一种湖泊底栖生物观测装置
文献发布时间:2023-06-19 18:30:43
技术领域
本发明涉及水环境监测设备领域,更具体地说,涉及一种湖泊底栖生物观测装置。
背景技术
底栖动物是淡水生态系统的一个重要生态类群,主要包括寡毛类、软体动物和昆虫幼虫等,起促进有机质分解、加速自净过程等作用,是维持健康生态系统的关键成员,在渔业上,底栖动物是鱼类等经济水生动物如中华鲟、鳗鲡、青鱼、河蟹等的天然优质食料,在水环境监测上,底栖动物已作为有机污染的重要指示生物,起水下哨兵的作用,因此人们在对水生态环境进行监测时也会对底栖生物进行观测。
目前人们通常把底栖生物打捞出来进行观测或者人直接潜入水底进行观测,观测过程费时费力,而且不能实时准确地反映底栖生物的具体情况,为此,申请号为CN202020266501.5的专利提出了一种湖泊水库底栖生物观测装置,其主要由沉水构件和漂浮构件构成,沉水构件沉到水底起实时拍摄作用,漂浮构件漂浮在水面上并与沉水构件电连接,起到供能和信息传输的作用,但是其沉水构件上的镜头直接固定在水底,拍摄区域较小,仍然不能准确地反映底栖生物的具体情况,而且镜头长时间在水下工作,水中生物会在镜头表面附着并产生排泄物,遮挡了镜头,导致镜头拍摄不到底栖生物的情况,因此亟需设计一种湖泊底栖生物观测装置。
发明内容
1.要解决的技术问题
针对现有技术中存在的目前人们通常把底栖生物打捞出来进行观测或者人直接潜入水底进行观测,观测过程费时费力,而且不能实时准确地反映底栖生物的具体情况,为此,申请号为CN202020266501.5的专利提出了一种湖泊水库底栖生物观测装置,其主要由沉水构件和漂浮构件构成,沉水构件沉到水底起实时拍摄作用,漂浮构件漂浮在水面上并与沉水构件电连接,起到供能和信息传输的作用,但是其沉水构件上的镜头直接固定在水底,拍摄区域较小,仍然不能准确地反映底栖生物的具体情况,而且镜头长时间在水下工作,水中生物会在镜头表面附着并产生排泄物,遮挡了镜头,导致镜头拍摄不到底栖生物的情况的问题,本发明的目的在于提供一种湖泊底栖生物观测装置,它可以很好的解决背景技术中提出的问题。
2.技术方案
为解决上述问题,本发明采用如下的技术方案。
一种湖泊底栖生物观测装置,包括沉底结构,所述沉底结构包括轻质锥帽,轻质锥帽的底面上固定连接有外螺纹上接管,外螺纹上接管的外部螺纹套接有透视管,透视管的底端螺纹套接有外螺纹下接管,外螺纹下接管的底端固定连接有轻质封堵盘,轻质封堵盘的底面固定连接有位于其中部的配重竖杆,配重竖杆的底端固定连接有配重底板,轻质封堵盘的顶面上固定安装有伺服小马达,伺服小马达上输出轴的端部上固定套接有驱动锥齿轮,轻质锥帽的内部设有综合功能构件,综合功能构件的顶端与水面的漂浮构件连接,综合功能构件的底端延伸至透视管的内部并连接在轻质封堵盘的顶面上,轻质封堵盘的上方设有从动锥齿轮,从动锥齿轮套接在综合功能构件的外部,从动锥齿轮与驱动锥齿轮啮合,轻质封堵盘的顶面上固定安装有位于从动锥齿轮左侧的智能控制器,外螺纹上接管的内部设有旋转顶盘,旋转顶盘套接在综合功能构件的外部,旋转顶盘的底面上设有位于其左端的观测构件,旋转顶盘的底面上设有位于其右端的阻逆结构。
优选的,所述综合功能构件包括贯穿孔,贯穿孔开设在轻质锥帽的内部,贯穿孔的内壁上开设有密封凹槽,密封凹槽的内部嵌装有密封圈,密封圈的内部活动插接有绝缘旋转管,绝缘旋转管活动插接在贯穿孔的内部,从动锥齿轮、旋转顶盘均固定套接在绝缘旋转管的外部,绝缘旋转管的内壁上开设有密封环槽,密封环槽的内部嵌装有密封环,密封环的内部活动插接有绝缘定位管,绝缘定位管的底端贯穿绝缘旋转管并固定连接在轻质封堵盘的顶面上,绝缘定位管的内部活动插接有牵引线束,牵引线束与绝缘定位管内壁之间的间隙通过胶水密封住,牵引线束的顶端与漂浮构件连接,牵引线束的底端从绝缘定位管的底部延伸出来并与智能控制器电连接,绝缘旋转管的底面上开设有托举孔,托举孔与绝缘旋转管的内部空腔连通,托举孔的内部滑动插接有托举盘,托举盘的顶面与托举孔内腔的顶面滑动连接,托举盘固定套接在绝缘定位管的外部。
优选的,还包括传导构件,所述传导构件包括传导腔和传导环槽,传导腔开设在绝缘旋转管的内壁上且位于托举孔的上方,传导腔的内壁上固定连接有传导外环,传导外环活动套接在绝缘定位管的外部,传导外环的内壁上固定连接有传导弹片,传导环槽开设在绝缘定位管的表面上,传导环槽的内部固定嵌装有传导内环,传导内环的表面与绝缘定位管的表面齐平,传导弹片的端部与传导内环的表面滑动连接。
优选的,所述观测构件包括观测翻转板和定位三角挡块,观测翻转板活动连接在旋转顶盘的底面上且位于其左端,观测翻转板上活动插接有位于其中部的观测圆弧轨道,观测圆弧轨道的端部固定连接在旋转顶盘的底面上,观测圆弧轨道的外部活动套接有位于观测翻转板左侧的观测弹簧,观测翻转板通过观测弹簧与旋转顶盘的底面传动连接,定位三角挡块固定连接在旋转顶盘的底面上且位于观测翻转板的左侧,定位三角挡块的右侧面与观测翻转板的左侧面接触,观测翻转板上固定插接有位于其中部的观测摄像头,观测摄像头与透视管对应,观测摄像头的右端固定连接有观测缆线,观测缆线的右端固定插接在绝缘旋转管的表面上且与传导外环电连接。
优选的,所述阻逆结构包括阻逆柱,阻逆柱固定连接在旋转顶盘的底面上且位于其右端,阻逆柱的底端固定连接有阻逆条,阻逆条的顶面上开设有阻逆凹槽,阻逆凹槽的内壁上固定连接有阻逆弹片,阻逆凹槽的内部活动插接有阻逆棘齿轮,阻逆棘齿轮与阻逆弹片单向啮合,阻逆条上的左下角处开设有绕线凹槽,绕线凹槽的内壁上固定安装有绕线轮。
优选的,还包括角度调节机构,所述角度调节机构包括往复螺纹杆和驱动圆弧齿条,往复螺纹杆固定连接在旋转顶盘的底面上且贯穿阻逆棘齿轮、阻逆条,阻逆棘齿轮固定套接在往复螺纹杆的外部,往复螺纹杆活动插接在阻逆条的内部,驱动圆弧齿条固定连接在外螺纹上接管的底面上,往复螺纹杆的外部固定套接有位于阻逆条上方的驱动齿轮,驱动齿轮与驱动圆弧齿条相适配,阻逆棘齿轮的顶面固定连接在驱动齿轮的底面上,往复螺纹杆的外部螺纹套接有位于阻逆条下方的往复滑块,往复滑块上活动插接有位于其右端的定位滑杆,定位滑杆的顶端固定连接在阻逆条的底面上,往复滑块的左侧面上固定连接有角度调节引线,角度调节引线的另一端穿过绕线凹槽并绕过绕线轮且固定连接在观测翻转板的底端上。
优选的,还包括清理机构,所述清理机构包括擦拭圈,擦拭圈活动套接在配重竖杆的外部,擦拭圈的右侧面上固定连接有擦拭平臂,擦拭平臂的右端固定连接有擦拭竖臂,擦拭竖臂的顶端固定连接有擦拭斜臂,擦拭斜臂的另一端固定连接在绝缘旋转管的表面上,擦拭斜臂与轻质锥帽的表面平行,擦拭竖臂上活动插接有擦拭滑杆,擦拭滑杆的左端固定连接有擦拭推板,擦拭滑杆的外部活动套接有擦拭弹簧,擦拭推板通过擦拭弹簧与擦拭竖臂的表面传动连接,擦拭推板的左侧面上固定连接有擦拭橡胶条,擦拭橡胶条与轻质锥帽、透视管、轻质封堵盘的表面均滑动连接。
3.有益效果
相比于现有技术,本发明的优点在于:
通过沉底结构能够将观测构件保护起来,使水中的生物不会在观测构件上生长,确保观测构件能够拍摄到清晰明了的影像视频,通过综合功能构件能够与水面漂浮的工作平台电连接,通过传导构件能够使观测构件与沉底结构保持良好的电连接状态,沉底结构能够通过综合功能构件带着观测构件、阻逆结构和清理机构圆周运动,通过观测构件的圆周运动能够改变其拍摄的方向,拍摄范围较大,增大了观测区域,通过圆周运动的清理机构能够将沉底结构表面附着的生物及其排泄物刮除,确保沉底结构具有良好的透光性,使观测构件拍摄到的影像视频更加清晰明了,便于工作人员清晰明了的观测湖泊底栖生物的情况,通过阻逆结构能够对角度调节机构进行限制,使角度调节机构只能单向旋转,通过角度调节机构能够对观测构件施加来回往复的牵拉力,使观测构件的拍摄角度发生改变,进一步增大了观测构件的拍摄范围,进一步增大了观测区域,观测区域显著增加,提高了该湖泊底栖生物观测装置的实用性。
附图说明
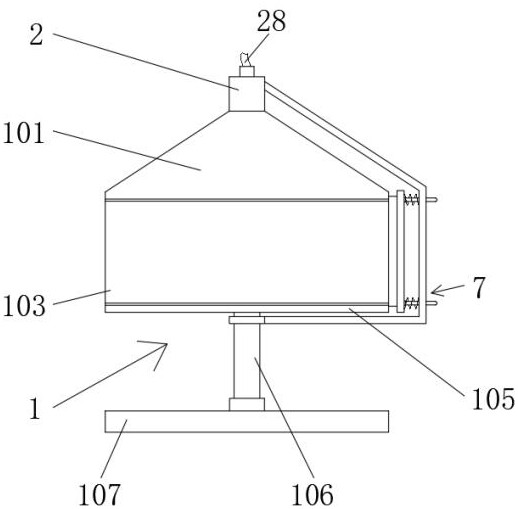
图1为本发明的结构示意图;
图2为本发明图1的内部结构示意图;
图3为本发明图2中综合功能构件的结构示意图;
图4为本发明图2中综合功能构件上半段的内部结构示意图;
图5为本发明图2中综合功能构件下半段的内部结构示意图;
图6为本发明图2中观测构件的结构示意图;
图7为本发明图2中阻逆结构的结构示意图;
图8为本发明图7的内部结构示意图;
图9为本发明图中阻逆棘齿轮的俯视图;
图10为本发明图2中清理机构的结构示意图。
图中标号说明:
1、沉底结构;101、轻质锥帽;102、外螺纹上接管;103、透视管;104、外螺纹下接管;105、轻质封堵盘;106、配重竖杆;107、配重底板;108、伺服小马达;109、驱动锥齿轮;110、从动锥齿轮;111、智能控制器;112、旋转顶盘;2、综合功能构件;20、托举盘;21、贯穿孔;22、密封凹槽;23、密封圈;24、绝缘旋转管;25、密封环槽;26、密封环;27、绝缘定位管;28、牵引线束;29、托举孔;3、传导构件;31、传导腔;32、传导外环;33、传导弹片;34、传导环槽;35、传导内环;4、观测构件;41、观测翻转板;42、观测圆弧轨道;43、观测弹簧;44、定位三角挡块;45、观测摄像头;46、观测缆线;5、阻逆结构;51、阻逆柱;52、阻逆条;53、阻逆凹槽;54、阻逆弹片;55、阻逆棘齿轮;56、绕线凹槽;57、绕线轮;6、角度调节机构;61、往复螺纹杆;62、驱动齿轮;63、往复滑块;64、定位滑杆;65、角度调节引线;66、驱动圆弧齿条;7、清理机构;71、擦拭圈;72、擦拭平臂;73、擦拭竖臂;74、擦拭斜臂;75、擦拭滑杆;76、擦拭推板;77、擦拭弹簧;78、擦拭橡胶条。
具体实施方式
下面将结合本发明实施例中的附图;对本发明实施例中的技术方案进行清楚、完整地描述;显然;所描述的实施例仅仅是本发明一部分实施例;而不是全部的实施例。基于本发明中的实施例;本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例;都属于本发明保护的范围。
请参阅图1-10,一种湖泊底栖生物观测装置,包括沉底结构1,沉底结构1包括轻质锥帽101,轻质锥帽101上的坡面能够阻止泥土等杂物在该观测装置顶部堆积,轻质锥帽101的底面上固定连接有外螺纹上接管102,外螺纹上接管102的外部螺纹套接有透视管103,透视管103顶端与轻质锥帽101底面之间设有密封垫圈,透视管103的底端螺纹套接有外螺纹下接管104,外螺纹下接管104的底端固定连接有轻质封堵盘105,轻质封堵盘105顶面端与透视管103底面之间设有密封垫圈,轻质封堵盘105的底面固定连接有位于其中部的配重竖杆106,配重竖杆106的底端固定连接有配重底板107,轻质封堵盘105的顶面上固定安装有伺服小马达108,伺服小马达108上输出轴的端部上固定套接有驱动锥齿轮109,轻质锥帽101的内部设有综合功能构件2,综合功能构件2的顶端与水面的漂浮构件连接,综合功能构件2的底端延伸至透视管103的内部并连接在轻质封堵盘105的顶面上,轻质封堵盘105的上方设有从动锥齿轮110,从动锥齿轮110套接在综合功能构件2的外部,从动锥齿轮110与驱动锥齿轮109啮合,轻质封堵盘105的顶面上固定安装有位于从动锥齿轮110左侧的智能控制器111,智能控制器111与伺服小马达108电连接,外螺纹上接管102的内部设有旋转顶盘112,旋转顶盘112套接在综合功能构件2的外部,旋转顶盘112的底面上设有位于其左端的观测构件4,旋转顶盘112的底面上设有位于其右端的阻逆结构5,如此设置能够降低对观测构件4拍摄区域内生物的惊扰。
综合功能构件2包括贯穿孔21,贯穿孔21开设在轻质锥帽101的内部,贯穿孔21的内壁上开设有密封凹槽22,密封凹槽22的内部嵌装有密封圈23,密封圈23的内部活动插接有绝缘旋转管24,绝缘旋转管24活动插接在贯穿孔21的内部,从动锥齿轮110、旋转顶盘112均固定套接在绝缘旋转管24的外部,绝缘旋转管24的内壁上开设有密封环槽25,密封环槽25的内部嵌装有密封环26,密封环26的内部活动插接有绝缘定位管27,绝缘定位管27活动插接在绝缘旋转管24的内部,绝缘定位管27的底端贯穿绝缘旋转管24并固定连接在轻质封堵盘105的顶面上,绝缘定位管27的内部活动插接有牵引线束28,牵引线束28与绝缘定位管27内壁之间的间隙通过胶水密封住,牵引线束28的顶端与漂浮构件连接,牵引线束28的底端从绝缘定位管27的底部延伸出来并与智能控制器111电连接,绝缘旋转管24的底面上开设有托举孔29,托举孔29与绝缘旋转管24的内部空腔连通,托举孔29的内部滑动插接有托举盘20,托举盘20的顶面与托举孔29内腔的顶面滑动连接,托举盘20固定套接在绝缘定位管27的外部。
还包括传导构件3,传导构件3包括传导腔31和传导环槽34,传导腔31开设在绝缘旋转管24的内壁上且位于托举孔29的上方,传导腔31的内壁上固定连接有传导外环32,传导外环32活动套接在绝缘定位管27的外部,传导外环32的内壁上固定连接有传导弹片33,传导环槽34开设在绝缘定位管27的表面上,传导环槽34的内部固定嵌装有传导内环35,传导内环35的表面与绝缘定位管27的表面齐平,传导弹片33的端部与传导内环35的表面滑动连接,传导内环35通过导线与智能控制器111电连接,该导线从绝缘定位管27内部穿过。
观测构件4包括观测翻转板41和定位三角挡块44,观测翻转板41活动连接在旋转顶盘112的底面上且位于其左端,观测翻转板41上活动插接有位于其中部的观测圆弧轨道42,观测圆弧轨道42的端部固定连接在旋转顶盘112的底面上,观测圆弧轨道42的外部活动套接有位于观测翻转板41左侧的观测弹簧43,观测翻转板41通过观测弹簧43与旋转顶盘112的底面传动连接,定位三角挡块44固定连接在旋转顶盘112的底面上且位于观测翻转板41的左侧,定位三角挡块44的右侧面与观测翻转板41的左侧面接触,观测翻转板41上固定插接有位于其中部的观测摄像头45,观测摄像头45与透视管103对应,观测摄像头45的右端固定连接有观测缆线46,观测缆线46的右端固定插接在绝缘旋转管24的表面上且与传导外环32电连接。
阻逆结构5包括阻逆柱51,阻逆柱51固定连接在旋转顶盘112的底面上且位于其右端,阻逆柱51的底端固定连接有阻逆条52,阻逆条52的顶面上开设有阻逆凹槽53,阻逆凹槽53的内壁上固定连接有阻逆弹片54,阻逆凹槽53的内部活动插接有阻逆棘齿轮55,阻逆棘齿轮55与阻逆弹片54单向啮合,阻逆条52上的左下角处开设有绕线凹槽56,绕线凹槽56的内壁上固定安装有绕线轮57。
包括角度调节机构6,角度调节机构6包括往复螺纹杆61和驱动圆弧齿条66,往复螺纹杆61固定连接在旋转顶盘112的底面上且贯穿阻逆棘齿轮55、阻逆条52,阻逆棘齿轮55固定套接在往复螺纹杆61的外部,往复螺纹杆61活动插接在阻逆条52的内部,驱动圆弧齿条66固定连接在外螺纹上接管102的底面上,往复螺纹杆61的外部固定套接有位于阻逆条52上方的驱动齿轮62,驱动齿轮62与驱动圆弧齿条66相适配,阻逆棘齿轮55的顶面固定连接在驱动齿轮62的底面上,往复螺纹杆61的外部螺纹套接有位于阻逆条52下方的往复滑块63,往复滑块63上活动插接有位于其右端的定位滑杆64,定位滑杆64的顶端固定连接在阻逆条52的底面上,往复滑块63的左侧面上固定连接有角度调节引线65,角度调节引线65的另一端穿过绕线凹槽56并绕过绕线轮57且固定连接在观测翻转板41的底端上。
还包括清理机构7,清理机构7包括擦拭圈71,擦拭圈71活动套接在配重竖杆106的外部,擦拭圈71的右侧面上固定连接有擦拭平臂72,擦拭平臂72的右端固定连接有擦拭竖臂73,擦拭竖臂73的顶端固定连接有擦拭斜臂74,擦拭斜臂74的另一端固定连接在绝缘旋转管24的表面上,擦拭斜臂74与轻质锥帽101的表面平行,观测构件4和清理机构7分别位于综合功能构件2的左右两侧,擦拭竖臂73上活动插接有擦拭滑杆75,擦拭滑杆75的左端固定连接有擦拭推板76,擦拭滑杆75的外部活动套接有擦拭弹簧77,擦拭推板76通过擦拭弹簧77与擦拭竖臂73的表面传动连接,擦拭推板76的左侧面上固定连接有擦拭橡胶条78,擦拭橡胶条78可以从擦拭推板76上拆卸下来,擦拭橡胶条78与轻质锥帽101、透视管103、轻质封堵盘105的表面均滑动连接。
工作原理:
首先将该观测装置放入湖泊中,然后该观测装置在自身重力的作用下沉入水中,接着配重底板107对该观测装置施加向下的拉力,同时透视管103通过其内部的空腔在水中受到向上的浮力,浮力对该观测装置施加向上的提升力,之后该观测装置在配重底板107重力和透视管103在水中浮力的共同作用下以综合功能构件2竖直朝上的状态缓慢向下移动,与此同时,湖面的漂浮构件通过牵引线束28对该观测装置施加引导力,确保该观测装置以竖直的状态缓慢向下沉去,然后配重底板107坐落在河床上,接着轻质锥帽101、外螺纹上接管102、透视管103、外螺纹下接管104、轻质封堵盘105将观测构件4与水隔离开来,使观测摄像头45不直接与湖水接触,避免水中微生物在观测摄像头45的镜头上附着,之后观测摄像头45透过透视管103对河床附近的底栖生物进行拍摄,然后观测摄像头45将拍摄到的信息通过观测缆线46、传导外环32、传导弹片33、传导内环35传送给智能控制器111,接着智能控制器111将信息通过牵引线束28传输给漂浮构件,由漂浮构件传送至接收终端供观测人员观测,之后智能控制器111控制伺服小马达108缓慢运行,然后伺服小马达108通过驱动锥齿轮109与从动锥齿轮110之间的啮合作用带着绝缘旋转管24转动,接着绝缘旋转管24带着清理机构7转动,之后擦拭推板76在擦拭弹簧77弹力的作用下对擦拭橡胶条78施加压力,然后擦拭橡胶条78压在透视管103的表面上,接着擦拭橡胶条78沿着透视管103的表面滑动并将其表面附着的水生物及其排泄物刮除,与此同时,绝缘旋转管24带着旋转顶盘112转动,之后旋转顶盘112带着观测构件4和阻逆结构5圆周运动,然后观测摄像头45能够对该观测装置的周边底栖生物进行观测,增加了观测范围,接着阻逆结构5带着角度调节机构6圆周运动,之后驱动齿轮62与驱动圆弧齿条66接触并相互啮合,然后驱动圆弧齿条66驱动驱动齿轮62转动,接着驱动齿轮62带着往复螺纹杆61转动,受阻逆弹片54与阻逆棘齿轮55之间单向啮合的作用,往复螺纹杆61只能单向转动,之后往复滑块63在其与往复螺纹杆61之间螺纹配合的作用下向下移动,然后往复滑块63牵拉角度调节引线65,接着角度调节引线65牵拉观测翻转板41,之后观测翻转板41以其与旋转顶盘112之间连接处为中心逆时针翻转,然后观测翻转板41牵拉观测弹簧43,接着观测弹簧43弹性势能增大,之后观测翻转板41带着观测摄像头45的左端向下倾斜,然后观测摄像头45的拍摄角度发生改变,接着驱动齿轮62与驱动圆弧齿条66分开,之后观测摄像头45以新定的拍摄角度拍摄,然后驱动齿轮62第二次与驱动圆弧齿条66接触,接着观测摄像头45的左端再次向下倾斜,之后观测摄像头45以第二次新定的拍摄角度进行拍摄,然后驱动齿轮62与驱动圆弧齿条66第三次接触并啮合,接着驱动齿轮62带着往复螺纹杆61继续转动,之后往复滑块63在其与往复螺纹杆61螺纹配合的作用下从往复螺纹杆61的底端开始向上移动,然后角度调节引线65逐渐松弛,接着观测翻转板41在观测弹簧43弹性拉力的作用下带着观测摄像头45的左端向上抬升,之后驱动齿轮62与驱动圆弧齿条66分开,然后观测摄像头45以第三次新定的角度进行拍摄,然后驱动齿轮62与驱动圆弧齿条66第四次接触并啮合,接着观测摄像头45的左端继续抬升,之后观测翻转板41与定位三角挡块44接触,此时往复滑块63移动至往复螺纹杆61的顶端,然后观测摄像头45以第四次新定的角度进行拍摄,接着驱动齿轮62与驱动圆弧齿条66再次接触并啮合,之后往复滑块63通过其与往复螺纹杆61之间的啮合作用向下移动,如上重复,实现对底栖生物的观测工作,即可。
以上所述;仅为本发明较佳的具体实施方式;但本发明的保护范围并不局限于此;任何熟悉本技术领域的技术人员在本发明揭露的技术范围内;根据本发明的技术方案及其改进构思加以等同替换或改变;都应涵盖在本发明的保护范围内。
- 一种巷道式采空区瓦斯观测装置及观测方法
- 一种水稻根系生长观测装置及观测方法
- 一种巷道表面绝对收敛量的观测装置及观测方法
- 一种用于湖泊动物群落采样的快速自浮式水底张网装置
- 一种简易、无扰动的湖泊表层沉积物采样装置
- 一种湖泊水库底栖生物观测装置
- 一种湖泊底栖生物冲洗收集装置