驾驶辅助装置、驾驶辅助方法、及存储有程序的存储介质
文献发布时间:2023-06-19 18:32:25
技术领域
本发明涉及一种驾驶辅助装置、驾驶辅助方法、及存储有程序的存储介质。
背景技术
目前已知一种向驾驶员提供消息的车辆驾驶员消息系统(例如,参照专利文献1)。在车辆驾驶员消息系统中,例如,在方向盘上设置显示部,并在显示部上显示例如指示驾驶员应该转舵或驾驶车辆的方向的图标、转向不足或转向过度的警告消息等。
[先行技术文献]
(专利文献)
专利文献1:日本特表2011-525164号公报
发明内容
[发明所要解决的问题]
在上述的现有技术中,难以区分是发生了转向不足还是发生了转向过度,向驾驶员也就是用户传达车辆的行动的方法尚有改善的余地。
本发明的目的在于提供一种以易于理解的方式对用户传达车辆行动状态的驾驶辅助装置、驾驶辅助方法、及存储有程序的存储介质。
[解决问题的技术手段]
为了实现上述目的,本发明提供一种驾驶辅助装置(例如,后述的驾驶辅助装置1),具备:车辆信息获取部(例如,后述的车辆信息获取部12),获取与车辆的状态有关的信息;计算部(例如,后述的计算部7),基于前述车辆信息获取部的获取结果,计算与转向特性的状态有关的指标;及,显示部(例如,后述的显示部10),基于与前述转向特性的状态有关的指标,显示指示器,该指示器指示为转向不足和转向过度的任一状态;前述指示器具有:转向不足状态量显示部(例如,后述的转向不足状态量显示部U、U1、U2、···、U7),表示前述计算部计算出的转向不足的状态量;转向过度状态量显示部(例如,后述的转向过度状态量显示部O、O1、O2、···、O6),表示前述计算部计算出的转向过度的状态量;及,标准部(例如,后述的标准线N),夹持设置在前述转向不足状态量显示部和前述转向过度状态量显示部之间,并且根据前述转向不足的状态量和前述转向过度的状态量的增加,点亮远离前述标准部的位置的显示灯(例如,后述的部分U1、U2、···、U7、O1、O2、···、O6)。由此,能够容易地通过视觉识别出正在发生转向不足还是转向过度的哪种状态。
该情况下,优选的是,在前述转向不足状态量显示部和前述转向过度状态量显示部上设置有计量标。由此,车辆的驾驶员也就是用户能够容易地通过视觉识别出是转向不足状态还是转向过度状态的哪种状态,以及状态量。
该情况下,优选的是,前述转向不足状态量显示部的计量标的最大值被设置为大于前述转向过度状态量显示部的计量标的最大值。由此,能够提高可视性改善指示器中的转向不足状态量显示部的可视性改善。
该情况下,优选的是,在转向过度的状态量或转向不足的状态量超过预定值时,进行高亮显示。由此,由于正常的转向过度的状态是一种危险的状态,因此,可以通过使转向不足侧看起来有余量来提高安全性。
该情况下,优选的是,还具备检测车速的检测部,根据车速来改变前述预定值。在车辆中,如果在转向不足的状态下,车速越高,转弯轨迹越向外膨出。如果在转向过度的状态下,车速越高,转弯轨迹越向内,越容易打滑。在本实施方式中,由于根据车速改变例如点亮红色、蓝色、绿色、橙色灯的数量作为预定值,因此,车速越高,即使转向过度的状态量或转向不足的状态量为很小的值,也可以显示很高的危险等级。
该情况下,优选的是,还具备获取路面状态的路面状态获取部,根据路面状态改变前述预定值。如果路面因雨雪等变湿,或者气温降低而结冰,路面的摩擦系数降低,即使在因低车速产生的低横向加速度的情况下,轨迹也会容易膨出或打滑。在本实施方式中,藉由根据路面状态改变点亮红色、蓝色、绿色、橙色灯的数量作为预定值,能够显示高危险等级。此外,对于路面状态,除了藉由本实施方式的构成获取之外,可以使用由车载传感器等估计路面与轮胎之间的摩擦的技术,也可以根据气温或天气预报等信息进行更改,也可以使用例如雨刮器信息等其他的人工输入获取。
该情况下,优选的是,还具备获取前后方向加速度的前后方向加速度获取部,前述显示部显示与前述指示器共同获取的加速度(例如,后述的点42)。在减速时,车辆中前部载荷增强,加速度的方向往转向过度侧移动,在加速时,车辆中后部载荷增强,加速度的方向往转向不足侧移动,因此,可以同时看到这些关系。其结果,能够提高安全性。
该情况下,优选的是,还具备加速踏板开度获取部和刹车踏板开度获取部,所述加速踏板开度获取部获取加速踏板的开度,所述刹车踏板开度获取部获取刹车踏板的开度,前述显示部与前述指示器共同显示获取的前述加速踏板的开度(例如,后述的加速踏板的开度AI)和前述刹车踏板的开度(例如,后述的刹车踏板的开度BI)。由此,在减速时,车辆中前部载荷增强,加速度的方向往转向过度侧移动,在加速时,车辆中后部载荷增强,加速度的方向往转向不足侧移动,因此,可以一起看到这些关系。其结果,能够提高安全性。
该情况下,优选的是,前述计算部基于前述车辆信息获取部的获取结果,计算针对各车轮的摩擦圆(例如,后述的摩擦圆21),前述显示部与前述指示器共同显示计算出的前述针对各车轮的摩擦圆。由此,可以确认在转向不足的状态和转向过度的状态时载荷和负载系数如何变化。
该情况下,优选的是,前述车辆信息获取部还具备获取横向加速度的横向加速度获取部,前述显示部显示与前述指示器共同获取的前述横向加速度(例如,后述的点42)。由此,如果横向加速度高,自然会高度转向不足,因此,可以看到其平衡。
该情况下,优选的是,与前述转向特性的状态有关的指标为前后轮滑移角差、稳定性系数、中性转向点、及静态裕度值中的至少任意一种。由此,可以根据情况适当地选择与转向特性有关的合适的指标。
另外,本发明提供一种驾驶辅助方法,包括驾驶辅助装置的计算机根据转向不足的状态量和转向过度的状态量的增加,点亮远离标准部的位置的显示灯(例如,后述的部分U1、U2、···、U7、O1、O2、···、O6)的步骤,驾驶辅助装置具备:车辆信息获取部(例如,后述的车辆信息获取部12),获取与车辆的状态有关的信息;计算部(例如,后述的计算部7),基于前述车辆信息获取部的获取结果,计算与转向特性的状态有关的指标;及,显示部(例如,后述的显示部10),基于与前述转向特性的状态有关的指标,显示指示器,该指示器指示为转向不足和转向过度的任一状态;前述指示器具有:转向不足状态量显示部(例如,后述的转向不足状态量显示部U、U1、U2、···、U7),表示前述计算部计算出的前述转向不足的状态量;转向过度状态量显示部(例如,后述的转向过度状态量显示部O、O1、O2、···、O6),表示前述计算部计算出的前述转向过度的状态量;及,前述标准部,夹持设置在前述转向不足状态量显示部和前述转向过度状态量显示部之间(例如,后述的标准线N)。
另外,本发明提供一种存储有用于使驾驶辅助装置的计算机执行以下步骤的程序的存储介质,所述步骤即根据转向不足的状态量和转向过度的状态量的增加,点亮远离标准部的位置的显示灯(例如,后述的部分U1、U2、···、U7、O1、O2、···、O6),驾驶辅助装置具备:车辆信息获取部(例如,后述的车辆信息获取部12),获取与车辆的状态有关的信息;计算部(例如,后述的计算部7),基于前述车辆信息获取部的获取结果,计算与转向特性的状态有关的指标;及,显示部(例如,后述的显示部10),基于与前述转向特性的状态有关的指标,显示指示器,该指示器指示为转向不足和转向过度的任一状态,前述指示器具有:转向不足状态量显示部(例如,后述的转向不足状态量显示部U、U1、U2、···、U7),表示前述计算部计算出的前述转向不足的状态量;转向过度状态量显示部(例如,后述的转向过度状态量显示部O、O1、O2、···、O6),表示前述计算部计算出的前述转向过度的状态量;及,前述标准部(例如,后述的标准线N),夹持设置在前述转向不足状态量显示部和前述转向过度状态量显示部之间。
[发明效果]
根据本发明,可以提供一种以易于理解的方式对用户传达车辆行动状态的驾驶辅助装置。
附图说明
图1绘示出作为本发明的一实施方式的驾驶辅助装置的方块图。
图2绘示出作为本发明的一实施方式的显示在驾驶辅助装置的显示部上的转向不足和转向过度的指示器的图。
图3绘示出作为本发明的一实施方式的显示在驾驶辅助装置的显示部上的指示器中转向不足为最大时的状态的图。
图4绘示出作为本发明的一实施方式的显示在驾驶辅助装置的显示部上的指示器中转向过度为最大时的状态的图。
图5绘示出作为本发明的一实施方式的显示在驾驶辅助装置的显示部上的指示器中转向不足为标准值时的状态的图。
图6绘示出作为本发明的一实施方式的显示在驾驶辅助装置的显示部上的指示器中转向不足的危险区域较宽的显示状态的图。
图7绘示出作为本发明的一实施方式的显示在驾驶辅助装置的显示部上的指示器中均等地显示转向不足区域和转向过度区域的状态的图。
图8绘示出作为本发明的一实施方式的显示在驾驶辅助装置的显示部上的指示器中较宽地显示转向过度的区域的状态的图。
图9绘示出作为本发明的一实施方式的显示在驾驶辅助装置的显示部上的指示器中省略了计量标的显示状态的图。
图10绘示出作为本发明的一实施方式的显示在驾驶辅助装置的显示部上的指示器中用单色显示转向不足区域的状态的图。
图11绘示出作为本发明的一实施方式的显示出显示在驾驶辅助装置的显示部上的指示器和各轮胎的摩擦圆的状态的图。
图12用点绘示出作为本发明的一实施方式的显示在驾驶辅助装置的显示部上的前后方向加速度和横向加速度的图。
图13绘示出作为本发明的一实施方式的显示在驾驶辅助装置的显示部上的加速踏板的开度、刹车踏板的开度的指示器的图。
图14绘示出作为本发明的一实施方式的驾驶辅助装置的控制部进行的控制的流程图。
具体实施方式
以下,参照附图对本发明的实施方式详细地进行说明。图1是驾驶辅助装置1的方块图。图2绘示出显示在驾驶辅助装置1的显示部10上的转向不足和转向过度的指示器的图。图3绘示出显示在驾驶辅助装置1的显示部10上的指示器中转向不足为最大时的状态的图。图4绘示出显示在驾驶辅助装置1的显示部10上的指示器中转向过度为最大时的状态的图。图5绘示出显示在驾驶辅助装置1的显示部10上的指示器中转向不足为标准值时的状态的图。
图6绘示出显示在驾驶辅助装置1的显示部10上的指示器中转向不足的危险区域较宽的显示状态的图。
如图1所示,驾驶辅助装置1具备:控制部5、显示部10、及车辆信息获取部12。
车辆信息获取部12具备:车辆加速度检测部121,包括前后方向加速度获取部1211和横向加速度获取部1212;舵角检测部122;车速检测部123;路面状态获取部124;加速踏板开度获取部125;及,刹车踏板开度获取部126。
前后方向加速度获取部1211具有前后方向加速度传感器,检测并获取车辆的前后方向加速度。横向加速度获取部1212具有横向加速度传感器,检测并获取车辆的横向加速度。舵角检测部122具有舵角检测传感器,检测转向的转舵角。车速检测部123具有车速传感器,检测并获取车辆的车速。
路面状态获取部124具有用于探测路面的温度、湿度等的相机等,检测并获取路面状态。加速踏板开度获取部125具有用于检测加速踏板的开度的加速器开度传感器,获取加速踏板的开度。刹车踏板开度获取部126具有用于检测刹车的踏入量的刹车踏入量传感器,获取刹车踏板的开度。
控制部5具有计算部7、比较运算部8、及摩擦圆改变部9。具体而言,控制部5由中央处理器(Central Processing Unit,CPU)、随机存取存储器(Random Access Memory,RAM)及只读存储器(Read-Only Memory,ROM)构成,并执行各种控制。CPU是所谓的中央运算处理装置,执行各种程序以实现各种功能。RAM用作CPU的工作区域、存储区域,ROM是存储CPU上执行的操作系统、程序的存储介质。代替CPU,可以使用不能改写程序的有线逻辑作为微处理单元(Micro-Processing Unit,MPU)或控制部5。如果使用有线逻辑作为控制部5,则对于提高处理速度有效。作为有线逻辑,具有例如专用集成电路(Application SpecificIntegrated Circuit,ASIC)等。另外,控制部5可以由一个半导体元件构成,也可以由多个半导体元件构成。在控制部5由多个半导体元件构成的情况下,可以由彼此不同的半导体元件实现专利要求范围中所述的各控制。进而,控制部5也可以由包括半导体元件和电阻或电容器等无源部件的配置而构成。
计算部7基于车辆的转向特性,具体地基于车身的转弯状态下的前后轮滑移角差,计算出是伴随车身的速度增加而转弯半径增大的转向不足(US)状态、是伴随速度增加而转弯半径减小的转向过度(OS)状态、还是即使速度变化但转弯半径不变的中性转向状态。另外,计算部7基于车辆加速度检测部121的检测结果,计算针对各车轮的摩擦圆、以及轮胎(车轮)产生的横向力和轮胎产生的前后力。
此处,摩擦圆相当于基于路面的摩擦系数和各轮胎产生的力而计算出的轮胎力的极限值。具体而言,例如,路面与轮胎之间的摩擦力的大小体现为摩擦圆的半径。在本说明书中,摩擦圆显示为大致圆板形。作为摩擦圆,可以是正圆也可以是椭圆,也可以组合显示不同轴长的椭圆。
比较运算部8比较在转向特性为转向不足(US)状态或转向过度(OS)状态时,转向不足状态、转向过度状态是否超过预定的状态,即比较转向不足状态量、转向过度状态量是否超过预定值,更具体而言,比较前后轮滑移角差是否超过预定值。摩擦圆改变部9改变摩擦圆的大小。
显示部10基于计算部7的计算结果,显示转向特性的指示器和基于摩擦圆的图像。显示部10可以由液晶面板构成,也可以由有机EL面板构成。另外,显示部10可以设置在车载仪表或DA(智能屏互联系统),也可以是乘坐车辆的驾驶员或同乘人员的智能手机或PC(个人计算机)等信息终端的屏幕。届时,控制部5与信息终端可以以无线方式进行信息的发送和接收。
[转向特性的计算方法]
指示器上显示的转向不足、转向过度等转向特性可以使用例如被称为前后轮滑移角差、稳定性系数、中性转向点、及静态裕度的数值,在本实施方式中,例如使用前后轮滑移角差。
具体而言,在车辆的转弯状态下,如果前轮的滑移角(侧滑)大于后轮的滑移角,则看做转向不足,如果后轮的滑移角(侧滑)大于前轮的滑移角,则看做转向过度。此处,例如将方向盘角设为δf,将方向盘角和前轮的转舵角的比设为Ns,将轴距设为l(l),将车辆的行进方向的速度设为V,将围绕车辆的重心的偏航角速度设为r,将车辆重心点的横向加速度设为a
[式1]
其中,在本实施方式中,车辆速度、偏航角速度、横向加速度由配备在车辆上的具有传感器的车辆信息获取部12获取,但并不限定于此。例如,也可以使用智能手机或外部GPS等外部信息获取并运算。另外,也可以不利用上述式求出前后轮滑移角差,而是例如将GPS天线安装在车辆的前部和后部,并根据其中测量的横向速度的前后差等来计算。
另外,也可以预先存储轮胎特性等数据,时刻计算前后轮的侧偏刚度(轮胎横向力增加相对于轮胎滑移角增加的比),并计算稳定性系数和中性转向点。将前后轮的侧偏刚度设为K
[式2]
用上式表现的表示转向不足、转向过度的稳定性系数是一个例子,但转向不足、转向过度的方向可以藉由上式的“l
[转向特性的显示]
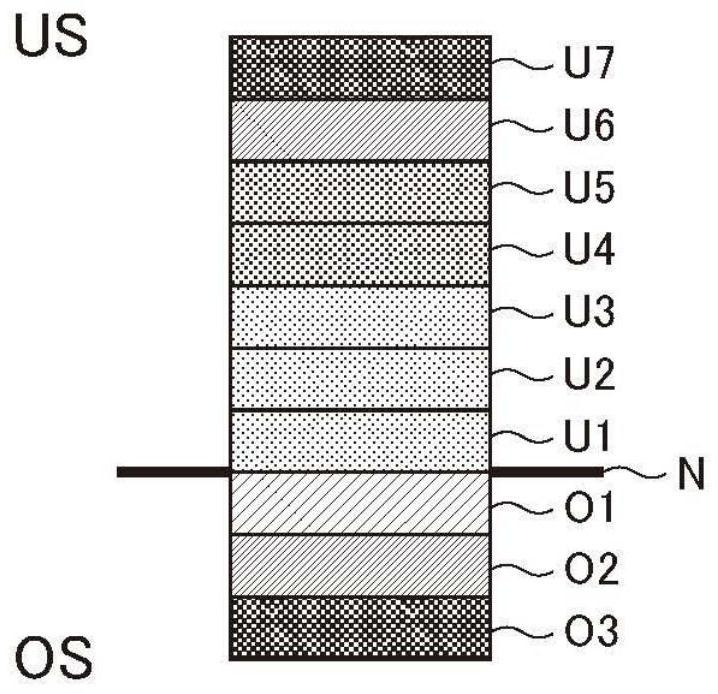
使用驾驶辅助方法进行的转向特性的显示藉由由条形图构成的指示器来显示。如图2所示,指示器在表示中性转向的标准线N的上侧显示表示转向不足的强度的计量标。计量标构成为:将条形图在标准线N上侧七等分显示,并根据转向不足状态量的增加,即转向不足的强度的增加,位于标准线N上侧的位置的被七等分的各个部分中点亮的部分(显示灯)增加。
更具体而言,在计量标的标准线N上侧的被七等分的各个部分U1~U7中,从标准线N的紧靠上侧朝向上方向下面的三个部分U1~U3表示转向不足较弱且没有问题。其中最下侧的部分U1表示转向不足最弱,随着朝向上侧点亮的部分个数的增加,转向不足增强。在该三个部分U1~U3点亮时,构成为以相同的颜色例如蓝色灯点亮。
其上边的两个部分U4~U5是指稍微形成转向不足状态,但仍是标准水平的转向不足状态。两个均点亮的情况表示转向不足比一个点亮的情况强。在该两个部分点亮时,构成为以相同的颜色例如绿色灯点亮。
进而,其上边的一个部分U6是指由于转向不足增强,需要采取降低速度等对策。在该部分点亮时,转向不足状态量大于安全状态下的预定量(部分U5点亮的转向不足状态量),转向不足较强,因此,构成为以例如橙色灯点亮并高亮显示。
进而,作为其上边的一个部分即最远离标准线N的部分U7表示转向不足增强为危险的状态,有偏离车道的危险,必须采取降低速度等对策。在该部分点亮时,如前所述,转向不足状态量远大于安全状态下的预定量(部分U5点亮的转向不足状态量),转向不足极强,因此,构成为以例如红色灯点亮并高亮显示。
另外,指示器的计量标在标准线N下侧将条形图三等分进行显示,构成为:根据转向过度状态量的增加,即转向过度的强度的增加,位于标准线N下侧的位置的被三等分的各个部分O1~O3中点亮的部分(显示灯)增加。显示转向不足状态量的计量标的最大值(部分U7)被设置为大于显示转向过度状态量的计量标的最大值(部分O3)。
更具体而言,在计量标的标准线N下侧的被三等分的各个部分中,从标准线N的紧靠下侧朝向下方向,最上边的一个部分O1表示形成转向过度状态且车辆有不稳定的趋势。在该部分点亮时,转向过度状态量大于安全状态下的标准线N的位置的状态量的值,因此,构成为以例如黄色灯点亮并高亮显示。
其下边的一个部分O2表示由于转向过度增强,需要采取降低速度等对策。在该部分点亮时,转向过度状态量更加大于安全状态下的标准线N的位置的状态量的值,因此,构成为以例如橙色灯点亮并高亮显示。
进而,作为其下边的一个部分即最远离标准线N的部分O3表示转向过度增强为容易打滑的状态,或开始打滑的状态。在该部分点亮时,转向过度状态量远大于安全状态下的标准线N的位置的状态量的值,因此,构成为以例如红色灯点亮并高亮显示。
如图3所示,在转向不足为最强状态时,构成为标准线N上侧的计量标的所有的部分U1~U7点亮。另外,如图4所示,在转向过度为最强状态时,构成为标准线N下侧的计量标的所有的部分O1~O3点亮。另外,例如,作为在稍微形成转向不足状态的状态时的一个例子,如图5所示,构成为向上侧延伸点亮至标准线N上侧的计量标的中间位置的部分U5。
另外,在显示部10由智能手机的屏幕构成的情况下,藉由点击或滑动显示部10的指示器的部分,另外,在显示部10设置在车载仪表或DA(智能屏互联系统)上的情况下,藉由点击或滑动车载触控板等,如后述的图7~图13所示,构成为可以切换指示器的显示。
图7绘示出显示在驾驶辅助装置1的显示部10上的指示器中均等显示转向不足的区域和转向过度的区域的状态的图。图8绘示出显示在驾驶辅助装置1的显示部10上的指示器中较宽地显示转向过度的区域的状态的图。图9绘示出显示在驾驶辅助装置1的显示部10上的指示器中省略了计量标的显示的状态的图。图10绘示出显示在驾驶辅助装置1的显示部10上的指示器中用单色显示转向不足的区域的状态的图。图11绘示出显示在驾驶辅助装置1的显示部10上的指示器和各轮胎的摩擦圆的状态的图。图12用点绘示显示在驾驶辅助装置1的显示部10上的前后方向加速度和横向加速度的图。图13绘示出显示在驾驶辅助装置1的显示部10上的加速踏板的开度、刹车踏板的开度的指示器的图。
另外,构成为:在由车速检测部123探测到的车速的值高于预定值的情况下,或者在由路面状态获取部124获得的路面的状态为容易打滑的路面状态(比预定的阈值容易打滑的路面状态的值)等情况下,由控制部5以自动切换显示的方式控制如后述的图6所示的指示器的显示。
具体而言,例如,如图6所示,可以将以相同的颜色点亮的个数切换成与前述的显示个数不同的显示。即构成为对标准线N上侧的计量标中的部分U1~U2点亮蓝色灯,对其上边的部分U3点亮绿色灯,对其上边的部分U4点亮橙色灯,对其上边的部分U5~U7点亮红色灯。
另外,例如,如图7所示,可以将标准线N上侧的计量标的部分U1~U5和下侧的计量标的部分O1~O5的显示切换为形成相同数量。另外,例如,如图8所示,可以将标准线N上侧的计量标的部分U1~U4的数量的显示切换为少于下侧的计量标的部分O1~O6的数量。另外,例如,如图9所示,指示器的内侧没有被计量标分成多个部分,而是可以随着远离标准线N,切换为点亮的部分的颜色发生变化的显示。另外,例如,如图10所示,指示器的内侧没有被分成多个部分,而是可以切换成以相同的颜色点亮的显示。
另外,藉由切换显示,例如,如图11所示,可以与作为转向特性的显示的指示器SI共同显示针对车辆的各车轮的摩擦圆。
其中,摩擦圆相当于基于路面的摩擦系数和各轮胎产生的力计算出的轮胎力的极限值。具体而言,例如,路面与轮胎之间的摩擦力的大小表现为摩擦圆的半径,在本实施方式中,摩擦圆以大致圆板状显示在显示部10上。作为显示在显示部10上的摩擦圆,可以是正圆也可以是椭圆,也可以组合显示轴长不同的椭圆。
[摩擦圆的计算方法]
以下,对摩擦圆的计算方法的一个例子进行说明。摩擦圆的计算方法是一个例子,也可以使用其他各种计算方法。
首先,考虑将垂直方向设为Z轴,将车辆的前后方向设为X轴,即将与X轴和Z轴垂直的车轴方向设为Y轴的坐标。在各轮胎的摩擦圆的计算中需要路面的摩擦系数μ和各轮胎产生的力Fz。在车辆处于静止状态时,各轮胎产生的力Fz仅由施加到车辆的重力和车辆的载荷平衡决定。即,显示为摩擦圆的圆板的大小由摩擦系数μ和Fz的乘积决定。
根据车辆的特性和加速度估计各轮胎产生的力Fz。例如如果将轴距长设为L,胎面宽度设为d,重心高设为h,质量设为M,重力加速度设为g,由车辆加速度检测部121测量到的X轴方向的加速度设为ax,Y轴方向的加速度设为ay,左右的载荷移动的前后平衡设为R,各轮胎产生的力Fz是藉由静平衡计算来计算的,例如式(3)所示。在此,为了简化计算,假设重心位于距前后轮等距离的位置。
[式3]
此外,不考虑簧下惯性力。
[摩擦圆的显示]
如图11所示,摩擦圆在显示部10中显示为显示图像11。具体而言,显示图像11包括显示关于FL(左前轮)的轮胎的信息的轮胎摩擦显示图像15A、显示关于FR(右前轮)的轮胎的信息的轮胎摩擦显示图像15B、显示关于RL(左后轮)的轮胎的信息的轮胎摩擦显示图像15C、及显示关于RR(右后轮)的轮胎的信息的轮胎摩擦显示图像15D。
轮胎摩擦显示图像15A~15D分别显示1G显示圆21,即在车辆停止时轮胎产生的力对应的摩擦圆,以及最大摩擦圆24,即假设轮胎具有极大的抓地能力时的摩擦圆。最大摩擦圆24的大小针对前轮例如可以为9kN,针对后轮可以对应为6kN。
此外,摩擦系数μ虽路面状况发生显著变化,具体而言是在下雨或下雪或路面结冰时,另外,由于轮胎的磨损量也可以产生较大变化,因此,在计算摩擦圆22的大小时,摩擦系数μ可以在计算中相应地改变。具体而言,藉由改变摩擦圆22的大小的控制部5的摩擦圆改变部9在显示部10上显示改变摩擦圆22的大小的设置屏幕,并且用户可以改变摩擦圆22的大小。
另外,驾驶辅助装置可以获取由路面状态获取部124获取的路面状況和轮胎的磨损量,并且摩擦圆改变部9可以改变摩擦圆22的大小。另外,测量并获取路面的温度和湿度,或者根据更换轮胎的行驶距离等估计摩擦系数μ,基于这些可以计算、改变并显示摩擦圆22的大小。
另外,在图11的中央示出了车辆的图示VI,但藉由切换显示,可以进行其他显示来代替车辆的图示VI。例如,如图12所示,可以切换成显示车辆重心位置上的加速度的大小和朝向的重心显示。重心显示例如显示表示车辆的重心的位置上的加速度的方向和大小的点42以及表示其经时变化的轨迹44。点42距图12所示的圆的中心的距离表示加速度的大小,点42相对于图12所示的圆的中心的方向表示加速度的方向。
另外,藉由切换显示部10上的显示,可以与转向特性的指示器共同显示图13所示的表示加速踏板开度的指示器AI,或表示刹车踏板开度的指示器BI。在指示器AI、指示器BI中,构成为以表示加速踏板开度、刹车踏板开度的显示灯从左端朝向右端尺寸逐渐增大的方式设置,当前的加速踏板开度、刹车踏板开度藉由正在点亮的显示灯IL显示。在表示加速踏板开度的指示器AI中,如图13所示,发动机运行区域R1包括表示最大的加速踏板开度的显示等在内从右端设置四个。由此,可以藉由在发动机运行区域R1中显示灯IL点亮产生的加速踏板的开度来确认发动机运行。
[转向特性显示的控制]
接着,对控制部5的控制进行说明,该控制是由驾驶辅助装置的计算机中执行的程序进行转向特性的指示器的显示的控制。图14绘示出由驾驶辅助装置1的控制部5进行的控制的流程图。
首先,在步骤S101中,控制部5控制车辆信息获取部12获取前后轮滑移角差等计算时所需的车辆的行进方向的速度V、绕车辆的重心点的偏航角速度r、车辆重心点的横向加速度ay等。然后,由控制部5进行的控制的处理进入步骤S102。
首先,在步骤S102中,控制部5基于前述式(1)计算前后轮滑移角差,基于前述式(2)计算稳定性系数。然后,由控制部5进行的控制的处理进入步骤S103。
首先,在步骤S103中,控制部5基于输出的前后轮滑移角差的值,对显示部10进行控制,以显示显示转向特性的指示器。然后,由控制部5进行的控制的处理返回步骤S101。
[效果]
根据本实施方式,起到如下的效果。
在本实施方式中,显示部10的指示器具有:转向不足状态量显示部,表示计算部7计算出的转向不足的状态量;转向过度状态量显示部,表示计算部7计算出的转向过度的状态量;及,标准线N,夹持设置在转向不足状态量显示部和转向过度状态量显示部之间,根据转向不足状态量和转向过度的状态量的增加,点亮远离标准线N的位置的显示灯。由此,能够容易地通过视觉识别出正在发生转向不足还是转向过度的哪种状态。
另外,在本实施方式中,在转向不足状态量显示部(部分U、U1、U2、···、U7)和转向过度状态量显示部(部分O、O1、O2、···、U6)上设置有计量标。由此,作为车辆的驾驶员的用户能够容易地通过视觉识别出是转向不足状态还是转向过度状态的哪种状态,以及状态量。
另外,在本实施方式中,转向不足状态量显示部的计量标的最大值被设置为大于转向过度状态量显示部的计量标的最大值。由此,能够提高可视性改善指示器中的转向不足状态量显示部的可视性改善。
另外,在本实施方式中,在转向过度的状态量或转向不足的状态量超过预定值时进行高亮显示。由此,由于正常的转向过度的状态是一种危险的状态,因此,可以通过使转向不足侧看起来有余量来提高安全性。
另外,在本实施方式中,还具备检测车速的检测部,根据车速改变红色、蓝色、绿色、橙色灯点亮的数量作为预定值量。在车辆中,如果在转向不足的状态下,车速越高,转弯轨迹越向外膨出。如果在转向过度的状态下,车速越高,转弯轨迹越向内,越容易打滑。在本实施方式中,由于根据车速改变例如点亮红色、蓝色、绿色、橙色灯的数量作为预定值,因此,车速越高,即使转向过度的状态量或转向不足的状态量为很小的值,也可以显示很高的危险等级。
另外,在本实施方式中,还具备获取路面状态的路面状态获取部,根据路面状态改变红色、蓝色、绿色、橙色灯的点亮个数作为预定值。如果路面因雨雪等变湿,或者气温降低而结冰,路面的摩擦系数降低,即使在因低车速产生的低横向加速度的情况下,轨迹也会容易膨出或打滑。在本实施方式中,藉由根据路面状态改变红色、蓝色、绿色、橙色灯点亮的数量作为预定值量,能够显示高危险等级。此外,对于路面状态,除了藉由本实施方式的构成获取之外,也可以使用由车载传感器等估计路面·轮胎之间的摩擦的技术,也可以根据气温或天气预报等信息进行更改,,也可以使用例如雨刮器信息等其他的人工输入获取。
另外,在本实施方式中,还具备获取前后方向加速度的前后方向加速度获取部1211,显示部10显示与指示器共同获取的加速度。由此,在减速时,车辆中前部载荷增强,加速度的方向往转向过度侧移动,在加速时,车辆中后部载荷增强,加速度的方向往转向不足侧移动,因此,可以同时看到这些关系。其结果,能够提高安全性。
另外,在本实施方式中,还具备加速踏板开度获取部和刹车踏板开度获取部,所述加速踏板开度获取部获取加速踏板的开度,所述刹车踏板开度获取部获取刹车踏板的开度,显示部10与指示器共同显示获取的前述加速踏板的开度和前述刹车踏板的开度。由此,在减速时,车辆中前部载荷增强,加速度的方向往转向过度侧移动,在加速时,车辆中后部载荷增强,加速度的方向往转向不足侧移动,可以一起看到这些关系。其结果,能够提高安全性。
另外,在本实施方式中,计算部7基于车辆信息获取部12的获取结果计算针对各车轮的摩擦圆,显示部10与指示器共同显示计算出的前述针对各车轮的摩擦圆。由此,可以确认在转向不足的状态和转向过度的状态时载荷和负载系数如何变化。
另外,在本实施方式中,车辆信息获取部12还具备获取横向加速度的横向加速度获取部1212,显示部10将与指示器共同获取的前述横向加速度显示在如图12所示的圆中。由此,如果横向加速度高,自然会高度转向不足,因此,可以看到其平衡。
另外,在本实施方式中,与转向特性的状态有关的指标是前后轮滑移角差、稳定性系数、中性转向点、及静态裕度值中的至少任意一种。由此,可以根据情况适当地选择与转向特性有关的合适的指标。
本发明不限定于上述实施方式,在可以实现本发明的目的的范围内的变形、改良等包含在本发明中。
例如,车辆信息获取部、计算部、显示部、转向不足状态量显示部、转向过度状态量显示部、标准部等的构成不限定于车辆信息获取部12、计算部7、显示部10、转向不足状态量显示部U、转向过度状态量显示部O、标准部N等的构成。
另外,在本实施方式中,使用驾驶辅助方法进行的转向特性的显示可以藉由由条形图构成的指示器来显示,如图2等所示,在表示中性转向的标准线N的上侧显示表示转向不足的强度的计量标,在标准线N的下侧显示表示转向过度的强度的计量标,但并不限定于此。例如也可以在标准线N的下侧显示表示转向不足的强度的计量标,在标准线N的上侧显示表示转向过度的强度的计量标来代替上者。
附图标记
1…驾驶辅助装置
7…计算部
10…显示部
12…车辆信息获取部
21…摩擦圆
42…点
AI…加速踏板的开度
BI…刹车踏板的开度
N…标准线(标准部)
O、O1、O2、···、O6部分…(转向过度状态量显示部)
U、U1、U2、···、U7部分…(转向不足状态量显示部、显示灯)
- 导航方法、装置、存储介质及高级驾驶辅助系统
- 一种辅助驾驶的方法、装置、设备和计算机存储介质
- 一种基于神经网络的辅助驾驶方法、装置及可读存储介质
- 驾驶辅助设备和存储介质
- 基于无人驾驶的驾驶辅助方法、装置、设备、介质和车辆
- 驾驶辅助装置、驾驶辅助系统、驾驶辅助方法以及存储有驾驶辅助程序的记录介质
- 驾驶员辅助装置、存储有驾驶员辅助程序的非暂时性存储介质和驾驶员辅助系统