用于在开启位置和关闭位置之间的摆动路径上移动摆动门扇的摆动门操作器、摆动门及具有摆动门的房间
文献发布时间:2023-06-19 13:46:35
技术领域
本发明涉及一种用于在开启位置和关闭位置之间的摆动路径上移动摆动门扇的摆动门操作器、摆动门及具有摆动门的房间。更具体地,本公开涉及如权利要求1、权利要求14和权利要求15中限定的用于在开启位置和关闭位置之间的摆动路径上移动摆动门扇的摆动门操作器、摆动门及具有摆动门的房间。
背景技术
自动开启的门在现代社会中广泛使用,尤其是在公共建筑和办公室中。当自动门用于狭窄隔间时(例如公共厕所),自动门通常配备传感器,以用于在人站在门扇路径时防止门关闭,这样就能防止人被门扇击中。然而,这样的解决方案可能会导致传感器会检测到狭窄隔间内的人,而门不会关闭,这是因为目前的传感器通常与门的角度无关地维持其传感检测区域。这意味着,当门几乎关闭时,从门到狭窄隔间至少有200mm的安全区域。这个问题已经通过忽略门在关闭周期的最后部分时来自传感器的信号来解决,这增加了狭窄隔间内人员受伤的风险。
因此,当涉及到自动门关闭周期中的安全问题时,行业中存在着问题。此外,当用户在房间内但离门足够近以触发检测器时,自动门重新打开或延迟关闭,这会影响用户体验。
发明内容
本发明的目的是单独或以任何方式组合减轻、缓解或消除上述技术中缺陷中的一个或多个和不利因素,并且至少解决上述问题。根据第一方面,提供了一种摆动门操作器,用于在开启位置和关闭位置之间的摆动路径上移动摆动门扇。摆动门操作器包括至少一个驱动单元,其布置成在开启位置和关闭位置之间移动摆动门扇。摆动门操作器还包括控制单元,其可操作地连接至驱动单元和第一传感器,其中第一传感器构造成识别在摆动门扇的第一侧前方的对象,控制单元构造成在第一传感器识别到在摆动门扇的第一侧前方的安全区域中的对象时,做出反应。控制单元构造成基于摆动门扇的摆动路径和摆动门扇的位置调整安全区域的尺寸/面积。
因此,安全区域可限制在门扇的第一侧的区域内,在门扇的关闭操作期间,门将会在其开启位置和关闭位置之间的路径上在该安全区域中行进。安全区域因此例如形成为由门扇和关闭位置或门口/门框限定的圆扇形区域。这导致以下优点,在门的整个关闭过程中,安全区域是有效的,同时仍然允许在狭窄隔间(如厕所)内的人使用隔间内的全部空间而不会被第一传感器检测到。此外,不存在自动门由于完全在隔间内但靠近门口的用于而重新开启或延迟关闭的可能性。
根据一些实施例,摆动门包括门位置传感器,以随时跟踪门的位置。门位置传感器可以是角度传感器或陀螺仪或用于直接或间接测量门扇的角度位置的任何其他合适的传感器。门扇的角度位置用于控制单元限制安全区域的面积。
根据一些实施例,控制单元构造成减少初始安全区域的尺寸/面积,减小的面积为在摆动门扇的当前摆动路径位置上、不在摆动门扇的第一侧前方的安全区域的面积。
根据一些实施例,控制单元构造成若摆动门扇的第一侧前方的安全区域中由第一传感器识别出对象,停止摆动门扇的移动。当在安全区域中检测到对象时停止摆动门扇的移动,是一种避免摆动门扇与被检测到的对象之间发生撞击的安全方式。
根据一些实施例,第一传感器适于测量与被检测到的对象的距离,而在检测到安全区域中的对象时,控制单元的反应取决于与对象的检测距离。操作器可利用这点,在与安全区域中被检测到的对象的距离高于预设阈值时,减速摆动门扇的移动,并在与安全区域中被检测到的对象的距离低于预设阈值时,停止摆动门扇的移动。摆动门扇的移动速度可例如根据检测距离来调整,使得门在与被检测到的对象撞击之前将平稳地减速和停止。若在摆动门扇开始减速后,被检测到的对象从安全区域移出,那么可能会再次加速关闭移动。这节省了用于运行摆动门操作器的能量,因为被检测到的对象只是暂时在安全区域内,并且与门在只是暂时减速门扇移动的距离处。
根据一些实施例,摆动门操作器包括第二传感器,其构造成识别在摆动门扇的第二侧前方的对象,其中控制单元构造成在第二传感器识别到在摆动门扇的第二侧前方的第二安全区域中的对象时,做出反应;控制单元构造成基于摆动门扇的摆动路径和摆动门扇的位置调整第二安全区域的尺寸/面积。因此,当将门从关闭位置打开至开启位置时,也可以在摆动门扇的摆动路径中检测对象。
根据一些实施例,摆动门操作器包括存储器和通信器件,其中控制单元构造成基于存储器中存储的限制信息设置安全区域和/或第二安全区域的最大尺寸,其中限制信息可经营与通信器件的外部连接更改。
在此情况下,可以针对不同的情况向摆动门操作器的控制单元发出不同的指令。例如,若火警响起,第二安全区可以被省略,以确保门会打开。若临时障碍物(例如花瓶)被放置在正常的第二安全区,则可以改变摆动门扇的开放端位置。
根据一些实施例,当摆动门操作器已停止摆动门扇的移动时,摆动门扇也可以被手动开启,以确保摆动门操作器不会将人困在房间里。
根据一些实施例,摆动门扇是用于小房间或狭窄隔间(如公共厕所)的门。
根据一些实施例,第一传感器、第二传感器和/或位置传感器是马达的至少一个内置传感器。
根据一些实施例,控制单元构造成与传感器配合,启动/激活并执行门操作器的自主操作。当开启的门例如经由第一传感器检测到有人穿过该门时,摆动门扇的关闭可以自动启动。
根据一些实施例,马达是电动马达,由于电动马达体型小、动力强大且可靠,因而方便使用。
根据第二方面,提供了一种摆动门,包括根据第一方面的摆动门操作器。
根据第三方面,提供了一个具有根据第二方面的摆动门的房间,其中摆动门布置成沿向外方向开启。
第二方面和第三方面的效果和特征在很大程度上类似于上述与第一方面有关的描述。第一方面提到的实施例在很大程度上适用于第二方面和第三方面。
本发明的进一步适用范围将在下面的详细描述中显而易见。然而,应该理解的是,详细描述和具体示例虽然阐明了本发明的优选实施例,但只是以说明的方式给出。对于本领域的技术人员来说,本发明范围内的各种变化和修改在详细描述中变得显而易见。
因此,应当理解的是,由于设备和方法可能有所不同,本文中公开的发明并不局限于所述设备的特定组成部分或所述方法的步骤。还应理解的是,本文中使用的术语仅用于描述特定的实施例,而不是为了限制。应该注意的是,在说明书和所附权利要求书中使用的词“一”、“一种”、“该”和“所述是指存在一个或多个要素,除非上下文明确规定了其他内容。因此,例如,提到“一单元”或“该单元”可以包括若干设备,等等。此外,用词“包括”、“囊括”、“包含”和类似的措辞并不排除其他元素或步骤。
附图说明
在结合附图的情况下,参照以下对本发明的示例性实施例的说明性和非限制性的详细描述,可更充分地理解本发明的上述目的以及其他目的、特征和优点。
图1a示出根据现有技术的具有具备安全区域的摆动门的公共厕所的俯视图。
图1b示出根据现有技术的具有具备安全区域的摆动门的公共厕所的俯视图,其中门有关闭问题。
图2a示出根据本公开一实施例的具有具备安全区域的摆动门的公共厕所的俯视图。
图2b示出图2a的公共厕所的俯视图,其中门几乎关闭,其中已与摆动门扇的角度位置成比例地减少安全区域。
图3为根据本发明一个实施例的摆动门操作器的详细示意图。
图4为根据本发明一个实施例的具有摆动门操作器的摆动门的侧视图。
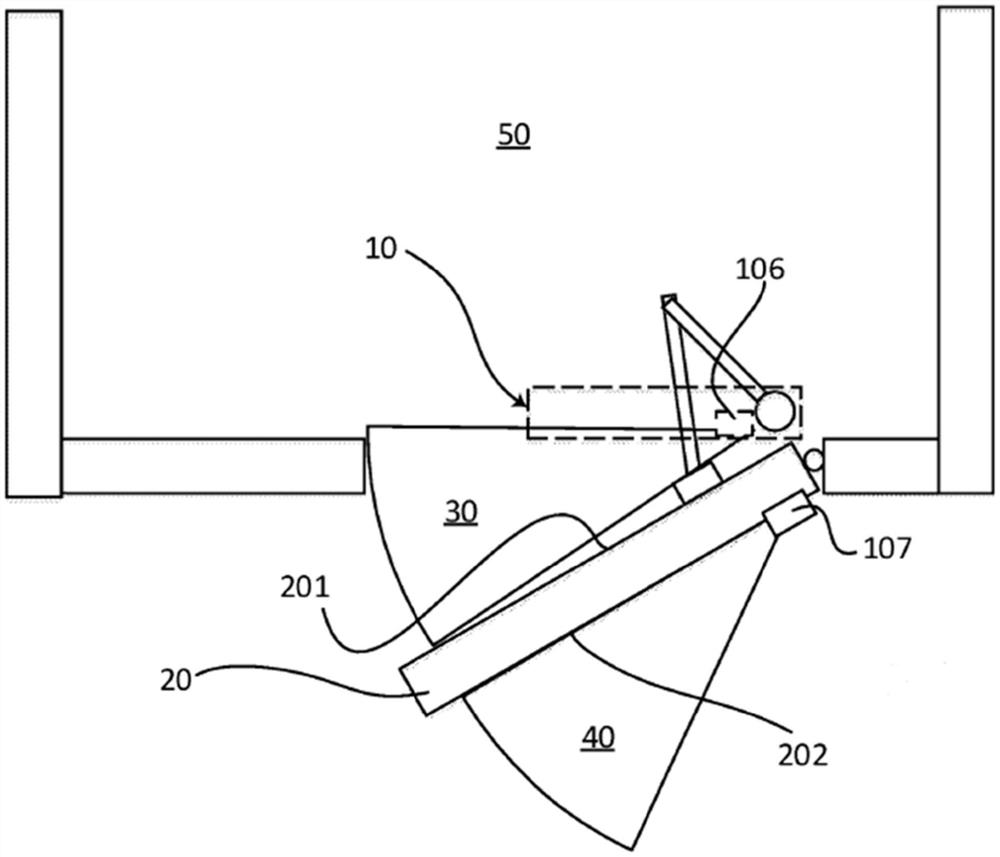
图5为根据本发明一个实施例的具有摆动门操作器的摆动门的详细俯视图。
图6为根据图5的具有摆动门操作器的摆动门的详细俯视图,其中摆动门扇部分关闭,安全区域已根据摆动门扇的角度位置被减少。
具体实施方式
现在将参照附图来描述本发明,附图中显示了本发明目前优选的示例性实施例。然而,本发明可以以许多不同的形式体现出来,不应理解为仅限于本文中所公开的实施例。提供所公开的实施例是为了向技术人员充分表达本发明的保护范围。
图1a示出根据现有技术的具有具备安全区域3的摆动门2的公共厕所的俯视图。公共厕所包括马桶52,水槽53和站在房间里的人。在图1b中,图1a的门由于静态的安全区域3而出现了关闭问题,安全区域3随着门的移动而移动,使得在门扇2关闭时,安全区域3逐渐覆盖厕所内越来越大的空间。在图1b所示的情况下,在人51在安全区域内时,他/她将被门操作器检测到,并且门将重新开启或停止关闭。
图2a示出根据本公开一实施例的具有具备安全区域30的摆动门的房间(50)(例如公共厕所)的俯视图。可看到摆动门操作器10具有保持门扇20的支臂。在图2b中,图2a的摆动门扇20已经几乎关闭,安全区域30已与摆动门扇20的角度位置成比例地减少。
图3为根据本发明一个实施例的摆动门操作器10的详细示意图,显示了用于在开启位置和关闭位置之间的摆动路径上移动摆动门扇20的摆动门操作器10。摆动门操作器10包括至少一个驱动单元100,其布置成在开启位置和关闭位置之间移动摆动门扇10。摆动门操作器10还包括控制单元103,其可操作地连接至驱动单元100和第一传感器106。第一传感器106构造成识别在摆动门扇20的第一侧201前方的对象,而控制单元103构造成在第一传感器106识别到在摆动门扇20的第一侧201前方的安全区域30中的对象时,做出反应。控制单元103还构造成基于摆动门扇20的摆动路径和摆动门扇20的位置调整安全区域的尺寸/面积。摆动包括门位置传感器109,以跟踪摆动门扇20的角度位置。门位置传感器109例如可以是角度传感器或陀螺仪。传感器109可以是马达101的内置传感器,例如用于计算马达的转数,使得控制单元103能计算出门扇20的对应位置。
在门扇关闭时,控制单元100构造成减少初始安全区域30的尺寸/面积,其中减小的面积为在摆动门扇20的当前摆动路径位置上、不在摆动门扇20的第一侧201前方的安全区域30的面积。若摆动门扇20的第一侧201前方的安全区域30中由第一传感器106识别出对象,控制单元103构造成停止摆动门扇20的移动,使得站在安全区域中的人不会被门扇撞击。在一个实施例中,控制单元103构造成在摆动门扇20的第一侧201前方的安全区域30中由第一传感器106识别出对象时,仅停止摆动门扇(20)的移动。
在一些实施例中,第一传感器106适于测量与被检测到的对象的距离,而在检测到安全区域30中的对象时,控制单元103的反应取决于与对象的所检测到的距离。例如,操作器可在与安全区域30中被检测到的对象的距离高于预设阈值时,减速摆动门扇20的移动,并在与安全区域30中被检测到的对象的距离低于预设阈值时,停止摆动门扇20的移动。可选地,将摆动门扇20的移动速度根据与安全区域30中被检测到的对象的检测距离来调整,使得门在撞到站在安全区域中的人之前平稳地停下来。若该人从安全区域中走出(例如进入房间),门可以提高速度并继续关闭门扇。
在一个实施例中,控制单元100构造成忽略在摆动门扇20的当前摆动路径位置上、不在摆动门扇20的第一侧201前方的安全区域30的面积中由第一传感器106检测到的对象。
如图6所示,摆动门操作器可包括(或连接到)第二传感器107,第二传感器107构造成识别在摆动门扇20的第二侧202前方的对象。控制单元103构造成在第二传感器107识别到在摆动门扇20的第二侧202前方的第二安全区域40中的对象时,做出反应。控制单元100继而构造成基于摆动门扇20的摆动路径和摆动门扇20的位置来调整第二安全区40的尺寸/面积。与现有技术相比,在门扇20的开启位置,门将不会检测放置在门后面的对象。
如图3所示,摆动门操作器还可以包括存储器111和通信器件112。控制单元103构造成基于存储器111中存储的限制信息设置安全区域30和/或第二安全区域40的最大尺寸。限制信息可经由与通信器件112的外部连接更改,使得可以使用定制的安全区域,或者因特定情况(例如,永久性障碍物带来的问题,或者必须将临时对象置于安全区域30或第二安全区域40的一部分中)而更改门的安全区域。
当摆动门操作器10停止摆动门扇20的移动时,摆动门扇20也可以被手动开启,使得人不会被门困在房间里。这一点尤其重要,门在公共厕所和橱柜这样的小房间(在这些地方通常没有其他出口的可能)里使用有明显的优势。
控制单元103还可构造成与传感器106配合,启动/激活并执行门操作器10的自主操作。当开启的门例如经由第一传感器106检测到人53正在穿过门框25时,摆动门扇的关闭可以自动启动。
本领域技术人员了解,本发明并不限于上述的优选实施例。本领域技术人员进一步了解,在所附权利要求书的范围内可以进行修改和变化。例如,第一传感器106和/或第二传感器107可以是能检测与扇形区域内对象的距离的任何合适的传感器。传感器也可以例如是放置在门扇20顶部边缘的、适于按照本发明进行控制的阵列传感器排。此外,通过对附图、公开内容和所附权利要求书的研究,在实施本发明的过程中,技术人员可以理解并实现对公开的实施方案的变化。