架空线路反无人机装置、系统、控制方法及计算机设备
文献发布时间:2023-06-19 13:45:04
技术领域
本发明涉及无人机技术领域,特别是涉及一种架空线路反无人机装置、系统、控制方法及计算机设备。
背景技术
近年来,随着无人机技术的高速发展,无人机的应用场景也在日益增加,例如军事、农业、摄影等等。但随着无人机应用场景的拓展,也有人随意或恶意使用无人机,对于无人机的使用,各国也在逐渐出台一些管理办法,但对于一些体型较小的无人机,隐秘性较高,可以通过无线电遥控,数据网络遥控,更可以通过视频遥信使用“第一人称视角”飞行,或利用卫星导航自主飞行。它们可以利用红外线或超声波监测并自动躲过障碍物,可以穿越树林,也可作贴地飞行。仅仅通过普通的管理办法难以禁止无人机的恶意使用,出于反恐与备战的需要,各国很多政府部门都在订立对“关键基建”的保护预防方案,用于避免无人机对基建进行破坏。
其中,电力系统有很多设备都装有高压裸露的带电部件,如发电厂的高压出线场,露天开关站,而更多的,是分布幅原广阔的高压架空线,极容易受到无人机的有意或无意的干扰,现在的小型无人机就可以做到对同一电力网的关键线路同时多位点进行短路攻击,以达到最大的破坏效果,造成大规模停电,或是系统停顿,若不采取保护措施,可能会造成巨大损失。
发明内容
基于此,有必要提供一种架空线路反无人机装置、系统、控制方法及计算机设备,能够保护架空线路不受无人机损害。
一种架空线路反无人机装置,包括设置于所述架空线路杆塔上的:
信号发生器,用于产生干扰无人机的干扰信号;
阻抗匹配耦合组件,电连接所述信号发生器,还用于电连接架空线路的相线,并用于将所述干扰信号耦合至所述架空线路的相线上;
控制器,用于控制所述信号发生器产生所述干扰信号。
在其中一个实施例中,还包括:
监测设备,用于在监测到无人机时,输出警示信号;
所述控制器还用于在获取到所述监测设备输出的警示信号时,控制所述信号发生器产生所述干扰信号。
在其中一个实施例中,所述监测设备包括:
电磁波信号监测器,用于在监测到无人机发射的电磁波信号时,输出警示信号。
在其中一个实施例中,所述监测设备包括:
音视频监控器,用于在监测到无人机的视像信息和/或所述无人机发出的音频信息时,输出警示信号。
在其中一个实施例中,所述干扰信号包括:无人机遥控频道干扰信号、蜂窝网络干扰信号和/或卫星导航干扰信号。
在其中一个实施例中,还包括:
功率放大器,分别电连接所述信号发生器及所述阻抗匹配耦合器,用于放大所述信号发生器产生的干扰信号,并将放大后的所述干扰信号输出至所述阻抗匹配耦合器。
在其中一个实施例中,还包括:通信组件,与所述控制器电连接,用于与反无人机控制中心交互。
一种架空线路反无人机系统,包括供电装置及如上述的架空线路反无人机装置:
所述供电装置用于为所述架空线路反无人机装置提供电源。
在其中一个实施例中,所述供电装置包括:
绝缘子,用于安装在架空线路不同相的相导体之间,所述绝缘子具有绝缘介质;
导电层,沿所述绝缘器件的绝缘介质中在工频带电后形成的等电位层设置,用于形成电极;任意两个具有不同电位的所述电极用于为架空线路反无人机装置供电。
在其中一个实施例中,所述导电层至少为一层,每个所述导电层分别沿所述绝缘介质中的不同等电位层设置,任意一层所述导电层与所述绝缘子上的接相端电极用于电连接所述架空线路反无人机装置,以为所述架空线路反无人机装置供电。
一种架空线路反无人机装置的控制方法,应用于如上述的架空线路反无人机装置或如上述的架空线路反无人机系统;所述方法包括:
根据预设周期输出控制信号,所述控制信号用于控制所述架空线路反无人机装置的信号发生器产生干扰信号。
在其中一个实施例中,所述方法还包括:
获取监测设备输出的警示信号;所述监测设备用于在监测到无人机时输出警示信号;
根据所述警示信号输出所述控制信号。
在其中一个实施例中,还包括:
所述控制信号在输出预设时间后停止。
在其中一个实施例中,所述方法还包括:
将所述监测设备监测到的无人机的视像信息和/或所述无人机发出的音频信息与预设的特征信息进行比对,以识别所述无人机的型号;所述特征信息包括对应于不同型号无人机的样本音频信息和/或样本视像信息;
根据所述无人机的型号选择对应的干扰信号。
一种计算机设备,包括存储器和处理器,所述存储器存储有计算机程序,所述处理器执行所述计算机程序时实现上述方法的步骤。
一种计算机可读存储介质,在内存储有计算机程序,所述计算机程序被处理器执行时实现上述的方法的步骤。
上述架空线路反无人机装置、系统、控制方法及计算机设备,通过控制器控制信号发生器产生用于干扰无人机的干扰信号,利用阻抗匹配耦合器将干扰信号耦合至架空线路的输电相线上,利用输电相线发射干扰信号,使每个杆塔上设置的架空线路反无人机装置所产生的干扰信号能够覆盖更远距离的输电相线区域,各个杆塔上的相互配合以实现覆盖整个架空线路,保护架空线路不受无人机的攻击。
附图说明
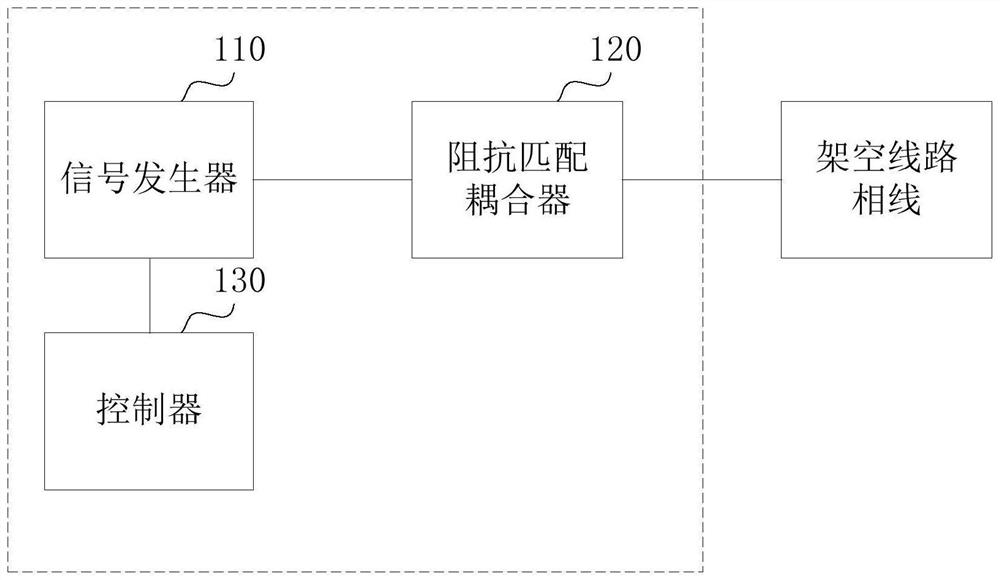
图1为一个实施例中,架空线路反无人机装置的结构框图;
图2为一个实施例中,架空线路反无人机装置的应用场景图;
图3为另一个实施例中,架空线路反无人机装置的结构框图;
图4为又一个实施例中,架空线路反无人机装置的结构框图;
图5为一个实施例中,架空线路反无人机系统的结构框图;
图6为一个实施例中,绝缘器件为盘形绝缘器件且用于近相端取电的供电装置的结构示意图;
图7为一个实施例中,绝缘器件为实心复合材料绝缘子的供电装置结构示意图;
图8为一个实施例中,绝缘器件为盘形绝缘器件且用于近相端取电的供电装置的局部放大结构示意图;
图9为一个实施例中,架空线路反无人机装置的控制方法的流程示意图;
图10为另一个实施例中,架空线路反无人机装置的控制方法的流程示意图;
图11为又一个实施例中,架空线路反无人机装置的控制方法的流程示意图。
具体实施方式
为了便于理解本发明,下面将对本发明进行更全面的描述。但是,本发明可以以许多不同的形式来实现,并不限于本文所描述的实施例。相反地,提供这些实施例的目的是使对本发明的公开内容的理解更加透彻全面。
需要说明的是,当一个元件被认为是“连接”另一个元件,它可以是直接连接到另一个元件并与之结合为一体,或者可能同时存在居中元件。本文所使用的术语“安装”、“一端”、“另一端”以及类似的表述只是为了说明的目的。
除非另有定义,本文所使用的所有的技术和科学术语与属于本发明的技术领域的技术人员通常理解的含义相同。本文中在本发明的说明书中所使用的术语只是为了描述具体的实施例的目的,不是旨在于限制本发明。本文所使用的术语“和/或”包括一个或多个相关的所列项目的任意的和所有的组合。
对于反无人机的措施一般包括监测和打击并用的方式,通过监测无人机飞行时的自我飞行资料广播,可以知道无人机的接近,有些机型的飞行资料广播还包含遥远控制器的坐标,但是如果无人机是用自主飞行模式,即利用卫星导航信息进行程控位点飞行,则会没有广播,或是用蜂窝网络数据进行飞行,也会没有广播,则无法使用广播信息监测,在此情况下,可以利用雷达进行监测。监测到目标无人机后,可以采取软打击,例如信号干扰实现诱降或驱使其返航;也有一些情况是直接采用捕捉或击落的方式进行处理。
基于此,在其中一个实施例中,如图1及图2所示,提供了一种架空线路反无人机装置,包括设置于架空线路杆塔上的:
信号发生器110,用于产生干扰无人机的干扰信号;
阻抗匹配耦合器120,电连接信号发生器110,还用于电连接架空线路的相线,并用于将干扰信号耦合至架空线路的相线上;
控制器,用于控制信号发生器产生干扰信号。
在其中一个实施例中,干扰信号可以是对无人机的遥控频道用干扰信号的波段覆盖,如常见的2.4GHz频率的无线通信信号和5.8GHz频率的无线通信信号,令其无法接收原来的控制信号,或是对无人机所使用的蜂窝网络数据遥控信号进行干扰;还可以对所在地当时的卫星导航的信号加以干扰,或施用诱骗信号,令无人机只能按“失去通信后”的设定模式运行,就是在原地降落,或在原地盘旋,直到能源全耗后掉下,或者通过诱骗干扰信号令无人机往诱骗的坐标飞行。
阻抗匹配是指将信号发生器110或者传输线跟负载之间的建立一种合适的匹配,避免产生反射,能量传递不过去,降低效率。为了保证干扰信号能够以更高的效率输入至架空线路的相线上,使输电相线发射有效的干扰信号,需要利用阻抗匹配耦合器120进行阻抗匹配。
上述架空线路反无人机装置,通过控制器控制信号发生器110产生用于干扰无人机的干扰信号,利用阻抗匹配耦合器120将干扰信号耦合至架空线路的输电相线上,利用输电相线辐射干扰信号,使每个杆塔上设置的架空线路反无人机装置所产生的干扰信号能够覆盖更远距离的输电相线区域,各个杆塔上的相互配合以实现覆盖整个架空线路,保护架空线路不受无人机的攻击。
在其中一个实施例中,如图3所示,架空线路反无人机装置还包括:
监测设备,用于在监测到无人机时,输出警示信号;
控制器还用于在获取到监测设备输出的警示信号时,控制信号发生器产生干扰信号。
为了降低能耗,避免对周边环境的电磁波污染,可以利用监测设备对无人机进行监测,在监测到无人机时,则输出警示信号至控制器,控制器控制信号发生器产生干扰信号,无需持续输出干扰信号。
在其中一个实施例中,控制器根据预设周期向信号发生器输出控制信号,信号发生器在接收到控制信号时产生干扰信号。
即信号发生器根据预设周期来适时产生干扰信号,在其中一个实施例中,控制器可以控制信号发生器每次产生干扰信号时持续一段时间,随后信号发生器停止产生干扰信号,并重新进入待机状态,等待监测到无人机时再次产生干扰信号并持续一段时间后停止。
为了提高对无人机的防御可靠性,避免架空线路受到一些没有广播信号的无人机的攻击,可以配合监测设备进行控制,并且在接收到监测设备输出的警示信号时,向信号发生器输出控制信号,使信号发生器能够在监测到无人机时及时输出干扰信号。在其中一个实施例中,监测设备可以是通过雷达监测、视像监测或音频监测来监测是否有无人机靠近。
在其中一个实施例中,监测设备包括:
电磁波信号监测器,用于在监测到无人机发射的电磁波信号时,输出警示信号。
在其中一个实施例中,信号监测器可以用于监测无人机常用遥控通信频道的信号,如常见的2.4GHz频率的无线通信信号和5.8GHz频率的无线通信信号,控制器根据电磁波信号监测器输出的警示信号,控制信号发生器产生对应的干扰信号,令无人机无法接收原来的控制信号。
在其中一个实施例中,监测设备包括:
音视频监控器,用于在监测到无人机的视像信息和/或无人机发出的音频信息时,输出警示信号。
对于采用自主飞行模式进行飞行的无人机,即利用卫星导航信息进行定位飞行的,则无法利用电磁波信号监测器进行监测。对于这类无人机可以利用雷达监测、音频监测和视频监测。当监察到有飞行物体,并识别到是该飞行物体是无人机时,则输出警示信号至控制器,此时控制器输出控制信号信号发生器,以控制信号发生器产生干扰信号,在其中一个实施例中,干扰信号包括卫星导航干扰信号,能够对使用卫星导航信息进行飞行的无人机进行干扰,使其无法继续执行飞行任务。
在其中一个实施例中,对于采用蜂窝网络移动数据遥控飞行的无人机,则可使用蜂窝网络电磁波信号监测器进行监测。对于这类无人机还可以利用雷达监测、视像监测。当监测到飞行物体并识别到该飞行物体是无人机时,则输出警示信号,此时控制器输出控制信号至信号发生器,以控制信号发生器产生干扰信号。在其中一个实施例中,干扰信号包括蜂窝网络干扰信息,能够使利用蜂窝网络移动数据飞行的无人机受到干扰,使其无法继续执行飞行任务。
在其中一个实施例中,干扰信号包括:无人机遥控频道干扰信号、蜂窝网络干扰信号和/或卫星导航干扰信号。
在其中一个实施例中,信号发生器也可以同时产生多种干扰信号配合使用。
在其中一个实施例中,如图4所示,架空线路反无人机装置还包括:
功率放大器150,分别电连接信号发生器110及阻抗匹配耦合器120,用于放大信号发生器110产生的干扰信号,并将放大后的干扰信号输出至阻抗匹配耦合器120。
一般的信号发生器110难以匹配较高的功率或电压需求,通过功率放大器150能够实现信号放大,同时能够尽可能地保证信号波形不失真,根据干扰信号的需要,利用功率放大器150对信号发生器110产生的干扰信号进行放大后再输入至阻抗匹配耦合器120,阻抗匹配耦合器120再将放大后的干扰信号耦合至架空线路的相线上。
在其中一个实施例中,架空线路反无人机装置还包括:通信组件,与控制器电连接,用于与反无人机控制中心交互。反无人机控制中心可以根据需要发送指令,更改架空线路反无人机装置的的干扰信号产生控制方式,或直接指示架空线路反无人机装置产生或停止产生干扰信号,并且还可以通过与通信组件交互,获取控制器存储的反无人机操作记录。
在其中一个实施例中,如图5所示,提供了一种架空线路反无人机系统,包括供电装置及架空线路反无人机装置:
供电装置用于为架空线路反无人机装置提供电源。
由于架空线路架设地难以接通电源线路,对于设置于架空线路杆塔上的用电设备,无法直接接入普通电源进行供电,但因为架空线路输电相线输送的电压等级较高,远超过普通用电设备的电压等级,因此也无法直接利用输电相线的电能,需要设置专门的供电装置为架空线线路反无人机装置供电。在其中一个实施例中,供电装置可以是蓄电池。
在其中一个实施例中,供电装置还可以是电流互感器取电装置,利用电流互感器的工作原理,从输电相线上取电,产生感应电为架空线路反无人机装置供电。
在其中一个实施例中,如图6所示,提供了一种供电装置,包括:
绝缘器件210,用于安装在架空交流线路不同相的相导体之间或相导体与接地构件之间,绝缘器件210具有绝缘介质
导电层220,沿绝缘器件210的绝缘介质中在工频带电后的自然等电位层设置,用于形成电极;任意两个具有不同电位的电极用于为架空线路反无人机装置供电。
绝缘器件210的类型和安装方式根据架空线路的需求进行选择,本发明的实施不需要改变绝缘器件210的固有安装方式。
绝缘器件能够在架空输电线路杆塔点支撑相导体并且起到绝缘的重要作用。绝缘器件通常由玻璃、陶瓷、复合纤维材料、硅橡胶等绝缘材料211,和连接金具构成。绝缘器件210安装到架空线路上后,会承受到架空线路的电压,绝缘器件210的连接金具之间会存在电势差。在绝缘器件210承受工频电压时,绝缘介质会形成一系列的等电位层,沿着这些等电位层设置导电层220,不同导电层220之间或是导电层220与连接金具之间会有电势差,能够形成至少两个电极。在绝缘器件210受到电压后,不同电位的电极之间会产生电势差,利用任意两个电极之间的电势差即可为架空线路反无人机装置进行供电。
沿绝缘器件210的绝缘介质中的等电位层设置导电层220,利用导电层220形成电极,不同等电位层之间存在电势差,利用绝缘器件210等电位层之间的电势差所形成的任意两个电极作为电源为架空线路反无人机装置供电,能够根据架空线路反无人机装置的电压需要选择合适的等电位层进行取电,利用电容分压原理实现取电,不会受到负载变化或是雷击冲击电流的影响,为架空线路反无人机装置提供稳定可控的电源。
在其中一个实施例中,导电层220至少为一层,每个导电层220分别沿绝缘介质中的不同等电位层设置,任意一层导电层220与绝缘器件210上的接相端电极212分别用于与架空线路反无人机装置电连接,以为架空线路反无人机装置供电。
根据使用需要,可以设置一层或一层以上导电层220,若设置一层导电层220,则导电层220与绝缘器件210上的接相端电极212构成电源的两个电极。导电层220用于作为电源的第一电极;第二电极为绝缘子210上的接相端电极212。每个等电位层都对应一个电压等级,基于等电位层电压等级的不同,每一个第一电极与第二电极的电势差引出成为一组交流电源输出电压。
在其中一个实施例中,导电层220的数量为两层或两层以上,每个导电层220分别沿绝缘介质中的不同等电位层设置,任意两层导电层220用于电连接用电装置,以为架空线路反无人机装置供电。
两层导电层220分别用于作为电源的第一极板和第二极板,由于每个等电位层会对应一个电压等级,因此第一极板与第二极板的电势差即为其输出电压。
若设置两层或两层以上导电层220,则任意两层导电层220能够构成电源两个电极对架空线路反无人机装置进行供电,任意一层导电层220与绝缘器件210上的接相端电极212也能构成电源的两个电极对架空线路反无人机装置进行供电,根据每个导电层220的电位,可以组合成多种不同电压大小的电源,能够为不同电压需求的架空线路反无人机装置供电,使用更加方便。
在其中一个实施例中,绝缘器件210为盘形绝缘子、空心柱式绝缘子、实心柱式绝缘子的一种。
在架空线路中使用的绝缘器件210可以是盘形绝缘子、空心柱式绝缘子、实心柱式绝缘子中的一种或多种组合使用,对于架空线路上额外设置的架空线路反无人机装置,一个杆塔附近的任意一个绝缘器件210替换为上述供电装置即可;对于设置多个架空线路反无人机装置的情况,也可以将多个绝缘器件210替换为上述供电装置进行分别供电。
在其中一个实施例中,如图6所示,绝缘器件210为盘形绝缘子;
导电层220设置于盘形绝缘子的接相端电极212与绝缘材料211之间的粘合材料中。
盘形绝缘子包括接相端电极212、绝缘材料211及接地或近地端电极213,绝缘材料211设置于接地或近地端电极213与接相端电极212之间,接地或近地端电极213和接相端电极212分别通过粘合材料与绝缘材料211粘合固定。若架空线路反无人机装置设置于近相端时,需要利用接相端电极212与导电层220构成电源的两个电极为架空线路反无人机装置供电,才能提供架空线路反无人机装置所需的适当电源电压。
在一个实施例中,粘合材料可以是水泥及其添加剂、树脂、环氧树脂类粘剂、氰基丙烯酸酯类粘剂、甲基丙烯酸酯类厌氧粘剂,也可以是其他绝缘性粘合材料,不同的绝缘子会根据需要进行选择。
在一个实施例中,绝缘器件210的接相端电极212用于与粘合材料连接的连接头端的边缘呈弧面状。
接相端电极212的连接头端的边缘可以通过倒圆角工艺将棱角打磨为弧面。在输电相线的高压下产生的电位分布,在尖端分布特别密集,即尖端的电压较高,若连接头端边缘有棱角,在棱角处电场场强非常高,若受雷击或发生其他过压情况,则会击穿绝缘子。将连接头端的边缘倒圆角,圆角处的电位分布相对稀疏,能够保护绝缘子在过压时不容易发生击穿。
在一个实施例中,导电层220与接相端电极212的表面之间的间距处处相等,产生一层厚度均匀的电介质层,保证两个电极之间的表面各处的电荷尽可能地均匀分布,能够输出更加稳定的电压。
在一个实施例中,也可以是设置两层或两层以上的导电层220,取其中两层导电层220构成电源的两个电极为架空线路反无人机装置供电。
在其中一个实施例中,如图7所示,绝缘器件210为实心柱式绝缘子,导电层220设置于实心柱式绝缘子的裙边内。
绝缘器件210的芯棒是由环氧树脂和玻璃纤维主要原料加其它添加剂通过引拔制成的,芯棒是绝缘材质,由于其材料分布均匀,实心柱式绝缘子上下两端的连接金具之间构成电容,在芯棒内部形成均匀分布的等电位层,在制作芯棒时沿等电位层设置导电层220,若只有一层导电层220,即可利用导电层220与其中一个接相端电极212构成电源为架空线路反无人机装置供电。
在其中一个实施例中,还可以在裙边上设置两层或两层以上导电层220,在为架空线路反无人机装置供电时,可以根据电压需要,选择具有相应电势差的两层导电层220构成电源,或是具有相应电势差的导电层220与绝缘器件210的接相端电极212构成电源。
在其中一个实施例中,绝缘子210为空心柱式绝缘子,每个导电层220呈环状设置于空心柱式绝缘子的空心管内部,与空心管构成直径不同的同心管。
导电层220可以通过绝缘粘合材料与空心柱式绝缘子的空心管内壁粘合固定,导电层220呈环状设置,用于作为电源的第一电极,空心柱式绝缘子的连接金具与空心管连接的部分也是环形区域,用于作为电源的第二电极。
在一个实施例中,可以设置两层或两层以上导电层220,根据架空线路反无人机装置的电压需要,选择具有相应电势差的两层导电层220构成电源的两个电极进行供电,或是具有相应电势差的导电层220与绝缘器件210的连接金具构成电源的两个电极进行供电。
在其中一个实施例中,导电层220与空心管内壁的表面的间距处处相等,保证电容各处的电荷均匀分布,能够构成输出稳定电压。
在其中一个实施例中,导电层220为金属导电层、非金属导电层或导体结合半导体釉的烧结层中的任意一种。
非金属导电层220可以选择例如石墨烯等非金属导电材料制成的导电层220。烧结是将粉末或粉末压坯加热到低于其中基本成分的熔点的温度,然后以一定的方法和速度冷却到室温的过程,烧结的结果是粉末颗粒之间发生粘结,烧结体的强度增加,把粉末颗粒的聚集体变成为晶粒的聚结体,从而获得所需的物理、机械性能的制品或材料。烧结层即为经过烧结工艺制成的产品,将导体和半导体釉进行烧结获得的烧结层能够融合导体和半导体釉的特性。
在其中一个实施例中,导电层220为网状导电层或多孔环状导电层。
粘合材料粘合完成后较为坚硬,导电层220由于材料的特性,也为非弹性层,而供电装置设置在室外,可能会经受一些恶劣环境,若因为热胀冷缩粘合材料发生膨胀或收缩,网状导电层或多孔环状导电层均具有一定可形变的空间,避免由于粘合材料膨胀收缩导致导电层220损坏。
在其中一个实施例中,供电装置还包括:
第一引线,第一端电连接电容的第一极板,第二端用于电连接架空线路反无人机装置的一输入埠;
第二引线,第一端电连接电容的第二极板,第二端用于电连接架空线路反无人机装置的另一输入埠。
通过第一引线和第二引线电连接架空线路反无人机装置与电容的第一极板和第二极板,通过导电层220形成的电容为架空线路反无人机装置进行供电。
在其中一个实施例中,第一引线和第二引线还外包有绝缘防水外包层232,用于保护第一引线和第二引线。
如图8所示,在其中一个实施例中,第一引线和第二引线用于与架空线路反无人机装置电连接的一端设置于同一个防水接头231,通过防水接头231与架空线路反无人机装置进行连接。
在其中一个实施例中,由于第一引线和第二引线需要穿过绝缘材料211或粘合材料与导电层220或绝缘器件210上的接相端电极212电连接,因此需要在绝缘材料211或粘合材料上开设通孔,供引线穿过,在通孔上还设置有防水封装塞233,能够与引线和通孔紧密贴合,避免雨水等液体流入绝缘子210内部,影响绝缘子210的绝缘性能。
在其中一个实施例中,还提供了一种架空线路反无人机装置的控制方法,应用于如上述实施例中的架空线路反无人机装置或如上述实施例中的架空线路反无人机系统;以应用为架空线路反无人机装置的控制器为例进行说明,如图9所示,所述方法包括:
步骤S100,根据预设周期输出控制信号,控制信号用于控制架空线路反无人机装置的信号发生器产生干扰信号。
控制器根据预设周期输出控制信号,即控制信号发生器根据预设周期产生干扰信号,缩短发出干扰信号的时间,可以避免对周边环境的电磁波污染,还可以降低能耗。
在其中一个实施例中,如图9所示,所述方法还包括:
步骤S200,获取监测设备输出的警示信号;监测设备用于在监测到无人机时输出警示信号。
步骤S300,根据警示信号输出控制信号。
为了提高对无人机的防御可靠性,避免架空线路在信号发生器没有产生干扰信号的期间受到无人机的攻击,可以配合监测设备进行控制,即控制器根据所接收到的无人机相关信息,根据预设周期输出控制信号,并且在接收到监测设备输出的警示信号时,向信号发生器输出控制信号,确保信号发生器能够及时输出干扰信号。
在其中一个实施例中,警示信号包括监测到的无人机的遥控通信频道,控制器根据该频道控制信号发生器产生对应的干扰信号。
在其中一个实施例中,如图10所示,所述方法还包括:
步骤S400,在输出控制信号并持续预设时间后停止。
在监测到无人机时,控制器根据获取到的警示信号输出控制信号至信号发生器,控制信号发生器产生干扰信号。考虑到能耗以及避免影响周围设备的正常通信,在控制器输出控制信号并持续到达预设时间时,停止控制信号产生器产生干扰信号,进入待机状态,若控制器在一定时间内未再次获取到警示信号,则可以判断无人机已经离开或被迫降或是无法正常飞行,此时可以保持停止输出干扰信号的状态,直至再次监测到无人机;若控制器在一定时间内再次获取到警示信号,则控制器再次输出控制信号,以控制信号发生器再次产生干扰信号,继续对无人机进行干扰,直至无人机离开被迫降或或是无法正常飞行。
如图11,在其中一个实施例中,所述方法还包括:步骤S500,将监测设备监测到的无人机的视像信息和/或无人机发出的音频信息与预设的特征信息进行比对,以识别无人机的型号;特征信息包括对应于不同型号无人机的样本音频信息和/或样本视像信息;
步骤S600,根据无人机的型号选择对应的干扰信号。
预设的特征信息中包括对应于不同型号无人机的样本音频信息和/或样本视像信息,控制器通过将监测设备监测到的无人机的视像信息和/或音频信号与特征信息中存储的样本视像信息和/或样本音频信号进行比对,找到相关性最高的样本视像信息和/或样本音频信号,再根据样本视像信息和/或样本音频信号与无人机型号之间的对应关系,确定当前监测到的无人机的型号,并根据无人机的型号控制信号发生器产生对应的干扰信号,以实现精确干扰。
应该理解的是,虽然图9-11的流程图中的各个步骤按照箭头的指示依次显示,但是这些步骤并不是必然按照箭头指示的顺序依次执行。除非本文中有明确的说明,这些步骤的执行并没有严格的顺序限制,这些步骤可以以其它的顺序执行。而且,图9-11中的至少一部分步骤可以包括多个步骤或者多个阶段,这些步骤或者阶段并不必然是在同一时刻执行完成,而是可以在不同的时刻执行,这些步骤或者阶段的执行顺序也不必然是依次进行,而是可以与其它步骤或者其它步骤中的步骤或者阶段的至少一部分轮流或者交替地执行。
在其中一个实施例中,提供了一种架空线路反无人机装置的控制装置,包括:
第一信号输出模块,用于根据预设周期输出控制信号,控制信号用于控制架空线路反无人机装置的信号发生器产生干扰信号。
在其中一个实施例中,架空线路反无人机装置的控制装置还包括:
警示信号获取模块,用于获取监测设备输出的警示信号;监测设备用于在监测到无人机时输出警示信号;
第二信号输出模块,用于根据警示信号输出控制信号。
在其中一个实施例中,架空线路反无人机装置的控制装置还包括:
第三信号输出模块,用于在输出控制信号后达到预设时间停止,若再次获取到警示信号,则再次输出控制信号,直至不再获取到警示信号时停止。关于架空线路反无人机装置的控制装置的具体限定可以参见上文中对于架空线路反无人机装置的控制方法的限定,在此不再赘述。上述架空线路反无人机装置的控制装置中的各个模块可全部或部分通过软件、硬件及其组合来实现。上述各模块可以硬件形式内嵌于或独立于计算机设备中的处理器中,也可以以软件形式存储于计算机设备中的存储器中,以便于处理器调用执行以上各个模块对应的操作。
在其中一个实施例中,提供了一种计算机设备,包括存储器和处理器,存储器中存储有计算机程序,该处理器执行计算机程序时实现以下步骤:
根据预设周期输出控制信号,所述控制信号用于控制所述架空线路反无人机装置的信号发生器产生干扰信号。
在其中一个实施例中,处理器执行计算机程序时还实现以下步骤:
获取监测设备输出的警示信号;所述监测设备用于在监测到无人机时输出警示信号;
根据所述警示信号输出控制信号。
在其中一个实施例中,处理器执行计算机程序时还实现以下步骤:
在输出所述控制信号并持续预设时间后停止。
在其中一个实施例中,处理器执行计算机程序时还实现以下步骤:
将所述监测设备监测到的无人机的视像信息和/或所述无人机发出的音频信息与预设的特征信息进行比对,以识别所述无人机的型号;所述特征信息包括对应于不同型号无人机的样本音频信息和/或样本视像信息;
根据所述无人机的型号选择对应的干扰信号。
在其中一个实施例中,提供了一种计算机可读存储介质,其上存储有计算机程序,计算机程序被处理器执行时实现以下步骤:
根据预设周期输出控制信号,所述控制信号用于控制所述架空线路反无人机装置的信号发生器产生干扰信号。
在其中一个实施例中,计算机程序被处理器执行时还实现以下步骤:
获取监测设备输出的警示信号;所述监测设备用于在监测到无人机时输出警示信号;
根据所述警示信号输出控制信号。
在其中一个实施例中,计算机程序被处理器执行时还实现以下步骤:
在输出所述控制信号并持续预设时间后停止。
在其中一个实施例中,计算机程序被处理器执行时还实现以下步骤:
将所述监测设备监测到的无人机的视像信息和/或所述无人机发出的音频信息与预设的特征信息进行比对,以识别所述无人机的型号;所述特征信息包括对应于不同型号无人机的样本音频信息和/或样本视像信息;
根据所述无人机的型号选择对应的干扰信号。
本领域普通技术人员可以理解实现上述实施例方法中的全部或部分流程,是可以通过计算机程序来指令相关的硬件来完成,所述的计算机程序可存储于一非易失性计算机可读取存储介质中,该计算机程序在执行时,可包括如上述各方法的实施例的流程。其中,本申请所提供的各实施例中所使用的对存储器、存储、数据库或其它介质的任何引用,均可包括非易失性和易失性存储器中的至少一种。非易失性存储器可包括只读存储器(ReadOnly Memory-ROM)、磁带、软盘、闪存或光存储器等。易失性存储器可包括随机存取存储器(Random Access Memory-RAM)或外部高速缓冲存储器。作为说明而非局限,RAM可以是多种形式,比如静态随机存取存储器(Static Random Access Memory-SRAM)或动态随机存取存储器(Dynamic Random Access Memory-DRAM)等。
以上所述实施例的各技术特征可以进行任意的组合,为使描述简洁,未对上述实施例中的各个技术特征所有可能的组合都进行描述,然而,只要这些技术特征的组合不存在矛盾,都应当认为是本说明书记载的范围。
以上所述实施例仅表达了本发明的几种实施方式,其描述较为具体和详细,但并不能因此而理解为对发明专利范围的限制。应当指出的是,对于本领域的普通技术人员来说,在不脱离本发明构思的前提下,还可以做出若干变形和改进,这些都属于本发明的保护范围。因此,本发明专利的保护范围应以所附权利要求为准。