利用步进电机的发动机数控系统
文献发布时间:2023-06-19 13:27:45
技术领域
本发明涉及一种发动机数控系统,尤其是一种利用步进电机的发动机数控系统。
背景技术
发动机数控系统目前主要使用电液伺服阀作为执行机构,以能控制燃油流量;但当电液伺服阀受到燃油污染或者工作时间长导致泵调节器性能变差时,容易造成燃油流量控制性能变差甚至失控,即存在温度漂移特性,不能精确地控制发动机燃油流量,造成发动机超温、超转潜在风险。
发明内容
本发明的目的是克服现有技术中存在的不足,提供一种利用步进电机的发动机数控系统,其能有效避免油针RDVT传感器采样精度偏差带来控制品质的影响,提高发动机数控系统的可靠性。
按照本发明提供的技术方案,一种利用步进电机的发动机数控系统,包括发动机数控系统本体,所述发动机数控系统本体内燃油泵调节器的执行机构包括步进电机;
通过步进电机进行燃油流量控制时,通过燃油给定量确定步进电机的给定步数Step,在步进电机转动的步数与给定步数Step相一致时,通过RVDT传感器检测得到当前的油针位置Lf,并根据当前油针位置Lf确定步进电机的当前步数step;
确定给定步数Step与当前步数Step间的步数差值,并根据所述步数差值修正步进电机的转动步数。
根据燃油给定量确定步进电机的给定步数Step的方法为:
油针给定值=k*燃油给定量+b;
给定步数Step=(油针给定值-油针反馈值)/c;
其中,k为燃油给定油针给定的差值曲线系数,b为燃油给定油针给定的差值曲线基数,c为步进电机的转动步数对应的油针角度数。
本发明的优点:采用步进电机作为燃油流量控制的执行机构,在进行燃油流量控制时,根据给定步数Step对步进电机的工作过程进行控制,即实现对步进电机的开环控制;步进电机转动给定步数Step后,通过RVDT传感器检测得到当前的油针位置Lf,并根据当前油针位置Lf确定步进电机的当前步数step;确定给定步数Step与当前步数Step间的步数差值,并根据所述步数差值修正步进电机的转动步数,即实现对步进电机的闭环修正,通过修正能够补偿失步造成的危害,并且模型计算能够有效减少传感器误差引入的精度问题。
本发明对步进电机的控制,不依赖RVDT传感器的采集精度及RVDT的解算精度,能防止因RVDT传感器的误差带来的步进电机控制误差也不会因为RVDT传感器及采集回路故障导致步进电机无法控制。并且当前步数Step根据当前的油针位置Lf计算得到,当前步数Step不属于累计量,因此,能够解决步进电机控制的失步问题,从而解决因步进电机失步造成的发动机性能不满足问题,其控稳态性能、动态性能均能够满足控制要求,避免发动机状态的波动,提高发动机数控系统的可靠性。
附图说明
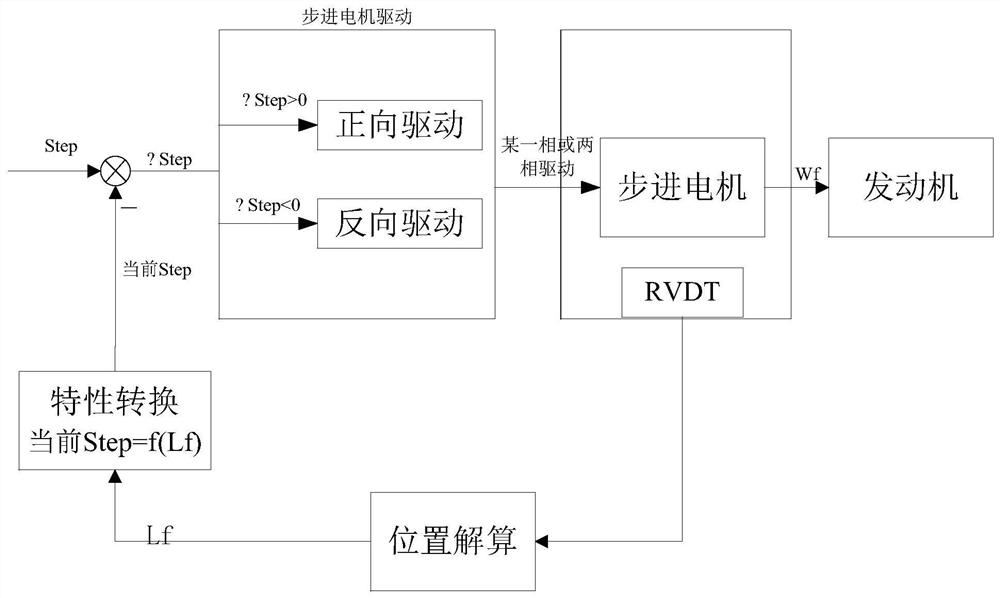
图1为本发明步进电机与发动机配合的控制原理图。
具体实施方式
下面结合具体附图和实施例对本发明作进一步说明。
如图1所示:为了能有效避免油针RDVT传感器采样精度偏差带来控制品质的影响,提高发动机数控系统的可靠性,本发明包括发动机数控系统本体,所述发动机数控系统本体内燃油泵调节器的执行机构包括步进电机;
通过步进电机进行燃油流量控制时,通过燃油给定量确定步进电机的给定步数Step,在步进电机转动的步数与给定步数Step相一致时,通过RVDT传感器检测得到当前的油针位置Lf,并根据当前油针位置Lf确定步进电机的当前步数step;
确定给定步数Step与当前步数Step间的步数差值,并根据所述步数差值修正步进电机的转动步数。
具体地,发动机数控系统本体一般包括与发动机适配的燃油泵调节器,通过燃油泵调节器能控制发动机的燃油流量,本发明实施例中,采用步进电机作为燃油流量控制的执行机构,其余的情况与发动机数控系统本体相一致,此处不再赘述。
具体实施时,发动机工作时,需要确定燃油给定量,燃油给定量一般为已知量,具体与现有相一致。当确定燃油给定量后,根据燃油给定量能确定步进电机的给定步数Step,在得到给定步数Step后,即需要驱动步进电机转动的步数与给定步数Step相一致,以完成一个周期的燃油流量控制。正常情况下,当步进电机的转动步数与给定步数Step相一致时,即有效实现了对发动机燃油流量的控制。但步进电机存在失步的情况,即需要对步进电机的转动步数进行确认与修正。
本发明实施例中,根据燃油给定量确定步进电机的给定步数Step的方法为:
油针给定值=k*燃油给定量+b;
k为燃油给定油针给定的差值曲线系数,b为燃油给定油针给定的差值曲线基数,燃油给定油针给定的差值曲线系数k、燃油给定油针给定的差值曲线基数b可通过对燃油泵调节器的标定得到。
给定步数Step=(油针给定值-油针反馈值)/c;
其中,c为步进电机的转动步数对应的油针角度数。油针反馈值为采集的RVDT传感器的真实角度。具体实施时,步进电机每转动一步时,则油针角度增加0.25°,即此时,c为0.25。
具体实施时,RVDT传感器是角位移传感器,RVDT传感器可以采用现有常用的形式,通过RVDT传感器获取油针角度的具体情况与现有相一致,具体为本技术领域人员所熟知,此处不再赘述。通过RVDT传感器能得到油针角度Q的变化,具体地,油针开度是油针位置的物理表示,单位是度。由于油针传感器是RVDT传感器,采集的物理信号是电压值VA/VB,通过所述两个电压值VA/VB能计算得到sinQ、cosQ,进而通过tanQ来计算出角度值Q,即能获取油针位置Lf,具体与现有相一致,为本技术领域人员所熟知,此处不再赘述。
由于步进电机的转动步数是与油针角度Q成正比,走一步就是角度增加0.25°,所以,根据公式,Q=k1*当前步数,其中,k1=0.25,即根据油针位置Lf能够反算出当前步数Step。
由于实际的步进电机存在失步情况,会造成步进电机的实际转动步数与给定步数Step不一致的情况,即油针位置的实际值与油针给定值不一致的情况,所以,需要根据当前油针的位置Lf,当前步数Step。确定给定步数Step与当前步数Step间的步数差值,所述步数差值作为下周期输出的步数控制值。下个周期时,根据所述步数差值来控制实际的步数。由于计算的步数差值可能很大,例如20步,但步进电机实际每个6ms只能走3步,因此,下个周期仍然需要计算步数差继续控制,循环进行,直至根据步数差值控制的实际转动步数与给定步数Step相一致,从而能确保通过步进电机对发动机燃油流量控制时,实际的流量控制与目标燃油流量控制相一致,或在一个允许的范围内。
本发明采用步进电机作为燃油流量控制的执行机构,在进行燃油流量控制时,根据给定步数Step对步进电机的工作过程进行控制,即实现对步进电机的开环控制;步进电机转动给定步数Step后,通过RVDT传感器检测得到当前的油针位置Lf,并根据当前油针位置Lf确定步进电机的当前步数step;确定给定步数Step与当前步数Step间的步数差值,并根据所述步数差值修正步进电机的转动步数,即实现对步进电机的闭环修正,通过修正能够补偿失步造成的危害,并且模型计算能够有效减少传感器误差引入的精度问题。
本发明对步进电机的控制,不依赖RVDT传感器的采集精度及RVDT的解算精度,能防止因RVDT传感器的误差带来的步进电机控制误差也不会因为RVDT传感器及采集回路故障导致步进电机无法控制。并且当前步数Step根据当前的油针位置Lf计算得到,当前步数Step不属于累计量,因此,能够解决步进电机控制的失步问题,从而解决因步进电机失步造成的发动机性能不满足问题,其控稳态性能、动态性能均能够满足控制要求,避免发动机状态的波动,提高发动机数控系统的可靠性。
- 利用步进电机的发动机数控系统
- 双头螺杆分装机步进电机数控系统