一种基于旋转杠杆半桥放大器的三平动解耦微定位器
文献发布时间:2023-06-19 10:06:57
技术领域
本发明涉及基于微纳米定位机构的纳米成像和纳米加工技术,特别涉及一种基于旋转杠杆半桥放大器的三平动解耦微定位器。
背景技术
随着半导体加工领域、微机电系统、生物微纳米操作领域的发展,微纳米定位器在精密工程领域起着越来越重要的作用,其中,三平动微定位器是应用最广泛的定位机构,其性能直接影响着微纳操作的质量和效率。
主流的三平动微定位平台主要有串联和并联两种布置形式,将串联与并联组合的串并联平台结合了两者优点,同时具备紧凑的尺寸,抗负载能力,以及较高的解耦性能,因此其应用越来越广泛。
压电陶瓷驱动器驱动柔性铰链机构能够克服传统运动副机构所产生的装配误差、摩擦、冲击等不利因素,因此成为目前的研究热点,但是压电陶瓷驱动器的行程有限,无法满足大量程的微纳米制造的需求,因此有必要引入位移放大机构扩大工作空间。目前的微定位器大多采用杠杆放大机构、Scott-Russell放大机构、差动放大机构、以及桥式放大机构扩大工作空间。但是这些放大机构会造成微定位器尺寸不够紧凑,存在寄生位移以及耦合误差。
发明内容
本发明的目的是克服现有技术中的不足,提供一种基于旋转杠杆半桥放大器的三平动微定位器,该定位器具有X向平动、Y向平动、Z向平动三自由度、大行程、结构紧凑、解耦能力强等特点。
本发明所采用的技术方案是:一种基于旋转杠杆半桥放大器的三平动解耦微定位器,包括XY定位器和Z定位器;
所述Z定位器采用串联方式嵌入在所述XY定位器的输出末端,所述Z定位器的内部设置有Z向压电陶瓷驱动器,所述Z向压电陶瓷驱动器与位于所述Z定位器上部的中央动平台相接触;
所述XY定位器包括四个并联连接的运动支链,四个所述运动支链沿所述Z定位器的周向均匀布置,并且,四个所述运动支链中,其中两个所述运动支链沿X向布置,另外两个所述运动支链沿Y向布置;每个所述运动支链包括用于实现位移放大的旋转杠杆半桥放大器和用于实现位移传递的平行四边形机构,所述旋转杠杆半桥放大器的输出端与所述平行四边形机构的输入端相连,所述平行四边形机构的输出端与所述Z定位器相连;
沿X向布置的两个所述运动支链中的任意一个所述运动支链采用X向压电陶瓷驱动器驱动,所述X向压电陶瓷驱动器与沿X向布置的其中一个所述运动支链的旋转杠杆半桥放大器的输入端相连;沿Y向布置的两个所述运动支链中的任意一个所述运动支链采用Y向压电陶瓷驱动器驱动,所述Y向压电陶瓷驱动器与沿Y向布置的其中一个所述运动支链的旋转杠杆半桥放大器的输入端相连。
进一步地,所述中央动平台与所述Z定位器之间通过第一平行叶片型柔性铰链相连,实现位移导向功能。
进一步地,所述旋转杠杆半桥放大器包括两个旋转杠杆机构、两个传力杆、一个半桥机构、一个凹面输入机构和两个第二平行叶片型柔性铰链;两个所述旋转杠杆机构对称设置在所述X向压电陶瓷驱动器或Y向压电陶瓷驱动器的两侧,两个所述旋转杠杆机构的回转部均与固定基体旋转连接,两个所述旋转杠杆机构的输出端分别与所述半桥机构的两端相连,所述半桥机构的中部与所述平行四边形机构的输入端相连;所述X向压电陶瓷驱动器或Y向压电陶瓷驱动器的一侧与所述固定基体固定连接,所述X向压电陶瓷驱动器或Y向压电陶瓷驱动器的另一侧与半球状陶瓷转接头粘接,所述半球状陶瓷转接头与所述凹面输入机构的圆柱面配合接触;所述凹面输入机构的两侧分别与两个所述第二平行叶片型柔性铰链的其中一端相连、内侧分别与两个所述传力杆的输入端相连,两个所述第二平行叶片型柔性铰链的另一端均与所述固定基体固定连接,两个所述传力杆的输出端分别与两个所述旋转杠杆机构相连。
本发明的有益效果是:本发明一种基于旋转杠杆半桥放大器的三平动解耦微定位器,XY定位器采用并联方式,Z定位器采用串联方式嵌入XY定位器输出末端,以获得高刚度和紧凑结构;XY定位器中将压电陶瓷驱动器内置于放大机构中来减小定位器尺寸,使结构紧凑;XY定位器整体由四个旋转杠杆半桥放大机构并联连接,采用四个运动支链对称布置来防止寄生位移产生,同时,每两个邻近的运动支链正交布置,从而实现XY方向运动解耦,此外,全对称结构也会减小热变形和外部干扰影响,使X和Y方向具有对等性能;设计的旋转杠杆半桥放大机构在具有可观的放大倍数的同时,具有较大的横向刚度,能够抵抗不理想的横向负载,以减小外界干扰的影响,具备良好的动态性能;压电陶瓷驱动器粘接一半球状的陶瓷转接头,将压电陶瓷可能受到的集中力均匀分布在压电陶瓷片上,防止压电陶瓷驱动器被破坏;将放大机构输入端设计为圆柱凹面与半球陶瓷转接头配合,提供良好的限位功能以及自动对心功能,防止压电陶瓷驱动器偏移,以减小装配误差和输出耦合误差;混合放大机构与Z定位器之间通过平行四边形机构连接,该机构在轴向方向具有较大的刚度,在横向方向具有较小的刚度,在将放大机构产生的力和位移传递给Z定位器的同时,能够避免X和Y方向驱动器的相互影响,以减小输入耦合误差。
附图说明
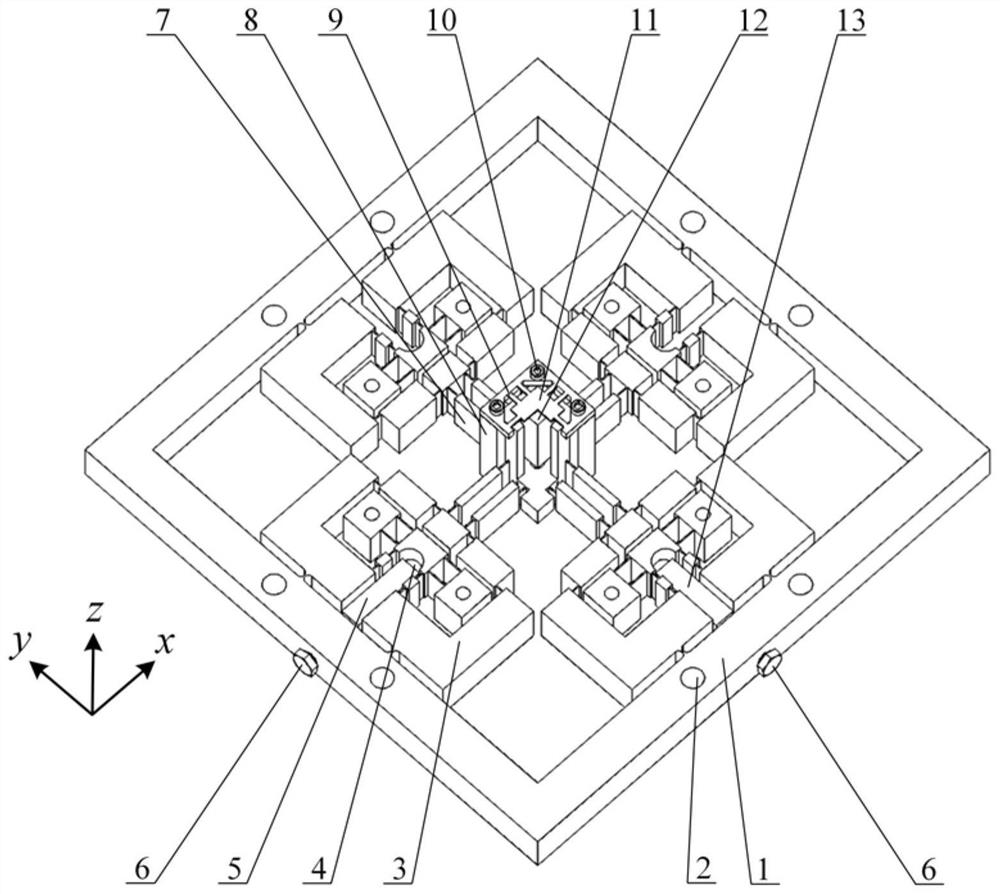
图1:本发明一种基于旋转杠杆半桥放大器的三平动解耦微定位器结构示意图;
图2:本发明的旋转杠杆半桥放大器结构示意图;
附图标注:1、固定基体;2、定位孔;3、旋转杠杆半桥放大器;4、半球状陶瓷转接头;5、X向压电陶瓷驱动器;6、预紧螺栓;7、平行四边形机构;8、Z定位器;9、第一平行叶片型柔性铰链;10、装配螺栓;11、中央动平台;12、Z向压电陶瓷驱动器;13、Y向压电陶瓷驱动器;
3-1、旋转杠杆机构;3-2、传力杆;3-3、半桥机构;3-4、凹面输入机构;3-5、第二平行叶片型柔性铰链。
具体实施方式
为能进一步了解本发明的发明内容、特点及功效,兹例举以下实施例,并配合附图详细说明如下:
如附图1所示,一种基于旋转杠杆半桥放大器的三平动解耦微定位器,通过定位孔2固定到工作平台上。本发明定位器为板材线切割成型的大小两个定位器(XY定位器和Z定位器8)组成。
为了获得高刚度和紧凑的结构,所述XY定位器采用并联方式。所述XY定位器整体由四个运动支链并联连接,四个所述运动支链对称布置来防止产生寄生位移,同时,四个所述运动支链中,其中两个所述运动支链沿X向布置,另外两个所述运动支链沿Y向布置,即,每两个相邻的所述运动支链正交布置,实现XY方向运动解耦。每个所述运动支链由一个用于实现位移放大的旋转杠杆半桥放大器3和一个用于实现位移传递的平行四边形机构7串联连接组成,所述旋转杠杆半桥放大器3的输出端与所述平行四边形机构7的输入端相连,所述平行四边形机构7的输出端与所述Z定位器8相连。沿X向布置的两个所述运动支链中的任意一个所述运动支链采用X向压电陶瓷驱动器5驱动,另一个所述运动支链则未安装X向压电陶瓷驱动器5,所述X向压电陶瓷驱动器5与沿X向布置的其中一个所述运动支链的旋转杠杆半桥放大器3的输入端相连;沿Y向布置的两个所述运动支链中的任意一个所述运动支链采用Y向压电陶瓷驱动器13驱动,另一个所述运动支链则未安装Y向压电陶瓷驱动器13,所述Y向压电陶瓷驱动器13与沿Y向布置的其中一个所述运动支链的旋转杠杆半桥放大器3的输入端相连。
所述Z定位器8采用串联方式嵌入在所述XY定位器的输出末端。中央动平台11通过装配螺栓10固定连接在所述Z定位器8的上部,Z向压电陶瓷驱动器12嵌入在所述Z定位器8之中与所述中央动平台11相接触。所述中央动平台11与所述Z定位器8之间通过第一平行叶片型柔性铰链9相连,实现位移导向功能。
如图2所示,所述旋转杠杆半桥放大器3包括两个旋转杠杆机构3-1、两个传力杆3-2、一个半桥机构3-3、一个凹面输入机构3-4、两个第二平行叶片型柔性铰链3-5;两个所述旋转杠杆机构3-1对称设置在所述X向压电陶瓷驱动器5或Y向压电陶瓷驱动器13的两侧,每个所述旋转杠杆机构3-1的回转部与固定基体1旋转连接,两个所述旋转杠杆机构3-1的输出端分别与所述半桥机构3-3的两端相连,所述半桥机构3-3的中部与所述平行四边形机构7的输入端相连;所述X向压电陶瓷驱动器5或Y向压电陶瓷驱动器13的一侧通过预紧螺栓6预紧一端与所述固定基体1接触,所述X向压电陶瓷驱动器5或Y向压电陶瓷驱动器13的另一侧与半球状陶瓷转接头4粘接,所述半球状陶瓷转接头4与所述凹面输入机构3-4的圆柱面配合接触;所述凹面输入机构3-4的两侧分别与两个所述第二平行叶片型柔性铰链3-5的其中一端相连、内侧分别与两个所述传力杆3-2的输入端相连,两个所述第二平行叶片型柔性铰链3-5的另一端均与所述固定基体1固定连接,两个所述传力杆3-2的输出端分别与两个所述旋转杠杆机构3-1相连。
沿X向所述中央动平台11的两侧对称设置有一组所述平行四边形机构7,各所述平行四边形机构7分别与对应的所述旋转杠杆半桥放大器3连接,任意一侧的所述旋转杠杆半桥放大器3的内部安装有X向压电陶瓷驱动器5,所述旋转杠杆半桥放大器3被X向压电陶瓷驱动器5驱动;所述X向压电陶瓷驱动器5通过与其相连的沿X向设置的所述旋转杠杆半桥放大器3带动所述中央动平台11沿X向运动。
沿Y向所述中央动平台11的两侧对称设置有一组所述平行四边形机构7,各所述平行四边形机构7分别与对应的所述旋转杠杆半桥放大器3连接,任意一侧的所述旋转杠杆半桥放大器3的内部安装有Y向压电陶瓷驱动器13,所述旋转杠杆半桥放大器3被Y向压电陶瓷驱动器13驱动;所述Y向压电陶瓷驱动器13通过与其相连的沿Y向设置的所述旋转杠杆半桥放大器3带动所述中央动平台11沿Y向运动。
沿Z向所述中央顶平台的周侧连接有四组所述第一平行叶片型柔性铰链9,所述第一平行叶片型柔性铰链9的另一侧与所述Z定位器8连接;所述Z向压电陶瓷驱动器12直接驱动所述中央动平台11沿Z向运动。
本发明的工作原理:
当X向压电陶瓷驱动器5输入驱动电压时,X向压电陶瓷驱动器5将会伸长并推动凹面输入机构3-4沿X向运动,凹面输入机构3-4拉动传力杆3-2沿X向运动,传力杆3-2拉动旋转杠杆机构3-1沿固定铰链旋转,一组旋转杠杆机构3-1分别拉动半桥机构3-3向两端伸长,使半桥机构3-3的中部沿X反向运动,半桥机构3-3的中部带动平行四边形机构7,将位移与力传递给中央动平台11,使中央动平台11沿X向反方向运动。
当Y向压电陶瓷驱动器13输入驱动电压时,驱动原理同X方向相同。
当Z向压电陶瓷驱动器12输入驱动电压时,Z向压电陶瓷驱动器12伸长,直接推动中央动平台11沿Z方向运动。
尽管上面结合附图对本发明的优选实施例进行了描述,但是本发明并不局限于上述的具体实施方式,上述的具体实施方式仅仅是示意性的,并不是限制性的,本领域的普通技术人员在本发明的启示下,在不脱离本发明宗旨和权利要求所保护的范围情况下,还可以做出很多形式,这些均属于本发明的保护范围之内。