一种永磁同步驱动电机无需安装变压器的控制系统
文献发布时间:2023-06-19 18:34:06
技术领域
本发明是一种永磁同步驱动电机无需安装变压器的控制系统,属于新能源汽车领域。
背景技术
当前在新能源车领域广泛采用永磁同步电机作为驱动系统,该系统效率转换高,结构简单功率因素高,性能稳定成熟,体积小重量轻,价格合理;主要用于要求相应快速,调速范围宽,定位准确的高性能传动系统。
但是现有技术电机通常是基于PI控制器控制,使得若在汽车在行驶过程中电机旋变突发故障,电机旋变信号丢失的情况下将可能出现车失控风险。
发明内容
针对现有技术存在的不足,本发明目的是提供一种永磁同步驱动电机无需安装变压器的控制系统,以解决问题。
为了实现上述目的,本发明是通过如下的技术方案来实现:一种永磁同步驱动电机无需安装变压器的控制系统,包括以下步骤。
步骤1:通过电机控制器采集U、V、W三根相线提取电机转子位置信息;
步骤2:设立坐标轴q轴d轴q’轴d’轴,并将采集的转子信息分为a 型b型c型;
步骤3:高频正弦信号将在坐标轴上生成磁势Fh,通过电机的凸极效应,从而使其具有信号的坐标轴出现分量,产生磁链偏离现象;
步骤4:高频正弦信号在定子中生成旋转脉动磁场;
步骤5:电机的初始位置在START状态机下检测,然后,状态机变为START RUN,此时,会检查HFI初始位置检测的可靠性,即:是否已正确检测到电机的初始位置,若可靠,则状态机切换为RUN,否则为FAULT,在状态机RUN 期间,FOC通过HFI算法始终闭环跟踪转子位置:HFI使用PI环保持α=0,亦即:ihq=0,在状态机RUN期间,2个无传感器算法:HFI和观测器适时协同工作,以此实现电机的全速度范围运行。
通过上述技术方案:
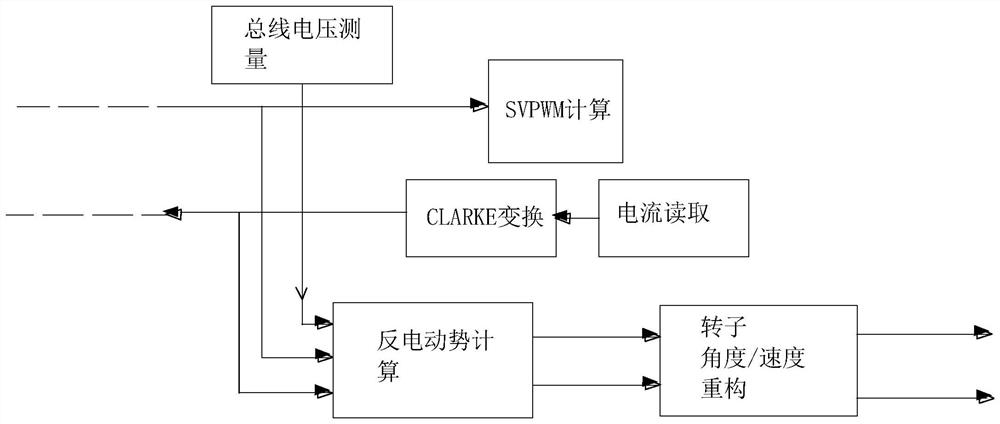
进一步地,采集的转子信息分为a型为表面贴式磁钢其中Ld=Lq,b型与c型均为内嵌式磁钢其中Ld 通过上述技术方案:可解决电机旋转变压器损坏的情况下继续驱动正常工作。 进一步地,所述高频正弦信号为200HZ~1KHZ的高频正弦信号。 通过上述技术方案:通过该信号可生成相应的磁势,由于电机的凸极效应,这样在坐标轴上会出现相应的分量产生磁链偏离现象。 进一步地,从反向最大速度到零速度,再到正向最大速度,两者的协同工作方式设有三种分为静止或低速段、高速段、中间速度段。 进一步地,所述静止或低速段时HFI和观测器同时工作,并由HFI提供位置信号,所述高速段时观测器工作并由其提供位置信号,所述中间速度段时HFI和观测器同时工作。 通过上述技术方案:根据不同的条件由其中之一提供位置号。 有益效果 本发明解决了在失去电机旋变信号丢失的情况下,电机控制器提取电机转子位置信息,还原丢失的旋变信息,继续驱动电机旋转从而应对紧急情况。 附图说明 通过阅读参照以下附图对非限制性实施例所作的详细描述,本发明的其它特征、目的和优点将会变得更明显: 图1为本发明读取转子定位测量的系统框架示意图; 图2为本发明采集转子信息a、b、c的结构示意图; 图3为本发明假设该信号在d’轴上的结构示意图; 图4为本发明根据图3所示γ(注入信号相位角,即:d’轴与d轴的夹角)与其它物理量的关系示意图; 图5为本发明α=0时电机的永磁转子的结构框架示意图; 图6为本发明初始角度检测示例一的示意图; 图7为本发明初始角度检测示例二的示意图; 图8为本发明初始角度检测示例三示意图; 图9为本发明初始角度检测示例四示意图; 图10为本发明高频信号在定子中生成旋转脉动磁场示意图; 图11为本发明电机转子初始位置的示意图; 图12为本发明电机导磁率μ的示意图; 图13为本发明电机运行时的位置检测系统框架示意图; 图14为本发明在状态机RUN期间,HFI使用PI环保持ihq=0的框架示意图; 图15为本发明HFI提供位置信号的示意图; 图16为本发明观测器提供位置信号的示意图。 具体实施方式 为使本发明实现的技术手段、创作特征、达成目的与功效易于明白了解,下面结合具体实施方式,进一步阐述本发明。 本发明提供一种永磁同步驱动电机无需安装变压器的控制系统技术方案:其结构包括如下步骤; 1)如图1、图2所示以当电机在低速时,BEMF也会变得非常小(当速度低于额度转速的5%时,位置检测会变的相当困难)通过电流读取转子a 型b型c型信息利用处理器进行CLARKE变换且根据总线电压测量数据根据普通的无传感器算法计算反电动势与重构转子角度/速度,例如I-PMSM电机的凸极特性可被用于低速/静止状态下的转子位置检测,因此在FOC的电压信号中注入一个高频信号,以此来估算电机的转子位置; 2)如图3-4所示假设转子位于某个角度上,在定子中注入一 200HZ~1KHZ的高频正弦信号,该信号位于假设的d’轴上,在d’轴上生成磁势Fh,由于电机的凸极效应,d轴的磁阻F 3)如图5-10所示利用磁链偏离现象的规律(检测电机的初始位置(电机起动前,FOC未工作),检测电机的实时位置(电机运行时,FOC工作)),检测初始位置时,一般认为电机是静止的;注入检测信号(高频电压信号),该信号在定子中生成旋转脉动磁场,我们分析λhq,当α=0时,可以清晰地显示电机的永磁转子的结构,当电机运时,FOC工作,该检测信号同步地跟随转子旋转,此时,保持α=0; 4)如图11-16所示电机转子初始位置的检测;当d轴找到后,必须辨别转子磁链的极性,即:南/北极,由于气隙磁场是定子和转子磁链的叠加,当定子的脉动磁链分别在南极和北极时,会导致电机导磁率μ不同,通过μ的不对称性的检测从而确定南/北极的方向,电机的初始位置在START状态机下检测;在该状态机期间,不会产生电磁力矩(基本可忽略),因此电机仍然是静止的,然后,状态机变为START RUN,此时,会检查HFI初始位置检测的可靠性,即:是否已正确检测到电机的初始位置,若可靠,则状态机切换为RUN,否则为FAULT(故障代码为speed feedback),在状态机 RUN期间,FOC通过HFI算法始终闭环跟踪转子位置:HFI使用PI环保持α=0,亦即:ihq=0,在状态机RUN期间,2个无传感器算法:HFI和观测器适时协同工作,以此实现电机的全速度范围运行,包括:从反向最大速度到零速度,再到正向最大速度,两者的协同工作方式如下:a.静止或低速段:HFI和观测器同时工作,并由HFI提供位置信号,b.高速段:观测器工作并由其提供位置信号,c.中间速度段:HFI和观测器同时工作,根据不同的条件由其中之一提供位置号。 本专利所说的普通的无传感器算法如:观测器,卡尔曼滤波等在估算电机的位置及速度时,是基于电机的反电动势(BEMF),而BEMF仅在电机转子运动时才能产生:eα=φmpωrcos(рωrt),eβ=-φmpωrsin(рωrt)。 针对I-PMSM电机的凸极特性,能够检测电机在静止或低速状态下的转子位置,a)SM-PMSM:表面贴式磁钢(Ld=Lq),b)内嵌式磁钢(Ld 以上显示和描述了本发明的基本原理和主要特征和本发明的优点,对于本领域技术人员而言,显然本发明不限于上述示范性实施例的细节,而且在不背离本发明的精神或基本特征的情况下,能够以其他的具体形式实现本发明。因此,无论从哪一点来看,均应将实施例看作是示范性的,而且是非限制性的,本发明的范围由所附权利要求而不是上述说明限定,因此旨在将落在权利要求的等同要件的含义和范围内的所有变化囊括在本发明内。不应将权利要求中的任何附图标记视为限制所涉及的权利要求。 此外,应当理解,虽然本说明书按照实施方式加以描述,但并非每个实施方式仅包含一个独立的技术方案,说明书的这种叙述方式仅仅是为清楚起见,本领域技术人员应当将说明书作为一个整体,各实施例中的技术方案也可以经适当组合,形成本领域技术人员可以理解的其他实施方式。
- 永磁同步电机的驱动控制系统及永磁同步电机模组
- 永磁同步电机的驱动控制系统及永磁同步电机模组