手持融合望远镜以及图像融合方法
文献发布时间:2023-06-19 18:34:06
技术领域
本发明涉及光电一体化技术,尤其是指一种具有目标定位功能的手持融合望远镜以及图像融合方法。
背景技术
传统的户外观察设备多偏向于光学结构设计,因此存在使用环境受限的缺点,例如低照度、雨雾等天气无法正常观察,因此急需红外和微光类观察设备辅助夜间观察,而单一的红外设备在雨雪天气,目标温差与环境温差较小时,目标识别不明显,且无法准确识别目标轮廓,单一的微光设备在观察伪装类目标时,效果较差,因此需要将二者优势相结合,通过融合算法,突出目标特征,使设备具有更好的观察效果。
应用微光和红外融合技术的望远镜很好的解决了观察的局限性,但用户在实际使用时,仅仅能观察还不能达到观察的目的,提出了观和测相结合的需求,同时要求体积和重量均较小。增加测距、定位、定向以及目标定位功能,将会对产品是一个完善的补充,大大提高了户外易用,同时携带此集多种功能于一身的融合设备,将会省去多个单一功能的装备。
发明内容
为解决上述技术问题,本发明提供一种具有目标定位功能的手持融合望远镜,望远镜主体的外壳是采用前壳体、后壳体组装,望远镜中执行模块包括热像机芯加通信控制模组、微光模块、定位模块,电子罗盘,激光测距模块、电源管理模块、存储模块、显示模块、输出端口、按键手轮、接近开关、输出端口;所述热像机芯加通信控制模组中包含有机芯组件、非制冷红外探测器镜头及其对应探测器、图像融合板、通信控制板,其中的机芯组件内置有融合算法,同时非制冷红外探测器镜头及其对应探测器、图像融合板、通信控制板均通过针脚连线与机芯组件之间通讯相连,同时图像融合板分别通过总线与存储模块、显示模块、输出端口之间数据相连,而通信控制板分别通过总线与定位模块,电子罗盘,激光测距模块之间信息相连;所述的按键手轮与机芯组件的控制输入针脚之间连接,且按键手轮可长按或短按状态被机芯组件识别读取;所述的接近开关设于后壳体的望远镜用于双目观察显示模块一侧,且接近开关与与机芯组件的供能输入针脚之间连接,同时电源管理模块也与机芯组件之间供能连接。
在本发明的一个实施例中,所述的微光模块包括低照度探测器及其对应的非制冷红外变焦镜头,通过数字接口总线将微光数据传到机芯组件中的热像机芯内部处理器FPGA,实现红外观察图像的调焦,满足设备在低照度条件下的观察,另外处理融合算法嵌入到热像机芯FPGA中,通过融合IP核将红外图像和微光图像进行融合,最后通过数字接口输出到双目的显示模块上,其中存储模块和FPGA实时数据交互,可以实时拍照和录像,并可回放显示。
在本发明的一个实施例中,所述的电源管理模块还内置有4节18650锂电池卡槽,可以在-40℃至55℃为设备提供稳定的电力,并确保设备在常温下可以连续工作8小时以上,同时卡槽且具备电池正反接保护的功能,可实现复杂条件下迅速填装电池,提高设备的快速响应能力。
在本发明的一个实施例中,所述的显示模块由OLED驱动板、OLED显示屏和目镜组成的双目OLED显示系统,其中的OLED驱动板与图像融合板的输出端之间连接,显示模块可将前端探测器所成图像并叠加时间、定位、测距、分划等字符信息通过OLED显示,并使用目镜组件放大,方便用户观察。
在本发明的一个实施例中,所述的机芯组件通过通讯针脚还接有滚轮,同时滚轮集成带动电气元件旋转编码器,实现观察图像红外、微光、多模式融合的模式切换。
在本发明的一个实施例中,所述的存储模块可通过输出端口与计算机之间数据传输相连,存储模块主要指用于存储设备观察过程重拍照和录像时的景象,可以通过设备直接查看存储内容或USB连接设备与计算机进行查看。
同时本发明申请还提供一种基于手持融合望远镜的图像融合方法,根据手持融合望远镜硬件搭建设计,其中图像融合是指红外和微光的图像融合,融合算法采用以IP核方式植入到热像机芯,并针对不同环境目标,进行近自然感色彩传递,实现了多种场景色彩的选择性,包括如下步骤:
步骤S1:装载电池,启动打开电源,进入系统自检,自检完成后进入观察界面;
步骤S2:合理调节目镜和物镜,将目镜中分划中心对准目标,且确认设备自身定位和罗盘信息正常后,短按设备测距键,测量设备与目标之间的相对距离,使观察目标清晰成像;
步骤S3:可以根据实际的使用场景,选择合适的观察模式;
步骤S4:望远镜使用配套线缆连接监视器,输出视频,同步观察;
步骤S5:使用结束时,关闭电源,取出电池即可。
在本发明的一个实施例中,所述的融合算法将红外视频图像和微光视频图像对同一目标实时采集的信息进行处理,将2个场景的图像信息融合到1张图像上
在本发明的一个实施例中,所述融合算法采用多分辨分析算法,可以在不同的尺度选用不同的融合规则,更能突出信息对比度,所述融合算法使用即时色彩传递,对目标图像进行伪彩色添加,使得融合后的图像自然感更强。
本发明的上述技术方案相比现有技术具有以下优点:本发明所述的手持融合望远镜,其中使用非制冷红外探测器和可调焦的红外光学镜头作为设备红外图像的成像器件,使用低照度探测器和定焦镜头作为设备微光成像器件,通过融合算法,可以选用不同的融合规则,将红外和微光的图像进行多尺度融合,使得融合后的图像更能突出目标信息对比度,并且可以同时提供空域和频域局部化的信息,使人眼更容易发现敏感目标;并根据不同场景采用不用融合模式,同时应用自然感彩色化显示方式,降低人眼长时间观察的疲劳感。
附图说明
为了使本发明的内容更容易被清楚的理解,下面根据本发明的具体实施例并结合附图,对本发明作进一步详细的说明。
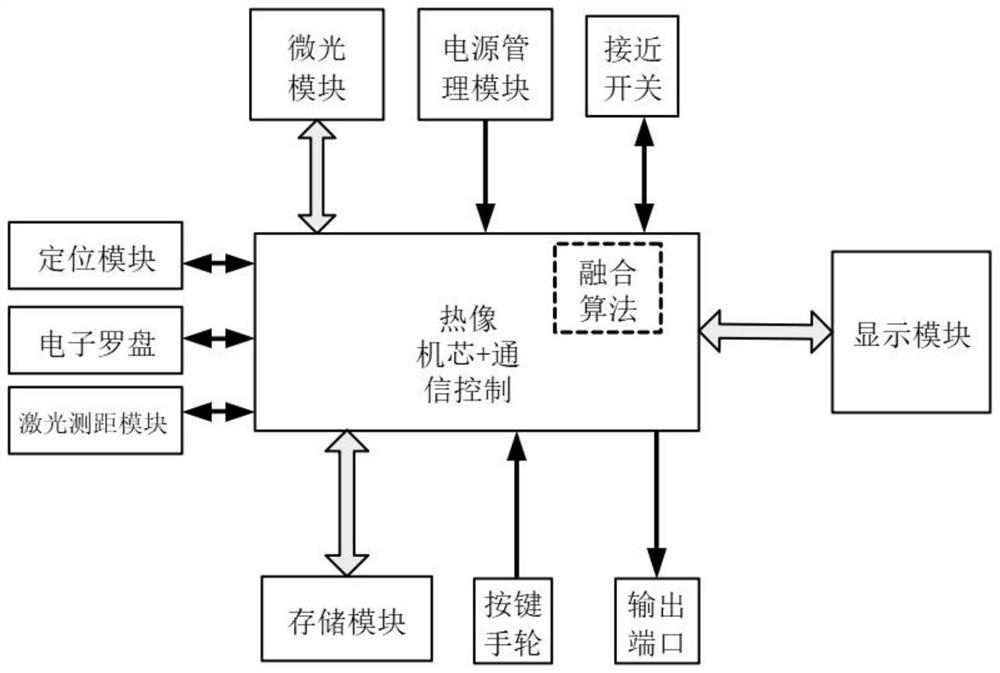
图1是本发明具有目标定位功能的手持融合望远镜的电气原理框图;
图2是本发明所述显示模块中显示主界面示意图;
图3是本发明所述融合算法的处理流程图。
具体实施方式
如图1所示,本实施例提供一种具有目标定位功能的手持融合望远镜,望远镜主体的外壳是采用前壳体、后壳体组装,望远镜中执行模块包括热像机芯加通信控制模组、微光模块、定位模块,电子罗盘,激光测距模块、电源管理模块、存储模块、显示模块、输出端口、按键手轮、接近开关、输出端口;所述热像机芯加通信控制模组中包含有机芯组件、非制冷红外探测器镜头及其对应探测器、图像融合板、通信控制板,其中的机芯组件内置有融合算法,同时非制冷红外探测器镜头及其对应探测器、图像融合板、通信控制板均通过针脚连线与机芯组件之间通讯相连,同时图像融合板分别通过总线与存储模块、显示模块、输出端口之间数据相连,而通信控制板分别通过总线与定位模块,电子罗盘,激光测距模块之间信息相连;所述的按键手轮与机芯组件的控制输入针脚之间连接,且按键手轮可长按或短按状态被机芯组件识别读取;所述的接近开关设于后壳体的望远镜用于双目观察显示模块一侧,且接近开关与与机芯组件的供能输入针脚之间连接,同时电源管理模块也与机芯组件之间供能连接。
其中的接近开关安装在后壳体上,靠近双目OLED处,用于检测是否有人靠近设备,以此实现设备防漏光功能,提高设备的隐蔽性。
定位模块可以将自身的定位信息发送给通信控制板,并将定位信息通过显示模块显示在OLED上,方便观察者确定自身坐标,并支持大地坐标和高斯坐标切换;电子罗盘采用国产电子式磁罗盘,因其具有较高的精度和较好的灵敏度,可以帮助设备实现目标相对位置较为准确的测算;测距模块使用人眼安全波段,具有自动连续测距、首末测距、高准测率的功能。
另外地,按键手轮分为用于测距和拍录的两个按键,其中短按为一个模式,长按对应另外一种模式,手轮主要用于模式的切换和功能菜单的确认,其中模式包括微光、热成像、融合黑白及融合彩色(含丛林、城市、海洋、荒漠、雪地)等模式,功能菜单包括屏幕亮度、对比度、放大、回放的功能选项。
所述的微光模块包括低照度探测器及其对应的非制冷红外变焦镜头,通过数字接口总线将微光数据传到机芯组件中的热像机芯内部处理器FPGA,实现红外观察图像的调焦,满足设备在低照度条件下的观察,另外处理融合算法嵌入到热像机芯FPGA中,通过融合IP核将红外图像和微光图像进行融合,最后通过数字接口输出到双目的显示模块上,其中存储模块和FPGA实时数据交互,可以实时拍照和录像,并可回放显示。
所述的电源管理模块还内置有4节18650锂电池卡槽,可以在-40℃至55℃为设备提供稳定的电力,并确保设备在常温下可以连续工作8小时以上,同时卡槽且具备电池正反接保护的功能,可实现复杂条件下迅速填装电池,提高设备的快速响应能力。
具体地,使用18650锂电池做设备的电源,具有较高的能量密度和稳定性,且可以重复充放电达2000次以上,具有良好的高低温性能,同时增加低电压报警功能,提醒用户及时充电,可以有效的延长电池使用寿命。
所述的显示模块由OLED驱动板、OLED显示屏和目镜组成的双目OLED显示系统,其中的OLED驱动板与图像融合板的输出端之间连接,显示模块可将前端探测器所成图像并叠加时间、定位、测距、分划等字符信息通过OLED显示,并使用目镜组件放大,方便用户观察。
具体地,显示显示屏中界面主要包含模式信息、放大倍数、电池电量、时间、测距信息、位置信息、目标定位信息和菜单选择等,其中模式信息指当前观察模式,如附图2,为单一红外模式,即只用红外探测器观察目标,可使用手轮进行模式切换;图中的定位信息即为设备当前所在地的坐标信息。
具体地,使用双目微显示OLED器件配合目镜辅助使用者观察,在保证图像质量的同时,可以做到长时间观察眼睛不会出现不适的情况,配合接近开关,帮助检测设备是否在观察状态,以此控制是否做熄屏控制,使得设备在夜间具有更好的隐蔽性,使用人员有更高的安全性,便于使用人员在户外观察或录像摄像。
所述的机芯组件通过通讯针脚还接有滚轮,同时滚轮集成带动电气元件旋转编码器,实现观察图像红外、微光、多模式融合的模式切换。
所述的存储模块可通过输出端口与计算机之间数据传输相连,存储模块主要指用于存储设备观察过程重拍照和录像时的景象,可以通过设备直接查看存储内容或USB连接设备与计算机进行查看。
另外地,输出端口主要用于产品的对外通信,包括用于连接电脑的USB通信、用于连接显示器的模拟视频输出,用于设备在线升级更新的串口通信。
同时本发明申请还提供一种基于手持融合望远镜的图像融合方法,根据手持融合望远镜硬件搭建设计,其中图像融合是指红外和微光的图像融合,融合算法采用以IP核方式植入到热像机芯,并针对不同环境目标,进行近自然感色彩传递,实现了多种场景色彩的选择性,如图3所示,包括如下步骤:
步骤S1:装载电池,启动打开电源,进入系统自检,自检完成后进入观察界面;
步骤S2:合理调节目镜和物镜,将目镜中分划中心对准目标,且确认设备自身定位和罗盘信息正常后,短按设备测距键,测量设备与目标之间的相对距离,使观察目标清晰成像;
步骤S3:可以根据实际的使用场景,选择合适的观察模式;
步骤S4:望远镜使用配套线缆连接监视器,输出视频,同步观察;
步骤S5:使用结束时,关闭电源,取出电池即可。
在本发明的一个实施例中,所述的融合算法将红外视频图像和微光视频图像对同一目标实时采集的信息进行处理,将2个场景的图像信息融合到1张图像上
在本发明的一个实施例中,所述融合算法采用多分辨分析算法,可以在不同的尺度选用不同的融合规则,更能突出信息对比度,所述融合算法使用即时色彩传递,对目标图像进行伪彩色添加,使得融合后的图像自然感更强。
图像融合方法中也根据自身的定位信息,测距距离,电子罗盘的方位、俯仰角根据三角函数计算出目标的坐标信息,主要包括经纬度和高程;其中主要使用激光器、电子罗盘、定位模块实现自身定位和目标距离测量、目标相对位置的测算,其中激光器为人眼安全波段,准测率大于98%,可以实现自动测距和首末目标测距等功能,电子罗盘为高精度电子式磁罗盘,测角误差小于0.5°,定位模块的定位误差小于10米,可以辅助设备实现精准定位,通过以上模块,经公式解算,可以得到目标相对位置信息,并具有较高的精度。
显然,上述实施例仅仅是为清楚地说明所作的举例,并非对实施方式的限定。对于所属领域的普通技术人员来说,在上述说明的基础上还可以做出其它不同形式变化或变动。这里无需也无法对所有的实施方式予以穷举。而由此所引申出的显而易见的变化或变动仍处于本发明创造的保护范围之中。
- 一种具有图像融合功能的昼夜合一望远镜
- 图像融合方法、基于图像融合方法的白线检测方法及系统