一种兼具有盘沿轮廓测量功能的瓷盘移载机构
文献发布时间:2023-06-19 11:00:24
技术领域
本发明涉及陶瓷品外观检测技术领域,尤其是一种兼具有盘沿轮廓测量功能的瓷盘移载机构。
背景技术
瓷盘是由瓷石、高岭土、石英石、莫来石等烧制而成,外表施有玻璃质釉或彩绘的物器,瓷器的成形要通过在窑内经过高温(约1280℃-1400℃)烧制,瓷器表面的釉色会因为温度的不同从而发生各种化学变化。瓷器分为多种,一般都是利用手工或者模具使得其形成一定的形状,使得其稍微变干之后,对其测沿和侧面进行一次检测,然后在进行烧制,烧制到一定程度时,在对其表面进行二次检测,防止在高温的作用下发生应力性的形变,检测之后添补、刻画或者上釉,最后进行定型烧制。
以前,通常采用人眼视力以检测瓷盘的测沿以及侧面上是否存在有裂纹,辅助靠尺等工具以检测侧沿的整体水平度,整个检测过程费时费力,大大增加了用工成本,且受到检测工人操作应验以及工作状态的影响极易发生“漏检”、“误检”现象。鉴于此,本公司近期开发了一款瓷盘外观自动检测线。
在现有技术中,瓷盘外观自动检测线借由瓷盘移载机构以实现对瓷盘相对位置的转移。在瓷盘移载机构的一侧还设置有盘缘轮廓测量系统,以测量出瓷盘盘缘各区域的形状公差以及尺寸公差是否满足要求,进而判定瓷盘的轮廓度是否符合标准。如此一来,一方面,瓷盘移载机构、盘缘轮廓测量系统均需要各自独立进行成型,且在机台上占据一定的空间,从而增大了机台的设计尺寸;另一方面,瓷盘移载机构、盘缘轮廓测量系统的总制造投入较高,进而在一定程度上增加了瓷盘外观自动检测线的制造成本。因而,亟待技术人员解决上述问题。
发明内容
故,本发明设计人员鉴于上述现有的问题以及缺陷,乃搜集相关资料,经由多方的评估及考量,并经过从事于此行业的多年研发经验技术人员的不断实验以及修改,最终导致该兼具有盘沿轮廓测量功能的瓷盘移载机构的出现。
为了解决上述技术问题,本发明涉及了一种兼具有盘沿轮廓测量功能的瓷盘移载机构,其包括搬运机器人、安装板、真空吸附单元以及激光镭射测距仪。搬运机器人包括有机器人本体和机械手臂。安装板与机械手臂相固定。真空吸附单元、激光镭射测距仪均可拆卸地固定于安装板上,且相互间隔设定距离。
作为本发明技术方案的进一步改进,安装板优选为L形板,其由第一分段和第二分段连接而成。第一分段、第二分段分别用来固定真空吸附单元、激光镭射测距仪。
作为本发明技术方案的进一步改进,真空吸附单元包括有固定基板、真空吸嘴组件以及直线驱动元件。固定基板可拆卸地固定于安装板上。直线驱动元件可拆卸地固定于固定基板上,以驱动真空吸嘴组件进行线性位移运动。
作为本发明技术方案的更进一步改进,真空吸嘴组件包括有安装基板以及真空吸嘴。真空吸嘴的数量至少为3个,均插设于安装基板上,且以圆周阵列方式进行排布。
作为本发明技术方案的更进一步改进,直线驱动元件优选为滑台气缸。滑台气缸包括有气缸本体和滑移台。气缸本体、滑移台分别与固定基板、安装基板直接相固定。
当然,作为上述技术方案的另一种改型设计,直线驱动元件亦可以优选为液压缸或直线电机。
相较于传统设计结构的瓷盘移载机构,在本发明所公开的技术方案中,其同时配套有真空吸附单元和激光镭射测距仪,从而使得瓷盘移载机构在移载瓷盘功能的基础之上兼具有盘沿轮廓测量功能。在实际工作过程中,机械手臂发生动作,以将激光镭射测距仪移动至待检测瓷盘的正上方,而后借由激光镭射测距仪对瓷盘的盘沿进行检测,以确认瓷盘盘缘各区域的形状公差以及尺寸公差是否满足要求。当瓷盘的盘沿轮廓度检测结果满足检验标准时,机械手臂再次发生动作,以将真空吸附单元移动至待检测瓷盘的正上方,而后借由真空吸附单元将瓷盘转移至良品输送线;而当瓷盘的盘沿轮廓度检测结果不满足检验标准时,机械手臂再次发生动作,以将真空吸附单元移动至待检测瓷盘的正上方,而后借由真空吸附单元将瓷盘转移至不良品放置工装内。如此一来,一方面,瓷盘外观自动检测线无需单独地配套有盘缘轮廓测量系统,从而简化了其设计结构,且利于进行整体空间设计、布局;另一方面,兼具有盘沿轮廓测量功能的瓷盘移载机构相较于瓷盘移载机构、盘缘轮廓测量系统独立制造所需投入的制造成本相对较低。
附图说明
为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
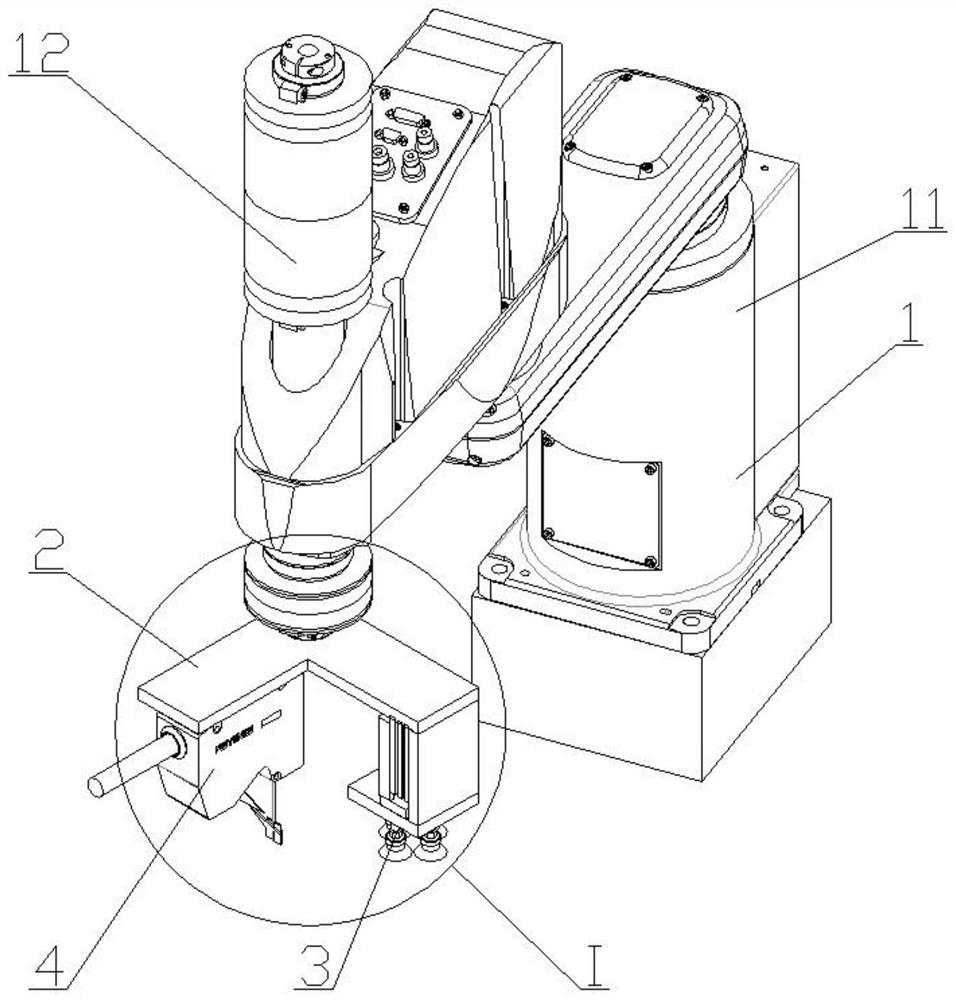
图1是本发明中兼具有盘沿轮廓测量功能的瓷盘移载机构的立体示意图。
图2是图1的I局部放大图。
图3是图1的侧视图。
图4是图3的II局部放大图。
图5是本发明中兼具有盘沿轮廓测量功能的瓷盘移载机构实际应用状态下的示意图。
1-搬运机器人;11-机器人本体;12-机械手臂;2-安装板;3-真空吸附单元;31-固定基板;32-真空吸嘴组件;321-安装基板;322-真空吸嘴;33-滑台气缸;331-气缸本体;332-滑移台;4-激光镭射测距仪。
具体实施方式
图5示出了本发明中兼具有盘沿轮廓测量功能的瓷盘移载机构实际应用状态下的示意图,可知,其布置瓷盘输送线的一侧,以实时地对瓷盘进行盘沿轮廓度检测以及持取操作。
为了便于本领域技术人员充分理解本发明所公开的技术方案,下面结合具体实施例,对本发明的内容做进一步的详细说明,图1示出了本发明中兼具有盘沿轮廓测量功能的瓷盘移载机构的立体示意图,可知,其主要由搬运机器人1、安装板2、真空吸附单元3以及激光镭射测距仪4等几部分构成。其中,搬运机器人1可拆卸地固定于瓷盘外观自动检测线的机台上,且其包括有机器人本体11和机械手臂12。安装板2与机械手臂12相固定。真空吸附单元3、激光镭射测距仪4均可拆卸地固定于安装板2上,且相互间隔设定距离。机械手臂具有X移动,Y移动,Z移动,X转动,Y转动,Z转动六个自由度,以同时承载真空吸附单元3和激光镭射测距仪4达空间内的任何坐标点。通过采用上述技术方案进行设置,从而使得瓷盘移载机构在移载瓷盘功能的基础之上兼具有盘沿轮廓测量功能。这样一来,一方面,瓷盘外观自动检测线无需单独地配套有盘缘轮廓测量系统,从而简化了其设计结构,且利于进行整体空间设计、布局;另一方面,兼具有盘沿轮廓测量功能的瓷盘移载机构相较于瓷盘移载机构、盘缘轮廓测量系统独立制造所需投入的制造成本相对较低。
上述兼具有盘沿轮廓测量功能的瓷盘移载机构的工作原理大致如下:在实际工作过程中,机械手臂12发生动作,以将激光镭射测距仪4移动至待检测瓷盘的正上方,而后借由激光镭射测距仪4对瓷盘的盘沿进行检测,以确认瓷盘盘缘各区域的形状公差以及尺寸公差是否满足要求。当瓷盘的盘沿轮廓度检测结果满足检验标准时,机械手臂12再次发生动作,以将真空吸附单元3移动至待检测瓷盘的正上方,而后借由真空吸附单元3将瓷盘转移至良品输送线;而当瓷盘的盘沿轮廓度检测结果不满足检验标准时,机械手臂12再次发生动作,以将真空吸附单元3移动至待检测瓷盘的正上方,而后借由真空吸附单元3将瓷盘转移至不良品放置工装内。
作为上述兼具有盘沿轮廓测量功能的瓷盘移载机构结构的进一步细化,如图2中所示,安装板2优选为L形板,其由第一分段和第二分段连接而成。第一分段、第二分段分别用来固定真空吸附单元3、激光镭射测距仪4。如此一来,在确保安装板2具有极简设计结构的前提下,不但有效地确保了真空吸附单元3和激光镭射测距仪4之间具有合理的间距,且在机械手臂进行Z转动的进程中利于激光镭射测距仪4收集瓷盘的盘沿数据。
如图3、4中所示,真空吸附单元3优选有固定基板31、真空吸嘴组件32以及滑台气缸33。固定基板31可拆卸地固定于安装板2上。滑台气缸33包括有气缸本体331和滑移台332。气缸本体331与固定基板31相固定。滑移台332以直接驱动真空吸嘴组件32进行线性位移运动。当激光镭射测距仪4对瓷盘的盘沿轮廓度检测操作执行完毕,滑台气缸33发生动作,以拖动真空吸嘴组件32下移一段距离,以保证其相对于激光镭射测距仪4具有一定的高度差,进而确保真空吸嘴组件32对瓷盘进行吸附操作时激光镭射测距仪4与瓷盘相隔一段距离,杜绝因机械手臂12错误动作而导致的激光镭射测距仪4磕碰受损现象的发生。
在此需要说明一点,除了可以选取上述的滑台气缸33对真空吸嘴组件32进行线性驱动,亦可以根据实际应用场合择优选用普通气缸、液压缸或直线电机。
另外,由图3、4中还可以看出,真空吸嘴组件32优选包括有安装基板321以及真空吸嘴322。真空吸嘴322的数量至少为3个,均插设于安装基板321上,且以圆周阵列方式进行排布。如此一来,即使机械手臂12动作过程中存在少许位移误差,由于各个真空吸嘴322的体积相对较小,且进行周向均布,因此,有效地减小了真空吸嘴322因吸附位置不准确而导致的“偏吸”现象发生的几率,确保了各真空吸嘴322对瓷盘底壁进行可靠、稳定的吸附,杜绝了瓷盘在后续移载进程中因坠落而受损现象的发生。
对所公开的实施例的上述说明,使本领域专业技术人员能够实现或使用本发明。对这些实施例的多种修改对本领域的专业技术人员来说将是显而易见的,本文中所定义的一般原理可以在不脱离本发明的精神或范围的情况下,在其它实施例中实现。因此,本发明将不会被限制于本文所示的这些实施例,而是要符合与本文所公开的原理和新颖特点相一致的最宽的范围。