一种行车自然环境检测云平台
文献发布时间:2023-06-19 19:27:02
技术领域
本发明涉及自然环境检测,具体涉及一种行车自然环境检测云平台。
背景技术
在高速公路场景中,能见度是影响行车安全的最重要的客观自然环境因素之一,雾天造成的低能见度有可能会导致严重的交通安全事故。因此,如何准确地检测道路能见度是亟待解决的问题。
通常情况下,可以使用专门的能见度测量仪器来获取能见度距离,但是这种方案不但预算成本高,而且实施成本也很高。为了降低成本,目前主要是从道路图像中通过预设算法获取能见度距离,其中,预设算法可以是基于暗通道计算透射率换算能见度距离的方法。这些算法中有些实施复杂度较高,而有些则容易受到噪声干扰,导致计算得到的能见度距离与实际情况存在较大误差,从而导致能见度检测不够准确。
此外,影响行车安全的客观自然环境因素还有很多,比如路面不平、道路积水和道路积雪等。积水路段会导致发动机进水而熄火,也可能因为少量积水而造成车辆侧滑,引起车辆失控。而道路上的积雪很难在寒冷的天气中融化,随着车轮的不断碾压容易将积雪压实,同样会引起车辆失控。如何准确地检测道路积水、积雪情况也是亟待解决的问题,对于保障行车安全具有重要意义。
发明内容
(一)解决的技术问题
针对现有技术所存在的上述缺点,本发明提供了一种行车自然环境检测云平台,能够有效克服现有技术所存在的对道路能见度、积水、积雪检测准确度较低的缺陷。
(二)技术方案
为实现以上目的,本发明通过以下技术方案予以实现:
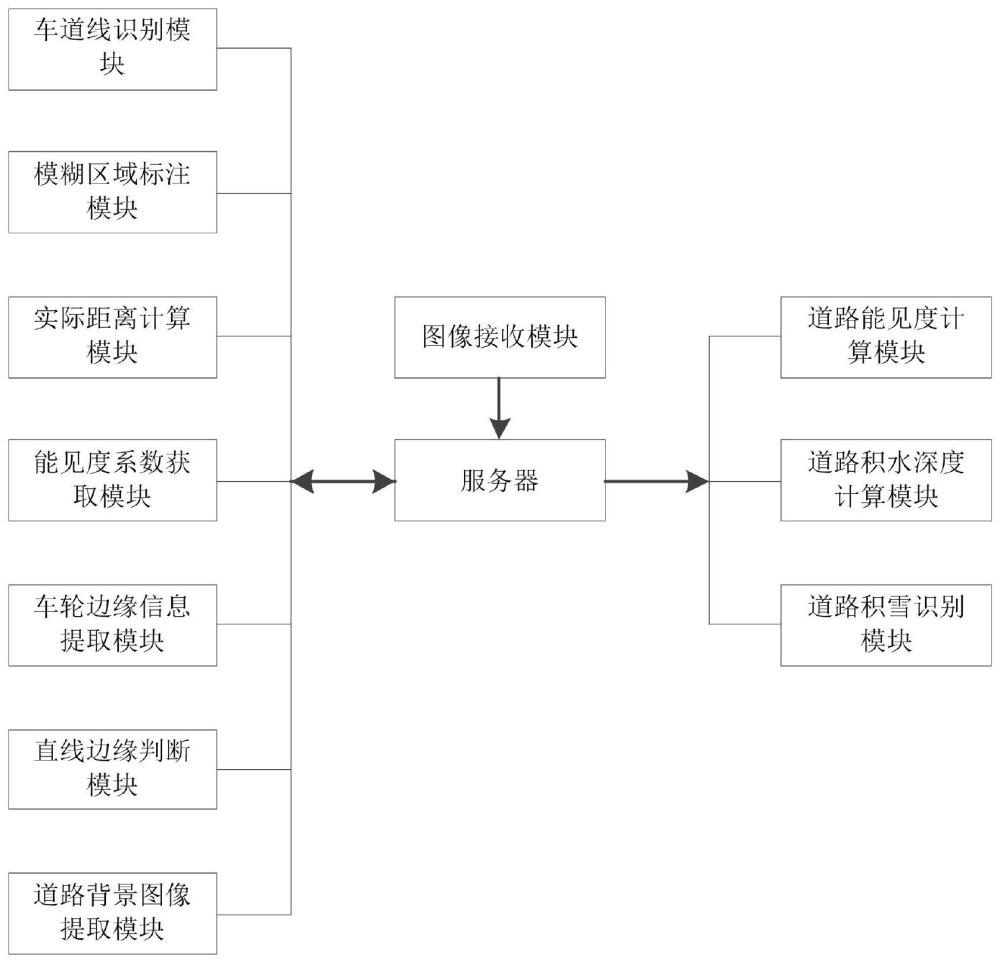
一种行车自然环境检测云平台,包括服务器,所述服务器通过图像接收模块接收行车自然环境检测终端发送的道路图像和车轮图像,所述服务器通过车道线识别模块对道路图像中的车道线进行识别,并利用模糊区域标注模块基于车道线识别结果对道路图像中的模糊区域进行标注,所述服务器通过实际距离计算模块基于车道线识别结果计算模糊区域的实际距离,并利用能见度系数获取模块对模糊区域进行深度轮廓特征分析,以获取模糊区域的能见度系数,所述服务器通过道路能见度计算模块基于车道线识别结果计算清晰区域的道路能见度,同时基于模糊区域的实际距离、能见度系数计算模糊区域的道路能见度;
所述服务器通过车轮边缘信息提取模块从车轮图像中提取车轮边缘信息,并利用直线边缘判断模块判断车轮边缘中是否存在直线边缘,所述服务器通过道路积水深度计算模块基于车轮边缘信息计算道路积水深度;
所述服务器通过道路背景图像提取模块从道路视频中提取道路背景图像,并将道路背景图像输入道路积雪识别模块,所述道路积雪识别模块利用训练好的道路积雪识别模型对道路背景图像进行道路积雪识别。
优选地,所述模糊区域标注模块基于车道线识别结果对道路图像中的模糊区域进行标注,包括:
基于道路图像中的车道线、车道线条数,对道路图像中两侧最远的车道线进行标注,并对与两侧最远的车道线相邻的下一条车道线进行预测与标注。
优选地,所述实际距离计算模块基于车道线识别结果计算模糊区域的实际距离,包括:
基于道路图像中的车道线,计算道路图像投影至仿射平面的仿射矩阵,并根据仿射矩阵计算模糊区域的实际距离。
优选地,所述车轮边缘信息提取模块从车轮图像中提取车轮边缘信息,包括:
在车轮图像中选取多个感兴趣区域,并提取所有感兴趣区域的图像特征;
基于感兴趣区域的图像特征与预设的车轮图像特征之间的相似度,获取车轮的感兴趣区域;
对车轮的感兴趣区域进行边缘提取,以从车轮图像中提取车轮边缘信息。
优选地,所述道路积水深度计算模块基于车轮边缘信息计算道路积水深度,包括:
若车轮边缘中不存在直线边缘,则道路积水深度为0,否则根据车轮边缘在没有道路积水时车轮图像中的像素坐标、预设车轮尺寸和直线边缘,计算道路积水深度。
优选地,所述根据车轮边缘在没有道路积水时车轮图像中的像素坐标、预设车轮尺寸和直线边缘,计算道路积水深度,包括:
根据车轮边缘在没有道路积水时车轮图像中的像素坐标,获取最大纵坐标对应的第一像素坐标,以及位于第一像素坐标正下方具有最小纵坐标的第二像素坐标;
获取第一像素坐标与第二像素坐标之间的第一像素块个数,根据预设车轮尺寸计算像素块尺寸,根据像素块尺寸和直线边缘计算道路积水深度。
优选地,所述根据像素块尺寸和直线边缘计算道路积水深度,包括:
沿着第一像素坐标至第二像素坐标的方向,获取第一像素坐标与直线边缘之间的第二像素块个数;
根据第二像素块个数、像素块尺寸和预设车轮尺寸计算道路积水深度。
优选地,所述道路背景图像提取模块从道路视频中提取道路背景图像,包括:
利用混合高斯背景建模从道路图像中提取道路背景图像,根据道路背景图像进行道路背景建模;
根据道路背景建模对道路视频进行视频分析,提取道路背景图像。
优选地,所述利用混合高斯背景建模从道路图像中提取道路背景图像,包括:
对道路图像中的像素值与高斯分布背景模型进行匹配,若像素值与高斯分布背景模型匹配成功,则该像素值属于背景,否则该像素值属于前景;
从道路图像中提取所有属于背景的像素值,得到道路背景图像。
优选地,所述根据道路背景建模对道路视频进行视频分析,提取道路背景图像,包括:
对道路视频进行解码,获取道路视频的时间戳,根据时间戳设置时间开关,确定是否利用混合高斯背景建模从道路图像中提取道路背景图像。
(三)有益效果
与现有技术相比,本发明所提供的一种行车自然环境检测云平台,具有以下有益效果:
1)车道线识别模块对道路图像中的车道线进行识别,模糊区域标注模块基于车道线识别结果对道路图像中的模糊区域进行标注,实际距离计算模块基于车道线识别结果计算模糊区域的实际距离,能见度系数获取模块对模糊区域进行深度轮廓特征分析,以获取模糊区域的能见度系数,一方面基于车道线识别结果计算清晰区域的道路能见度,另一方面基于模糊区域的实际距离、能见度系数计算模糊区域的道路能见度,从而能够实现对道路能见度地准确检测;
2)车轮边缘信息提取模块从车轮图像中提取车轮边缘信息,直线边缘判断模块判断车轮边缘中是否存在直线边缘,道路积水深度计算模块基于车轮边缘信息计算道路积水深度,通过判断车轮边缘中是否存在直线边缘能够对是否存在道路积水进行准确检测,同时基于车轮边缘信息能够对道路积水深度进行准确检测;
3)道路背景图像提取模块从道路视频中提取道路背景图像,将道路背景图像输入道路积雪识别模块,道路积雪识别模块利用训练好的道路积雪识别模型对道路背景图像进行道路积雪识别,通过从道路视频中提取道路背景图像,能够有效减少道路图像中行驶车辆等前景物体的干扰,有效提高对道路积雪检测的准确度。
附图说明
为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍。显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
图1为本发明的系统示意图;
图2为本发明中计算道路能见度的流程示意图。
具体实施方式
为使本发明实施例的目的、技术方案和优点更加清楚,下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述。显然,所描述的实施例是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
一种行车自然环境检测云平台,如图1和图2所示,包括服务器,服务器通过图像接收模块接收行车自然环境检测终端发送的道路图像和车轮图像,服务器通过车道线识别模块对道路图像中的车道线进行识别,并利用模糊区域标注模块基于车道线识别结果对道路图像中的模糊区域进行标注,服务器通过实际距离计算模块基于车道线识别结果计算模糊区域的实际距离,并利用能见度系数获取模块对模糊区域进行深度轮廓特征分析,以获取模糊区域的能见度系数,服务器通过道路能见度计算模块基于车道线识别结果计算清晰区域的道路能见度,同时基于模糊区域的实际距离、能见度系数计算模糊区域的道路能见度。
①模糊区域标注模块基于车道线识别结果对道路图像中的模糊区域进行标注,包括:
基于道路图像中的车道线、车道线条数,对道路图像中两侧最远的车道线进行标注,并对与两侧最远的车道线相邻的下一条车道线进行预测与标注。
②实际距离计算模块基于车道线识别结果计算模糊区域的实际距离,包括:
基于道路图像中的车道线,计算道路图像投影至仿射平面的仿射矩阵,并根据仿射矩阵计算模糊区域的实际距离。
上述技术方案,车道线识别模块对道路图像中的车道线进行识别,模糊区域标注模块基于车道线识别结果对道路图像中的模糊区域进行标注,实际距离计算模块基于车道线识别结果计算模糊区域的实际距离,能见度系数获取模块对模糊区域进行深度轮廓特征分析,以获取模糊区域的能见度系数,一方面基于车道线识别结果计算清晰区域的道路能见度,另一方面基于模糊区域的实际距离、能见度系数计算模糊区域的道路能见度,从而能够实现对道路能见度地准确检测。
如图1所示,服务器通过车轮边缘信息提取模块从车轮图像中提取车轮边缘信息,并利用直线边缘判断模块判断车轮边缘中是否存在直线边缘,服务器通过道路积水深度计算模块基于车轮边缘信息计算道路积水深度。
①车轮边缘信息提取模块从车轮图像中提取车轮边缘信息,包括:
在车轮图像中选取多个感兴趣区域,并提取所有感兴趣区域的图像特征;
基于感兴趣区域的图像特征与预设的车轮图像特征之间的相似度,获取车轮的感兴趣区域;
对车轮的感兴趣区域进行边缘提取,以从车轮图像中提取车轮边缘信息。
②道路积水深度计算模块基于车轮边缘信息计算道路积水深度,包括:
若车轮边缘中不存在直线边缘,则道路积水深度为0,否则根据车轮边缘在没有道路积水时车轮图像中的像素坐标、预设车轮尺寸和直线边缘,计算道路积水深度。
其中,根据车轮边缘在没有道路积水时车轮图像中的像素坐标、预设车轮尺寸和直线边缘,计算道路积水深度,包括:
根据车轮边缘在没有道路积水时车轮图像中的像素坐标,获取最大纵坐标对应的第一像素坐标,以及位于第一像素坐标正下方具有最小纵坐标的第二像素坐标;
获取第一像素坐标与第二像素坐标之间的第一像素块个数,根据预设车轮尺寸计算像素块尺寸,根据像素块尺寸和直线边缘计算道路积水深度。
其中,根据像素块尺寸和直线边缘计算道路积水深度,包括:
沿着第一像素坐标至第二像素坐标的方向,获取第一像素坐标与直线边缘之间的第二像素块个数;
根据第二像素块个数、像素块尺寸和预设车轮尺寸计算道路积水深度。
上述技术方案,车轮边缘信息提取模块从车轮图像中提取车轮边缘信息,直线边缘判断模块判断车轮边缘中是否存在直线边缘,道路积水深度计算模块基于车轮边缘信息计算道路积水深度,通过判断车轮边缘中是否存在直线边缘能够对是否存在道路积水进行准确检测,同时基于车轮边缘信息能够对道路积水深度进行准确检测。
如图1所示,服务器通过道路背景图像提取模块从道路视频(为安装在行驶车辆上的行车自然环境检测终端采集并发送的)中提取道路背景图像,并将道路背景图像输入道路积雪识别模块,道路积雪识别模块利用训练好的道路积雪识别模型对道路背景图像进行道路积雪识别。
道路背景图像提取模块从道路视频中提取道路背景图像,包括:
利用混合高斯背景建模从道路图像中提取道路背景图像,根据道路背景图像进行道路背景建模;
根据道路背景建模对道路视频进行视频分析,提取道路背景图像。
1)利用混合高斯背景建模从道路图像中提取道路背景图像,包括:
对道路图像中的像素值与高斯分布背景模型进行匹配,若像素值与高斯分布背景模型匹配成功,则该像素值属于背景,否则该像素值属于前景;
从道路图像中提取所有属于背景的像素值,得到道路背景图像。
2)根据道路背景建模对道路视频进行视频分析,提取道路背景图像,包括:
对道路视频进行解码,获取道路视频的时间戳,根据时间戳设置时间开关,确定是否利用混合高斯背景建模从道路图像中提取道路背景图像。
上述技术方案,道路背景图像提取模块从道路视频中提取道路背景图像,将道路背景图像输入道路积雪识别模块,道路积雪识别模块利用训练好的道路积雪识别模型对道路背景图像进行道路积雪识别,通过从道路视频中提取道路背景图像,能够有效减少道路图像中行驶车辆等前景物体的干扰,有效提高对道路积雪检测的准确度。
以上实施例仅用以说明本发明的技术方案,而非对其限制;尽管参照前述实施例对本发明进行了详细的说明,本领域的普通技术人员应当理解:其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分技术特征进行等同替换;而这些修改或者替换,并不会使相应技术方案的本质脱离本发明各实施例技术方案的精神和范围。
- 一种基于云平台的电动自行车充电管理系统
- 一种高精度多点位自然环境噪声实时检测装置及其检测方法
- 一种预判自然环境下混凝土长期耐久性能的无损检测方法