一种基于多极磁环结构的ASIL-D等级EPS扭矩转角传感器
文献发布时间:2023-06-19 18:34:06
技术领域
本发明涉及EPS扭矩转角传感器技术领域,尤其是一种基于多极磁环结构的ASIL-D等级EPS扭矩转角传感器。
背景技术
扭矩传感器,一般用来测量驾驶员作用在方向盘上力矩的大小和方向,并将其转换为电信号,动力转向ECU接收此信号及车速信号,决定辅助动力的方向和大小,从而在低速行驶时控制转向力矩变小,在高速行驶时控制转向力矩适度增大,它是电动助力转向系统(EPS)的重要组成元件之一。
扭矩与扭力杆转角呈线性相关,通过采集扭力杆转角信号即可得到扭矩。
经检索,中国实用新型专利授权公开号为CN213932929U的一种四路PWM信号的扭矩传感器,其结构如图10所示,具体包括:与汽车方向盘的输入轴耦接相连的磁环01,多对磁极沿磁环外表面均匀分布;导磁体02,两个该导磁体呈上下位置套设在磁环外周,磁环与导磁体可相对转动,两个该导磁体沿磁环轴线突出的突出条呈交错嵌合分布并在轴向位置产生部分重叠;集磁块03,两个导磁体分别配置有一个集磁块,且该两个集磁块呈上下位置对称分布;贴片型霍尔芯片04,位于两个集磁块上下位置之间的间隙中,具有四路PWM信号输出引脚。
发明内容
为了克服上述现有技术中的缺陷,本发明提供一种基于多极磁环结构的ASIL-D等级EPS扭矩转角传感器,采用一种与现有技术结构不同的新结构,通过分别测量输入轴转角和输出轴转角得到扭力杆转角和方向盘转角,具有很好的可扩展性。
为实现上述目的,本发明采用以下技术方案,包括:
一种基于多极磁环结构的ASIL-D等级EPS扭矩转角传感器,包括:输入轴上安装的输入轴磁环,放置在输入轴磁环侧面的用于测量输入轴转角的输入轴第一芯片,输出轴上安装的输出轴磁环,放置在输出轴磁环侧面的用于测量输出轴转角的输出轴第一芯片,输出轴上连接的与输出轴同时转动的主动齿轮,与主动齿轮相连接的第一从动齿轮和第二从动齿轮,分别安装在第一从动齿轮和第二从动齿轮上的磁铁,与第一从动齿轮上磁铁相对应设置的用于测算输出轴转角的第一齿轮芯片,与第二从动齿轮上磁铁相对应设置的用于测算输出轴转角的第二齿轮芯片。
优选的,所述输入轴第一芯片和输出轴第一芯片均为双Die的霍尔芯片,所述双Die的霍尔芯片包括Die-A和Die-B,输出两路独立的信号。
优选的,所述输入轴第一芯片的Die-A与输出轴第一芯片的Die-B相连接,用于接收输出轴第一芯片所测得的输出轴转角,并根据输入轴第一芯片所测得的输入轴转角和输出轴第一芯片所测得的输出轴转角,得到第一路扭力杆转角信号T1;
所述输出轴第一芯片的Die-A与输入轴第一芯片的Die-B相连接,用于接收输入轴第一芯片所测得的输入轴转角,并根据输出轴第一芯片所测得的输出轴转角和输入轴第一芯片所测得的输入轴转角,得到与第一路扭力杆转角信号T1互为相关的第二路扭力杆转角信号T2。
优选的,在输入轴磁环的侧面还冗余放置有输入轴第二芯片;在输出轴磁环的侧面也冗余放置有输出轴第二芯片。
优选的,所述输入轴第二芯片和输出轴第二芯片均为双Die的霍尔芯片,所述双Die的霍尔芯片包括Die-A和Die-B,输出两路独立的信号;
所述输入轴第二芯片的Die-A与输出轴第二芯片的Die-B相连接,用于接收输出轴第二芯片所测得的输出轴转角,并根据输入轴第二芯片所测得的输入轴转角和输出轴第二芯片所测得的输出轴转角,得到第三路扭力杆转角信号T3;
所述输出轴第二芯片的Die-A与输入轴第二芯片的Die-B相连接,用于接收输入轴第二芯片所测得的输入轴转角,并根据输出轴第二芯片所测得的输出轴转角和输入轴第二芯片所测得的输入轴转角,得到与第三路扭力杆转角信号T3互为相关的第四路扭力杆转角信号T4。
优选的,所述第三输出轴芯片输出输出轴转角P信号,所述第四输出轴芯片输出输出轴转角S信号;
所述第三输出轴芯片和第四输出轴芯片均为双Die的霍尔芯片;所述双Die的霍尔芯片包括Die-A和Die-B,输出两路独立的信号;
所述第三输出轴芯片的Die-A与第四输出轴芯片的Die-B相连接,用于接收第四输出轴芯片的输出轴转角S信号;第三输出轴芯片的Die-A输出第一路输出轴转角P信号即信号P1,以及输出第一路输出轴转角S信号即信号S1;
所述第四输出轴芯片的Die-A与第三输出轴芯片的Die-B相连接,用于接收第三输出轴芯片的输出轴转角P信号;第四输出轴芯片的Die-A输出第二路输出轴转角S信号即信号S2,以及输出第二路输出轴转角P信号即信号P2。
优选的,信号P1和信号S1采用SENT或SPC输出且共用一个输出端,信号P2和信号S2采用SENT或SPC输出且共用一个输出端。
优选的,芯片所输出的信号为PWM、数字SENT、SPC信号中的任意一种。
优选的,互为相关的两路扭力杆转角信号采用SENT或SPC输出且共用一个输出端。
本发明的优点在于:
(1)本发明采用一种与现有技术结构不同的新结构,在电动助力转向系统EPS的输入轴和输出轴上分别安装有一个具有一定周期的多极磁环,在磁环的侧面安装有线性霍尔芯片,用于检测输入和输出轴的转角,并计算出两个角度的角度差,得到扭力杆的相对转角,具有很好的可扩展性。另外,本发明还通过在输出轴上安装一个大齿轮,带动两个含有磁铁的小齿轮转动,测量得到一组输出轴转角信号,也具有很好的可扩展性。
(2)随着智能驾驶和无人驾驶汽车的研究和发展,整车功能安全的提高同样对汽车零部件提出了更高安全等级的要求,尤其是像电动助力转向系统这种核心零部件更是需要达到ASIL-D等级的功能安全指标,因此,起到位置测量反馈的EPS扭矩转角传感器也需要达到ASIL-D等级。本发明利用结构的可扩展性,在输入轴磁环的侧面冗余放置有另外一个双Die霍尔芯片;在输出轴磁环的侧面也冗余放置有另外一个双Die霍尔芯片,从而冗余输出一组扭力杆转角信号T3、T4,使得传感器更加安全,保障数据的有效性,且一定程度上能够自检,提高EPS扭矩转角传感器的安全等级达到ASIL-D等级,从而满足当下车辆智能驾驶以及未来无人驾驶系统对EPS扭矩转角传感器功能安全的需求。
(3)本发明通过双Die霍尔芯片获得多路输出轴转角信号,从而冗余输出一组输出轴转角信号,使得传感器更加安全,保障数据的有效性,且一定程度上能够自检,提高EPS扭矩转角传感器的安全等级达到ASIL-D等级,从而满足当下车辆智能驾驶以及未来无人驾驶系统对EPS扭矩转角传感器功能安全的需求。
(4)现有技术中多采用模拟信号或PWM信号的输出方式,信号中不能包含传感器的故障诊断信号,且随着输出信号的冗余增加,传感器的pin针数量也随之增加,成本也增加。本发明的扭矩转角传感器输出接口采用SENT或SPC通讯方式,可增加信号传输的抗干扰能力,同时,这种通讯方式中可以增加信号校验、可以传输传感器的诊断信息,更能满足传感器的安全可靠性要求。
(5)SENT和SPC协议输出,可以让多路信号共用一根线束,减少连接线束,减少传感器PIN针的数量,有利于降低成本。
(6)本发明的扭矩转角传感器可以实现EPS扭力杆转角以及方向盘转角的多冗余测量,客户端可以灵活运用这些角度信息,对方向盘的绝对位置进行检测,且安全等级高。
附图说明
图1为本实施例的EPS扭矩转角传感器的整体示意图。
图2为本实施例的EPS扭矩转角传感器的输入轴端示意图。
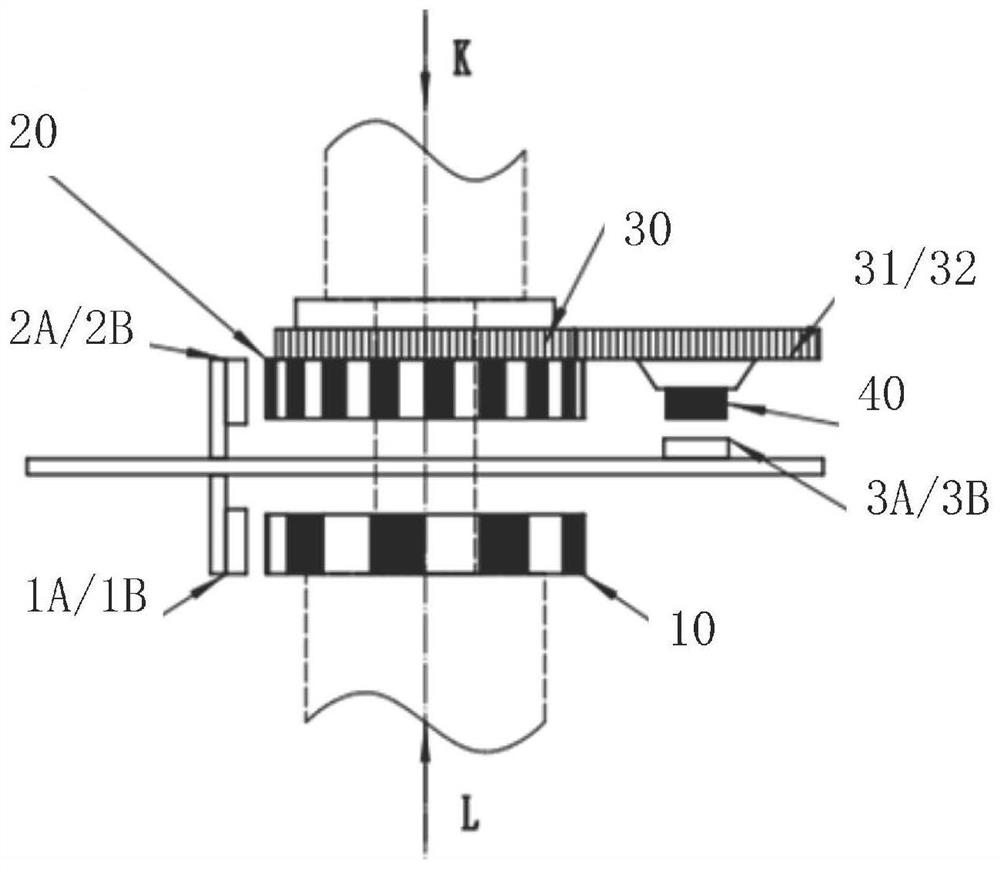
图3为本实施例的EPS扭矩转角传感器的输出轴端示意图。
图4为本实施例的EPS扭矩转角传感器的输入轴第一芯片1A和输出轴第一芯片2A的电路连接示意图。
图5为本实施例的EPS扭矩转角传感器的输入轴第二芯片1B和输出轴第二芯片2B的电路连接示意图。
图6为本实施例的EPS扭矩转角传感器的第一齿轮芯片3A和第二齿轮芯片3B的电路连接示意图。
图7为一组扭力杆转角信号的输出示意图。
图8为输出轴转角P信号的输出示意图。
图9为输出轴转角S信号的输出示意图。
图10为现有技术公开的一种四路PWM信号的扭矩传感器的结构示意图。
具体实施方式
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
由图1-图3所示,本发明的一种基于多极磁环结构的ASIL-D等级EPS扭矩转角传感器,具体结构如下所示:
在汽车方向盘的输入轴L的轴套上安装有一个多极磁环即输入轴磁环10,输入轴磁环10的极对数为N;在输入轴磁环10的侧面放置有两个双Die霍尔芯片,即输入轴第一芯片1A和输入轴第二芯片1B,分别用于测量输入轴磁环10的转角,分别得到输入轴转角,芯片1A和芯片1B输出的信号周期均为360°/N。
在汽车方向盘的输出轴K的轴套上安装有一个多极磁环即输出轴磁环20,输出轴磁环20的极对数为M;在输出轴磁环20的侧面放置有两个双Die霍尔芯片,即输出轴第一芯片2A和输出轴第二芯片2B,分别用于测量输出轴磁环20的转角,分别得到输出轴转角,芯片1A和芯片1B输出的信号周期均为360°/M。
在输出轴K上直连一个主动齿轮30,主动齿轮30与输出轴同时转动;主动齿轮30按照一定的传动比分别连接两个从动齿轮,即第一从动齿轮31和第二从动齿轮32;两个从动齿轮上均安装有双极性磁铁40,每个磁铁40均相对应的设有一个双Die霍尔芯片,分别为第一齿轮芯片3A和第二齿轮芯片3B,分别用于测量第一从动齿轮31和第二从动齿轮32的转角,根据主动齿轮30与第一从动齿轮31和第二从动齿轮32的传动比,分别得到主动齿轮30的转角,从而分别得到输出轴转角,分别得到输出轴转角P信号和输出轴转角S信号。
双Die霍尔芯片中包括两个独立的Die,即Die-A和Die-B,可以输出两路独立的信号。
由图4-图6所示,本发明的一种多极磁环结构的ASIL-D等级EPS扭矩转角传感器的电路连接方式如下所示:
由图4所示,输入轴第一芯片1A的Die-A与输出轴第一芯片2A的Die-B相连接,用于接收输出轴第一芯片2A所测得的输出轴转角,并根据输入轴第一芯片1A所测得的输入轴转角和输出轴第一芯片2A所测得的输出轴转角,得到输入轴与输出轴之间扭力杆的相对转角即扭力杆转角,输入轴第一芯片1A的Die-A输出第一路扭力杆转角信号T1,且扭力杆转角信号以PWM或数字SENT或SPC信号输出。
由图4所示,输出轴第一芯片2A的Die-A与输入轴第一芯片1A的Die-B相连接,用于接收输入轴第一芯片1A所测得输入轴转角,并根据输出轴第一芯片2A所测得的输出轴转角和输入轴第一芯片1A所测得的输入轴转角,得到输入轴与输出轴之间扭力杆的相对转角,输出轴第一芯片2A的Die-A输出第二路扭力杆转角信号T2,且扭力杆转角信号以PWM或数字SENT或SPC信号输出。
由图5所示,输入轴第二芯片1B的Die-A与输出轴第二芯片2B的Die-B相连接,用于接收输出轴第二芯片2B所测得的输出轴转角,并根据输入轴第二芯片1B所测得的输入轴转角和输出轴第二芯片2B所测得的输出轴转角,得到输入轴与输出轴之间扭力杆的相对转角,输入轴第二芯片1B的Die-A输出第三路扭力杆转角信号T3,且扭力杆转角信号以PWM或数字SENT或SPC信号输出。
由图5所示,输出轴第二芯片2B的Die-A与输入轴第二芯片1B的Die-B相连接,用于接收输入轴第二芯片1B所测得的输入轴转角,并根据输出轴第二芯片2B所测得的输出轴转角和输入轴第二芯片1B所测得的输入轴转角,得到输入轴与输出轴之间扭力杆的相对转角,输出轴第二芯片2B的Die-A输出第四路扭力杆转角信号T4,且扭力杆转角信号以PWM或数字SENT或SPC信号输出。
由图6所示,第一齿轮芯片3A的Die-A与第二齿轮芯片3B的Die-B相连接,用于接收第二齿轮芯片3B所测得的输出轴转角S信号;第一齿轮芯片3A的Die-A输出第一齿轮芯片3A的所测得的输出轴转角P信号即第一路输出轴转角P信号即信号P1,以及输出第二齿轮芯片3B所测得的输出轴转角S信号即第一路输出轴转角S信号即信号S1。
由图6所示,第二齿轮芯片3B的Die-A与第一齿轮芯片3A的Die-B相连接,用于接收第一齿轮芯片3A的所测得的输出轴转角P信号;第二齿轮芯片3B的Die-A输出第二齿轮芯片3B所测得的输出轴转角S信号即第二路输出轴转角S信号即信号S2,以及输出第一齿轮芯片3A的所测得的输出轴转角P信号即第二路输出轴转角P信号即信号P2。
本发明中,至少包括2组独立的供电电路,具体供电方式如下所示:
由图4所示,输入轴第一芯片1A的Die-A与输出轴第一芯片2A的Die-B采用第一路供电电源VCC1供电;输出轴第一芯片2A的Die-A与输入轴第一芯片1A的Die-B采用第二路供电电源VCC2供电。
由图5所示,输入轴第二芯片1B的Die-A与输出轴第二芯片2B的Die-B采用第一路供电电源VCC1供电,输出轴第二芯片2B的Die-A与输入轴第二芯片1B的Die-B采用第二路供电电源VCC2供电。
由图6所示,第一齿轮芯片3A的Die-A与第二齿轮芯片3B的Die-B采用第一路供电电源VCC1供电,第二齿轮芯片3B的Die-A与第一齿轮芯片3A的Die-B采用第二路供电电源VCC2供电。
本发明中,第一路扭力杆转角信号T1和第二路扭力杆转角信号T2采用SENT或SPC输出且共用一个输出端,第三路扭力杆转角信号T3和第四路扭力杆转角信号T4采用SENT或SPC输出且共用一个输出端,在保证整体安全等级的情况下,可以减少PIN针的数量和客户端线束的数量,有利于降低成本。
本发明中,第一路输出轴转角P信号即信号P1和第一路输出轴转角S信号即信号S1采用SENT或SPC输出且共用一个输出端,第二路输出轴转角S信号即信号S2和第二路输出轴转角P信号即信号P2采用SENT或SPC输出且共用一个输出端,在保证整体安全等级的情况下,可以减少PIN针的数量和客户端线束的数量,有利于降低成本。
本发明中,扭力信号是与扭力杆转角呈线性相关的信号,如图7所示,两路相关的扭力杆转角信号T1和T2可以是交叉互补输出,也可以是按一定比例输出。
方向盘转角信号即输出轴转角信号P1、P2来自从动齿轮31对应的第一齿轮芯片3A,反应的是输出轴转角的周期性变化,该信号的周期决定于主动齿轮30与从动齿轮31之间的齿轮比,输出轴转角信号P1、P2与输出轴转角的关系曲线如图8所示。
方向盘转角信号即输出轴转角信号S1、S2来自从动齿轮32对应的第二齿轮芯片3B,反应的是输出轴转角的周期性变化,该信号的周期决定于主动齿轮30与从动齿轮32之间的齿轮比,输出轴转角信号S1、S2与输出轴转角的关系曲线如图9所示。
本发明基于霍尔感应传感器原理,在电动助力转向系统EPS的输入轴和输出轴上分别安装有一个具有一定周期的多极磁环,在磁环的侧面安装有多路输出的线性霍尔芯片,用于检测输入输出轴的转角,并计算出两个角度的角度差,得到扭力杆的相对转角。通过在输出轴上安装一个大齿轮,带动两个含有磁铁的小齿轮转动,利用两个多路输出的霍尔芯片测量两个小齿轮的转角,从而输出冗余的方向盘转角信号。最终实现EPS扭矩转角传感器ASIL-D等级功能安全要求。本发明的扭矩转角传感器架构具有灵活的可扩展性,可以实现更高等级的功能安全需求。
本发明的扭矩转角传感器输出多路可以计算方向盘转角信号的角度信息,采用两路Die独立的线性霍尔芯片可以实现更高等级的转角安全等级。客户端可以灵活运用这些角度信息,对方向盘的绝对位置进行检测,且安全等级高。
本发明的扭矩转角传感器输出接口采用SENT或SPC通讯方式,可增加信号传输的抗干扰能力,同时,这种通讯方式中可以增加信号校验、可以传输传感器的诊断信息,更能满足传感器的安全可靠性要求。另外,通讯协议方式能减少连接线束,降低成本。
以上仅为本发明创造的较佳实施例而已,并不用以限制本发明创造,凡在本发明创造的精神和原则之内所作的任何修改、等同替换和改进等,均应包含在本发明创造的保护范围之内。
- 一种基于齿轮结构的ASIL-D等级EPS扭矩转角传感器
- 一种基于FPGA的EPS扭矩转角传感器信号发生器