一种尺蠖型压电推杆电机及其迟滞特性补偿方法
文献发布时间:2023-06-19 13:46:35
技术领域
本发明涉及压电驱动技术领域,是一种尺蠖型压电推杆电机及其迟滞特性补偿方法。
背景技术
精度、速度和行程的要求也越来越高。其中,驱动装置直接决定了平台的速度、精度、行程和整个系统的效率。
尺蠖型压电推杆电机是基于仿生学中的尺蠖爬行原理,利用逆压电效应将电能转化为机械能的驱动装置。尺蠖型压电推杆电机具有易于控制、推力大、精度高等优点,因此在某些大行程、高分辨率的精密定位领域,尺蠖型压电推杆电机更具有优势。然而尺蠖型压电推杆电机还存在以下不足:第一,定心导向结构不能使运动轴始终保持直线运动;第二,电机本体没有行程检测装置,不便于闭环控制;第三,上由于压电陶瓷堆绝缘层存之间在弹性形变、压电材料固有的迟滞以及蠕变等非线性特性的存在,尺蠖电机位移量与驱动电压不完全线性,会降低尺蠖电机定位精度。
发明内容
本发明为解决现有技术的不足,本发明提供了一种尺蠖型压电推杆电机及其迟滞特性补偿方法,本发明提供了以下技术方案:
一种尺蠖型压电推杆电机,所述电机包括:外壳,运动推杆,驱动单元,PCB霍尔传感器,磁编码贴片,直线轴承和驱动控制器;
所述驱动单元包括压电陶瓷堆叠和陶瓷片,使用螺栓将驱动单元固定在外壳内部,运动推杆安装在外壳、驱动单元、限位单元和外壳端盖的中心孔中;将直线轴承安装在外壳与运动推杆之间,在外壳端盖对应位置开有圆形孔,使得推杆电机能够始终保持直线运动;
安装在运动推杆表面所开的凹槽处,并在磁编码贴片与外壳的正对位置上安装有PCB霍尔传感器,使得对推杆行程进行检测,将PCB霍尔传感器输出信号与驱动控制器相连,通过PCB霍尔传感器检测超声型压电推杆电机的行程,然后与给定行程进行比较,输出调节信号,改变行程。
一种尺蠖型压电推杆电机的迟滞特性补偿方法,包括以下步骤:
步骤1:确定单输入单输出系统的输入输出迟滞特性,采用DUHEM模型描述迟滞引起的控制非线性特征;
步骤2:按照电压的上升和下降可以将模型迟滞的部分拆分为电压上升段和电压下降段;
步骤3:通过解析逆模型的前馈补偿消除迟滞对控制的影响,实现尺蠖电机输入电压与输出位移线性化一一对应,对尺蠖电机进行重复定位精度。
优选地,所述步骤1具体为:
单输入单输出系统的输入输出迟滞特性,通过下式确定:
其中,
为进行描述迟滞特性,建立DUHEM微分方程,通过下式表示所述方程:
其中,X(t)=d·u(t)为线性部分,d为输入输出之间的比例系数;h[u(t)]为迟滞状态变量,h(·)为迟滞算子;α为正常数,用于控制滞环大小;f(u)和g(u)为模型的参数函数,用于控制滞环形状;f(u)和g(u)二者均分段连续且满足以下条件:
f(·)单调递增,且满足
u>0时,
优选地,所述步骤2具体为:
针对DUHEM方程中含有的微分项,按照电压的上升和下降可以将模型迟滞的部分拆分为电压上升段和电压下降段:
对迟滞部分进行变形:
其中,参数函数f(·)与方向无关,近似表示上升与下降曲线的平均值,参数函数g(·)与方向都有关,近似表示上升斜率和下降斜率的平均数;
采用拟合方式求解上升曲线和下降曲线以及各自的斜率,利用多项式逼近DUHEM模型的两个参数函数,并将多项式系数归为待求解的参数,一同加入辨识过程,用于描述驱动足输入电压与驱动杆输出位移之间的迟滞特性。
优选地,所述步骤3具体为:
DUHEM模型中的逆模型参数通过DUHEM模型参数直接得到,基于逆函数定理,DUHEM方程的逆模型通过下式表示:
其中,h和u分别为逆模型输入和逆模型输出;将辨识得到的参数代入即可得到DUHEM逆模型方程,逆模型结构在中给出;
将DUHEM解析逆模型加入上位机期望位移输出信号中,并在上位机程序中给定位移指令,对比输入输出曲线,多次得出采用DUHEM逆模型前馈补偿的控制下,尺蠖电机定位系统的重复定位精度;
当尺蠖电机的目标位置L,在期望位移输入下得到的驱动杆实际位置输出为L
目标位置L的n次趋近所获得的位置偏差标准下不确定度的估算值表示:
目标位置重复定位精度R=4S;
采用多种信号测试更加精准的评判前馈补偿对于尺蠖电机定位精度的改善,包括延时、去程、返程以及往返快速作用的测试,评判迟滞模型在位移信号的上升下降过程中均可以做到输入输出一一对应,保证尺蠖电机的定位精度。
本发明具有以下有益效果:
本发明为基于仿生学中的尺蠖爬行原理,利用逆压电效应将电能转化为机械能的新型尺蠖型压电推杆电机,具有体积小、动作连续、推力大、精度高、易于控制等优点。该电机在某些大行程、高分辨率的精密定位领域更具有优势。
尺蠖型压电推杆电机采用运动推杆,能够直接输出直线运动。采用直线轴承与外壳端盖开有中心圆孔,具有定心导向,能使运动推杆始终保持直线运动。采用PCB霍尔传感器作为尺蠖型压电推杆电机行程检测,构成的闭环控制,定位精度高,容易控制,且抗干扰性高。尺蠖型压电推杆电机内装有限位保护装置,当推杆行程至极限位置时,电机停止运行,行程限位。与其他尺蠖型压电推杆电机相比具有结构简单等优点,并且可以根据需要设计成圆柱体和长方体形式或者进行小型化设计。
为了改善尺蠖电机控制过程中由于迟滞特性导致的定位误差,基于优化DUHEM逆模型的前馈控制方法,用于补偿尺蠖电机输入输出之间的迟滞特性,从而使得尺蠖电机期望位移与实际输出位移线性化一一对应,即给定指定的位移指令尺蠖电机驱动杆可以输出唯一、准确的位移量。
附图说明
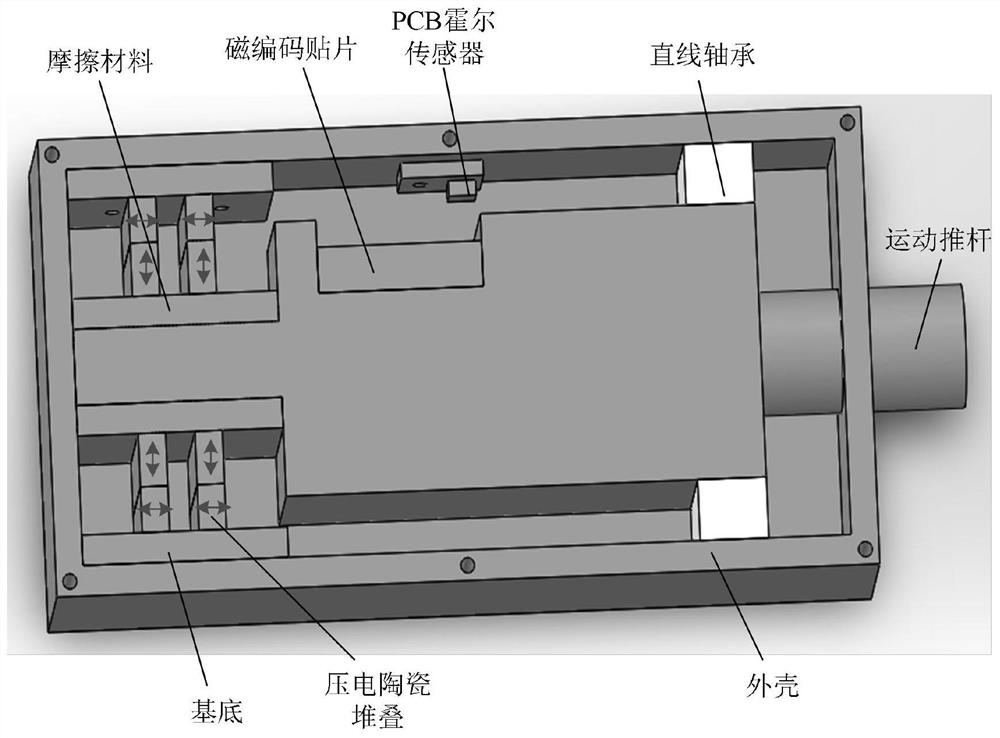
图1为尺蠖型压电推杆电机内部结构示意图;
图2为仿真软件中DUHEM逆模型结构;
图3为上位机加入DUHEM逆模型结构;
图4为同一目标位置的四种激励方式。
具体实施方式
以下结合具体实施例,对本发明进行了详细说明。
具体实施例一:
根据图1至图4所示,本发明提供一种尺蠖型压电推杆电机及其迟滞特性补偿方法,如图1所示,将由压电陶瓷等组成的驱动单元(包括压电陶瓷堆叠、陶瓷片)使用螺栓固定在外壳内部,运动推杆安装在外壳、驱动单元、限位单元和外壳端盖的中心孔中。将直线轴承(直线导轨)安装在外壳与运动推杆之间,同时在外壳端盖对应位置开有圆形孔,使得推杆电机能够始终保持直线运动。将磁编码片安装在运动推杆表面所开的凹槽处,并在磁编码贴片与外壳的正对位置上安装PCB霍尔传感器,使得能够对推杆行程进行检测。
将PCB霍尔传感器输出信号与驱动控制器相连,构成如图所示的闭环负反馈系统。通过PCB霍尔传感器检测超声型压电推杆电机的行程,然后与给定行程进行比较,输出调节信号,改变行程。在控制上采用基于DUHEM逆模型的前馈补偿控制可以有效地提升尺蠖电机定位精度。
针对迟滞特性影响尺蠖电机精度问题,提出基于优化DUHEM逆模型的尺蠖电机迟滞特性补偿控制方法。
考虑到尺蠖电机在控制过程中由迟滞引起的控制非线性,本发明提供一种尺蠖型压电推杆电机及其迟滞特性补偿方法,采用DUHEM模型描述该特征,再通过其解析逆模型的前馈补偿消除迟滞对控制的影响,实现尺蠖电机输入电压与输出位移线性化一一对应。
步骤1:广义DUHEM模型描述了单输入单输出系统的输入输出迟滞特性,其描述如下:
式中
为了能够准确的描述迟滞特性,提出如下所示的DUHEM微分方程:
式中X(t)=d·u(t)为线性部分,d为输入输出之间的比例系数;
h[u(t)]为迟滞状态变量,h(·)为迟滞算子;
α为正常数,用于控制滞环大小;
f(u)和g(u)为模型的参数函数,用于控制滞环形状,二者均分段连续且满足以下条件:
f(·)单调递增,且满足
u>0时,
步骤2:不同的参数搭配可以描述不同形状的滞环,但是找到可以精确描述电机迟滞特性的参数配比较为困难,DUHEM方程中含有微分项,按照电压的上升和下降可以将模型迟滞的部分拆分为电压上升段和电压下降段:
为了助于理解复杂的数学模型,再将表达式进一步变形为:
从表达式中可以看出参数函数f(·)与方向无关,近似可以表示上升与下降曲线的平均值,参数函数g(·)与方向都有关,近似可以表示上升斜率和下降斜率的平均数。采用拟合方式求解上升曲线和下降曲线以及各自的斜率,再通过公式的推导求解两个参数函数明显得不偿失。利用多项式逼近DUHEM模型的两个参数函数,并将其多项式系数归为待求解的参数,一同加入辨识过程,用于描述驱动足输入电压与驱动杆输出位移之间的迟滞特性。
步骤3:DUHEM模型的优势在于有解析逆模型,且逆模型参数可以通过DUHEM模型参数直接得到。基于逆函数定理,DUHEM方程的逆模型表达如下:
式中h和u分别为逆模型输入和逆模型输出;α、
为了验证辨识得到的DUHEM逆模型用于尺蠖电机前馈补偿控制对于定位精度的改善作用,将推出的DUHEM解析逆模型加入上位机期望位移输出信号中,如图3所示。并在上位机程序中给定位移指令,对比输入输出曲线,多次实验得出采用DUHEM逆模型前馈补偿的控制算法下,尺蠖电机定位系统的重复定位精度。
重复定位精度是重要的精度指标,在一定的距离内往复运动数次,数据经过处理后得到尺蠖电机定位系统的重复定位精度。假设尺蠖电机的目标位置L,在期望位移输入下得到的驱动杆实际位置输出为L
目标位置L的n次趋近所获得的位置偏差标准下不确定度的估算值表示:
参照国家标准定义目标位置重复定位精度R=4S。对于尺蠖电机定位平台,为了验证不同电压激励方式下采用前馈控制对于改善定位精度的有效性,采用不同方式给定五个不同的目标位置信号,如图4所示。采用多种信号测试的目的在于更加精准的评判前馈补偿对于尺蠖电机定位精度的改善作用,图中采用的测试方案包括延时、去程、返程以及往返快速作用的测试,可以评判迟滞模型在位移信号的上升下降过程中均可以做到输入输出一一对应,保证尺蠖电机的定位精度。
将四种不同方式的目标位置输入下得到的尺蠖电机驱动杆位移输出在表1中陈列,按照式(6)和(7)计算补偿前后不同目标位置下的平均偏差以及重复定位精度,并将其计算结果记录在表中。通过数据可以分析得到补偿前后尺蠖电机对于四个测试模型的定位精度从高到低依次排序如下:test4>test3>test2>test1,定位精度与往返路径的加入、输入位移反应时间均有关联。从测试结果也可以明显看出加入前馈补偿的控制方案重复定位精度明显高于补偿前,基于此判定本文辨识得到的DUHEM模型对于改善尺蠖电机定位精度的有效性。
表1引入补偿前后尺蠖电机重复定位误差
单位:μm
实验表明在目标位置为2.5μm时,尺蠖电机定位平台重复定位精度为±82nm,可以得出结论,采用基于DUHEM逆模型的前馈补偿控制可以有效地提升尺蠖电机定位精度。
以上所述仅是一种尺蠖型压电推杆电机及其迟滞特性补偿方法的优选实施方式,一种尺蠖型压电推杆电机及其迟滞特性补偿方法的保护范围并不仅局限于上述实施例,凡属于该思路下的技术方案均属于本发明的保护范围。应当指出,对于本领域的技术人员来说,在不脱离本发明原理前提下的若干改进和变化,这些改进和变化也应视为本发明的保护范围。