一种电力传输用电缆桥架除冰机器人
文献发布时间:2023-06-19 09:40:06
技术领域
本发明涉及电缆桥架领域,具体为一种电力传输用电缆桥架除冰机器人。
背景技术
冬天气温低天气寒冷,虽然有集体供暖,但很多单位和家庭也会使用空调、电热水器等,这些都会增加冬天电能消耗,电缆线的负荷增加,需要注意定期检修桥架。电缆桥架的主要作用是保护、支撑和敷设电缆线,保证电缆线正常传输电能。用电加大会导致桥架出现散热不均匀等故障,这些都会影响电缆线的正常传输电能,给人们冬季用电带来阻碍。降雪天气后,相关部门会及时检修露天环境中使用的桥架,及时清除上面的冰,以此来保证桥架正常使用。普通除冰都是由人共完成,耗时耗力,工作效率还低。
发明内容
针对上述技术问题,本发明设计了一种自动清除电缆桥架上的冰的机器人,由三个部分组成,行走机构、铲冰机构和凿冰机构,可以在寒冷天气代替人工除冰。
一种电力传输用电缆桥架除冰机器人,包括:行走机构、铲冰机构、凿冰机构。
所述的行走机构包括:电机、电机轴固定板、架子、行走锥齿轮一、电机轴、行走锥齿轮二、主运动杆、行走锥齿轮三、行走锥齿轮四、行走转动杆、行走连杆、行走弹簧、行走贴板、车轮。
所述的铲冰机构包括:蜗杆、蜗轮、蜗轮连接杆、铲冰固定座一、异形凸轮、滑动块、铲冰支撑架、铲冰固定座二、滑动摩擦轮、摆动杆、铲子连接杆、铲子、弹簧、固定圆杆。
所述的凿冰机构包括:凿冰锥齿轮一、凿冰锥齿轮二、凿冰主转动杆、转动杆固定座、凿冰斜齿轮一、凿冰次转动杆、凿冰斜齿轮二、圆轮、圆柱、固定底板、锤子固定座一、锤子转动杆、锤子、锤子固定座二。
所述的电机固定安装在架子上,电机轴固定板固定安装在架子上,行走锥齿轮一固定安装在电机轴上,电机轴固定安装在电机上,行走锥齿轮二固定安装在主运动杆上,行走锥齿轮二与行走锥齿轮一形成齿轮配合,所述的主运动杆转动安装在架子上,行走锥齿轮三固定安装在主运动杆上,行走锥齿轮四固定安装在行走转动杆上,行走转动杆转动安装在架子上,所述的行走锥齿轮三与行走锥齿轮四形成齿轮配合,行走连杆固定安装在行走转动杆上,行走弹簧固定安装在行走连杆上,行走贴板固定安装在行走连杆上,车轮转动安装在架子上。
蜗杆固定安装在主运动杆上,蜗轮固定安装在蜗轮连接杆上,蜗轮连接杆转动安装在铲冰固定座一上,铲冰固定座一固定安装在架子上,异形凸轮固定安装在蜗轮连接杆上,滑动块转动安装在铲冰支撑架上,铲冰支撑架固定安装在固定圆杆上,固定圆杆滑动安装在铲冰固定座二上,铲冰固定座二固定安装在架子上,滑动摩擦轮转动安装在摆动杆上,摆动杆转动安装在铲冰支撑架上,铲子连接杆固定安装在摆动杆上,铲子固定安装在铲子连接杆上,所述的固定圆杆上套有弹簧,所述的蜗杆与蜗轮形成蜗轮蜗杆配合,所述的异形凸轮与滑动块形成滑动配合,所述的异形凸轮与滑动摩擦轮形成滑动配合。
凿冰锥齿轮一固定安装在电机轴上,凿冰锥齿轮二固定安装在凿冰主转动杆上,凿冰主转动杆转动安装在转动杆固定座上,转动杆固定座固定安装在架子上,凿冰斜齿轮一固定安装在凿冰主转动杆上,凿冰次转动杆转动安装在架子上,凿冰斜齿轮二固定安装在凿冰次转动杆上,圆轮固定安装在凿冰次转动杆上,圆柱固定安装在圆轮上,固定底板固定安装在架子上,锤子固定座一固定安装在固定底板上,锤子转动杆的一端固定安装在锤子固定座一上,另一端固定安装在锤子固定座二上,锤子固定座二固定安装在固定底板上,锤子转动安装在锤子转动杆上。
进一步地,所述的车轮为橡胶材质,表面安装有抓地齿。
进一步地,所述的行走贴板与连杆连接的对立面设置有防滑片。
进一步地,所述的异形凸轮上设置有半圈大于异形凸轮本身的凸起弧形块。
进一步地,所述的异形凸轮表面设置有滑道,且滑道中间高,两边低。
进一步地,所述的滑动块上设置有滑轨。
进一步地,所述的铲子离地面最近端为薄一些。
进一步地,所述的锤子离地面最近端为尖锐状。
本发明与现有技术相比的有益效果是:本发明可以在自动一步到位除冰,并且在寒冷天气代替人工清除电缆桥架上的冰,操作简单,效率高,减少人工成本。
附图说明
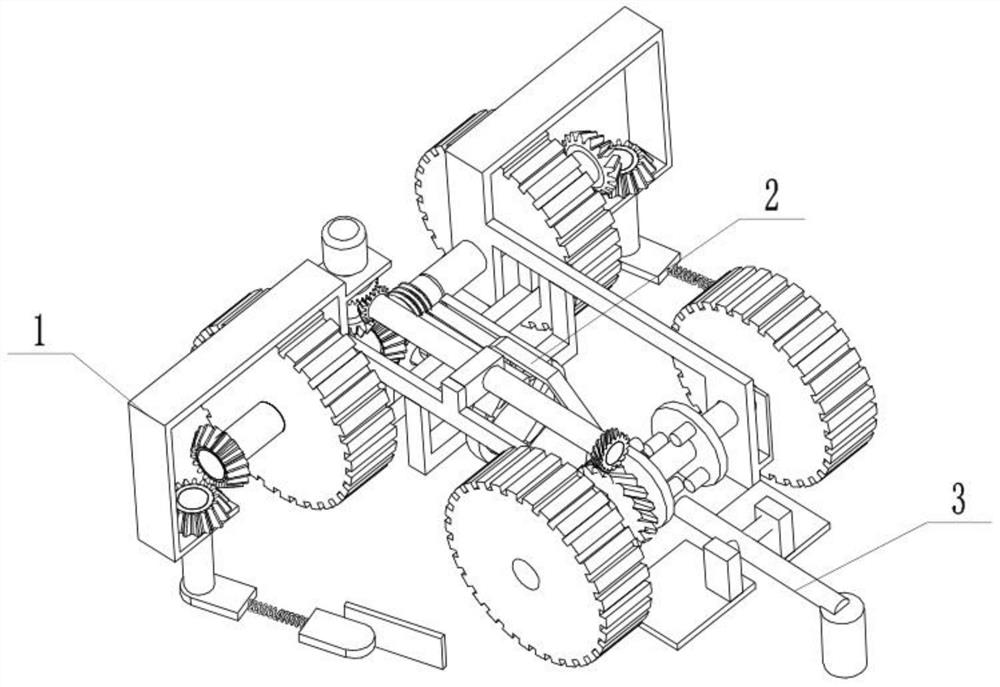
图1为本发明整体结构示意图。
图2为本发明行走机构结构示意图。
图3为本发明铲冰机构结构示意图。
图4为本发明凿冰机构结构示意图。
附图标号:1-行走机构;2-铲冰机构;3-凿冰机构;101-电机;102-电机轴固定板;103-架子;104-行走锥齿轮一;105-电机轴;106-行走锥齿轮二;107-主运动杆;108-行走锥齿轮三;109-行走锥齿轮四;110-行走转动杆;111-行走连杆;112-行走弹簧;113-行走贴板;114-车轮;201-蜗杆;202-蜗轮;203-蜗轮连接杆;204-铲冰固定座一;205-异形凸轮;206-滑动块;207-铲冰支撑架;208-铲冰固定座二;209-滑动摩擦轮;210-摆动杆;211-铲子连接杆;212-铲子;213-弹簧;214-固定圆杆;301-凿冰锥齿轮一;302-凿冰锥齿轮二;303-凿冰主转动杆;304-转动杆固定座;305-凿冰斜齿轮一;306-凿冰次转动杆;307-凿冰斜齿轮二;308-圆轮;309-圆柱;310-固定底板;311-锤子固定座一;312-锤子转动杆;313-锤子;314-锤子固定座二。
具体实施方式
下面结合具体实施例对本发明作进一步描述,在此发明的示意性实施例以及说明用来解释本发明,但并不作为对本发明的限定。
如图1-4所示:一种电力传输用电缆桥架除冰机器人,包括:行走机构1、铲冰机构2、凿冰机构3。
行走机构1包括:电机101、电机轴固定板102、架子103、行走锥齿轮一104、电机轴105、行走锥齿轮二106、主运动杆107、行走锥齿轮三108、行走锥齿轮四109、行走转动杆110、行走连杆111、行走弹簧112、行走贴板113、车轮114。
铲冰机构2包括:蜗杆201、蜗轮202、蜗轮连接杆203、铲冰固定座一204、异形凸轮205、滑动块206、铲冰支撑架207、铲冰固定座二208、滑动摩擦轮209、摆动杆210、铲子连接杆211、铲子212、弹簧213、固定圆杆214。
凿冰机构3包括:凿冰锥齿轮一301、凿冰锥齿轮二302、凿冰主转动杆303、转动杆固定座304、凿冰斜齿轮一305、凿冰次转动杆306、凿冰斜齿轮二307、圆轮308、圆柱309、固定底板310、锤子固定座一311、锤子转动杆312、锤子313、锤子固定座二314。
电机101固定安装在架子103上,电机轴固定板102固定安装在架子103上,行走锥齿轮一104固定安装在电机轴105上,电机轴105固定安装在电机101上,行走锥齿轮二106固定安装在主运动杆107上,行走锥齿轮二106与行走锥齿轮一104形成齿轮配合,主运动杆107转动安装在架子103上,行走锥齿轮三108固定安装在主运动杆107上,行走锥齿轮四109固定安装在行走转动杆110上,行走转动杆110转动安装在架子103上,行走锥齿轮三108与行走锥齿轮四109形成齿轮配合,行走连杆111固定安装在行走转动杆110上,行走弹簧112固定安装在行走连杆111上,行走贴板113固定安装在行走连杆111上,车轮114转动安装在架子103上,由图可见为4个轮子,图中后轮子连接件未画出,但是前轮画出了,同前轮的连接方式一样;车轮114为橡胶材质,表面安装有抓地齿。防滑更稳定的在冰上面行走。在行走连杆111转动带动行走贴板113贴住电缆桥架的侧壁,通过行走弹簧112的伸展压缩,推动整个装置前进。行走贴板113与连杆连接的对立面设置有防滑片。增大摩擦力。由图可见,行走装置为两个对称安装的结构,另外一边未标号,但是功能一样。左右两个推动装置向前移动,轮子起到一个滑动的作用。
蜗杆201固定安装在主运动杆107上,蜗轮202固定安装在蜗轮连接杆203上,蜗轮连接杆203转动安装在铲冰固定座一204上,铲冰固定座一204固定安装在架子103上,异形凸轮205固定安装在蜗轮连接杆203上,滑动块206转动安装在铲冰支撑架207上,铲冰支撑架207固定安装在固定圆杆214上,固定圆杆214滑动安装在铲冰固定座二208上,铲冰固定座二208固定安装在架子103上,滑动摩擦轮209转动安装在摆动杆210上,摆动杆210转动安装在铲冰支撑架207上,铲子连接杆211固定安装在摆动杆210上,铲子212固定安装在铲子连接杆211上,铲子212离地面最近端为薄一些,下端薄更利于刮冰。固定圆杆214上套有弹簧213,蜗杆201与蜗轮202形成蜗轮蜗杆配合,异形凸轮205与滑动块206形成滑动配合,异形凸轮205与滑动摩擦轮209形成滑动配合;异形凸轮205上设置有半圈大于异形凸轮205本身的凸起弧形块。异形凸轮205表面设置有滑道,且滑道中间高,两边低。滑动块206上设置有滑轨。使得铲子能先落地,再后退,挂掉电缆桥架上的冰。
凿冰锥齿轮一301固定安装在电机轴105上,凿冰锥齿轮二302固定安装在凿冰主转动杆303上,凿冰主转动杆303转动安装在转动杆固定座304上,转动杆固定座304固定安装在架子103上,凿冰斜齿轮一305固定安装在凿冰主转动杆303上,凿冰次转动杆306转动安装在架子103上,凿冰斜齿轮二307固定安装在凿冰次转动杆306上,圆轮308固定安装在凿冰次转动杆306上,圆柱309固定安装在圆轮308上,固定底板310固定安装在架子103上,锤子固定座一311固定安装在固定底板310上,锤子转动杆312的一端固定安装在锤子固定座一311上,另一端固定安装在锤子固定座二314上,锤子固定座二314固定安装在固定底板310上,锤子313转动安装在锤子转动杆312上。通过圆轮308转动,由设置在上面的圆柱309间歇推动锤子313,做上下运动,一上一下便于凿冰。锤子313离地面最近端为尖锐状。更有利于凿冰。整个装置工作时,先由前面的锤子凿破冰,再由后面的铲子进行刮动,能有效地除冰。
- 一种电力传输用电缆桥架除冰机器人
- 一种梯式电缆桥架机器人焊接工作站