一种可移动式运输手术材料机器人
文献发布时间:2023-06-19 13:45:04
技术领域
本发明涉及医疗器械领域,具体的说是一种可移动式运输手术材料机器人。
背景技术
随着医疗技术不断进步,许多高值材料(如人工血管、瓣膜、球囊扩张器、导丝、人工关节、骨骼、心脏支架)等逐渐应用于临床,极大地促进医疗技术进步。目前绝大多数医院管理高值材料往往采取专人看管或配备物资储存仓库,当需要使用材料时,巡回护士需要申请、寻找、领取、记账等一系列繁琐程序。随着手术材料品种日益增多,专科护士缺乏等情况,时常在手术过程中出现临时使用材料准备不充分、巡护护士经验缺乏、反复寻找导致手术中止等问题,且人力成本高、效率低下严重制约着手术现代化、高效率发展。
发明内容
针对现有技术中的问题,本发明提供了一种可移动式运输手术材料机器人。
本发明解决其技术问题所采用的技术方案是:一种可移动式运输手术材料机器人,包括储料柜机构、物资摆放机构、升降送料机构、取料机构、传动机构,用于存储放置物资的所述物资摆放机构设置于所述储料柜机构上端的内部,用于对出料物资进行输送的所述升降送料机构安装于所述储料柜机构内部的前侧,用于驱动物资材料出料的所述取料机构安装于所述物资摆放机构上,并通过所述传动机构与所述升降送料机构传动连接。
进一步的,所述储料柜机构包括扫描手柄、音响、自主行走系统、双眼摄像头、物资存储箱、物资取出口、编辑界面、电源箱、电源开关、控制箱,所述物资存储箱、电源箱、控制箱由上往下依次固定连接,所述音响和所述双眼摄像头均固定安装于所述物资存储箱的顶端,所述扫描手柄固定安装于所述物资存储箱的一侧,所述物资取出口设置于所述物资存储箱前侧的下端,所述编辑界面安装于所述电源箱的前侧,所述电源箱通过所述电源开关与所述控制箱电连接,所述控制箱分别与所述扫描手柄、音响、自主行走系统、双眼摄像头、编辑界面电控连接。
进一步的,所述物资摆放机构包括多个置物板、多个螺旋置物架、多个端板、多个转轴、箱门,多个所述置物板由上往下均匀分布于所述物资存储箱的内部,且所述置物板的两侧均与所述物资存储箱侧面固定连接,多个所述螺旋置物架分别放置于多个所述置物板上,多个所述转轴分别固定安装于多个所述螺旋置物架的末端,多个所述端板分别固定安装于多个所述置物板末端的顶面,且多个所述转轴均活动安装于相应所述端板上,所述箱门设置于所述物资存储箱的背面,且所述箱门的一侧通过合页与所述物资存储箱活动连接,另一侧通过锁扣与所述物资存储箱锁接固定。
进一步的,所述升降送料机构包括电机、传动轴、第一锥齿轮、第二锥齿轮、轴承座、丝杆、升降座、缓冲板、缓冲弹簧、螺纹套,所述电机固定安装于所述物资存储箱内部的下端,所述传动轴传动安装于所述电机的一端,所述第一锥齿轮固定安装于所述传动轴的一端,所述丝杆通过所述轴承座活动安装于所述物资存储箱前壁的内侧面,所述第二锥齿轮固定安装于所述丝杆的底端,并与所述第一锥齿轮啮合传动连接,所述螺纹套螺纹安装于所述丝杆上,所述升降座安装于所述螺纹套上,且所述升降座的一侧滑动抵接于所述物资存储箱的内壁上,所述缓冲板滑动安装于所述升降座的顶面,所述缓冲弹簧安装于所述升降座与所述缓冲板之间。
进一步的,所述传动机构包括圆槽、多个限位插槽、插孔、限位插杆、气缸槽、气缸、柔性顶杆、弧形槽、多个顶推单元、第二限位板、第二限位弹簧、限位板滑槽;所述圆槽设于所述升降座内部,所述螺纹套活动安装于所述圆槽内,多个所述限位插槽沿所述螺纹套外圈的圆周方向均匀分布,所述插孔设于所述升降座内,且所述插孔的一端与所述圆槽连通,另一端设有所述限位板滑槽,所述限位插杆滑动插装于所述插孔内,且所述限位插杆的一端延伸插接到所述限位插槽内,另一端固定安装有位于所述限位板滑槽内的所述第二限位板,所述第二限位弹簧安装于所述限位板滑槽内,且所述第二限位弹簧的一端与所述第二限位板抵接,另一端与所述限位板滑槽的槽壁抵接;所述气缸槽设于所述升降座的前端,所述气缸滑动安装于所述气缸槽内,且所述气缸的一端延伸到所述升降座的外部,所述弧形槽设于所述气缸槽与所述限位板滑槽之间,所述柔性顶杆滑动安装于所述弧形槽内,且所述柔性顶杆的一端与所述气缸限位抵接,另一端与所述第二限位板限位抵接,多个所述顶推单元分别安装于多个所述置物板内。
进一步的,所述顶推单元包括推杆、推杆槽、顶块滑槽、第一顶块、第二顶块、顶杆、滚轮,所述推杆槽和所述顶块滑槽均设于所述置物板内,所述推杆滑动插接于所述推杆槽内,所述第一顶块和所述第二顶块均滑动安装于所述顶块滑槽内,且所述第一顶块的一端与所述推杆的一端抵接,所述第一顶块与所述第二顶块之间通过斜面相互抵接,所述顶杆固定安装于所述第二顶块的顶面,且所述顶杆的上端延伸到所述置物板的上方,所述滚轮活动安装于所述顶杆的底端。
进一步的,所述取料机构包括第三锥齿轮、第四锥齿轮、从动轴、多个第五锥齿轮、多个第六锥齿轮、多个花键、多个第一限位弹簧、多个第一限位板,所述第三锥齿轮固定安装于所述传动轴上,所述从动轴活动安装于所述置物板上,所述第四锥齿轮固定安装于所述从动轴的底端,并与所述第三锥齿轮啮合传动连接;多个所述第六锥齿轮分别固定安装于多个所述转轴的一端,多个所述第五锥齿轮通过多个所述花键滑动安装于所述从动轴上,且多个所述第五锥齿轮的底面分别抵接于相应的所述滚轮的顶端,多个所述第五锥齿轮的上方均设置有固定安装于所述从动轴上的第一限位板,且所述第一限位板与所述第五锥齿轮之间设置有活动套装于所述传动轴上的第一限位弹簧。
本发明的有益效果:
(1)本发明所述的一种移动式运输手术材料机器人,储料柜机构的使用可用于存放如人工血管、瓣膜、球囊扩张器、导丝、人工关节、骨骼、心脏支架等医疗物资,且配合其内设置的智能管理系统,可对医疗物资进行智能管理应用,使物资使用更加方便。
(2)本发明所述的一种移动式运输手术材料机器人,物资摆放机构的使用通过置物板和螺旋置物架配合对医疗物资进行摆放,不仅方便医疗物资的稳定摆放,同时还可在取料时通过螺旋置物架进行送料,使取料过程更加方便。
(3)本发明所述的一种移动式运输手术材料机器人,升降送料机构的使用可在取料时对相应的医疗物资进行输送,而无需医疗物资直接从螺旋置物架上下落进行送料取料,使取料时更加安全,防止人工血管、瓣膜、球囊扩张器、导丝、人工关节、骨骼、心脏支架等材料在取料时损坏。
(4)本发明所述的一种移动式运输手术材料机器人,传动机构和取料机构的使用可在升降送料机构上升到指定位置后将电机由驱动升降送料机构改为驱动相应的螺旋置物架工作,以进行取料,从而通过同一电机即可实现升降送料机构的升降驱动以及多层螺旋置物架的驱动取料,从而可减少驱动电机的数量,降低设备成本。
附图说明
下面结合附图和实施例对本发明进一步说明。
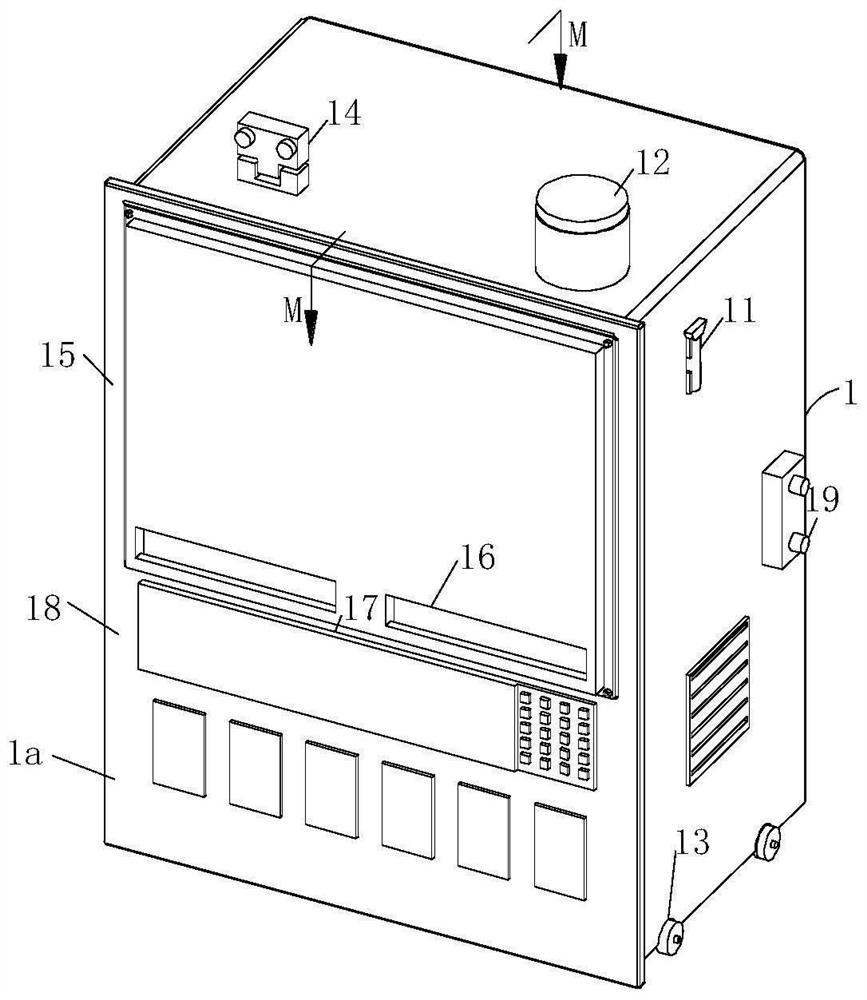
图1为本发明提供的一种可移动式运输手术材料机器人的一种较佳实施例整体结构示意图;
图2为图1的M-M方向的剖视图;
图3为图2的A处放大结构示意图;
图4为图2的B处放大结构示意图;
图5为图2的C处放大结构示意图;
图6为图2所示的螺旋置物架的结构示意图;
图7为图2所示的气缸与限位板的连接结构示意图;
图中:1、储料柜机构;11、扫描手柄;12、音响;13、自主行走系统;14、双眼摄像头;15、物资存储箱;16、物资取出口;17、编辑界面;18、电源箱;19、电源开关;1a、控制箱;2、物资摆放机构;21、置物板;22、螺旋置物架;23、端板;24、转轴;25、箱门;3、升降送料机构;31、电机;32、传动轴;33、第一锥齿轮;34、第二锥齿轮;35、轴承座;36、丝杆;37、升降座;38、缓冲板;39、缓冲弹簧;3a、螺纹套;4、取料机构;41、第三锥齿轮;42、第四锥齿轮;43、从动轴;44、第五锥齿轮;45、第六锥齿轮;46、花键;47、第一限位弹簧;48、第一限位板;5、传动机构;51、圆槽;52、限位插槽;53、插孔;54、限位插杆;55、气缸槽;56、气缸;57、柔性顶杆;58、弧形槽;59、顶推单元;591、推杆;592、推杆槽;593、顶块滑槽;594、第一顶块;595、第二顶块;596、顶杆;597、滚轮;5a、第二限位板;5b、第二限位弹簧;5c、限位板滑槽。
具体实施方式
为了使本发明实现的技术手段、创作特征、达成目的与功效易于明白了解,下面结合具体实施方式,进一步阐述本发明。
如图1-图7所示,本发明所述的一种可移动式运输手术材料机器人,包括储料柜机构1、物资摆放机构2、升降送料机构3、取料机构4、传动机构5,用于存储放置物资的所述物资摆放机构2设置于所述储料柜机构1上端的内部,用于对出料物资进行输送的所述升降送料机构3安装于所述储料柜机构1内部的前侧,用于驱动物资材料出料的所述取料机构4安装于所述物资摆放机构2上,并通过所述传动机构5与所述升降送料机构3传动连接;储料柜机构1的使用可用于存放如人工血管、瓣膜、球囊扩张器、导丝、人工关节、骨骼、心脏支架等医疗物资,且配合其内设置的智能管理系统,可对医疗物资进行智能管理应用,使物资使用更加方便;物资摆放机构2的使用通过置物板21和螺旋置物架22配合对医疗物资进行摆放,不仅方便医疗物资的稳定摆放,同时还可在取料时通过螺旋置物架22进行送料,使取料过程更加方便;升降送料机构3的使用可在取料时对相应的医疗物资进行升降输送,而无需医疗物资直接从螺旋置物架22上下落进行送料取料,使取料时更加安全,防止人工血管、瓣膜、球囊扩张器、导丝、人工关节、骨骼、心脏支架等高值材料在取料时损坏;传动机构5和取料机构4的使用可在升降送料机构3上升到指定位置后将电机31由驱动升降送料机构3改为驱动相应的螺旋置物架22工作,以进行取料,从而通过同一电机31即可实现升降送料机构3的升降驱动以及多层螺旋置物架22的驱动取料,从而可减少驱动电机的数量,降低设备成本。
具体的,所述储料柜机构1包括扫描手柄11、音响12、自主行走系统13、双眼摄像头14、物资存储箱15、物资取出口16、编辑界面17、电源箱18、电源开关19、控制箱1a,所述物资存储箱15、电源箱18、控制箱1a由上往下依次固定连接,所述音响12和所述双眼摄像头14均固定安装于所述物资存储箱15的顶端,所述扫描手柄11固定安装于所述物资存储箱15的一侧,所述物资取出口16设置于所述物资存储箱15前侧的下端,所述编辑界面17安装于所述电源箱18的前侧,所述电源箱18通过所述电源开关19与所述控制箱1a电连接,所述控制箱1a分别与所述扫描手柄11、音响12、自主行走系统13、双眼摄像头14、编辑界面17电控连接;其中,所述控制箱1a内设置有语音系统、指纹识别系统、导航系统、摄像系统、音乐系统以及控制系统,当电源开关19开启后可以打开编辑界面17,所述编辑界面17包含取用、添加、退还、音乐、记账等功能按钮,从而对物资存储箱15内保存的医疗物资进行智能化管理;摄像系统主要配备扫描手柄11可以识别患者腕带二维码,及时登记患者基本信息,同时可以通过双眼摄像头14拍摄取材人员面部特征;语音系统用于识别主刀医生或巡回护士发出的所需材料名称及数量命令后自动记账,做到专用耗材专人取用及保管;当所取材料未使用可以点击编辑界面17退还按钮放置原位并退账;指纹识别系统用于备用,当语音识别不清晰时可改用指纹识别提取材料;音乐系统供临床医生必要时使用;控制系统的数据终端能够与手术支持中心对接,当物资存储箱15出现材料短缺(定义只有一件)时能够及时提醒支持中心工作人员添加材料,避免了因人力传送物资不及时而影响手术进程现象;导航系统可配合自主行走系统13为该装置进行移动导航,在加料时引导该装置和医疗人员在仓库内寻到所需的物资。
具体的,所述物资摆放机构2包括多个置物板21、多个螺旋置物架22、多个端板23、多个转轴24、箱门25,多个所述置物板21由上往下均匀分布于所述物资存储箱15的内部,且所述置物板21的两侧均与所述物资存储箱15侧面固定连接,多个所述螺旋置物架22分别放置于多个所述置物板21上,多个所述转轴24分别固定安装于多个所述螺旋置物架22的末端,多个所述端板23分别固定安装于多个所述置物板21末端的顶面,且多个所述转轴24均活动安装于相应所述端板23上,所述箱门25设置于所述物资存储箱15的背面,且所述箱门25的一侧通过合页与所述物资存储箱15活动连接,另一侧通过锁扣与所述物资存储箱15锁接固定;当加料时,可打开所述箱门25,将相应的医疗物资分层分别摆放于所述螺旋置物架22上,且摆放时,医疗物资由右往左依次放置于所述螺旋置物架22的螺旋槽内。
具体的,所述升降送料机构3包括电机31、传动轴32、第一锥齿轮33、第二锥齿轮34、轴承座35、丝杆36、升降座37、缓冲板38、缓冲弹簧39、螺纹套3a,所述电机31固定安装于所述物资存储箱15内部的下端,所述传动轴32传动安装于所述电机31的一端,所述第一锥齿轮33固定安装于所述传动轴32的一端,所述丝杆36通过所述轴承座35活动安装于所述物资存储箱15前壁的内侧面,所述第二锥齿轮34固定安装于所述丝杆36的底端,并与所述第一锥齿轮33啮合传动连接,所述螺纹套3a螺纹安装于所述丝杆36上,所述升降座37安装于所述螺纹套3a上,且所述升降座37的一侧滑动抵接于所述物资存储箱15的内壁上,所述缓冲板38滑动安装于所述升降座37的顶面,所述缓冲弹簧39安装于所述升降座37与所述缓冲板38之间;所述升降座37初始处于所述物资取出口16内侧面的下端,当需要取料时,开启电机31,驱动传动轴32及第一锥齿轮33旋转,所述第一锥齿轮33驱动所述第二锥齿轮34旋转,进而带动所述丝杆36旋转,从而通过螺纹传动驱动所述螺纹套3a及所述升降座37沿所述丝杆36上行,直至所述升降座37到达放置需取用的物资所在的置物板21的一侧。
具体的,所述传动机构5包括圆槽51、多个限位插槽52、插孔53、限位插杆54、气缸槽55、气缸56、柔性顶杆57、弧形槽58、多个顶推单元59、第二限位板5a、第二限位弹簧5b、限位板滑槽5c;所述圆槽51设于所述升降座37内部,所述螺纹套3a活动安装于所述圆槽51内,多个所述限位插槽52沿所述螺纹套3a外圈的圆周方向均匀分布,所述插孔53设于所述升降座37内,且所述插孔53的一端与所述圆槽51连通,另一端设有所述限位板滑槽5c,所述限位插杆54滑动插装于所述插孔53内,且所述限位插杆54的一端延伸插接到所述限位插槽52内,另一端固定安装有位于所述限位板滑槽5c内的所述第二限位板5a,所述第二限位弹簧5b安装于所述限位板滑槽5c内,且所述第二限位弹簧5b的一端与所述第二限位板5a抵接,另一端与所述限位板滑槽5c的槽壁抵接;所述气缸槽55设于所述升降座37的前端,所述气缸56滑动安装于所述气缸槽55内,且所述气缸56的一端延伸到所述升降座37的外部,所述弧形槽58设于所述气缸槽55与所述限位板滑槽5c之间,所述柔性顶杆57滑动安装于所述弧形槽58内,且所述柔性顶杆57的一端与所述气缸56限位抵接,另一端与所述第二限位板5a限位抵接,多个所述顶推单元59分别安装于多个所述置物板21内;当所述升降座37抵达相应置物板21一侧时,所述气缸56的一端与所述顶推单元59抵接,之后驱动所述气缸56伸长,使其对所述顶推单元59进行顶推挤压,当所述顶推单元59被挤压到位后,随着所述气缸56的持续伸长,所述气缸56在所述气缸槽55内向左移滑动,从而将所述柔性顶杆57的上端向左挤压移动,进而使所述柔性顶杆57的下端向右移动,将所述第二限位板5a向右挤压移动,从而带动所述限位插杆54向右移动,使所述限位插杆54的左侧端从所述限位插槽52内脱离,不再将所述螺纹套3a限位固定,此时,当所述丝杆36旋转时,带动所述螺纹套3a同步旋转,使得所述螺纹套3a和升降座37不再上移。
具体的,所述顶推单元59包括推杆591、推杆槽592、顶块滑槽593、第一顶块594、第二顶块595、顶杆596、滚轮597,所述推杆槽592和所述顶块滑槽593均设于所述置物板21内,所述推杆591滑动插接于所述推杆槽592内,所述第一顶块594和所述第二顶块595均滑动安装于所述顶块滑槽593内,且所述第一顶块594的一端与所述推杆591的一端抵接,所述第一顶块594与所述第二顶块595之间通过斜面相互抵接,所述顶杆596固定安装于所述第二顶块595的顶面,且所述顶杆596的上端延伸到所述置物板21的上方,所述滚轮597活动安装于所述顶杆596的底端;当所述气缸56伸长时,其将所述推杆591向右推动,进而带动所述第一顶块594向右移动,所述第一顶块594向右移动过程中通过斜面将所述第二顶块595向上挤压移动,进而带动所述顶杆596和滚轮597向上移动。
具体的,所述取料机构4包括第三锥齿轮41、第四锥齿轮42、从动轴43、多个第五锥齿轮44、多个第六锥齿轮45、多个花键46、多个第一限位弹簧47、多个第一限位板48,所述第三锥齿轮41固定安装于所述传动轴32上,所述从动轴43活动安装于所述置物板21上,所述第四锥齿轮42固定安装于所述从动轴43的底端,并与所述第三锥齿轮41啮合传动连接;多个所述第六锥齿轮45分别固定安装于多个所述转轴24的一端,多个所述第五锥齿轮44通过多个所述花键46滑动安装于所述从动轴43上,且多个所述第五锥齿轮44的底面分别抵接于相应的所述滚轮597的顶端,多个所述第五锥齿轮44的上方均设置有固定安装于所述从动轴43上的第一限位板48,且所述第一限位板48与所述第五锥齿轮44之间设置有活动套装于所述从动轴43上的第一限位弹簧47;所述第五锥齿轮44初始在所述第一限位弹簧47的复位弹力作用下下行与所述第六锥齿轮45脱离,因而当所述从动轴43旋转时,不会驱动所述第六锥齿轮45及转轴24旋转,当某一层置物板21内的顶杆596和滚轮597向上移动时,通过所述滚轮597将相应的所述第五锥齿轮44向上顶起,直至所述第五锥齿轮44与所述第六锥齿轮45啮合传动,之后再开启所述电机31,驱动所述传动轴32及第三锥齿轮41旋转,所述第三锥齿轮41驱动所述第四锥齿轮42旋转,进而带动所述从动轴43及第五锥齿轮44旋转,所述第五锥齿轮44驱动啮合的所述第六锥齿轮45旋转,进而带动所述转轴24和所述螺旋置物架22旋转,所述螺旋置物架22在旋转过程中将其上放置的医疗物资逐渐向外推送移动,直至物资掉落到所述缓冲板38上,完成初步取料,之后关闭所述电机31;再驱动所述气缸56收缩,使其两端不再对顶推单元59和柔性顶杆57进行顶推,此时,所述第五锥齿轮44在所述第一限位弹簧47的复位弹力作用下下行复位,使得所述第五锥齿轮44与所述第六锥齿轮45分离不再传动,同时,所述第二限位板5a和所述限位插杆54在所述第二限位弹簧5b的复位弹力作用下向左移动复位,使得所述限位插杆54的左端再次插入所述限位插槽52内,将所述螺纹套3a销接固定,之后再反向驱动所述电机31旋转,进而带动所述丝杆36反向旋转,从而通过螺纹传动驱动所述螺纹套3a及所述升降座37沿所述丝杆36下行复位,直至所述升降座37移动到所述物资取出口16的内侧面,医护人员即可伸手取出缓冲板38上的医疗物资,完成取料过程。
本发明使用过程中,当需要取用医疗物资时,开启电机31,驱动传动轴32及第一锥齿轮33旋转,第一锥齿轮33驱动第二锥齿轮34旋转,进而带动丝杆36旋转,从而通过螺纹传动驱动螺纹套3a及升降座37沿丝杆36上行,直至升降座37到达放置需取用的物资所在的置物板21的一侧,使气缸56的一端与相应的顶推单元59抵接,之后关闭电机31驱动气缸56伸长,使气缸56对顶推单元59进行顶推挤压,当顶推单元59被挤压到位后,随着气缸56的持续伸长,气缸56在气缸槽55内向左移滑动,从而将柔性顶杆57的上端向左挤压移动,进而使柔性顶杆57的下端向右移动,将第二限位板5a向右挤压移动,从而带动限位插杆54向右移动,使限位插杆54的左侧端从限位插槽52内脱离,不再将螺纹套3a限位固定,且顶推单元59受压顶推时,推杆591向右推动,进而带动第一顶块594向右移动,第一顶块594向右移动过程中通过斜面将第二顶块595向上挤压移动,进而带动顶杆596和滚轮597向上移动,通过滚轮597将相应的第五锥齿轮44向上顶起,直至第五锥齿轮44与第六锥齿轮45啮合传动,之后再开启电机31,驱动传动轴32及第三锥齿轮41旋转,而此时丝杆36旋转并带动螺纹套3a同步旋转,使得螺纹套3a和升降座37不再上移,而第三锥齿轮41驱动第四锥齿轮42旋转,进而带动从动轴43及第五锥齿轮44旋转,第五锥齿轮44驱动啮合的第六锥齿轮45旋转,进而带动转轴24和螺旋置物架22旋转,螺旋置物架22在旋转过程中将其上放置的医疗物资逐渐向外推送移动,直至物资掉落到缓冲板38上,完成初步取料,之后关闭电机31,再驱动气缸56收缩,使其两端不再对顶推单元59和柔性顶杆57进行顶推,此时,第五锥齿轮44在第一限位弹簧47的复位弹力作用下下行复位,使得第五锥齿轮44与第六锥齿轮45分离不再传动,同时,第二限位板5a和限位插杆54在第二限位弹簧5b的复位弹力作用下向左移动复位,使得限位插杆54的左端再次插入限位插槽52内,将螺纹套3a销接固定,之后再反向驱动电机31旋转,进而带动丝杆36反向旋转,从而通过螺纹传动驱动螺纹套3a及升降座37沿丝杆36下行复位,直至升降座37移动到物资取出口16的内侧面,医护人员即可伸手取出缓冲板38上的医疗物资,完成取料过程。
以上显示和描述了本发明的基本原理、主要特征和优点。本行业的技术人员应该了解,本发明不受上述实施例的限制,上述实施方式和说明书中的描述的只是说明本发明的原理,在不脱离本发明精神和范围的前提下,本发明还会有各种变化和改进,这些变化和改进都落入本发明要求保护的范围内。本发明要求保护范围由所附的权利要求书及其等效物界定。