一种叠层翻板对接装置
文献发布时间:2023-06-19 13:45:04
技术领域
本申请涉及一种叠层翻板对接装置,特别是用于冻干机自动进出料的对接装置,属于机电一体化技术领域。
背景技术
真空冷冻干燥机就是利用冷冻干燥原理(即将含水物质进行降温冻结成固态,然后在真空的条件下使水蒸汽直接从固态中升华出来)设计制造出来的用于冻干含水物质的机器。
灌装机是药厂进行分装药水的设备,通过该设备把药水分装到每个小的西林瓶,然后再经过传输系统进入到真空冷冻干燥机的板层上进行冻干工艺处理。
近几年来,伴随着国内外冻干制剂的快速发展,许多制药厂家对大型高速灌装机和大装量的冻干机需求也在不断增加,而此类冻干制剂生产线大部分都配置自动进出料系统,自动进出料系统是把来自灌装机半压塞的西林瓶按照先后顺序交错排列方式自动的输送至冻干机板层上面,冻干机有自动升降小门,小门前需要通过对接装置与板层对接,对接装置在小门打开的时候能与板层自动对接,在小门关闭的时候应当从冻干机里面撤出。
目前市面上常见的对接装置有两种:一种是采用大翻板+直线导轨的方式,将直线导轨直线运行转为翻板的旋转运行,实现大翻板伸入冻干机与板层对接。一方面此结构简单,动作单一,不够灵活,导致冻干机的小门开口较大,这样在进料过程中增加冻干机内部环境的控制难度;另一方面直线导轨长度过大,伸出隔离器,导致冻干机小门前需要留出较大空间放置机械导轨,大大增加了无菌室空间,既浪费药厂空间,同时增加药品的生产能耗。另一种是分段式对接,将翻板分成三段,固定段、翻转段和平移段,将前一种结构中的大翻板分成翻转段和平移段两部分,翻转段较小,无需直线导轨可直接翻转,可避免前一种结构的部分缺陷。但平移段安装在冻干机内部,为了实现对接和平移运动,需要在冻干机内部安装轨道,加上本身的运动轮等多种结构,一方面导致冻干机内部很难清洁;另一方面平移段受冻干温度变化,结构容易变形,导致对接不平稳,增加进料过程中的倒瓶风险,同时整体使用寿命较短,增加设备的使用成本。
发明内容
本申请要解决的技术问题是现有对接装置与冻干机内部板层难以对接的问题。
为了解决上述技术问题,本申请的技术方案是提供了一种叠层翻板对接装置,用于与冻干机板层的对接,其特征在于,包括翻转对接板和叠层延长板,所述翻转对接板通过翻转组件旋转切换竖起状态和水平状态;
翻转对接板处于竖起状态下,所述叠层延长板与翻转对接板平行叠层设置,叠层延长板处于叠层位置;
翻转对接板处于水平状态下,所述叠层延长板通过移动组件驱动移动至翻转对接板靠近冻干机板层的一侧,所述叠层延长板后端对接翻转对接板、前端对接冻干机板层从而延长翻转对接板的对接长度,叠层延长板处于对接位置。
优选的,所述翻转组件包括翻转伺服电机、转轴和转轴安装座,翻转伺服电机驱动连接转轴,转轴通过转轴安装座连接所述翻转对接板。
优选的,所述翻转伺服电机和转轴之间还设有翻转减速机。
优选的,所述翻转伺服电机通过安装立板固定在底座上。
优选的,所述移动组件包括设置在叠层延长板移动方向左右两侧的移动轨道,所述叠层延长板上设有移动轴,所述移动轴设于所述移动轨道内,所述移动轴连接推进电缸活动杆,推进电缸活动杆驱动移动轴于移动轨道内移动从而带动叠层延长板移动。
优选的,所述推进电缸活动杆由推进伺服电机驱动,推进伺服电机可以提供给更为精准的控制。
本申请优点在于:1、整套系统结构灵活、紧凑,无需过渡导轨和长推杆,占地面积小,极大的节省了无菌室空间。2、整套系统完全独立于冻干机之外,安装简单,调试方便,极大的节省了制造成本。3、翻板一分为二,相互重叠,所以翻转过程中尺寸较小,冻干机小门开口尺寸可以做得更小,进料时减少外部环境对冻干机内部的影响,更符合GMP要求。4、翻板退出冻干机后,工作台面后翻,容易清洁。5、进料换板层时,由于翻板不需要翻转运动可以继续理瓶,减少换板层对进料速度的影响,提高生产效率。
附图说明
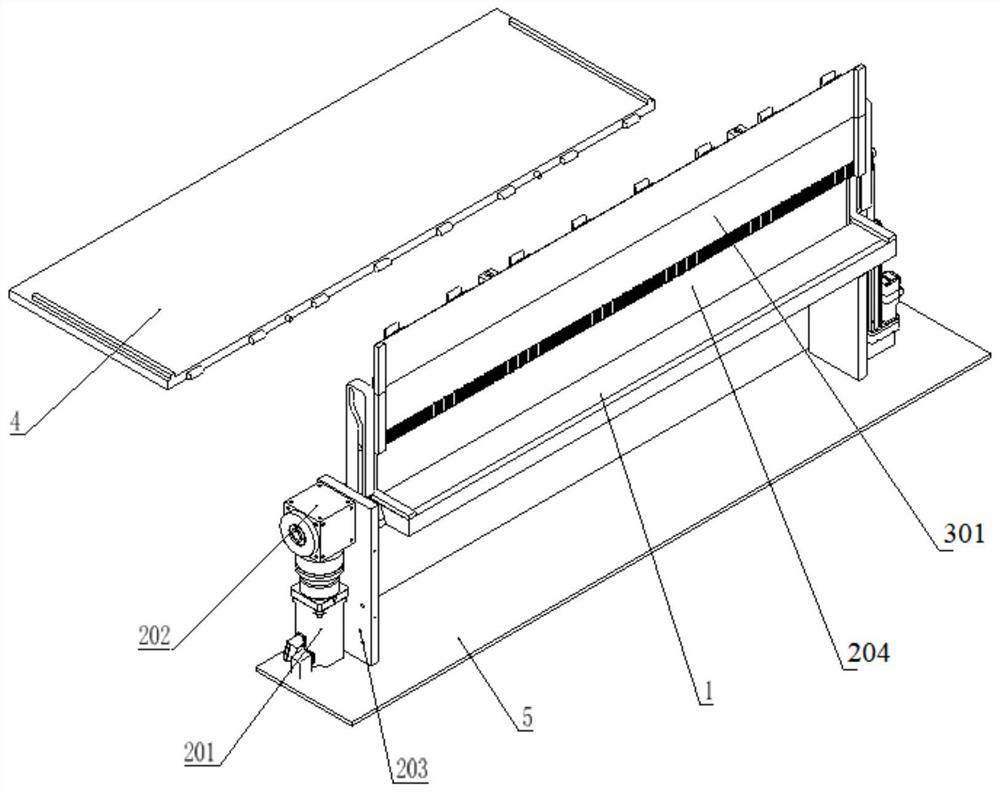
图1为实施例中提供的叠层翻板对接装置结构翻转对接板竖起状态示意图;
图2为叠层翻板对接装置结构翻转对接板水平状态示意图;
图3为叠层翻板对接装置结构俯视示意图;
图4为叠层延长板拼接过程示意图;
图5为叠层延长板拼接完成示意图;
附图标记:固定座1,翻转组件2,移动组件3,冻干机板层4,底座5,翻转伺服电机201,翻转减速机202,安装立板203,翻转对接板204,转轴安装座205,转轴206,叠层延长板301,移动轴302,移动轨道303,推进电缸活动杆304,推进伺服电机305,电缸安装座306。
具体实施方式
为使本申请更明显易懂,兹以优选实施例,并配合附图作详细说明如下。
实施例
本实施例提供的是叠层翻板对接装置,包括固定组件,翻转组件2,移动组件3,固定组件包括固定座1和底座5,翻转组件2包括翻转伺服电机201、翻转减速机202、安装立板203、转轴安装座205、转轴206,翻转组件2用于翻转翻转对接板204,移动组件3包括移动轴302、移动轨道303、推进电缸活动杆304、推进伺服电机305、电缸安装座306,移动组件3用于移动叠层延长板301;
结构如图1和图2所示,翻转对接板204用于与冻干机板层4的对接,图1所示为翻转对接板204的竖起状态,图2所示为翻转对接板204的水平状态,叠层延长板301用于延长翻转对接板204的对接长度;如图1所示,竖起状态下,叠层延长板301与翻转对接板204平行叠层设置,叠层延长板301处于叠层位置;
如图2所示,水平状态下,叠层延长板301通过移动组件3驱动移动至翻转对接板204靠近冻干机板层4的一侧,叠层延长板301后端对接翻转对接板204、前端对接冻干机板层4从而延长翻转对接板204的对接长度,叠层延长板301处于对接位置;翻转对接板204和叠层延长板301靠近冻干机板层4的一侧为前端、远离冻干机板层4的一侧为后端,其余两侧为左右两侧;
如图1、图3所示,翻转对接板204的翻转由翻转组件2驱动,安装立板203固定在固定座1上,翻转伺服电机201安装在安装立板203上,翻转伺服电机201通过翻转减速机202连接转轴206,翻转减速机202用于降速、可提高输出扭矩,避免冲击导致防止翻转伺服电机201损伤;转轴206通过转轴安装座205固定连接翻转对接板204;至此,翻转对接板204在转轴206的旋转带动下实现翻转,切换竖起状态和水平状态;
如图2所示,叠层延长板301的移动由移动组件3驱动,推进伺服电机305安装在底座5上,推进伺服电机305驱动连接推进电缸活动杆304、控制活动杆伸长收缩,推进电缸活动杆304的活动端连接固定在叠层延长板301上的移动轴302,移动轴302设置在叠层延长板301左右两侧的移动轨道303里,移动轨道303安装在翻转对接板204上,推进电缸活动杆304伸长、带动移动轴302沿移动轨道303向前端、向下移动,最终叠层延长板301可移动至翻转对接板204和冻干机板层4之间,翻转对接板204、叠层延长板301和冻干机板层4拼接为一整体。
本申请提供的固定组件,翻转组件和移动组件紧密配合:固定组件固定于进料输送带上,翻转组件固定于固定组件上,移动组件安装在翻转组件上;其中翻转组件包含翻转伺服电机组件一套,移动组件包含推进伺服电机组件一套;翻转伺服电机控制翻转对接板的翻转,安装在翻转组件上的移动组件跟随一同翻转;叠层延长板由伺服电动缸推动,沿着安装在翻转对接板上的移动轨道运行;整过对接装置在两套伺服电机的精确控制下翻转与平移,从而实现与板层的平稳对接;具体动作过程如下:
如图1所示,首先冻干机板层4运动到等高进料位置后停止,此时冻干机控制系统发出对接信号,之后翻转组件2的翻转伺服电机201启动,通过翻转减速机202带动转轴206作旋转运动,由于转轴206通过转轴安装座205与翻转对接板204固定在一起,翻转对接板204在转轴206的旋转带动下实现整体翻转,由竖起状态翻至水平状态。在翻转过程中,移动组件3与翻转组件2保存相对静止状态。当翻转对接板204翻至水平状态时,叠层延长板301也处于水平状态,但在竖起方面与翻转对接板204保持重叠,如图2所示。此时推进伺服电机305开始启动,控制安装在电缸安装座306上的推进电缸活动杆304向前伸出。安装在叠层延长板301上的移动轴302穿过移动轨道303与推进电缸活动杆304连接。在推进电缸活动杆304的推动下,移动轴302沿着移动轨道303向前运行,从而带动叠层延长板301向前和向下平移,到达如图4所示位置时,叠层延长板301下降到与翻转对接板204处于同一平面。推进电缸活动杆304继续前伸,推动叠层延长板301向前平移,到达如图5所示位置,实现与冻干机板层的平稳对接。
当一个板层进料结束后,在推进伺服电机305的驱动下,推进电缸活动杆304向后收缩,带动叠层延长板301向后平移,由图5所示对接位退回到图4所示位置,与冻干机板层4脱开,此时冻干机板层4可以自由升降。当另一板层到达等高进料位置停止后,推进电缸活动杆304再次推动叠层延长板301向前平移与冻干机板层对接。推进电缸活动杆304依次重复上述动作过程,直到所有板层进料完成后,推进电缸活动杆304持续向后收缩,带动叠层延长板301从图4所示位置沿移动轨道303向后、向上移动,直到与翻转对接板204在竖直方向上重叠,回到如图2所示位置。此时推进电缸活动杆304停止运动,叠层延长板301与翻转对接板204位置保持相对固定。在翻转伺服电机201的驱动下,翻转对接板204与叠层延长板301一起从水平方向翻转至竖直方面,从而与冻干机完全脱开,回到如图1所示的原始状态。