。
为了更好的可理解性,应该在一开始定义一些术语,这些术语在本申请中具有其正常意义之外的特定意义:
扇叶(Blatt):在下文中,扇叶指的是门、窗或类似设备的可移动部分,也被称为门翼或者说窗翼。因此,除了门扇外,例如门边框(也被称为门框)也属于门的一部分。在这种情况下,在本发明的意义上,术语“扇叶”并不局限于可转动地支承的扇叶,而是还包括为了打开或关闭而被推动的扇叶和其它可考虑的实施方案。
动量:在下文中,动量指的是一种可以描述扇叶运动的物理量,在这种情况下,动量可以特别地是位置或速度,其中后者表示位置关于时间的第一导数。位置的其它时间导数作为动量也是可设想的。在可转动地支承的扇叶的特殊情况下,例如对于常见的平开门,动量可以对应地是角位置或者角速度。
额定行程曲线:在下文中,额定行程曲线理解为第一动量与第二动量之间(例如速度与位置之间)或者动量与时间之间(例如位置与时间之间)的关系。额定行程曲线的走向或者至少特定的用于额定行程曲线的参数或者准则是预先给定的。额定行程曲线可以例如保存为曲线、函数或者查找表。一般情况下,驱动装置驱动扇叶,其中按照根据额定行程曲线的额定值控制动量,例如取决于扇叶位置的速度调节。
公差范围:在下文中,公差范围指的是高于和/或低于根据额定行程曲线的额定值的动量数值范围。公差范围特别地由下限公差值和上限公差值界定。在这种情况下,下限公差值小于额定值,而上限公差值大于额定值。下限公差值和/或上限公差值可以是可变的,即例如取决于扇叶的位置。超出公差范围意味着动量的测量值向下低于下限公差值或者向上高于上限公差值。特别地,扇叶的驱动装置的尺寸大小为使得其可以调节扇叶的动量,而不会在仅有诸如重力和摩擦力等普遍存在的力作用在扇叶上时超出公差范围。
测量:在下文中,除了物理量的直接测量外,量值的测量还指的是根据直接测得的量值推导其它量值。因此,可以通过编码器或者旋转测量传感器,例如经由电压或者电压脉冲的数量,确定扇叶的角位置。但是,在这种情况下,特别地通过关于时间的导数,根据角位置确定角速度也属于测量。
空转状态:通常由控制单元控制驱动装置,其中在驱动装置上施用电压,其数值由控制单元确定。相反,驱动装置在空转状态下停机。有利地,在空转状态下,在驱动装置上没有任何电压。因此,在空转状态下,优选地只有小于最小力的力作用在扇叶上。该力可以例如由(例如门轴承或者驱动装置中的)摩擦引起,或者由例如当驱动装置短路时出现的发电机效应或者由驱动装置中可能存在的弹簧引起。最小力特别地为67N。该数值得自适用于自动门的标准EN 16005,并且给出用户在驱动装置停机时必须以多大的力度按压扇叶的最大数值。如此定义的空转状态由此不同于扇叶的驱动状态。特别地,扇叶在空转状态下会如用户正常情况下所预期地移动,因为仅有诸如重力和摩擦力等普遍存在的力作用在扇叶上。
本发明的一个方面是一种用于控制适用于扇叶的,特别地适用于门扇或者窗扉的驱动装置的方法,该方法包括以下步骤:测量扇叶的动量的测量值,将测量值与额定行程曲线的公差范围相比较,并且根据额定行程曲线,通过驱动装置驱动扇叶。在超出公差范围时,扇叶被置于驱动装置停机的空转状态。相反,在测量值处于公差范围内时,优选地由驱动装置驱动扇叶。除此之外,测量值优选地也与根据额定行程曲线的额定值相比较。当测量值处于公差范围内时,控制装置优选地调节驱动装置,使得动量接近额定值。
该方法由此基于测量值和预先给定的额定行程曲线,通过驱动装置,特别地调节扇叶的动量,即例如位置和/或速度。该方法的优点在于在定义的准则下开始的空转状态。因此,可能会由于想尽可能快速开启或者关闭扇叶或者将其保持在中间位置的用户或者物体造成超出公差范围,其中,中间位置既不对应于关闭位置,也不对应于完全打开的位置。在空转状态下,所描述的控制装置使得用户可以在不让驱动装置顶着自己工作的情况下做到这一点。一方面,这引起扇叶的舒服的、用户觉得自然并且期待的特性。这样可以预防由于扇叶(例如重型门)的意外特性而造成的受伤。另一方面,该特性保护了驱动装置的机构以及可能的传动部分和连杆部分。
在下文中描述了其它优选的准则和参数,这些准则和参数可以为扇叶的控制装置而制定并且进一步提高包括该控制装置的自动驱动装置的用户友好性。因此,在为空转状态定义的持续时间结束后,优选地,再次开始根据额定行程曲线驱动扇叶。定义的持续时间可以例如为1s到60s,并且特别地为2s到10s。由此,在为空转状态定义的持续时间结束后,扇叶被驱动装置优选地带入定义的位置上,特别地,该位置可以是扇叶的关闭位置或者开启位置。针对于控制装置的所述预定规定具有以下优点,即扇叶不会持续地停留在代表了不受调节状态的空转状态中。用户在定义的持续时间和随后的开启或者关闭过程结束之后走近扇叶,发现其处于预期的状态中,即关闭或者开启。因此,用户无需操心扇叶的完全开启或者说关闭,而是可以节省时间并且任由扇叶留在任意位置上,而扇叶在这种情况下特别地不会停留在不确定的位置上并且例如不会不受控地猛地关上。
优选地,额定行程曲线包括以下部段:扇叶从零位中的特别地为零的静止速度加速到第一位置上的第一速度;扇叶以第一速度移动至第二位置;扇叶从第一速度制动至静止速度,使得其在到达第三位置时具有静止速度。额定行程曲线可以描述任一项以下过程:扇叶的开启过程,其中零位是扇叶的关闭位置,并且第三位置是扇叶的(特别是处于止挡状态的)开启位置;或者扇叶的关闭过程,其中零位是扇叶的开启位置,并且第三位置是扇叶的关闭位置。零位和第三位置上的静止速度优选地应为零。由此,实现扇叶的驱动装置不会使劲关上,这可能会造成扇叶、边框或者驱动装置的损伤。除此之外,由此可以防止噪声产生和用户受伤。
然而,现在会出现这种情况,即用户或物体(例如病床)或者其它外力(例如气流)会在一定程度上加速扇叶,使之不再有可能在到达第三位置前制动至静止速度。为了避免这种情况,可以创立另一用于控制装置的准则:优选地,当动量的测量值高于最大值时,结束扇叶的空转状态并由驱动装置驱动扇叶。特别地,最大值取决于驱动装置的最大制动力和扇叶的位置。可以事先确定驱动装置的最大制动力,并且将其保存为用于控制装置的参数。扇叶越靠近第三位置,刚好还可以通过驱动装置制动的最大值(例如最大可制动的速度)就越低。因此,特别地预设了,在空转状态结束后,驱动装置以最大制动力对扇叶进行制动,使得其在到达第三位置时具有静止速度。
在该方法的另一优选实施方案中,在扇叶进入空转状态之前,在超出公差范围时,即特别地当其即将进入空转状态时,作为选项,首先以定义的加速度值,朝额定值的方向对其进行制动或者加速。特别地,在超过定义的持续时间内(例如在1s内)对扇叶施加定义的力适合于作为定义的加速度值。当动量对应于定义的加速度值变化时,优选地再次开始根据额定行程曲线进行驱动,而扇叶不进入空转状态。否则,扇叶实际上被置于空转状态。通过记录动量测量值的时间序列并且将其与基于运动方程预期的时间序列相比较,可以确定动量是否对应于定义的加速度值变化。当扇叶进入空转状态时“急刹”或者“短暂加速”的额外益处在于:这样可以区分扇叶上由用户有意施加的力与其它的力(例如暂时的气流)。只有当例如由用户或者物体引起的外力持续作用时,扇叶才会优选地进入空转状态。
除此之外,可以定义可以如何激活,特别是由用户激活扇叶的驱动装置:优选地,通过开启或者关闭指令,触发由驱动装置根据额定行程曲线进行的扇叶的驱动。其可以包括以下事件中的任一种:操作开关或者按键,特别地按压门把手或者窗柄;或者来自与驱动装置通信的设备的信号,例如来自与驱动装置无线地或者经由线缆相连的外部系统或者移动设备的信号;或者来自与驱动装置通信的传感器的信号;或者特别地由人或者由物体(例如病床)施加的、从外部到扇叶上的力的作用。在外力作用后采取的控制也被称为“一推就动(Push&Go)”。用户只需短暂地推动扇叶以使驱动装置启动;随后用户便可以由于所描述的控制装置而继续前进,而不用考虑扇叶停留的位置。在一种优选实施方案中,开启或者关闭指令也结束扇叶的空转状态。这一点由此呈现了另一准则,即除了可能的关于所定义的持续时间和最大制动力的准则外,扇叶还能如何从空转状态进入驱动状态。
本发明的另一方面涉及一种用于扇叶的,特别地用于门扇或者窗扉的自动驱动装置。该自动驱动装置包括:用于测量扇叶的动量的传感器、驱动装置和用于实施上文中描述的方法的控制单元。为了测量动量,可以特别地使用编码器(也称为旋转角度传感器),或者使用可通过扇叶位置改变的电阻。然而,也可以考虑其它测量原理和传感器,例如电容式。驱动装置可以特别地被设计为电动机或者致动器。在一种优选实施方案中,自动驱动装置还包括用于测量驱动电压的传感器。可以根据驱动电压推导出其它可用于控制装置的参数,例如特别是当有外力顶着驱动装置起作用时,驱动装置为了达到特定的动量值而采取的或者说必须施加的功率或者力。在另一优选实施方案中,驱动装置包括用于制动扇叶的制动装置。制动装置可以引起除了由电动机或者致动器施加的制动力外的扇叶制动。制动装置的一种实施方案是驱动装置的传动器或者连杆中的阻断器。
本发明的另一方面涉及一种计算机程序,当在处理器上实施时,该计算机程序使所描述的方法被执行。为了使其实现,该计算机程序可以被保存在计算机可读的数据载体上。
对于本领域技术人员而言,明显可以由组合不同实施方案的特征和方面获得协同效应。即便没有详细描述,其也明确地涵盖在本文的公开内容中。
附图说明
根据下文中基于附图显示的实施方案,得出本发明的其它有利设计方案。在附图中:
图1示出了根据一种实施方案的一种门的立体视图,其中包括驱动装置、控制装置、各种传感器以及开关;
图2示出了根据一种实施方案的一种额定行程曲线的图表,其中包括动量的额定值和公差范围;
图3示出了根据一种实施方案的一种用于控制适用于扇叶的,特别地适用于门扇或者窗扉的驱动装置的方法的流程图;
图4示出了根据一种实施方案的一种替代的用于控制适用于扇叶的,特别地适用于门扇或者窗扉的驱动装置的方法的流程图。
具体实施方式
图1示出了根据一种实施方案的一种门在房间内的立体视图。门包括门扇1、门框2和用于手动开启和关闭门的门把手3。图1的实施方案示出了一种平开门,其中门扇1在其左侧上,通过门铰链4可转动地支承在门框2上。但是,在下文中描述的设备和方法并不局限于平开门,而是也可以应用至例如窗扉等其它扇叶和例如滑动门或者滑动窗等其它支承类型。
根据本发明,门扇1可以由驱动装置5驱动。驱动装置5通常是电动机或者致动器,其被安置在门框2上方的门楣上并且通过连杆与门扇1相连。但是,驱动装置5也可以替代地固定在门扇1上。驱动装置5受控制装置控制,该控制装置可以被集成到驱动装置5的壳体内或者布置在外部。用于驱动装置5和控制装置的必要电流由供电装置6提供。
可以通过各种途径触发或者接通驱动装置5的控制装置,其中在图1中示出了若干途径。通过其中任一途径的信号就足以触发或者接通控制装置。一方面,门把手3可以例如通过电连接或者通过无线电与控制装置相连,使得手动开启或者关闭指令通过操作门把手3而传递至控制装置。然而,各种其它类型的脉冲传感器也是可能的,诸如开关7或者按键8,特别是要用钥匙或者指纹操作的开关。此外,当用户靠近门时,还可以由接近传感器9触发关闭或者开启指令。
无线电开关10也是有利的,其例如通过用户随身携带的令牌或者移动电话11在靠近时触发。由此,用户可以轻而易举地开启并且通过门,而不必腾出手来。通过移动电话11实现的控制装置的触发恰恰是有利的,因为通过无线电连接,例如经由蓝牙,不仅可以将开启或者关闭指令从移动电话11发送至无线电开关10或者直接发送至控制装置,还可以实现其它功能性。举例而言,可以通过App设定控制装置的各种参数,例如最大开启角度、开启或者关闭速度或者预定义的空转状态持续时间。也可以通过该途径进行驱动装置5的校准。
此外,关闭或者开启指令还可以来自连接至驱动装置5或者说其控制装置的外部系统12。这种外部系统12的示例是火灾报警设备,其触发所有门的关闭以防火灾蔓延。在另一实施方案中,可以由与驱动装置5或者说其控制装置通信的传感器的信号触发关闭或者开启指令。
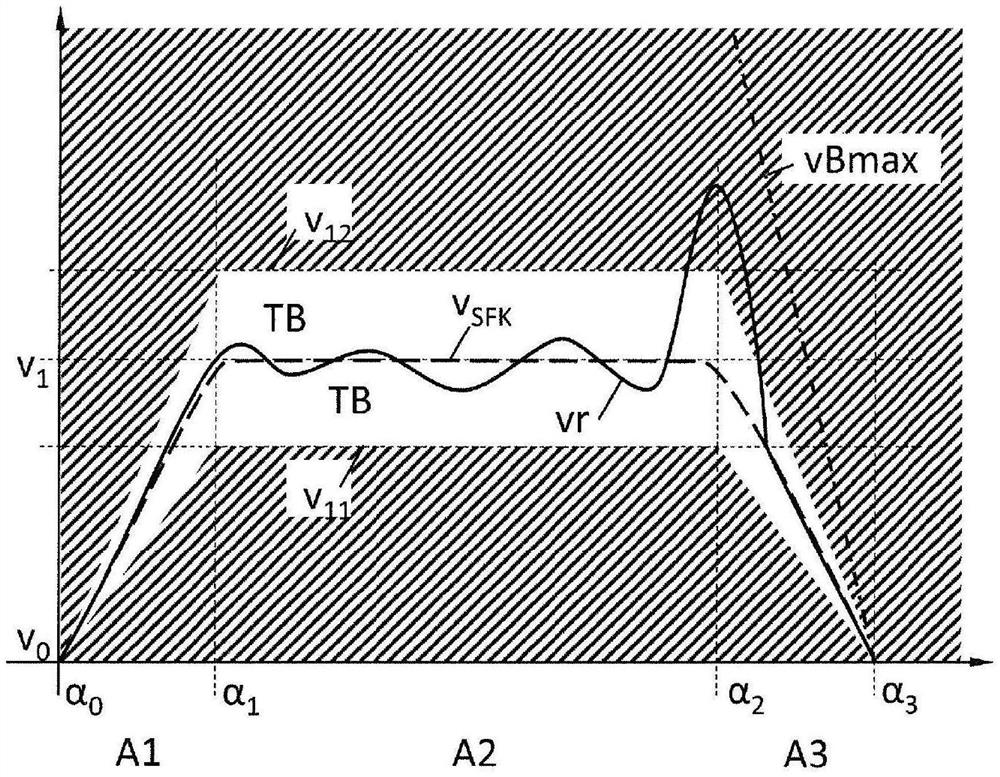
图2示出了额定行程曲线SFK的图表,其给出动量的额定值,控制装置将扇叶1调节到该额定值。在所示的情况下,受控的动量是取决于角位置α的速度v。这种控制装置可以例如被用于根据图1的平开门。在角位置α0(也被称为零位)中,门扇1处于关闭位置,α3标记第三角位置,有意义地将第三角位置预设为门扇1止挡时的角位置或者关闭位置与止挡部之间的其它数值。
在图2中所示的额定行程曲线SFK中,取决于根据测量(例如通过编码器)已知的角位置α,通过控制装置调节驱动装置。典型的门扇开启过程可以因此划分为以下部段,其类似地也可应用于关闭过程:
当控制装置收到开启指令时,在零位α0与第一角位置α1之间的第一角度范围A1内,驱动装置5将门扇1从为零的静止速度v0加速至第一速度v1。在α1到第二角位置α2之间的第二角度范围A2内,以第一速度v1移动门扇1。在α2到α3之间的第三角度范围A3内,门扇1被驱动装置5制动,使得其在第三角位置α3中再次达到静止速度v0。与此对应地,门被平缓地开启,其中除了开启指令外,不需要任何其它外部作用。
在额定行程曲线SFK周围还有公差范围TB。在正常情形下,特别地在没有外部作用的情况下,驱动装置5能够在公差范围TB内控制门扇1的速度v。与此同时,只要测得的速度值vr处于公差范围TB内,就认为是由驱动装置5驱动门扇1。在图2的示例中,在第二角度范围A2中,公差范围TB向下由下限公差值v11并且向上由上限公差值v12界定,其中0
如果此时从外部有(例如由用户或者气流引起的)力作用在门扇1上,则门扇1可能会被猛烈地制动或者加速,导致其超出公差范围TB,使得vr
为了从空转状态FL再次进入门扇1的根据额定行程曲线SFK的驱动状态,可以考虑各种准则。这些准则可以单独地或者共同地实现。然而,优选地,满足其中任一准则即已足以再次进入驱动状态:一旦测得的速度值vr再次处于公差范围TB内,驱动装置5就可以再次根据额定行程曲线SFK调节门扇的速度v。两个另外的准则也是有利的:一方面,为空转状态FL预先给定定义的持续时间TFL,在该持续时间之后,自动地再次开始根据额定行程曲线SFK,通过驱动装置5进行调节。另一方面,用户可以通过再一次的开启或者关闭指令,触发回到驱动状态。为了这一目的,当从外部作用在门扇1上的力冲量引起门扇1从静止速度v0开始的特定加速时,其也被解读为开启或者关闭指令。这种功能性被称为“一推就动(Push&Go)”。用于控制驱动装置5的方法以及各种准则的相互作用在图3中变得清晰明了。
图3示出了根据一种实施方案的一种用于控制适用于扇叶的,特别地适用于例如根据图1的门扇的或者窗扉的驱动装置的方法的流程图。所示的方法包含步骤S1至S9。通过步骤S1中的开启或者关闭指令触发控制过程。在步骤S2中,通过传感器,例如通过编码器,测量瞬时角位置αr和瞬时速度vr。步骤S3呈现了一种安全准则:驱动装置5可以最高以最大制动力FBmax对门扇1进行制动,其中可以为驱动装置5确定最大制动力并且将其视为门扇1的固定参数。如果此时根据测量,门扇1已经非常靠近第三角位置α3,即例如靠近止挡部,但是仍继续以等于或大于最大可制动速度vBmax(即vr≥vBmax)的速度vr移动,则在步骤S4中,驱动装置5立即以最大制动力FBmax对门扇1进行制动,以尽可能达到α3处的静止速度v0并且避免门扇1不受控地关上。除了取决于参数FBmax外,最大可制动的速度vBmax还取决于角位置αr或者说相对于最大角位置的角距离,即|α3-αr|。除此之外,步骤S3可以包括其它安全准则,例如来自安全传感器或者诸如火灾警报系统等外部安全系统的指令。
如果未超出最大可制动的速度vBmax,则在步骤S5中进行测得的速度vr与根据公差范围TB的速度的比较。如果vr处于公差范围TB内,则在步骤S6中,通过驱动装置5,根据额定行程曲线SFK对门扇1进行驱动。该进程通过在步骤S2中再一次测量αr和vr得以继续。
但是,如果vr处于公差范围TB外,则门扇1在步骤S7中进入驱动装置5停机的空转状态FL。联系图2,已经简要地提及再次离开空转状态FL的准则:在步骤S8中检验自进入空转状态FL起已经过去的时间是否超出预定义的持续时间TFL。如果是,则切换至根据步骤S6的驱动状态。如果否,即如果预定义的例如6s的持续时间TFL尚未结束,则空转状态FL继续。
此外,当控制装置收到再一次的开启或者关闭指令时,也可以根据步骤S9结束空转状态FL。在这种情况下,以步骤S6中的根据额定行程曲线SFK的门扇1的驱动继续。如果没有出现再一次的开启或者关闭指令,则以步骤S2中的αr和vr的测量继续进程。
图4示出了根据一种实施方案的一种替代的用于控制适用于扇叶的,特别地适用于例如根据图1的门扇的或者窗扉的驱动装置的方法的流程图。该方法一如图3包括步骤S1至S9。然而这些步骤的顺序在一个重要的节点上有所改变。因此,S3中的准则(即在超过最大可制动的速度vBmax时,根据S4,立即以最大制动力FBmax对门扇1进行制动)被挪到流程图结束处。因此在S2中测量动量αr和vr后,直接以S5继续,即判断测得的速度vr是否位于公差范围TB内。
只有当在步骤S9中没有探测到另外的开启或者关闭指令时,根据S3的最大力准则和可能的其它安全准则才在图4中起作用。如果在S3中测得的速度vr没有超过最大可制动的速度,则再一次进行自S2中的动量αr和vr的测量起的方法步骤。因此,不同于图3,在图4中,只有当门扇1处于空转状态FL时,才检验最大力准则。
因此,图3和图4示出了用于控制适用于门扇或者窗扉的驱动装置的方法的多个实施方案。在这种情况下,也可以考虑步骤的其它顺序。因此,也能够以相反的顺序进行例如呈现了用于离开空转状态FL的准则的步骤S8和S9。
优选地,例如在包括对应的存储器的微处理器上,用计算机实现所描述的用于控制适用于门扇或者窗扉的驱动装置的方法,其中微处理器完成驱动装置5的控制。