一种设有紧凑型步进机械结构的加热炉
文献发布时间:2023-06-19 13:45:04
技术领域
本发明属于冶金行业轧钢加热炉技术领域,具体提供一种设有紧凑型步进 机械结构的加热炉。
背景技术
目前,定制化、小型化、个性化的生产越来越普及,热加工行业坯料热送 热装工艺水平也在逐步提高。这就要求加热坯料的步进式加热炉在保证加热质 量的同时对于中低产量的小型加热炉需求进一步增加。中小型加热炉的成本尤 为重要。
目前,步进式加热炉的步进机械比较复杂,成本较高。对于中小型加热炉 不具备成本优势,复杂的结构存在浪费。
因此为了实现在保证稳定性、安全性和耐久性的前提下,达到降低设备成 本、简化设备结构,便于安装维护,简化土建施工,设备故障率低,降低维护 成本的目的,提出本发明。
发明内容
为了解决上述技术问题,本发明提供了一种设有紧凑型步进机械结构的加 热炉,进一步降低中小型步进式加热炉成本。
本发明是这样实现的,提供一种设有紧凑型步进机械结构的加热炉,包括 步进式加热炉本体和多个紧凑型步进机械结构,每个紧凑型步进机械结构包括 升降单元和平移单元,升降单元包括斜轨座、升降滚轮、升降轴和升降驱动设 备,平移单元包括平移滚轮、平移框架和平移驱动设备,升降滚轮和平移滚轮 均设有2个,2个升降滚轮分别转动连接在升降轴的两端,2个升降轮与斜轨座 匹配,升降驱动设备与升降轴连接;2个平移滚轮分别转动连接在2个升降滚轮 内侧的升降轴上,2个平移滚轮与平移框架的下表面匹配,平移驱动设备与平移 框架连接,平移框架上表面与步进式加热炉本体连接。
优选地,所述斜轨座包括数量均为2个的直角三角形形状的支撑板、斜轨 道和限位块,斜轨道固定在支撑板的斜边上,在支撑板的斜边最下端,固定设 置限位块。
进一步优选,所述支撑板位于下端的锐角的角度为11-30°。
进一步优选,所述升降驱动设备和所述平移驱动设备为液压驱动设备或气 压驱动设备或电动驱动设备。
进一步优选,多个紧凑型步进机械结构的所述平移框架为一体结构,步进 式加热炉本体的活动梁的下端固定连接在平移框架上。
优选地,还包括与所述紧凑型步进机械结构数量相同的平移轨道结构,平 移轨道结构设置在所述平移框架下表面,每个平移轨道结构与对应位置的所述 平移滚轮匹配。
进一步优选,每个所述紧凑型步进机械结构设置在混凝土固定基础上,混 凝土固定基础中部设凹槽,所述斜轨座下方设凸起,斜轨座的凸起与混凝土固 定基础的凹槽匹配,且斜轨座通过螺栓固定在混凝土固定基础上。
与现有技术相比,本发明的优点在于:
在保证满足加热炉运行要求、并且设备运行安全性和稳定性的基础上,将 步进机械进行紧凑化重新设计,实现达到降低设备成本、压缩设备结构空间, 便于安装维护,简化土建施工,设备故障率低,降低维护成本的目的。
附图说明
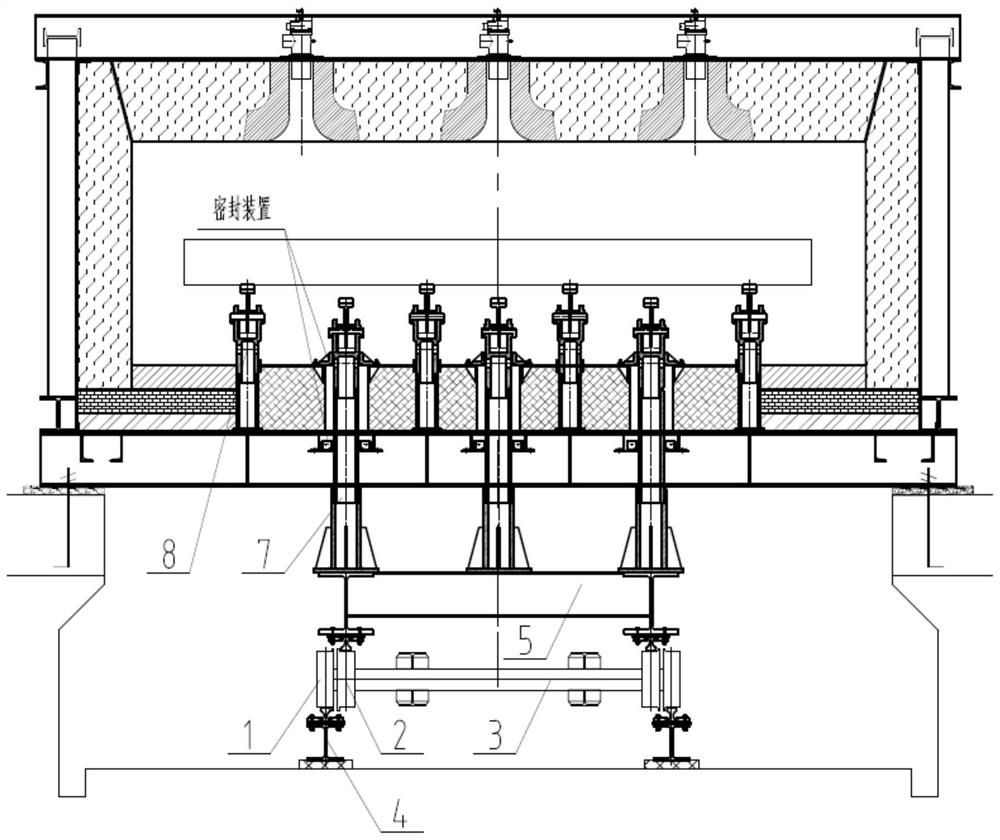
图1为本发明提供的设有紧凑型步进机械的步进式加热炉在炉宽方向的断 面图;
图2为本发明提供的设有紧凑型步进机械的步进式加热炉在炉长方向的断 面图;
图3为控制紧凑型步进机械动作的控制关系图。
图4为步进式加热炉活动梁运行轨迹图。
具体实施方式
为了使本发明的目的、技术方案及优点更加清楚明白,下面结合附图及实 施例,对本发明进行进一步详细说明。应当理解,此处所描述的具体实施例仅 仅用于解释本发明,并不用于限定本发明。
参考图1和图2,本发明提供一种设有紧凑型步进机械结构的加热炉,包括 步进式加热炉本体和多个紧凑型步进机械结构,每个紧凑型步进机械结构包括 升降单元和平移单元,升降单元包括斜轨座4、升降滚轮1、升降轴3和升降驱 动设备9,平移单元包括平移滚轮2、平移框架5和平移驱动设备10,升降滚轮 1和平移滚轮2均设有2个,2个升降滚轮1分别转动连接在升降轴3的两端, 2个升降轮1与斜轨座1匹配,升降驱动设备9与升降轴3连接;2个平移滚轮 2分别转动连接在2个升降滚轮1内侧的升降轴3上,2个平移滚轮2与平移框 架5的下表面匹配,平移驱动设备10与平移框架5连接,平移框架5上表面与 步进式加热炉本体连接。
在步进式加热炉本体工作的过程中,单个的紧凑型步进机械结构的工作过 程如下:首先升降驱动设备9驱动升降轴3,使升降轴3带动升降滚轮1在斜轨 座4上做上升运动,此时平移滚轮2也在升降轴3的带动下沿着斜轨座4做上 升运动,同时平移滚轮2与平移框架5做相对运动,即虽然平移滚轮2整体是 上升的,但是转动方向与升降滚轮1相反,从而导致平移框架5整体在水平位 置没有发生变化,只是升高,到达最高点后,平移驱动设备10驱动平移框架5, 平移框架5在平移滚轮2上做前进运动,到达目标位置后,升降驱动设备9驱动升降轴3在斜轨座4上做下降运动,此时平移滚轮2也在升降轴3的带动下 沿着斜轨座4做下降运动,同时平移滚轮2与平移框架5做相对运动,平移框 架5整体在水平位置没有发生变化,只是降低,到达最低点后,平移驱动设备 10驱动平移框架5,平移框架5在平移滚轮2上做后退运动,至初始位置,结 束一个步进动作。
参考图3,通过控制器控制升降驱动设备9和平移驱动设备10,由升降驱 动设备9驱动控制升降轴3运动,由平移驱动设备10驱动控制平移框架5运动。
作为斜轨座4的一种具体结构,同时为了防止升降滚轮1从斜轨座4上脱 落,作为技术方案的改进,所述斜轨座4包括数量均为2个的直角三角形形状 的支撑板401、斜轨道402和限位块403,斜轨道402固定在支撑板401的斜边 上,在支撑板401的斜边最下端,固定设置限位块403。
根据步进动作的要求,优选地,所述支撑板401位于下端的锐角的角度为 11-30°。
优选的,所述升降驱动设备9和所述平移驱动设备10为液压驱动设备或气 压驱动设备或电动驱动设备。
为了实现同步控制,作为技术方案的改进,多个紧凑型步进机械结构的所 述平移框架5为一体结构,步进式加热炉本体的活动梁7的下端固定连接在平 移框架5上。
所述设有紧凑型步进机械结构的加热炉的可平移距离较大,可以根据实际 需要在可平移距离内进行任意设定;通过升降液压缸和平移液压缸的运动,带 动平移框架5进行升降和平移运动,将坯料从装料端运送至出料端方向。
通过活动梁7的矩形运动,钢坯先被步进梁取上固定梁8,再一步步从炉尾 传送至炉子出料端。
在紧凑型步进机械结构的驱动作用下,活动梁7的运行轨迹曲线如图4所 示:
正常生产时活动梁7停在最低最后位,周期运行前活动梁7停“A”点位(“A” 点位为后下位),周期运行时根据运行动作时间表,活动梁7由“A”点位开始 向“B”点位作上升运动,中间有加速、减速过程。活动梁7在“B”点时位于 后上位,活动梁7由“B”点位开始向“C”点位作向前平移运动,中间有加速、 减速过程。活动梁7在“C”时位于前上位,活动梁7由“C”点位开始向“D” 点位作下降运动,中间有加速、减速过程。活动梁7在“D”时位于前下位,活动梁7由“D”点位开始向“A”点位作向后平移运动,中间有加速、减速过程。
为了方便平移滚轮2与平移框架5的连接,作为技术方案的改进,还包括 与所述紧凑型步进机械结构数量相同的平移轨道结构6,平移轨道结构6设置在 所述平移框架5下表面,每个平移轨道结构6与对应位置的所述平移滚轮2匹 配。
为了增加紧凑型步进机械的稳定性,作为技术方案的改进,每个所述紧凑 型步进机械结构设置在混凝土固定基础11上,混凝土固定基础11中部设凹槽, 所述斜轨座4下方设凸起,斜轨座4的凸起与混凝土固定基础11的凹槽匹配, 且斜轨座4通过螺栓固定在混凝土固定基础11上。
在本实施例中,驱动设备选用液压驱动设备,即升降驱动设备9为升降液 压缸,平移驱动设备10为平移液压缸。平移液压缸为中部铰式结构,用于驱动 平移框架5沿水平方向运动。平移液压缸位于出炉端并与加热炉中心线重合, 其尾端铰支座固定在混凝土基础上,活塞杆端与平移框架铰接。当液压缸活塞 杆伸缩时,推动平移框架沿水平方向前进或后退。升降液压缸为尾端铰式结构, 用于驱动提升框架沿提升轨座斜面方向运动。沿加热炉中心线对称布置。其尾 端铰支座固定在混凝土基础上,活塞杆端与升降轴3铰接。当液压缸活塞杆伸 缩时,推动升降轴3沿斜轨座4斜面方向前进或后退,完成升降轴3的上升和 下降。
为了实现控制的一致性,还可以设置H型钢升降梁,将不同的紧凑型步进 机械的升降轴3连接起来,形成一个升降框架,升降液压缸即可实现所有升降 轴3的一致性控制。
为了控制的精确性,作为技术方案的改进,紧凑型步进机械结构上同时设 计升降框架和平移框架的定心装置,同时还在炉底机械部分设计了行程检测器, 对炉底机械的每一个步进行程都得到了行程检测,上一个步进行程的偏差就在 下一个步进行程得到了纠正,保证了坯料在炉内位置的精度。定心装置为安装 在基础的侧部导向辊,为外定心装置,保证框架沿炉子中心线运行,防止坯料 跑偏。
紧凑型步进机械机构具有正循环、逆循环、踏步、中间保持、步进等待等 功能,所有功能均由电磁比例阀控制实现液压缸动作;在驱动装置上安装线性 位移传感器监测每一个移动的到位率(设定的移动距离),并在下一个相同的移动 中进行修正或补偿,要求自动控制和手动操作。
紧凑型步进机械的可平移距离较大,可以根据实际需要在可平移距离内进 行任意设定;通过升降液压缸和平移液压缸的运动,带动平移框架5进行升降 和平移运动,将坯料从装料端运送至出料端方向。
通过紧凑型步进梁的矩形运动,钢坯先被步进梁取上固定梁8,再一步步从 炉尾传送至炉子出料端。