梯度点阵吸能结构及其可编程刚度的手性胞元、3D打印方法
文献发布时间:2023-06-19 09:52:39
技术领域
本发明涉及一种可编程刚度的手性胞元,用于构成点阵结构。
本发明还涉及一种梯度点阵吸能结构,尤其是一种基于可编程刚度手性胞元的梯度点阵吸能结构。
本发明还涉及一种用于成型上述梯度点阵吸能结构的3D打印方法。
背景技术
点阵结构具有轻质、比刚度高、比强度高、吸声隔热等优良特性,被越来越多地应用在在汽车、船舶、航空航天等领域。功能梯度点阵结构(Functionally graded latticestructure)是对点阵结构的一种针对于抗冲击应用的结构优化设计,在轴向冲击下,功能梯度点阵结构具有由低强度层到高强度层逐级失效,在相同质量情况下相较于均匀点阵结构(Uniform lattice structure)能够吸收更多的能量。现有的缓冲吸能梯度点阵结构,一般通过两种方法实现性能梯度设计:
一种方法是调整点阵胞元的杆件直径,即保持每个点阵胞元的外形尺寸不变,仅改变每个胞元的杆件直径,以此实现点阵结构性能的梯度设计,如已公开的中国专利CN107498948A。然而,由于尺寸效应的存在,同等载荷情况下,不同单胞尺寸的点阵结构所表现出来的力学行为并不相同;因此,需要在改变点阵单胞杆件截面尺寸的同时,考虑点阵单胞尺寸对结构整体性能的影响。
另一种方法是调控点阵胞元整体尺寸,即改变每个点阵胞元的整体尺寸,通过过渡层设计,从而实现大点阵胞元与小点阵胞元之间的过渡,最终实现点阵结构的梯度设计,如已公开的发明专利CN109163212A。然而,由于大胞元和小胞元尺寸存在差别,在胞元交界处易产生应力集中现象,因此,应考虑不改变胞元间连接处尺寸的情况下,提高胞元的力学性能,以实现结构性能的梯度设计。
发明内容
本发明针对现有技术的不足,提供一种可编程刚度的手性胞元,该手性胞元具有良好的抗冲击性能,并在轴向压缩时能够产生扭转变形,同时,手性胞元本身具有零泊松比特性,即在压缩过程中,手性胞元整体结构不向外膨胀。使得手性胞元结构在压缩过程中具有较高的平台应力,具有良好的吸能抗冲击的性能。
为实现上述的技术目的,本发明将采取如下的技术方案:
一种可编程刚度的手性胞元,包括胞元结构,该胞元结构包括上环、中环、连接杆、下环,连接杆包括上部连接杆、下部连接杆;其中:
所述的上环、下环具有相同的几何形状,中环位于上环、下环之间,且上环、中环、下环的轴线均与胞元结构的中轴线重合;
所述的上部连接杆,具有若干根;各上部连接杆的两端分别与上环、中环对应连接并倾斜地均匀分布在上环、中环之间,且各上部连接杆均相对于胞元结构的中轴线异面设置,同时各上部连接杆均与胞元结构的中轴线形成夹角ϴ;
所述的下部连接杆,具有若干根;各下部连接杆的两端分别与下环、中环对应连接并倾斜地均匀分布在下环、中环之间,且各下部连接杆均相对于胞元结构的中轴线异面设置,同时各下部连接杆均与胞元结构的中轴线形成夹角-ϴ。
进一步地,所述上部连接杆的数量与下部连接杆的数量、尺寸一致,且每一根上部连接杆与中环的连接位点均处于相邻的两根下部连接杆与中环的连接位点之间。
进一步地,上环、下环的几何形状为圆环。
本发明的另一个技术目的是提供一种基于上述的可编程刚度的手性胞元构建的梯度点阵吸能结构,包括两层以上叠层布置的胞元层;
每一层胞元层均包括若干个刚度相同的胞元结构;叠层布置的各胞元层的刚度,从上到下呈梯度变化;
处于同一胞元层的各胞元结构,相邻的两个胞元结构的上环之间、下环之间均通过横梁连接,而相邻两个胞元结构的中环之间则相间设置;
相邻的两层胞元层之间,处于上方的胞元层为上方胞元层,处于下方的胞元层则为下方胞元层;
上方胞元层的各胞元结构与下方胞元层的各胞元结构一一对应地同轴设置,且上方胞元层的各胞元结构的下环,与对应位置处的下方胞元层胞元结构的上环能够连接成一体或者一体设置。
进一步地,处于同一轴线上的各胞元结构的夹角ϴ、夹角-ϴ,均按照从上到下呈梯度变化设置,而处于同一轴线上的各胞元结构的连接杆直径、中环内径均对应相同,以实现各胞元层的刚度从上到下呈梯度变化;
或者处于同一轴线上的各胞元结构的连接杆直径,均按照从上到下呈梯度变化设置,而处于同一轴线上的各胞元结构的夹角ϴ、夹角-ϴ、中环内径均对应相同,以实现各胞元层的刚度从上到下呈梯度变化;
或者处于同一轴线上的各胞元结构的中环内径,均按照从上到下呈梯度变化设置,而处于同一轴线上的各胞元结构的夹角ϴ、夹角-ϴ、连接杆直径均对应相同,以实现各胞元层的刚度从上到下呈梯度变化。
进一步地,所述的胞元层包括三层,分别为上胞元层、中胞元层以及下胞元层;其中:
上胞元层各胞元结构的| 夹角ϴ|、中胞元层各胞元结构的| 夹角ϴ|、下胞元层各胞元结构的| 夹角ϴ|按照从大到小的顺序设置;
上胞元层各胞元结构的| 夹角-ϴ|、中胞元层各胞元结构的| 夹角-ϴ|、下胞元层各胞元结构的| 夹角-ϴ|按照从大到小的顺序设置;
任意两个胞元结构的连接杆直径、中环内径均对应相同。
进一步地,所述的胞元层包括三层,分别为上胞元层、中胞元层以及下胞元层;其中:
上胞元层各胞元结构的连接杆直径、中胞元层各胞元结构的连接杆直径、下胞元层各胞元结构的连接杆直径按照从大到小的顺序设置;
任意两个胞元结构的夹角ϴ、夹角-ϴ、中环内径均对应相同。
进一步地,所述的胞元层包括三层,分别为上胞元层、中胞元层以及下胞元层;其中:
上胞元层各胞元结构的中环内径、中胞元层各胞元结构的中环内径、下胞元层各胞元结构的中环内径按照从大到小的顺序设置;
任意两个胞元结构的夹角ϴ、夹角-ϴ、连接杆直径均对应相同。
本发明的再一个技术目的是提供一种梯度点阵吸能结构的3D打印方法,以直径不超过50微米的球形镍钛合金粉末为原材料,采用选区激光熔化技术一体成型上述的梯度点阵吸能结构;加工工艺参数如下:激光功率为250W,扫描速度为1200mm/s,扫描间距为50微米,光斑直径50微米。
根据上述的技术方案,相对于现有技术,本发明具有如下的优点:
1、本发明所述胞元结构具有轴向受压扭转的变形行为,在压缩过程中,表现出零泊松比特性,即在压缩过程中,胞元整体结构不向外膨胀,因此,所述胞元本身具有较高平台应力,有良好的抗冲击性能。
2、本发明将相同刚度的胞元结构由水平短横梁相连形成点阵层(胞元层),将刚度呈梯度变化的点阵层的各胞元结构以下方胞元层的上环和上方胞元层的下环重叠的形式依次向上叠加构成,因此,本发明在保持连接处尺寸不变的情况下,可编程刚度的胞元设计避免梯度点阵结构层间结合处出现应力集中。
3、本申请实例提出一种参数化设计胞元的设计方法,通过调节结构参数,在保持外尺寸不变的情况下,可获得不同力学性能的胞元,而后将不同力学性能胞元应用于点阵结构设计,从而实现点阵结构的梯度设计。
4、本申请实例进一步考虑梯度点阵结构的3D打印方法。选用镍钛记忆合金为基材,对梯度点阵结构进行自支撑结构优化设计,可由选区激光熔化技术一体成形,加工方法简单,成形质量优异,加工时间短。通过工艺探索实验,获得最优加工工艺参数如下:激光功率为250W,扫描速度为1200mm/s,扫描间距为50微米,光斑直径50微米。
基于镍钛合金的超弹性,梯度点阵结构能够产生更大的形变,增强其冲击能量吸收的能力。同时,基于镍钛合金的记忆效应,梯度点阵结构在受冲击变形后,加热至相转变温度以上后,梯度点阵结构能够回复至初始形状,可重复利用。
附图说明
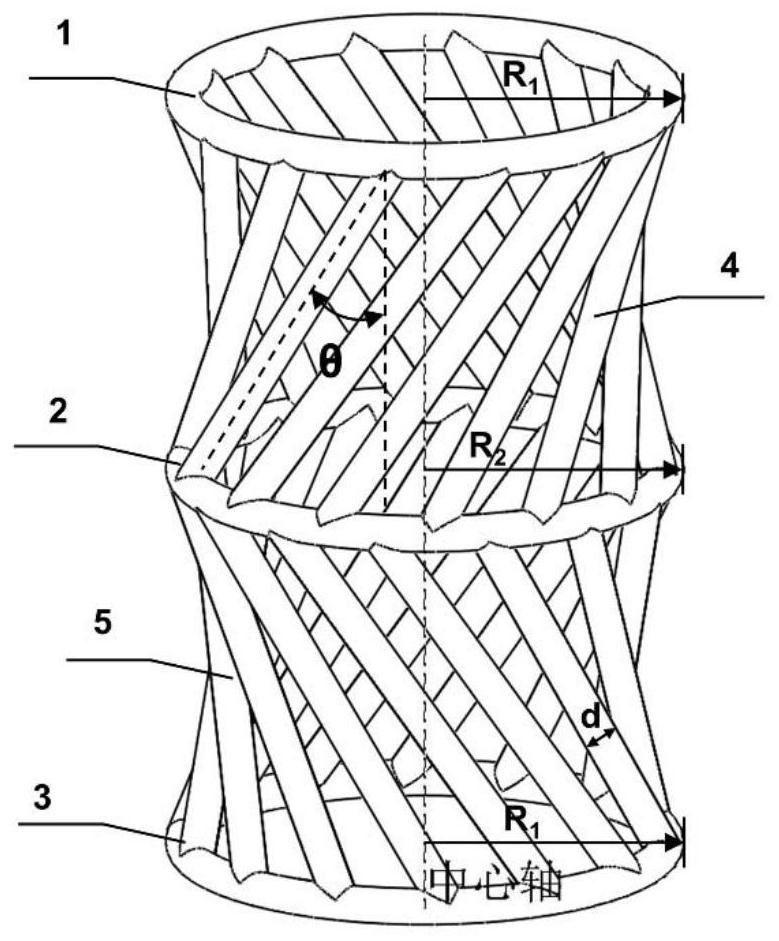
图1 为本发明单个胞体的结构示意图
图2 为本发明单个胞体轴向受压前后变形结构图
图3为本发明不同倾斜角单个胞体轴向压缩力位移曲线图
图4为本发明梯度胞元层单胞排列方式示意图
图5为本发明梯度胞元层排列方式示意图
图6为变角度参数θ胞体构成的梯度点阵结构
图7为变中环尺寸参数R
图8为变上部斜杆4和下部斜杆5直径d胞体构成的梯度点阵结构
图1至8中:上环1;中环2;下环3;上部连接杆4;下部连接杆5;上胞元层6-1;中胞元层6-2;下胞元层6-3。
具体实施方式
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。以下对至少一个示例性实施例的描述实际上仅仅是说明性的,决不作为对本发明及其应用或使用的任何限制。基于本发明中的实施例,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。除非另外具体说明,否则在这些实施例中阐述的部件和步骤的相对布置、表达式和数值不限制本发明的范围。同时,应当明白,为了便于描述,附图中所示出的各个部分的尺寸并不是按照实际的比例关系绘制的。对于相关领域普通技术人员已知的技术、方法和设备可能不作详细讨论,但在适当情况下,所述技术、方法和设备应当被视为授权说明书的一部分。在这里示出和讨论的所有示例中,任何具体值应被解释为仅仅是示例性的,而不是作为限制。因此,示例性实施例的其它示例可以具有不同的值。
为了便于描述,在这里可以使用空间相对术语,如“在……之上”、“在……上方”、“在……上表面”、“上面的”等,用来描述如在图中所示的一个器件或特征与其他器件或特征的空间位置关系。应当理解的是,空间相对术语旨在包含除了器件在图中所描述的方位之外的在使用或操作中的不同方位。例如,如果附图中的器件被倒置,则描述为“在其他器件或构造上方”或“在其他器件或构造之上”的器件之后将被定位为“在其他器件或构造下方”或“在其他器件或构造之下”。因而,示例性术语“在……上方”可以包括“在……上方”和“在……下方”两种方位。该器件也可以其他不同方式定位(旋转90度或处于其他方位)。
实施例1
如图1、2所示,本发明所述的可编程刚度的手性胞元,包括胞元结构,该胞元结构包括上环、上部连接杆、中环、下部连接杆、下环,其中:
所述的上环、下环具有相同的几何形状,附图中,所述的上环、下环均为圆环,其半径为R
所述的上部连接杆,具有若干根;各上部连接杆的两端分别与上环、中环对应连接并倾斜地均匀分布在上环、中环之间,且各上部连接杆均相对于胞元结构的中轴线异面设置,同时各上部连接杆均与胞元结构的中轴线形成夹角ϴ。所述上部连接杆的数量不少于14根,附图中,上部连接杆的数量为14根,上环的下环面均布14个连接位点,分别为连接位点A1、A2……A14;中环的上环面也均布有14个连接位点,分别为连接位点B1、B2……B14;连接位点A1-A14与连接位点B1-B14一一对应,各上部连接杆的两端分别与一组对应的连接位点A
所述的下部连接杆,具有若干根;各下部连接杆的两端分别与下环、中环对应连接并倾斜地均匀分布在下环、中环之间,且各下部连接杆均相对于胞元结构的中轴线异面设置,同时各下部连接杆均与胞元结构的中轴线形成夹角-ϴ;所述下部连接杆的数量与上部连接杆的数量一致,附图中,下部连接杆的数量也为14根,中环的下环面均布14个连接位点,分别为连接位点C1、C2……C14;下环的上环面均布14个连接位点,分别为连接位点D1、D2……D14;连接位点C1-C14与连接位点D1-D14一一对应,各下部连接杆的两端分别与一组对应的连接位点C
上部连接杆、下部连接杆,可为直杆与曲杆,为直杆时杆直径可为变直径和不变直径杆,当其为不变直径直杆时,其杆直径为d。所述夹角ϴ、上环的半径R
为了验证本实例提供的一种零泊松比特性的三维手性扭转胞元所具有的零泊松比特性及其大变形的能力,将本实例所提供的零泊松比特性的三维手性扭转胞元在ANSYS软件中建立有限元模型。所述胞元上部被加载一个均匀分布载荷。
仿真结果如下:
如图2所示,当胞元结构上部施加均匀载荷时,中环2产生旋转,胞元未发生横向膨胀,上部连接杆4和下部连接杆5在压缩过程中发生屈曲,胞元整体结构不向外膨胀,体现了零泊松比和手性结构受压发生扭转的特性,使得胞元结构在压缩过程中具有较高的平台应力,具有良好的吸能抗冲击的性能。单胞力学性能模拟如图3所示,单胞结构随倾斜角增加,整体刚度逐级下降。
实施例2
如图4-6所示,公开了本发明所述的梯度点阵结构的一种具体实施例,其中,包括三层叠层布置的胞元层,从上到下依次为上胞元层、中胞元层以及下胞元层。或者,本发明所述的胞元层只有两层,也或者,本发明所述的胞元层具有四层、五层……,此时,叠层布置的各胞元层的刚度,从上到下呈梯度变化。
每一层胞元层均包括若干个刚度相同的胞元结构;处于同一胞元层的各胞元结构,相邻的两个胞元结构的上环之间、下环之间均通过横梁连接,而相邻两个胞元结构的中环之间则相间设置。
所述的胞元层为多层时,相邻的两层胞元层之间,处于上方的胞元层为上方胞元层,处于下方的胞元层则为下方胞元层;上方胞元层的各胞元结构与下方胞元层的各胞元结构一一对应地同轴设置,且上方胞元层的各胞元结构的下环,与对应位置处的下方胞元层胞元结构的上环能够连接成一体或者一体设置。
换句话来讲,将相同刚度的胞元结构由水平短横梁相连形成点阵层(胞元层),将刚度呈梯度变化的点阵层的各胞元结构以下方胞元层的上环和上方胞元层的下环重叠的形式依次向上叠加构成。
本实施例中,上胞元层、中胞元层以及下胞元层的刚度依次增加,即相对而言,所述的上胞元层为低刚度胞元层,中胞元层为中刚度胞元层,而下胞元层,则为高刚度胞元层。当然,上胞元层、中胞元层以及下胞元层的刚度也可以依次降低。
处于同一轴线上的各胞元结构的夹角ϴ、夹角-ϴ,均按照从上到下呈增加的梯度变化设置,即上胞元层各胞元结构的| 夹角ϴ|、中胞元层各胞元结构的| 夹角ϴ|、下胞元层各胞元结构的| 夹角ϴ|按照从大到小的顺序设置;上胞元层各胞元结构的| 夹角-ϴ|、中胞元层各胞元结构的| 夹角-ϴ|、下胞元层各胞元结构的| 夹角-ϴ|按照从大到小的顺序设置;而处于同一轴线上的各胞元结构的上部连接杆直径、下部连接杆直径、中环内径均对应相同,即任意两个胞元结构的上部连接杆直径、下部连接杆直径、中环内径均对应相同,以实现各胞元层的刚度从上到下呈递减的梯度变化。
本实施例在保持其他结构参数不变的情况下,随夹角ϴ的值增加,胞元在保持外部连接结构尺寸不变的情况下,实现整体刚度下降。
为提高所述梯度点阵结构的抗冲击能力,选用镍钛记忆合金为所述梯度点阵结构基材,镍钛记忆合金具有以下特性:
(1)优良的形状记忆效应与超弹性。普通工程用多晶镍钛合金的形状可回复拉伸应变高达8%,在此形变范围内形状回复率高达100%,并且循环稳定性较好。其形状记忆性能指标可在一定范围内通过热处理及合金化调整。
(2)良好的力学性能。近等原子比的镍钛合金的力学强度及韧性与低-中碳钢的同类性能相近,其力学性能可在很大的范围内通过金属热冷加工及热处理控制。在现有的形状记忆合金中,镍钛合金具有最佳的抗疲劳特性。
(3)优良的抗腐蚀性能与生物相容性。
(4)具有高阻尼特性
(5)具有高反应性和高塑性,不易机加工
因此,所述梯度点阵结构考虑选区激光熔化成形角约束,采用选区激光熔化(3D打印)技术一体成型。通过工艺实验测试,优化后的加工工艺参数如下:激光功率为250W,扫描速度为1200mm/s,扫描间距为50微米,光斑直径50微米。在优化后的激光工艺参数下,选区激光熔化具有高精度的特点,能够成型致密度接近100%的材料,能够保证设计尺寸与实际尺寸的一致性。
实施例3
本实施例与实施例2的不同,在于通过不同的方式来实现各胞元层的刚度变化趋势。具体地,本实施例中,如图7所示,处于同一轴线上的各胞元结构的上部连接杆、下部连接杆直径,均按照从上到下呈递增的梯度变化设置,即上胞元层各胞元结构的上部连接杆/下部连接杆直径、中胞元层各胞元结构的上部连接杆/下部连接杆直径、下胞元层各胞元结构的上部连接杆/下部连接杆直径按照从大到小的顺序设置;而处于同一轴线上的各胞元结构的夹角ϴ、夹角-ϴ、中环内径均对应相同,以实现各胞元层的刚度从上到下呈递增的梯度变化。
本实施例在保持所述胞元结构的其他结构参数不变的情况下,随着连接杆(上部连接杆以及下部连接杆)直径d减小,所述胞元结构在保持外部连接结构尺寸不变的情况下,实现整体刚度下降。
实施例4
本实施例与实施例2的不同,在于通过不同的方式来实现各胞元层的刚度变化趋势。具体地,本实施例中,如图8所示,处于同一轴线上的各胞元结构的中环内径,均按照从上到下呈梯度变化设置,即上胞元层各胞元结构的中环内径、中胞元层各胞元结构的中环内径、下胞元层各胞元结构的中环内径按照从大到小的顺序设置;而处于同一轴线上的各胞元结构的夹角ϴ、夹角-ϴ、上部连接杆直径、下部连接杆直径均对应相同,以实现各胞元层的刚度从上到下呈梯度变化。
即本实施例中,保持所述胞元结构的其他结构参数不变,随着中环半径R
- 基于可编程刚度的手性胞元构建的梯度点阵吸能结构及其3D打印方法
- 梯度点阵吸能结构及其可编程刚度的手性胞元、3D打印方法