移动机器人定位丢失检测方法及检测系统
文献发布时间:2023-06-19 18:32:25
技术领域
本发明涉及机器人及自助导航技术领域,特别是一种移动机器人定位丢失检测方法及检测系统。
背景技术
移动机器人确定自身在地图中的位置被称作定位。定位是实现机器人自主导航的核心模块,但是在复杂的现实环境中,即使是最先进的定位算法也可能出现定位丢失。定位丢失将会导致发生危险的情况,特别是当机器人在有人的环境中执行任务时,定位丢失将会产生极大的安全事故。因此,研究如何检测机器人定位是否丢失是一个重要的科学问题。
近年来,随着人工智能技术的快速发展,科研人员研究了很多机器人定位丢失检测的技术。然而,这些传统技术主要采用单次的传感器数据用于检测机器人定位是否丢失,从而在人群密集的真实场景中非常容易失效。
发明内容
为解决现有技术中存在的问题,本发明的目的是提供一种移动机器人定位丢失检测方法及检测系统,本发明解决了传统机器人定位丢失检测算法在人群密集的真实环境中容易失效的问题。
为实现上述目的,本发明采用的技术方案是:一种移动机器人定位丢失检测方法,包括以下步骤:
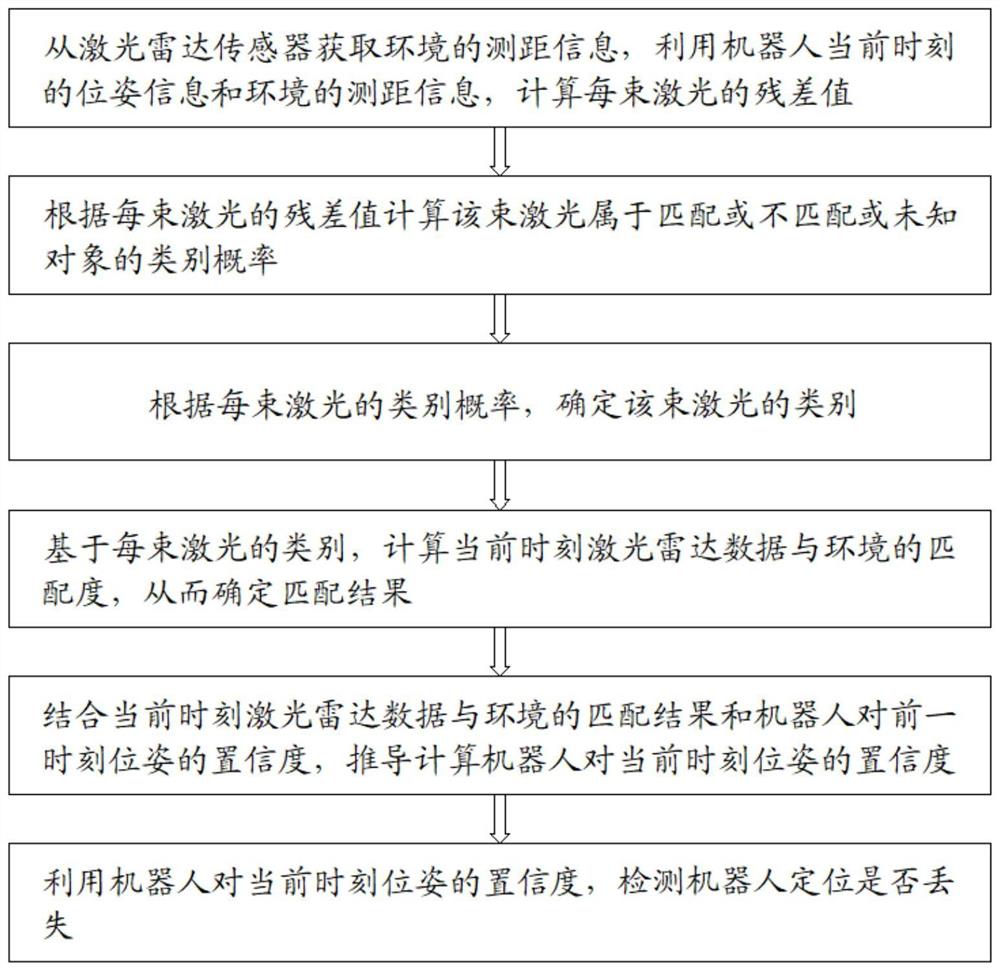
步骤1、从激光雷达传感器获取环境的测距信息,利用机器人当前时刻的位姿信息和环境的测距信息,计算每束激光的残差值;
步骤2、根据每束激光的残差值,计算该束激光属于匹配、不匹配或未知对象的类别概率;
步骤3、根据每束激光的类别概率,确定该束激光的类别;
步骤4、基于每束激光的类别,计算当前时刻激光雷达数据与环境的匹配度,从而确定匹配结果;
步骤5、结合当前时刻激光雷达数据与环境的匹配结果和机器人对前一时刻位姿的置信度,推导计算机器人对当前时刻位姿的置信度;
步骤6、利用机器人对当前时刻位姿的置信度,检测机器人定位是否丢失。
作为本发明的进一步改进,步骤1中,每束激光的残差值的计算方法如下:
机器人利用当前时刻的位姿信息和每束激光的距离信息,通过空间几何关系计算该束激光的终点在世界坐标系中的坐标,再使用搜索算法确定该束激光的终点与最近障碍物的距离得出该束激光的残差值。
作为本发明的进一步改进,所述搜索算法为最近邻搜索算法。
作为本发明的进一步改进,在步骤2中,使用机器学习算法计算激光属于匹配、不匹配或未知对象的类别概率,所述机器学习算法为全连通/非全连通隐变量的马尔科夫随机场、Logistic回归、支持向量机或卷积神经网络。
作为本发明的进一步改进,在步骤3中,根据每束激光的类别概率,利用随机采样的方法确定该束激光的类别。
作为本发明的进一步改进,所述步骤4具体如下:
基于每束激光的类别分别统计被确定为匹配、不匹配与未知对象的激光束个数,将所有激光束个数减去被确定为未知对象的激光束个数的数值记作有效的激光束个数,然后将被确定为匹配的激光束的个数除以有效的激光束个数,得到当前时刻激光雷达数据与环境的匹配度,将匹配度与阈值进行比较,从而确定匹配结果。
作为本发明的进一步改进,所述步骤5具体如下:
基于当前时刻激光雷达数据与环境的匹配结果,计算该次测量结果的似然分布,然后利用贝叶斯滤波器结合机器人对前一时刻位姿的置信度,推导机器人对当前时刻位姿的置信度。
作为本发明的进一步改进,在步骤6中,若机器人对当前时刻位姿的置信度小于一定阈值,则判断机器人定位丢失。
本发明还公开了一种移动机器人定位丢失检测系统,包括:
环境信息获取模块,用于从激光传感器获取环境的测距信息,计算激光雷达数据的残差值;
激光雷达分类模块,用于依据激光雷达数据的残差值计算每束激光属于匹配、不匹配或未知对象的类别概率;
激光雷达识别模块,用于在计算出每束激光属于匹配或不匹配或未知对象的类别概率后,确定每束激光的类别;
环境匹配度计算模块,用于根据每束激光的类别,计算当前时刻激光雷达数据与环境的匹配度,并确定匹配结果;
置信度计算模块,用于结合当前时刻激光雷达数据与环境的匹配结果和机器人对前一时刻位姿的置信度,推导计算机器人对当前时刻位姿的置信度;
定位丢失检测模块,用于根据机器人对当前时刻位姿的置信度判断机器人定位是否丢失。
本发明的有益效果是:
本发明通过计算当前时刻激光雷达数据与环境的匹配度,利用贝叶斯滤波器,结合当前时刻激光雷达数据与环境的匹配结果和机器人对前一时刻位姿的置信度推导计算机器人对当前时刻位姿的置信度,实现检测机器人定位是否丢失,解决了传统机器人定位丢失检测算法在人群密集的真实环境中容易失效的问题。
附图说明
图1为本发明实施例1中检测方法的流程框图;
图2为本发明实施例2中检测系统的结构框图。
具体实施方式
下面结合附图对本发明的实施例进行详细说明。
实施例
如图1所示,一种移动机器人定位丢失检测方法,包括以下步骤:
步骤1、从激光雷达传感器获取环境的测距信息,利用机器人当前时刻的位姿信息和环境的测距信息,计算每束激光的残差值。
具体实现时,机器人利用当前时刻的位姿信息与每束激光的距离信息,通过空间几何关系计算该束激光的终点在世界坐标系中的坐标,再使用搜索算法确定该束激光的终点与最近障碍物的距离,最终得出该束激光的残差值。
为了提高计算效率,通常使用最近邻搜索算法。例如,在搜索最近障碍物时,仅考虑该束激光终点附近10个栅格内是否存在障碍物。若该束激光终点附近5个栅格内不存在障碍物,则将该束激光的终点与最近障碍物的距离设置为1米。
步骤2、根据每束激光的残差值,计算每束激光属于匹配或不匹配或未知对象的类别概率。
使用机器学习算法计算每束激光属于匹配或不匹配或未知对象的类别概率,所述的机器学习方法包括但不限于:全连通/非全连通隐变量的马尔科夫随机场、Logistic回归、支持向量机、卷积神经网络等方法。
例如,当使用全连通/非全连通隐变量的马尔科夫随机场方法时,在计算每束激光属于匹配或不匹配或未知对象的似然函数时,可以假设每束激光属于匹配或不匹配或未知对象的分布分别满足正态分布、指数分布与一致分布。
步骤3、根据每束激光的类别概率,确定每束激光的类别。
根据每束激光属于匹配或不匹配或未知对象的类别概率,利用随机采样技术确定该束激光的类别。
步骤4、基于每束激光的类别,计算当前时刻激光雷达数据与环境的匹配度,并确定匹配结果。
基于每束激光的类别分别统计被确定为匹配,不匹配,与未知对象的激光束个数,将所有激光束个数减去被确定为未知对象的激光束个数的数值记作有效的激光束个数,然后将被确定为匹配的激光束的个数除以有效的激光束个数,得到当前时刻激光雷达数据与环境的匹配度,将匹配度与阈值进行比较,从而确定匹配结果。例如,该阈值通常可以设置为90%,当激光雷达数据与环境的匹配度小于90%时,确定当前时刻激光雷达数据与环境不匹配。
步骤5、结合当前时刻激光雷达数据与环境的匹配结果和机器人对前一时刻位姿的置信度,推导计算机器人对当前时刻位姿的置信度。
基于当前时刻激光雷达数据与环境的匹配结果,计算该次测量结果的似然分布,然后利用贝叶斯滤波器结合机器人对前一时刻位姿的置信度,推导机器人对当前时刻位姿的置信度。
步骤6、根据机器人对当前时刻位姿的置信度,检测机器人定位是否丢失。
若机器人对当前时刻位姿的置信度小于阈值,判断机器人定位丢失。例如,该阈值通常可以设置为80%,当机器人对当前时刻位姿的置信度小于80%时,检测机器人定位丢失。
实施例2
如图2所示,一种移动机器人定位丢失检测系统,包括:
环境信息获取模块,用于从激光传感器获取环境的测距信息,计算激光雷达数据的残差值。
激光雷达分类模块,用于依据激光雷达数据的残差值计算每束激光属于匹配或不匹配或未知对象的类别概率。
激光雷达识别模块,用于在计算出每束激光属于匹配或不匹配或未知对象的类别概率后,确定每束激光的类别。
环境匹配度计算模块,用于根据每束激光的类别,计算当前时刻激光雷达数据与环境的匹配度,并确定匹配结果。
置信度计算模块,用于结合当前时刻激光雷达数据与环境的匹配结果和机器人对前一时刻位姿的置信度,计算机器人对当前时刻位姿的置信度。
定位丢失检测模块,用于根据机器人对当前时刻位姿的置信度,判断机器人定位是否丢失。
以上所述实施例仅表达了本发明的具体实施方式,其描述较为具体和详细,但并不能因此而理解为对本发明专利范围的限制。应当指出的是,对于本领域的普通技术人员来说,在不脱离本发明构思的前提下,还可以做出若干变形和改进,这些都属于本发明的保护范围。
- 供水管网管道健康检测系统与漏点检测定位方法
- 移动机器人的传感器检测控制方法及系统
- 移动机器人定位丢失检测方法、系统、设备及存储介质
- 移动机器人的位姿丢失检测与重定位系统及机器人