一种适用于无人机的运输容器及其使用方法
文献发布时间:2023-06-19 13:49:36
技术领域
本发明涉及用于物件运输的容器技术领域,尤其涉及一种适用于无人机的运输容器。
背景技术
无人机是利用无线电遥控设备和自备的程序控制装置操纵的不载人飞机,小型无人机若想要载物通常需要配置容器。
无人机设计时,为了飞行的稳定性通常会尽可能的将无人机的重心设计在过无人机几何中心且垂直于水平地面的线上;但使用无人机运输物品(急救药品、快递等)时,运输的物品固定在无人机上后会改变无人机整体(包含容器与容器内的物品)的重心,迫使无人机重心偏斜进而影响无人机飞行的稳定性甚至导致无人机电量额外消耗以及无人机旋翼和旋翼臂之间的异常磨损(因飞行偏斜造成的磨损)。
因此,需要一种能够自动摆放放入容器的待运输物品(自动调整待运输物品相对于无人机的空间位置)进而减少运载货物对无人机飞行影响的运输容器。
发明内容
本申请实施例通过提供一种适用于无人机的运输容器,解决了现有技术中无人机在运输物品时容易因为所运输的物品的放置位置影响无人机自身飞行稳定性甚至导致无人机电量额外消耗以及无人机旋翼和旋翼臂之间异常磨损的技术问题,实现了无人机上用于放置物品的容器能够自动调整待运输物品相对于无人机的空间位置进而减少运载货物对无人机飞行的影响的技术效果。
本申请实施例提供了一种适用于无人机的运输容器,包括柱形容器、动力组件和控制单元,还包括称重移位组件、定位滑动柱和定位气囊体;
所述的柱形容器包括容器主体、上盖和组合组件,容器主体为顶部开口的空心柱形,上盖可拆卸定位在容器主体上,组合组件用于将柱形容器固定在无人机上;组合后,无人机的重心落在运输容器的轴线上;
所述的称重移位组件的数量为三个,两两对称,包括底座、称重传感器、转动盘、支撑盘、转动盘驱动组件和移位组件;
所述的底座定位在所述的容器主体的底部,用于定位所述的称重传感器,称重传感器用于检测运输容器内物品对该称重移位组件造成的压力;
所述的支撑盘固定在所述的称重传感器的顶部;
所述的转动盘绕自身轴线可转动定位在支撑盘上;
所述的移位组件定位在转动盘上,结构为滚轮或传送带;
所述的定位滑动柱滑动定位在所述的上盖上,内置弹簧,用于夹紧定位运输容器内部的物品;
所述的定位气囊体定位在所述的上盖上,用于通过膨胀的方式实现物品的定位。
优选的,所述移位组件包括转动柱、导力带和导向轮;
所述的转动柱为圆柱形,数量为多根,多根转动柱长短不一但轴向相同,密布在所述的转动盘上;
所述的转动柱上均定位有与所述的导力带配合的柱身凹槽,柱身凹槽为环形槽;
所述的导力带主体为环形,与单个移位组件的所有转动柱均接触;
所述的导向轮定位在所述的转动盘的内部,用于为所述的导力带换向;
所述的移位驱动组件为电机,单个移位组件中至少有一个导向轮定位在所述的移位驱动组件上。
优选的,所述定位滑动柱滑动定位在所述的上盖上,包括滑动柱主体、蓄力弹簧、固定板、浮动块和软质板;
所述的滑动柱主体为空心柱形,内部设置有两个蓄力弹簧;
所述的蓄力弹簧为压簧,定位在所述的固定板的两端,用于积蓄和释放弹性势能进而辅助所述的定位滑动柱夹紧待运输物品;
所述的固定板贯穿所述的滑动柱主体且固定在所述的上盖上,用于隔开两个蓄力弹簧;
所述的浮动块的数量为两个,主体为块形,球接在所述的滑动柱主体的两端;
所述的软质板的数量为两个,定位在所述的浮动块远离所述的滑动柱主体的一端,用于与待运输物品直接接触进而减少因夹紧对待转运物品的损坏。
优选的,所述定位气囊体包括第一气囊体、第二气囊体、导通管路、单向阀、气路截断组件和截断组件控制开关;
所述的第一气囊体和第二气囊体结构相同且以所述的上盖为对称线对称设置,二者通过所述的导通管路相连通;
所述的导通管路上定位有单向阀和气路截断组件,气路截断组件受控于所述的截断组件控制开关用于阻断导通管路。
优选的,所述容器主体的内壁上定位有弹性兜网定位凸起,弹性兜网定位凸起为弧形杆,数量为多个,均布在容器主体的内壁上,用于定位弹性网兜,所述的弹性网兜由弹性材料制成,为网状结构,物品放入后将弹性网兜从弹性兜网定位凸起上拆卸,弹性网兜自动包覆在待运输物品上将多个物品包在一起。
优选的,所述定位滑动柱的浮动块上定位有安置孔,安置孔用于定位气体发生组件;
所述的软质板上设置有通孔,用于安置所述的气体发生组件;
还包括坠落防护组件,坠落防护组件包括气体发生组件、隐藏囊体组件和容器外置拼接框架;
所述的气体发生组件用于在所述的定位滑动柱受冲击时快速释放气体;
所述的隐藏囊体组件包括囊体主体、囊体定位环、弹性膜、弹性膜定位环、密封组件和弹性膜定位环固定组件;
所述的囊体主体为环形,横截面为U形,定位在所述的容器主体和容器外置拼接框架之间,为橡胶材质;
所述的囊体定位环固定在所述的容器主体上,空间位置上位于所述的容器主体的顶部开口的周圈,用于定位所述的囊体主体;
所述的囊体主体的一端固定在所述的容器主体的侧壁上,另一端固定在所述的囊体定位环上;
所述的弹性膜为橡胶材质的圆形薄膜,固定在所述的弹性膜定位环上;
所述的弹性膜定位环通过所述的弹性膜定位环固定组件可拆卸固定连接在所述的囊体定位环上,空间位置上位于所述的囊体定位环的上方;
所述的囊体定位环和弹性膜定位环之间定位有密封组件;
所述的弹性膜、弹性膜定位环、囊体定位环、囊体主体和容器主体组合而成了一个密封的仓体,该仓体在气体发生组件运行时膨胀,缓冲对运输物品的冲击;
所述的容器外置拼接框架的整体为环形,由多个弧形板组成,定位在所述的容器主体的侧壁上。
优选的,所述气体发生组件包括气体压缩罐和压缩罐支撑框架;
所述的气体压缩罐包括两个桶形的罐体单元,两个罐体单元相对设置且二者之间定位有橡胶密封体,压缩罐支撑框架为框架结构,两个罐体单元装入所述的压缩罐支撑框架和橡胶密封体一起组成了一个密封的罐体,其内部填充有压缩气体;
压缩罐支撑框架可拆卸固定连接在所述的浮动块上,由硬质塑料或玻璃材料制成;
在所述的压缩罐支撑框架受到冲击导致自身破裂后所述的气体压缩罐释放自身内部的压缩气体。
优选的,所述定位滑动柱和所述的上盖上定位有滑动锁止组件,滑动锁止组件的结构为销和销孔的组合,用于锁止所述的定位滑动柱与所述的上盖之间的相对运动,进而减少所述的定位滑动柱在受冲击时传导向运输容器内物品的力。
本申请实施例中提供的一个或多个技术方案,至少具有如下技术效果或优点:
通过在运输容器内部设置多个均布的称重移位组件,通过对比多个称重移位组件的测量数据判断将容器内的物品的最佳位置并依据该结果控制移位组件运行进而移动待运输物品,利用气囊膨胀方式固定待转运的物品;有效解决了现有技术中无人机在运输物品时容易因为所运输的物品的放置位置影响无人机自身飞行稳定性甚至导致无人机电量额外消耗以及无人机旋翼和旋翼臂之间异常磨损的技术问题;进而实现了无人机上用于放置物品的容器能够自动调整待运输物品相对于无人机的空间位置进而减少运载货物对无人机飞行的影响的技术效果。
附图说明
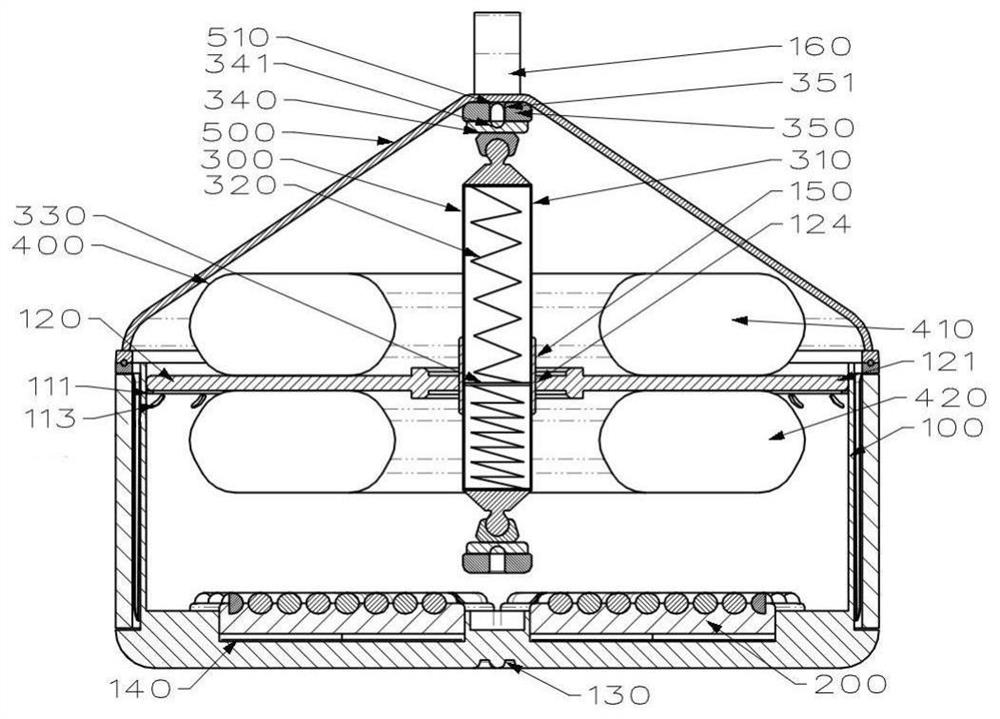
图1为本发明适用于无人机的运输容器的剖视图;
图2为本发明适用于无人机的运输容器的外观结构示意图;
图3为本发明适用于无人机的运输容器的底部结构示意图;
图4为本发明适用于无人机的运输容器的内部结构示意图;
图5为本发明适用于无人机的运输容器的局部剖视图;
图6为本发明适用于无人机的运输容器的定位气囊体与上盖之间的位置关系示意图;
图7为本发明适用于无人机的运输容器的定位气囊体的结构简图;
图8为本发明适用于无人机的运输容器的称重移位组件的结构示意图;
图9为本发明适用于无人机的运输容器的称重移位组件的剖视图;
图10为本发明适用于无人机的运输容器的弹性网兜与柱形容器之间的位置关系示意图;
图11为本发明适用于无人机的运输容器的气体囊的结构简图;
图12为本发明适用于无人机的运输容器的气体压缩罐与压缩罐支撑框架的结构示意图;
图13为本发明适用于无人机的运输容器的容器主体的结构示意图;
图14为本发明适用于无人机的运输容器的囊体主体的结构示意图;
图15为本发明适用于无人机的运输容器的弹性膜的结构示意图;
图16为本发明适用于无人机的运输容器的弹性膜与弹性膜定位环的结构示意图;
图17为本发明适用于无人机的运输容器的弧形板的结构示意图;
图18为本发明适用于无人机的运输容器的控制流程图;
图19为本发明适用于无人机的运输容器的定位滑动柱的结构示意图;
图20为本发明适用于无人机的运输容器的定位滑动柱的剖视图;
图中:
柱形容器100、容器主体110、环形凸起111、凸块112、弹性兜网定位凸起113、弹性网兜114、上盖120、上盖主体121、上盖定位组件122、定位凹槽123、导向管定位孔124、组合组件130、移位组件安置孔140、中心导向管150、起落架160;
称重移位组件200、底座210、称重传感器220、转动盘230、支撑盘240、转动盘驱动组件250、移位组件260、转动柱261、导力带262、导向轮263、柱身凹槽264、移位驱动组件270;
定位滑动柱300、滑动柱主体310、蓄力弹簧320、固定板330、浮动块340、安置孔341、软质板350、通孔351;
定位气囊体400、第一气囊体410、第二气囊体420、导通管路430、第一导通管431、第二导通管432、单向阀440、第一单向阀441、第二单向阀442、气路截断组件450、第一截断组件451、第二截断组件452、截断组件控制开关453;
坠落防护组件500、气体发生组件510、气体囊511、气体囊体破碎触发组件512、气体压缩罐513、压缩罐支撑框架514、隐藏囊体组件520、囊体主体521、囊体定位环522、弹性膜523、弹性膜定位环524、密封组件525、弹性膜定位环固定组件526、容器外置拼接框架530、弧形板531。
具体实施方式
为了便于理解本发明,下面将参照相关附图对本申请进行更全面的描述;附图中给出了本发明的较佳实施方式,但是,本发明可以以许多不同的形式来实现,并不限于本文所描述的实施方式;相反地,提供这些实施方式的目的是使对本发明的公开内容理解的更加透彻全面。
需要说明的是,本文所使用的术语“垂直”、“水平”、“上”、“下”、“左”、“右”以及类似的表述只是为了说明的目的,并不表示是唯一的实施方式;为了叙述的方便,下文中使用“运输容器”代指“本申请适用于无人机的运输容器”。
除非另有定义,本文所使用的所有的技术和科学术语与属于本发明的技术领域的技术人员通常理解的含义相同;本文中在本发明的说明书中所使用的术语只是为了描述具体的实施方式的目的,不是旨在于限制本发明;本文所使用的术语“和/或”包括一个或多个相关的所列项目的任意的和所有的组合。
请参阅图1,为发明适用于无人机的运输容器的剖视图;本申请适用于无人机的运输容器包括柱形容器100、称重移位组件200、定位滑动柱300和定位气囊体400;本申请通过在运输容器内部设置多个均布的称重移位组件200,通过对比多个称重移位组件200的测量数据判断将容器内的物品的最佳位置并依据该结果控制移位组件260运行进而移动待运输物品,利用气囊膨胀方式固定待转运的物品。
实施例一
如图1所示,本申请适用于无人机的运输容器包括柱形容器100、称重移位组件200、定位滑动柱300、定位气囊体400、动力组件和控制单元。
如图1、图3和图13所示,所述的柱形容器100包括容器主体110、上盖120、组合组件130、移位组件安置孔140、中心导向管150和起落架160;所述的容器主体110为顶部开口的空心圆柱形,用于容纳待运输的物品并起到支撑定位所述的称重移位组件200;所述的上盖120为圆形板,其轴线与所述的容器主体110的轴线相同,可拆卸定位在所述的容器主体110上,起到封闭所述的容器主体110的作用;所述的组合组件130定位在所述的容器主体110的底部,用于将所述的柱形容器100固定在无人机的底部,其结构能够是螺纹、卡扣等;运输容器和无人机组合后,无人机的重心落在运输容器的轴线上;所述的移位组件安置孔140定位在所述的容器主体110内部空腔的底部,数量与所述的称重移位组件200的数量相同,用于安置所述的称重移位组件200;所述的中心导向管150定位在所述的上盖120上,轴线与所述的上盖120重合,主体为管形,起到为所述的定位滑动柱300导向的作用;所述的起落架160定位(直接固定或间接固定)在所述的容器主体110的侧壁上,主体为杆形,用于便于无人机的起落。
进一步的,如图1和图4所示,所述的容器主体110包括环形凸起111和凸块112;所述的环形凸起111的主体为环形,固定在所述的容器主体110的内壁上或与所述的容器主体110一体成型;所述的环形凸起111空间位置上位于所述的上盖120的下方,用于定位所述的上盖120;所述的凸块112空间位置上位于所述的上盖120的上方,数量为多个,形状为块体,用于配合所述的环形凸起111定位所述的上盖120;所述的上盖120包括上盖主体121、上盖定位组件122和导向管定位孔124;所述的上盖主体121为圆形板,通过所述的上盖定位组件122可拆卸定位在所述的容器主体110的内壁上;所述的上盖定位组件122优选为定位凹槽123,所述的定位凹槽123为所述的上盖主体121侧壁上的豁口,数量与所述的凸块112相同,用于与所述的凸块112配合实现所述的上盖120的定位;实际使用时,仅需按下并旋转所述的上盖120即可实现上盖120的固定。
如图4、图8和图9所示,所述的称重移位组件200的数量优选为3个,3个称重移位组件200两两对称定位在所述的柱形容器100内部空间的底部;如图9所示,所述的称重移位组件200包括底座210、称重传感器220、转动盘230、支撑盘240、转动盘驱动组件250和移位组件260;所述的底座210用于支撑定位所述的称重传感器220,固定在所述的移位组件安置孔140的底部,所述的称重传感器220用于检测物品对该称重移位组件200造成的压力,其与所述的控制单元电连接;所述的支撑盘240固定在所述的称重传感器220的顶部,用于支撑定位所述的转动盘驱动组件250;所述的转动盘230定位在所述的转动盘驱动组件250上且绕自身轴线可转动固定连接在所述的支撑盘240上;所述的移位组件260定位在所述的转动盘230上,在移位驱动组件270的驱动下运行,结构为滚轮或传送带,与待运输的物品直接接触,用于在所述的控制单元的控制下利用摩擦力移动待运输的物品;所述的称重移位组件200高出所述的容器主体110内部空间的底部5至20毫米。
优选的,所述称重传感器220为应变片称重传感器。
优选的,所述的转动盘驱动组件250为电机。
优选的,如图9所示,所述的移位组件260包括转动柱261、导力带262和导向轮263;所述的转动柱261为圆柱形,数量为多根,多根转动柱261长短不一但轴向相同,密布在所述的转动盘230上;所述的转动柱261上均定位有与所述的导力带262配合的柱身凹槽264,柱身凹槽264为环形槽;所述的导力带262主体为环形,材质优选为橡胶,与单个移位组件260的所有转动柱261均接触;所述的导向轮263定位在所述的转动盘230的内部,用于为所述的导力带262换向;所述的移位驱动组件270为电机,单个移位组件260中至少有一个导向轮263定位在所述的移位驱动组件270上。
优选的,所述的导力带262上定位有齿,所述的转动柱261上定位有与所述的导力带262配合的槽。
如图1、图2、图19和图20所示,所述的定位滑动柱300滑动定位在所述的上盖120上,包括滑动柱主体310、蓄力弹簧320、固定板330、浮动块340和软质板350;所述的滑动柱主体310为空心柱形,内部设置有两个蓄力弹簧320;所述的蓄力弹簧320为压簧,定位在所述的固定板330的两端,用于积蓄和释放弹性势能进而辅助所述的定位滑动柱300夹紧待运输物品;所述的固定板330贯穿所述的滑动柱主体310且固定在所述的中心导向管150上,用于隔开两个蓄力弹簧320;所述的浮动块340的数量为两个,主体为块形,球接在所述的滑动柱主体310的两端;所述的软质板350的数量为两个,定位在所述的浮动块340远离所述的滑动柱主体310的一端,优选为圆柱形,材质优选为海绵,用于与待运输物品直接接触进而减少因夹紧对待转运物品的损坏。
如图1、图6和图7所示,所述的定位气囊体400用于通过膨胀的方式挤压容器内部运输的物品进而实现物品的定位;所述的定位气囊体400包括第一气囊体410、第二气囊体420、导通管路430、单向阀440、气路截断组件450和截断组件控制开关453;所述的第一气囊体410和第二气囊体420结构相同且以所述的上盖120为对称线对称设置,二者通过所述的导通管路430相连通;所述的导通管路430上定位有单向阀440和气路截断组件450,气路截断组件450受控于所述的截断组件控制开关453用于阻断导通管路430。
进一步的,如图7所示,所述的导通管路430包括第一导通管431和第二导通管432;所述的第一导通管431和第二导通管432上均定位有单向阀440,分别为第一单向阀441和第二单向阀442;第一导通管431和第二导通管432中气体流动方向不同;所述的第一导通管431和第二导通管432上均定位有气路截断组件450,分别为第一截断组件451和第二截断组件452;气路截断组件450的结构优选为阀或夹子;所述的截断组件控制开关453优选为按钮开关,数量为两组,两组按钮开关分别定位在所述的上盖主体121的两端。
优选的,为了减少利用定位气囊体400固定容器内物品所用的时间,所述的第一气囊体410和第二气囊体420的大小结构均相同,所述的上盖120翻转进行使用(即若该次转运时第一气囊体410位于容器主体110内部,则下次转运物品时第二气囊体420位于容器主体110内部)。
为了实现多件物品放入同一容器仍然能够自动摆放且能够使待转运的物品的重心靠近无人机重心(靠近过无人机重心且垂直于水平地面的线),如图1和图10所示,优选的,所述的容器主体110的内壁上定位有弹性兜网定位凸起113,弹性兜网定位凸起113为弧形杆,数量为多个,均布在容器主体110的内壁上,用于定位弹性网兜114,所述的弹性网兜114由弹性材料制成,为网状结构,物品放入后将弹性网兜114从弹性兜网定位凸起113上拆卸,弹性网兜114自动包覆在待运输物品上将多个物品包在一起。
所述的动力组件用于为运输容器各部件的运行提供动力,优选为电池。
如图18所示,所述的控制单元用于控制运输容器各部件的协调运行(控制所述的转动盘驱动组件250和移位驱动组件270的运行),为逻辑控制器。
进一步的,如图4所示,一个运输容器上设置有三个称重移位组件200,三个称重移位组件200的称重传感器220分别为第一称重传感器、第二称重传感器和第三称重传感器,三个称重传感器220将自身检测到的重量信息传递给所述的控制单元,控制单元对比得到的三个值去控制所述的转动盘驱动组件250和移位驱动组件270的运行进而驱动所述的转动盘230的转动和所述的移位组件的运行进而将令待转运的物品的重心靠近无人机重心。
优选的,所述的控制单元的型号为西门子S7-200。
本申请实施例实际使用时,使用人员首先将运输容器顶部(开口)朝上放置在平面上,而后将待运输的物品放入运输容器,放入运输容器的待运输物品与称重移位组件200直接接触,如图9所示,待运输物品因其放置位置会对三个不同的称重移位组件200造成不同的压力,称重传感器220分别检测不同称重移位组件200所受压力并将检测到的压力转化为电信号传递给控制单元,控制单元依据自身所接收的电信号控制转动盘驱动组件250和移位组件260运行(转动盘驱动组件250在此时所起到的作用为控制移位组件260移动待运输物品的方向),利用摩擦力改变运输物品的空间位置进而使待转运物品的重心靠近无人机重心(靠近过无人机重心且垂直于水平地面的线);如图1所示,此后组装所述的上盖120并将所述的定位滑动柱300拉起三至五秒(拉起定位滑动柱300的目的在于让所述的称重移位组件200自动摆好待运输的物品,防止因上盖120的组装移动了待转运物品的空间位置),松开所述的定位滑动柱300使定位滑动柱300夹紧待运输的物品;根据需要按下所述的截断组件控制开关453,将所述的第一气囊体410和第二气囊体420连通,按压位于所述的上盖120上方的定位气囊体400,使位于所述的容器主体110内部的定位气囊体400膨胀进而固定待运输的物品;最后将柱形容器100通过所述的组合组件130组装到无人机底部。
上述本申请实施例中的技术方案,至少具有如下的技术效果或优点:
解决了现有技术中无人机在运输物品时容易因为所运输的物品的放置位置影响无人机自身飞行稳定性甚至导致无人机电量额外消耗以及无人机旋翼和旋翼臂之间异常磨损的技术问题,实现了无人机上用于放置物品的容器能够自动调整待运输物品相对于无人机的空间位置进而减少运载货物对无人机飞行的影响的技术效果。
实施例二
为了降低运输容器中的正在运输的物品损坏的概率,防止因无人机故障甚至坠落后损伤正在运输的物品;本申请实施例在上述实施例的基础上增设了坠落防护组件500,并对定位滑动柱300的结构做了适应性修改,具体为:
如图1所示,所述的定位滑动柱300的浮动块340上定位有安置孔341,安置孔341用于定位气体发生组件510;所述的软质板350上设置有通孔351,用于安置所述的气体发生组件510。
所述的坠落防护组件500包括气体发生组件510、隐藏囊体组件520和容器外置拼接框架530;所述的气体发生组件510用于在所述的定位滑动柱300受冲击时快速释放气体(一个运输容器对应一个气体发生组件510);如图13至16所示,所述的隐藏囊体组件520包括囊体主体521、囊体定位环522、弹性膜523、弹性膜定位环524、密封组件525和弹性膜定位环固定组件526;所述的囊体主体521如图5和图14所示,为环形,横截面为U形,定位在所述的容器主体110和容器外置拼接框架530之间,为橡胶材质(橡胶薄膜),膨胀后起到保护所述的容器主体110的作用;所述的囊体定位环522固定在所述的容器主体110上,空间位置上位于所述的容器主体110的顶部开口的周圈,用于定位所述的囊体主体521;所述的囊体主体521的一端固定在所述的容器主体110的侧壁上,另一端固定在所述的囊体定位环522上;如图15和图16所示,所述的弹性膜523为橡胶材质的圆形薄膜,固定在所述的弹性膜定位环524上;所述的弹性膜定位环524通过所述的弹性膜定位环固定组件526可拆卸固定连接在所述的囊体定位环522上,空间位置上位于所述的囊体定位环522的上方;所述的囊体定位环522和弹性膜定位环524之间定位有密封组件525;所述的弹性膜523、弹性膜定位环524、囊体定位环522、囊体主体521和容器主体110组合而成了一个密封的仓体,该仓体在气体发生组件510运行时膨胀,缓冲对运输物品的冲击;如图10和图17所示,所述的容器外置拼接框架530的整体为环形,由多个弧形板531组成,定位(可拆卸固定或直接固定)在所述的容器主体110的侧壁上;无人机下降时若为非正常降落,即下落的冲击力较大则会导致容器外置拼接框架530受传导自起落架160的力的冲击导致部分弧形板531脱落,进而导致所述的气体发生组件510受激释放气体;所述的囊体主体521空间位置上位于所述的弧形板531和容器主体110之间,在所述的囊体主体521膨胀时将剩余所述的容器外置拼接框架530撑开,使所述的容器外置拼接框架530脱离所述的容器主体110。
进一步的,所述的弹性膜定位环固定组件526为卡扣结构。
优选的,所述的组合组件130的运行受控于所述的控制单元或无人机的控制单元,本申请运输容器可以直接用于空投。
优选的,所述的密封组件525为橡胶圈。
优选的,所述的囊体定位环522和弹性膜定位环524的大小形状均相同。
进一步的,如图11所示,所述的气体发生组件510包括气体囊511和气体囊体破碎触发组件512;所述的气体囊511内部填充有压缩气体且可拆卸固定连接在所述的浮动块340上;所述的气体囊体破碎触发组件512定位在所述的气体囊511上,空间位置上位于所述的气体囊511远离所述的浮动块340的一端;所述的气体囊体破碎触发组件512的结构能够是锥子,在所述的气体囊体破碎触发组件512受冲击时刺破所述的气体囊511释放其内部的气体。
优选的,如图12所示,所述的气体发生组件510包括气体压缩罐513和压缩罐支撑框架514;所述的气体压缩罐513包括两个桶形的罐体单元,两个罐体单元相对设置且二者之间定位有橡胶密封体,压缩罐支撑框架514为框架结构,两个罐体单元装入所述的压缩罐支撑框架514和橡胶密封体一起组成了一个密封的罐体,其内部填充有压缩气体;压缩罐支撑框架514可拆卸固定连接在所述的浮动块340上,由硬质塑料或玻璃材料制成,容易受冲击导致破碎;在所述的压缩罐支撑框架514受到冲击导致自身破裂后所述的气体压缩罐513释放自身内部的压缩气体。
优选的,所述的定位滑动柱300和所述的上盖120上定位有滑动锁止组件,滑动锁止组件的结构为销和销孔的组合,用于锁止所述的定位滑动柱300与所述的上盖120之间的相对运动,进而减少所述的定位滑动柱300在受冲击时传导向运输容器内物品的力。
本申请实施例实际使用时:在按压位于所述的上盖120上方的定位气囊体400,使位于所述的容器主体110内部的定位气囊体400膨胀进而固定待运输的物品后将所述的定位滑动柱300再次提起并运行滑动锁止组件将定位滑动柱300固定;而后将气体发生组件510固定在远离所述的柱形容器100的浮动块340上;随后将所述的弹性膜定位环524固定在所述的囊体定位环522上;最后将柱形容器100通过所述的组合组件130组装到无人机上。
上述本申请实施例中的技术方案,至少具有如下的技术效果或优点:
进一步的提高了本申请适用于无人机的运输容器的实用性以及该容器对容器内物品的保护力度。
以上所述仅为本发明的优选实施方式,并不用于限制本发明,对于本领域技术人员来说,本发明可以有各种更改和变化。凡在本发明精神和原则内,所作的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。