一种雷达参数测量误差估计系统及方法
文献发布时间:2023-06-19 18:34:06
技术领域
本发明涉及无线电测量误差领域,具体地说是一种雷达参数测量误差估计系统及方法。
背景技术
目前,关于雷达参数测量误差的估计包括以下两种:通过比对特殊的空中合作目标定位装置提供的位置信息与雷达测量到的目标位置信息,通过比对ADS-B接收设备输出的民航客机ADS-B信息与雷达测量到的目标位置信息。第一种方式需要有合作目标,实际使用过程中需要耗费人力、物力和财力;第二种方式中ADS-B接收设备提供的信息本身就有一定的误差。
发明内容
为了解决现有问题,本发明提供了一种雷达参数测量误差估计系统及方法,具体方案如下:
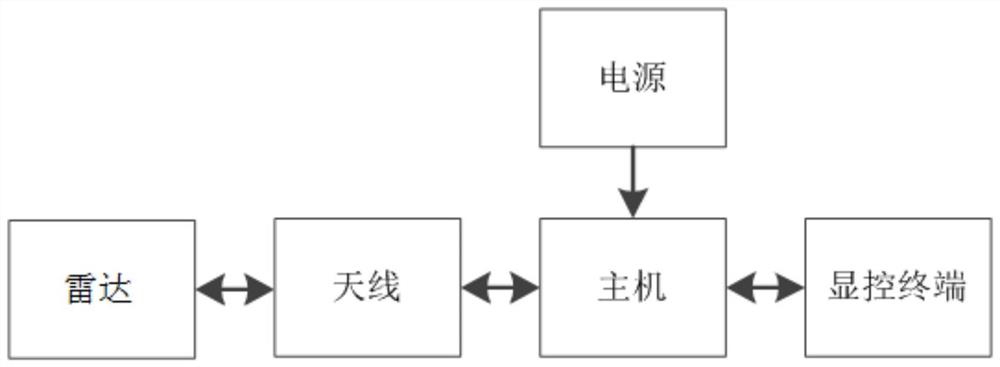
一种雷达参数测量误差估计系统,包括被测的雷达和目标保障及误差估计系统;所述目标保障及误差估计系统包括主机、显控终端、天线以及电源;所述主机分别电连接所述显控终端以及天线,所述电源为所述系统的正常工作提供所需电压;
所述主机通过天线接收雷达射频信号,并结合显控终端上传数据,进行分析处理后,通过天线向外辐射虚拟目标射频信号;
所述天线用于接收雷达射频信号以及向外辐射主机输出的虚拟目标射频信号;
所述显控终端用于显示、规划和确定虚拟雷达站、虚拟目标航迹、虚拟目标射频信号相关调制参数以及雷达参数测量误差的估计。
进一步地,所述主机包括频率源、模拟下变频通道、模数转换单元ADC、数字下变频单元DDC、基带数字信号延时单元、基带数字信号多普勒频移单元、数字上变频单元DUC、数模转换单元DAC、模拟上变频通道及GPS/BDS定位装置;
所述频率源用于为主机各模块的正常工作提供时钟信号,并为模拟下变频通道以及模拟上变频通道提供一本振和二本振信号;
所述下变频通道用于对来自于天线接收的射频信号进行两次混频至中频信号,并输出至模数转换单元ADC;
所述模数转换单元ADC用于对来自于射频模块的中频信号进行采样,形成数字中频信号,并输出至数字下变频单元DDC;
所述数字下变频单元DDC用于对来自于模数转换单元ADC的数字中频信号进行正交解调,形成I、Q基带数字信号,并输出至基带数字信号延时单元;
所述基带数字信号延时单元用于对来自于数字下变频单元DDC的基带数字信号进行距离调制,并输出至基带数字信号多普勒频移单元;
所述基带数字信号多普勒频移单元用于对来自于基带数字信号延时单元的基带数字信号进行速度调制,并输出至数字上变频单元DUC;
所述数字上变频单元DUC用于对来自于基带数字信号多普勒频移单元的I、Q基带数字信号进行上变频至数字中频信号,并输出至数模转换单元DAC;
所述数模转换单元DAC用于对来自于数字上变频单元DUC的数字中频信号进行数模转换为模拟中频信号;
所述上变频通道用于对来自于数模转换单元DAC的中频信号进行两次混频至射频信号,并输出至天线;
所述GPS/BDS定位装置用于获取目标保障及误差估计系统的地理位置信息,并将位置信息通过网线输出至所述显控终端。
进一步地,所述天线包括接收天线和发射天线,所述接收天线用于接收雷达辐射的射频信号并通过射频电缆输出至所述主机,所述发射天线用于接收所述主机通过射频电缆输出的射频信号并向外辐射。
进一步地,所述显控终端包括显示终端和控制终端,所述显示终端用于显示虚拟目标航迹、接收所述主机通过网线输出的GPS/BDS地理位置信息、在平面地图上显示虚拟雷达站地理位置以及雷达参数测量误差估计值;所述控制终端用于确定虚拟目标射频信号的调制参数并通过网线输出至主机、接收雷达输出的目标参数信息并估计雷达参数测量误差。
进一步地,一种雷达参数测量误差估计系统的方法,包括以下步骤:
S1,根据雷达实装的地理位置信息,在所述显示终端的平面地图上标记雷达站的地理位置;同时,根据接收到所述雷达射频信号能量的强弱变化规律,计算出雷达天线的扫描周期T;并根据目标保障及误差估计系统GPS/BDS定位信息(B
S2,根据步骤1中的数据虚拟出所述雷达站任意时刻天线波束主瓣对准的方位;
S3,生成虚拟目标航迹并在显示终端的平面地图上显示;
S4,对虚拟目标射频信号参数的调制;
S5,依据虚拟目标射频信号参数信息和雷达输出目标参数信息,估计雷达参数测量误差。
进一步地,所述步骤1获取步骤2所需数据的过程为:通过控制终端的键盘输入,在显示终端平面地图上标记出虚拟雷达站的地理位置,具体地,依据雷达实装地理位置信息(B
假设目标保障及误差估计系统t
依据雷达站以及目标保障及误差估计系统的地理位置信息(B
依据地球北极点在以地球球心为原点的直角坐标系中的坐标点(X
依据解析几何中两平面的位置关系公式可以确定两平面之间的夹角
依据t
进一步地,所述步骤3的具体步骤包括:
S31,依据虚拟目标射频信号在平面地图上的坐标以及米勒投影坐标转换公式
S32,依据雷达站在以地球球心为原点的直角坐标系中的坐标点(X
S33,依据虚拟目标射频信号的起始点(B
S34,根据设定的虚拟目标射频信号速度v,可得虚拟目标射频信号从起始点到终止点所需的时间
S35,依据虚拟目标射频信号从起始点到终止点所需时间t
进一步地,所述步骤4的调制方法的步骤包括:
S41,依据目标保障及误差估计系统在雷达站的方位θ,雷达站天线扫描周期T以及虚拟目标航迹,如果虚拟目标射频信号被雷达第一次探测到与第二次探测到时方位角变化为Δθ,则虚拟目标射频信号第一次发射的时间与第二次发射的时间间隔为
S42,依据时间间隔Δt以及虚拟目标航迹,可得相邻两次雷达探测到虚拟目标射频信号时,虚拟目标射频信号相对于雷达的距离r
S43,依据相邻两次虚拟目标射频信号相对于雷达的距离r
S44,依据时间间隔Δt以及虚拟目标射频信号飞行速度,可得相邻两次雷达探测到虚拟目标射频信号时,虚拟目标射频信号的飞行距离为r
S45,依据虚拟目标射频信号相对于雷达的实时速度以及多普勒原理,可以确定虚拟目标射频信号频率偏移量
进一步地,所述步骤5的估计方法的步骤包括:
S51,依据雷达输出的目标参数信息时刻t
S52,依据雷达站在以地球球心为原点的直角坐标系中的坐标点(X
S53,依据t
S54,依据所有时刻雷达输出的目标位置信息与虚拟目标射频信号在以雷达站为原点的球坐标系中的坐标值之间的差值,可以计算雷达参数测量系统误差(差值平均值)和随机误差(差值均方差)
本发明的有益效果在于:
本发明可以模拟多条虚拟航线,能够节约大量的人力、物力和财力,且依据虚拟目标射频信号参数信息和雷达输出目标参数信息,估计雷达参数测量误差,避免了现有方式中接收设备提供的信息误差,大大提高了误差测量的准确率。
附图说明
为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作一简单地介绍,显而易见地,下面描述中的附图是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其它的附图。
图1为本发明的系统框图;
图2为本发明的主机组成框图;
图3为本发明的方法流程图。
具体实施方式
为使本发明实施例的目的、技术方案和优点更加清楚,下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地说明,显然,所描述的实施例是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其它实施例,都属于本发明保护的范围。
如图1,一种雷达参数测量误差估计系统,包括被测的雷达和目标保障及误差估计系统;目标保障及误差估计系统包括主机、显控终端、天线以及电源;主机分别电连接显控终端以及天线,电源为系统的正常工作提供所需电压;
主机通过天线接收雷达射频信号,并结合显控终端上传数据,进行分析处理后,通过天线向外辐射虚拟目标射频信号;
天线用于接收雷达射频信号以及向外辐射主机输出的虚拟目标射频信号;
显控终端用于显示、规划和确定虚拟雷达站、虚拟目标航迹、虚拟目标射频信号相关调制参数以及雷达参数测量误差的估计。
如图2,主机包括频率源、模拟下变频通道、模数转换单元ADC、数字下变频单元DDC、基带数字信号延时单元、基带数字信号多普勒频移单元、数字上变频单元DUC、数模转换单元DAC、模拟上变频通道及GPS/BDS定位装置;
频率源用于为主机各模块的正常工作提供时钟信号,并为模拟下变频通道以及模拟上变频通道提供一本振和二本振信号;
下变频通道用于对来自于天线接收的射频信号进行两次混频至中频信号,并输出至模数转换单元ADC;
模数转换单元ADC用于对来自于射频模块的中频信号进行采样,形成数字中频信号,并输出至数字下变频单元DDC;
数字下变频单元DDC用于对来自于模数转换单元ADC的数字中频信号进行正交解调,形成I、Q基带数字信号,并输出至基带数字信号延时单元;
基带数字信号延时单元用于对来自于数字下变频单元DDC的基带数字信号进行距离调制,并输出至基带数字信号多普勒频移单元;
基带数字信号多普勒频移单元用于对来自于基带数字信号延时单元的基带数字信号进行速度调制,并输出至数字上变频单元DUC;
数字上变频单元DUC用于对来自于基带数字信号多普勒频移单元的I、Q基带数字信号进行上变频至数字中频信号,并输出至数模转换单元DAC;
数模转换单元DAC用于对来自于数字上变频单元DUC的数字中频信号进行数模转换为模拟中频信号;
上变频通道用于对来自于数模转换单元DAC的中频信号进行两次混频至射频信号,并输出至天线;
GPS/BDS定位装置用于获取目标保障及误差估计系统的地理位置信息,并将位置信息通过网线输出至显控终端。
天线包括接收天线和发射天线,接收天线用于接收雷达辐射的射频信号并通过射频电缆输出至主机,发射天线用于接收主机通过射频电缆输出的射频信号并向外辐射。
显控终端包括显示终端和控制终端,显示终端用于显示虚拟目标航迹、接收主机通过网线输出的GPS/BDS地理位置信息、在平面地图上显示虚拟雷达站地理位置以及雷达参数测量误差估计值;控制终端用于确定虚拟目标射频信号的调制参数并通过网线输出至主机、接收雷达输出的目标参数信息并估计雷达参数测量误差。
如图3,一种雷达参数测量误差估计系统的方法,包括以下步骤:
S1,根据雷达实装的地理位置信息,在显示终端的平面地图上标记雷达站的地理位置;同时,根据接收到雷达射频信号能量的强弱变化规律,计算出雷达天线的扫描周期T;并根据目标保障及误差估计系统GPS/BDS定位信息(B
S2,根据步骤1中的数据虚拟出雷达站任意时刻天线波束主瓣对准的方位;
S3,生成虚拟目标航迹并在显示终端的平面地图上显示;
S4,对虚拟目标射频信号参数的调制;
S5,依据虚拟目标射频信号参数信息和雷达输出目标参数信息,估计雷达参数测量误差。
步骤1获取步骤2所需数据的过程为:通过控制终端的键盘输入,在显示终端平面地图上标记出虚拟雷达站的地理位置,具体地,依据雷达实装地理位置信息(B
假设目标保障及误差估计系统t
依据雷达站以及目标保障及误差估计系统的地理位置信息(B
依据地球北极点在以地球球心为原点的直角坐标系中的坐标点(X
依据解析几何中两平面的位置关系公式可以确定两平面之间的夹角
依据t
步骤3的具体步骤包括:
S31,依据虚拟目标射频信号在平面地图上的坐标以及米勒投影坐标转换公式
S32,依据雷达站在以地球球心为原点的直角坐标系中的坐标点(X
S33,依据虚拟目标射频信号的起始点(B
S34,根据设定的虚拟目标射频信号速度v,可得虚拟目标射频信号从起始点到终止点所需的时间
S35,依据虚拟目标射频信号从起始点到终止点所需时间t
步骤4的调制方法的步骤包括:
S41,依据目标保障及误差估计系统在雷达站的方位θ,雷达站天线扫描周期T以及虚拟目标航迹,如果虚拟目标射频信号被雷达第一次探测到与第二次探测到时方位角变化为Δθ,则虚拟目标射频信号第一次发射的时间与第二次发射的时间间隔为
S42,依据时间间隔Δt以及虚拟目标航迹,可得相邻两次雷达探测到虚拟目标射频信号时,虚拟目标射频信号相对于雷达的距离r
S43,依据相邻两次虚拟目标射频信号相对于雷达的距离r
S44,依据时间间隔Δt以及虚拟目标射频信号飞行速度,可得相邻两次雷达探测到虚拟目标射频信号时,虚拟目标射频信号的飞行距离为r
S45,依据虚拟目标射频信号相对于雷达的实时速度以及多普勒原理,可以确定虚拟目标射频信号频率偏移量
步骤5的估计方法的步骤包括:
S51,依据雷达输出的目标参数信息时刻t
S52,依据雷达站在以地球球心为原点的直角坐标系中的坐标点(X
S53,依据t
S54,依据所有时刻雷达输出的目标位置信息与虚拟目标射频信号在以雷达站为原点的球坐标系中的坐标值之间的差值,可以计算雷达参数测量系统误差(差值平均值)和随机误差(差值均方差)
本发明可以模拟多条虚拟航线,能够节约大量的人力、物力和财力,且依据虚拟目标射频信号参数信息和雷达输出目标参数信息,估计雷达参数测量误差,避免了现有方式中接收设备提供的信息误差,大大提高了误差测量的准确率。
尽管参照前述实施例对本发明进行了详细的说明,本领域的普通技术人员应当理解:其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分技术特征进行等同替换;而这些修改或者替换,并不使相应技术方案的本质脱离本发明各实施例技术方案的精神和范围。
- 一种用于定量测量雷达系统的外定标系统及方法
- 一种基于位置姿态测量系统的机载合成孔径雷达运动参数测量方法
- 一种基于位置姿态测量系统的机载合成孔径雷达运动参数测量方法