基于压力控制的阵列式液态金属微流道控制方法及系统
文献发布时间:2023-06-19 13:27:45
技术领域
本发明涉及液态金属控制技术领域,特别涉及一种基于压力控制的阵列式液态金属微流道控制方法及系统。
背景技术
以镓基合金为代表的液态金属,由于具有良好导电性、常温下连续流动性、大变形以及可操控等特点,近年得到极大关注,并在柔性电子、柔性传感及可重构射频系统等领域展现出优越的应用前景。在特定结构中如何高精度驱动控制液态金属连续流动,实现常规金、银、铜等金属材料无法达到的电长度任意重构功能特点,是该领域一直研究突破的关键难题。例如在超材料单元结构、射频天线结构中,利用液态金属的微流动控制,具有对常规超材料、射频天线结构的宽带调控及性能(频率、极化方式、方向图)重构能力。
目前,液态金属在微流道结构中驱动控制以压力控制和电压驱动控制为主。在液态金属阵列化图形应用中,考虑实际的精准分级控制、反馈闭环设计以及非消耗型使用寿命等因素,电压驱动方案并不适用。目前压力控制大多是针对单一微流道所做设计,控制方式较为简单。由于阵列化微流道存在多个各自独立的微流道结构,现有的压力控制方式对阵列化微流道中液态金属流态控制并不适用。
发明内容
针对现有技术存在的问题,本发明的第一目的在于提供一种能够对阵列化微流道内液态金属流态进行压力控制的控制系统。
本发明的第二目的在于提供一种基于上述控制系统的阵列式微流道液态金属流态控制方法。
本发明的第三目的在于提供一种执行上述控制方法的阵列式微流道液态金属流态控制装置。
本发明的第四目的在于提供一种计算机存储介质。
为实现上述目的,本发明第一方面提供一种基于压力控制的阵列式微流道控制系统,包括注射泵、第一管路、多条第二管路和控制器,所述注射泵与所述第一管路的输入端连接,所述第一管路的输出端分别与每条第二管路的输入端连接,每条第二管路的输出端对应于阵列式微流道结构中的每个微流道连接;其中,所述第一管路上设置有监测管路压力的传感器,每条第二管路上设置有控制第二管路导通或截止的控制阀;通过所述注射泵将推载流体经第一管路和多条第二管路泵入阵列式微流道结构的每个微流道;所述控制器根据所述传感器反馈的压力和预设规则选择性地控制注射泵的加注压力和所述第二管路的通断来控制阵列式微流道结构每个微流道中液态金属的流态。
进一步,所述第一管路上设置的传感器为液压传感器。
进一步,在所述液压传感器监测到所述第一管路压力大于等于预设阈值时,所述控制器控制所有第二管路全部关闭并控制所述注射泵停止工作。
进一步,在所述液压传感器监测到所述第一管路压力小于预设阈值时且所述第一管路压力大于等于所述第二管路的目标压力时,所述控制器控制对应的第二管路关闭。
进一步,在所述液压传感器监测到所述第一管路压力小于预设阈值时且所述第一管路压力小于等于所述第二管路的目标压力时,保持对应的第二管路打开。
进一步,所述推载流体为强碱性液体。
本发明第二方面提供一种阵列式微流道液态金属流态控制方法,利用第一方面所述的阵列式微流道控制系统进行控制,该控制方法包括如下步骤:
1)通过控制控制阀工作模态来控制第二管路全部打开;
2)控制注射泵工作向第一管路泵入推载流体;
3)比较监测到的第一管路压力与预设阈值;
4)在监测到的第一管路压力大于等于预设阈值时,控制第二管路全部关闭并控制注射泵停止工作;
5)在监测到的第一管路压力小于预设阈值时且所述第一管路压力大于等于所述第二管路的目标压力时,所述控制器控制对应的第二管路关闭;或者在监测到的第一管路压力小于预设阈值时且所述第一管路压力小于所述第二管路的目标压力时,保持对应的第二管路打开。
进一步,所述第二管路的目标压力根据微流道中液态金属流态预先设定。
本发明的第三方面提供一种阵列式微流道液态金属流态控制装置,包括:
一个或多个处理器;以及
存储装置,用于存储一个或多个程序,当所述一个或多个程序被所述一个或多个处理器执行时,使得所述一个或多个处理器实现如第二方面所述的控制方法。
本发明的第四方面提供一种计算机存储介质,所述存储器中存储有至少一条程序指令,所述至少一条程序指令被处理器加载并执行以实现如第二方面所述的控制方法。
本发明利用精准压力控制方法实现液态金属在微流道结构中的可重塑连续流动控制。且利用一个注射泵并配合控制阀和控制器就可以实现所有微流道内液态金属流态控制,具备空间小型化能力。
应当理解的是,以上的一般描述和后文的细节描述仅是示例性和解释性的,并不能限制本发明。
附图说明
为了更清楚地说明本发明实施例中的技术方案,下面将对实施例描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
图1为本发明一实施例的阵列式微流道中液态金属流态控制系统的结构框图;
图2为本发明阵列式微流道的结构示意图;
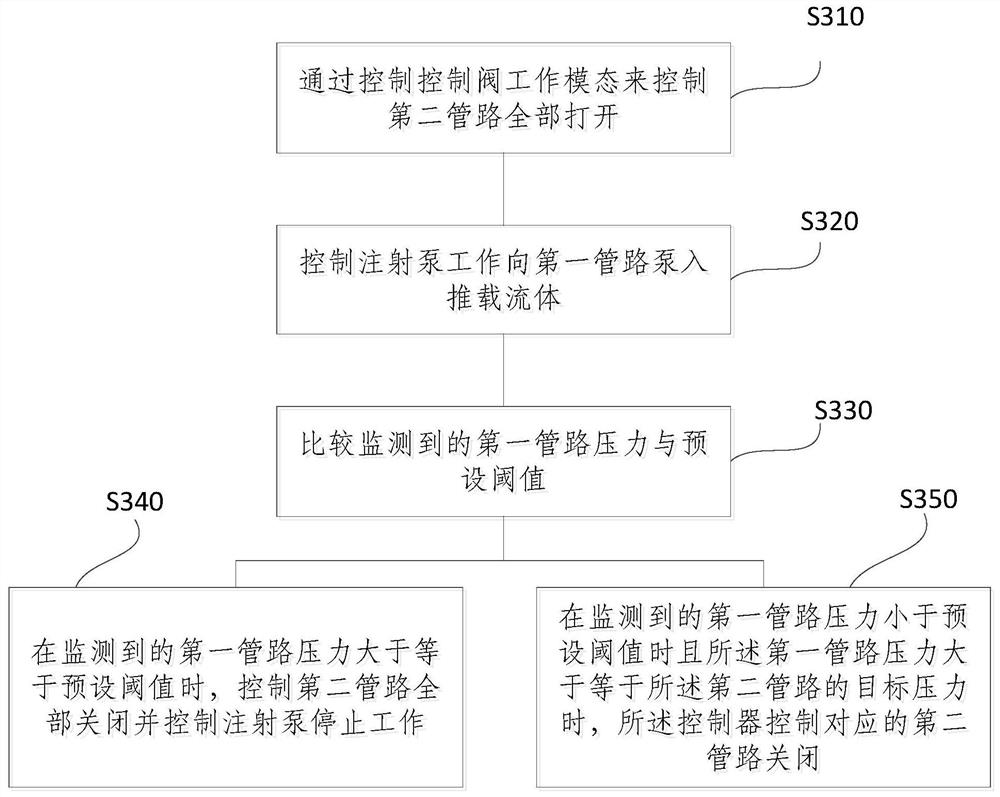
图3为本发明一实施例的阵列式微流道中液态金属流态控制方法的流程图。
具体实施方式
现在将参考附图更全面地描述示例实施方式。然而,示例实施方式能够以多种形式实施,且不应被理解为限于在此阐述的范例;相反,提供这些实施方式使得本发明将更加全面和完整,并将示例实施方式的构思全面地传达给本领域的技术人员。
此外,所描述的特征、结构或特性可以以任何合适的方式结合在一个或更多实施例中。在下面的描述中,提供许多具体细节从而给出对本发明的实施例的充分理解。然而,本领域技术人员将意识到,可以实践本发明的技术方案而没有特定细节中的一个或更多,或者可以采用其它的方法、组元、装置、步骤等。在其它情况下,不详细示出或描述公知方法、装置、实现或者操作以避免模糊本发明的各方面。
附图中所示的方框图仅仅是功能实体,不一定必须与物理上独立的实体相对应。即,可以采用软件形式来实现这些功能实体,或在一个或多个硬件模块或集成电路中实现这些功能实体,或在不同网络和/或处理器装置和/或微控制器装置中实现这些功能实体。
附图中所示的流程图仅是示例性说明,不是必须包括所有的内容和操作/步骤,也不是必须按所描述的顺序执行。例如,有的操作/步骤还可以分解,而有的操作/步骤可以合并或部分合并,因此实际执行的顺序有可能根据实际情况改变。
为使本发明的目的、技术方案和优点更加清楚,下面将结合附图对本发明实施方式作进一步地详细描述。
如图1所示,本发明的基于压力控制的阵列式微流道控制系统,包括注射泵1、第一管路2、多条第二管路3和控制器4,所述注射泵1与所述第一管路2的输入端连接,所述第一管路2的输出端分别与每条第二管路3的输入端连接,每条第二管路3的输出端对应于阵列式微流道结构5中的每个微流道连接;其中,所述第一管路2上设置有监测管路压力的传感器21,每条第二管路3上设置有控制第二管路3导通或截止的控制阀31;通过所述注射泵1将推载流体经第一管路2和多条第二管路3泵入阵列式微流道结构5的每个微流道;所述控制器4根据所述传感器21反馈的压力和预设规则选择性地控制注射泵1的加注压力和所述第二管路3的通断来控制阵列式微流道结构5每个微流道中液态金属的流态。其中所述第一管路2上设置的传感器21可以为液压传感器。推载流体为强碱性液体,以适应所推动液态金属的自身特性。阵列式微流道结构5参见图2,其中包括多个微流道51,微流道51内封闭有液态金属。
当流体在压力传感器中的管路中流动时,传感器感受其中的压力变化并将信号传送到控制器4中。该传感器适用多种流体,可用于气体和液体的压力测量,压力传感器测量误差小于量程的0.2%,测量范围从340mBar到7bar,响应时间小于20ms。
考虑驱动压力以及体积尺寸要求,选用可精确控制的一体式注射泵,额定工作最高压力1MPa(气压)、1.2MPa(水压);行程误差小于等于1%,重复误差0.3%-0.7%;线速度0.017~5mm/s,控制注入精度0.4154μl-2.0833μl;活塞最大驱动力大于等于100N;活塞次级驱动力大于等于45N;触液材质高硼硅玻璃、聚四氟乙烯,耐酸碱;液路最大承压参考正气压0~1Mpa,负气压0~0.05Mpa;管路接口为1/4-28UNF内螺纹接口;通信接口RS232/RS485/CAN总线。
面向强碱性液体压力控制需求,控制阀31可以采用电磁阀,电磁阀耐受最高压力2.5bar,供电DC12V,其中多条第二管路3由电磁阀控制打开关断。电磁阀通过控制器4进行控制,可实现单通道、分组通道以及全通道开关。
在所述液压传感器21监测到所述第一管路2压力大于等于预设阈值时,所述控制器4控制所有第二管路3全部关闭并控制所述注射泵1停止工作。根据第一管路1承压大小预设了压力安全值,在液压传感器21监测到第一管路1的压力大于等于压力安全值时,停止向第一管路1中注入推载流体并且控制所有第二管路3关闭,防止由于压力过大造成第一管路1和第二管路3损坏。在所述液压传感器21监测到所述第一管路2压力小于预设阈值时且所述第一管路2压力大于等于所述第二管路3的目标压力时,所述控制器4控制对应的第二管路3关闭。在第一管路2压力大于等于第二管路3的目标压力时,表示第二管路3注入的推载流体压力已经达到预定标准,由于第二管路3的目标压力与微流道内液态金属流态相对应,第二管路3的压力达到预定标准则依靠推载流体可以将微流动内液态金属流态调节到所需位置。在所述液压传感器21监测到所述第一管路2压力小于预设阈值时且所述第一管路2压力小于等于所述第二管路3的目标压力时,保持对应的第二管路3打开。此时,表示第二管路3注入的推载流体压力还没有达到预定标准,需要继续向第二管路3注入推载流体。通过电磁阀可以精确控制第二管路3注入流体的压力,进而精确控制微流道内液态金属的流态。
如图3所示,本发明的阵列式微流道液态金属流态控制方法,利用上述的阵列式微流道控制系统进行控制,该控制方法包括如下步骤:
步骤S310:通过控制控制阀工作模态来控制第二管路全部打开;
步骤S320:控制注射泵工作向第一管路泵入推载流体;
步骤S330:比较监测到的第一管路压力与预设阈值;
步骤S340:在监测到的第一管路压力大于等于预设阈值时,控制第二管路全部关闭并控制注射泵停止工作;
步骤S350:在监测到的第一管路压力小于预设阈值时且所述第一管路压力大于等于所述第二管路的目标压力时,所述控制器控制对应的第二管路关闭;或者在监测到的第一管路压力小于预设阈值时且所述第一管路压力小于所述第二管路的目标压力时,保持对应的第二管路打开。其中,所述第二管路的目标压力根据微流道中液态金属流态预先设定。
本发明的第三方面提供一种阵列式微流道液态金属流态控制装置,包括:
一个或多个处理器;以及
存储装置,用于存储一个或多个程序,当所述一个或多个程序被所述一个或多个处理器执行时,使得所述一个或多个处理器实现如上述的控制方法。
本发明的第四方面提供一种计算机存储介质,所述存储器中存储有至少一条程序指令,所述至少一条程序指令被处理器加载并执行以实现如上述的控制方法。
综上,本发明利用精准压力控制方法实现液态金属在柔性流道结构中的可重塑连续流动控制。该方法能够实现液态金属的高精度、大尺度流动,液态金属在流道结构中的位置可精确控制,且具备空间小型化能力。
根据本发明的实施例,上文参考流程图描述的过程可以被实现为计算机软件程序。例如,本发明的实施例包括一种计算机程序产品,其包括承载在计算机可读介质上的计算机程序,该计算机程序包含用于执行流程图所示的方法的程序代码。在这样的实施例中,该计算机程序可以通过通信部分从网络上被下载和安装,和/或从可拆卸介质被安装。在该计算机程序被中央处理单元(CPU)执行时,执行本申请的系统中限定的上述功能。
需要说明的是,本发明所示的计算机可读介质可以是计算机可读信号介质或者计算机可读存储介质或者是上述两者的任意组合。计算机可读存储介质例如可以是——但不限于——电、磁、光、电磁、红外线、或半导体的系统、装置或器件,或者任意以上的组合。计算机可读存储介质的更具体的例子可以包括但不限于:具有一个或多个导线的电连接、便携式计算机磁盘、硬盘、随机访问存储器(RAM)、只读存储器(ROM)、可擦式可编程只读存储器(EPROM或闪存)、光纤、便携式紧凑磁盘只读存储器(CD-ROM)、光存储器件、磁存储器件、或者上述的任意合适的组合。在本发明中,计算机可读存储介质可以是任何包含或存储程序的有形介质,该程序可以被指令执行系统、装置或者器件使用或者与其结合使用。而在本发明中,计算机可读的信号介质可以包括在基带中或者作为载波一部分传播的数据信号,其中承载了计算机可读的程序代码。这种传播的数据信号可以采用多种形式,包括但不限于电磁信号、光信号或上述的任意合适的组合。计算机可读的信号介质还可以是计算机可读存储介质以外的任何计算机可读介质,该计算机可读介质可以发送、传播或者传输用于由指令执行系统、装置或者器件使用或者与其结合使用的程序。计算机可读介质上包含的程序代码可以用任何适当的介质传输,包括但不限于:无线、电线、光缆、RF等等,或者上述的任意合适的组合。
附图中的流程图和框图,图示了按照本发明各种实施例的系统、方法和计算机程序产品的可能实现的体系架构、功能和操作。在这点上,流程图或框图中的每个方框可以代表一个模块、程序段、或代码的一部分,上述模块、程序段、或代码的一部分包含一个或多个用于实现规定的逻辑功能的可执行指令。也应当注意,在有些作为替换的实现中,方框中所标注的功能也可以以不同于附图中所标注的顺序发生。例如,两个接连地表示的方框实际上可以基本并行地执行,它们有时也可以按相反的顺序执行,这依所涉及的功能而定。也要注意的是,框图或流程图中的每个方框、以及框图或流程图中的方框的组合,可以用执行规定的功能或操作的专用的基于硬件的系统来实现,或者可以用专用硬件与计算机指令的组合来实现。
描述于本发明实施例中所涉及到的模块可以通过软件的方式实现,也可以通过硬件的方式来实现,所描述的模块也可以设置在处理器中。其中,这些模块的名称在某种情况下并不构成对该模块本身的限定。
应当注意,尽管在上文详细描述中提及了用于动作执行的设备的若干模块或者单元,但是这种划分并非强制性的。实际上,根据本发明的实施方式,上文描述的两个或更多模块或者单元的特征和功能可以在一个模块或者单元中具体化。反之,上文描述的一个模块或者单元的特征和功能可以进一步划分为由多个模块或者单元来具体化。
通过以上的实施方式的描述,本领域的技术人员易于理解,这里描述的示例实施方式可以通过软件实现,也可以通过软件结合必要的硬件的方式来实现。因此,根据本发明实施方式的技术方案可以以软件产品的形式体现出来,该软件产品可以存储在一个非易失性存储介质(可以是CD-ROM,U盘,移动硬盘等)中或网络上,包括若干指令以使得一台计算设备(可以是个人计算机、服务器、触控终端、或者网络设备等)执行根据本发明实施方式的方法。
本领域技术人员在考虑说明书及实践这里公开的发明后,将容易想到本发明的其它实施方案。本申请旨在涵盖本发明的任何变型、用途或者适应性变化,这些变型、用途或者适应性变化遵循本发明的一般性原理并包括本发明未公开的本技术领域中的公知常识或惯用技术手段。说明书和实施例仅被视为示例性的,本发明的真正范围和精神由下面的权利要求指出。
应当理解的是,本发明并不局限于上面已经描述并在附图中示出的精确结构,并且可以在不脱离其范围进行各种修改和改变。本发明的范围仅由所附的权利要求来限制。