一种反应堆主泵接管焊缝检查装置
文献发布时间:2023-06-19 13:45:04
技术领域
本发明涉及反应堆在役检查领域,具体涉及一种反应堆主泵接管焊缝检查装置。
背景技术
一体化反应堆压力容器主泵接管焊缝属于I级焊缝,处于一回路压力边界,该条焊缝在反应堆运行时需承受高温、高压的考验,在反应堆运行过程中如若发生损坏,将导致试验堆堆芯压力下降、放射物质泄漏等严重事故后果,严重影响反应堆的运行安全,因此需要对该条焊缝进行在役检查,以确保其质量与可靠性。
主泵接管焊缝所处的环境结构非常复杂,其内部是一个双层套管或隔板结构。
如图1所示,双层套管结构的主泵接管内部装有套管,套管采取偏置安装,焊缝外部包有保温层及异形屏蔽钢,管子周围还有支撑裙遮挡,
如图2所示,隔板结构的主泵接管内部中央置有隔板,焊缝外部包有保温层及异形屏蔽钢,管子周围还有支撑裙遮挡。
通常的民用反应堆压力容器类似的接管焊缝内没有套管,对其的检查是通过水下γ射线检查装置将射线源至于管道中间对其进行周向曝光。但对于一体化反应堆主泵接管的特殊结构,由于主泵接管内部有套管或隔板遮挡,常规的水下γ射线探伤装置无法进入主泵接管内部。
同时由于保温层、异型屏蔽钢及支撑裙的遮挡,主泵接管外部也无底片布置空间。因此常规民用核电站采用的水下γ射线检查装置无法对其实施检查。
发明内容
本发明所要解决的技术问题是常规的检测方法和装置无法对一体化反应堆的压力容器的主泵接管进行检测,目的在于提供一种反应堆主泵接管焊缝检查装置,解决了反应堆主泵接管的焊接检测问题。
本发明通过下述技术方案实现:
一种反应堆主泵接管焊缝检查装置,包括:
主框架;
水下行走组件,其固定设置在所述主框架上并驱动所述主框架移动;
扫查组件,其具有第一端和第二端,所述扫查组件的第一端与所述主框架固定连接;
检测探头,其固定设置在所述扫查组件的第二端;
总控系统,其设置在反应堆外部,且与所述检测探头通信连接;
工作时,所述检测探头深入至所述主泵接管内。
进一步,所述焊缝检查装置还包括:
观察组件,其与所述主框架固定连接;
所述观察组件包括:
俯仰云台,其固定端与所述主框架固定连接;
摄像头,其与所述俯仰云台的移动端固定连接;
照明组件,其与所述主框架固定连接;
所述照明组件包括:
多个探照灯,多个所述探照灯均与所述主框架固定连接,且对所述主框架提供一定范围内的光照度;
所述观察组件的信号端与所述总控系统的信号端通信连接,所述照明组件的控制端与所述总控系统的控制端通信连接。
具体地,设定所述主框架为矩形框架,所述扫查组件与所述主框架的上侧面平行设置,所述扫查组件与所述主框架的前侧面垂直设置,所述扫查组件的第二端与所述主框架的前侧面之间的距离小于所述扫查组件的第二端与所述主框架的后侧面之间的距离;
至少一个所述探照灯的照明方向朝向所述主框架的前侧面。
具体地,所述水下行走组件包括:
第一推进器,其与所述主框架固定连接,且所述第一推进器的推力方向垂直与所述主框架的前侧面;
第二推进器,其与所述主框架固定连接,且所述第二推进器的推力方向垂直与所述主框架的上侧面;
第三推进器,其与所述主框架固定连接,所述第三推进器的推力方向垂直与所述第一推进器的推力方向,且所述第三推进器的推力方向垂直与所述第二推进器的推力方向;
所述第一推进器的控制端、所述第二推进器的控制端和所述第三推进器的控制端均与所述总控系统的控制端通信连接。
优选地,所述扫查组件包括:
伸缩机械手,其固定端与所述主框架固定连接;
固定插座,其与所述伸缩机械手的伸缩端固定连接,且所述检测插头设置有与所述固定插座适配的固定插头,所述检测插头与伸缩机械手通过所述固定插座和所述固定插头可拆卸连接。
进一步,所述焊缝检查装置,还包括固定组件,其与所述主框架固定连接,且所述主框架通过所述固定组件与所述反应堆的压力容器连接;
所述固定组件包括:
上部固定件,其具有连接端和固定端,所述上部固定件的连接端与所述主框架的上侧面固定连接;
下部固定件,其具有连接端和固定端,所述下部固定件的连接端与所述主框架的下侧面固定连接;
其中,所述上部固定件、所述下部固定件均与所述扫查组件平行设置,所述上部固定件的控制端和所述下部固定件的控制端均与所述总控系统的控制端电连接。
作为一个实施例,所述上部固定件和所述下部固定组件的固定端均为机械手,所述上部固定件的机械手夹持住位于所述主泵接管上方的上隔板,所述下部固定件的机械手夹持住位于所述主泵接管下方的下隔板,所述机械手的控制端均与所述总控系统的控制端电连接。
优选地,所述主框架的前侧面还设置有多个对准柱,其与位于所述主泵接管处的定位筒对应设置,工作时,所述定位筒与所述对准柱连接。
进一步,所述焊缝检查装置,还包括浮力块,其固定设置在所述主框架内,且所述水下行走组件、所述观察组件和所述照明组件均设置在所述浮力块的下方。
优选地,所述检测探头为目视探头或超声探头。
本发明与现有技术相比,具有如下的优点和有益效果:
本发明将检测探头通过扫查组件安装在主框架上,并通过水下行走组件控制器在水下进行移动,然后将其置于反应堆的压力容器内,通过深入主泵接管内部的检测探头实现对焊缝的检查。
附图说明
附图示出了本发明的示例性实施方式,并与其说明一起用于解释本发明的原理,其中包括了这些附图以提供对本发明的进一步理解,并且附图包括在本说明书中并构成本说明书的一部分,并不构成对本发明实施例的限定。
图1是根据本发明所述的反应堆压力容器主泵接管的结构示意图。
图2是根据本发明所述的反应堆压力容器主泵接管的另一个结构示意图。
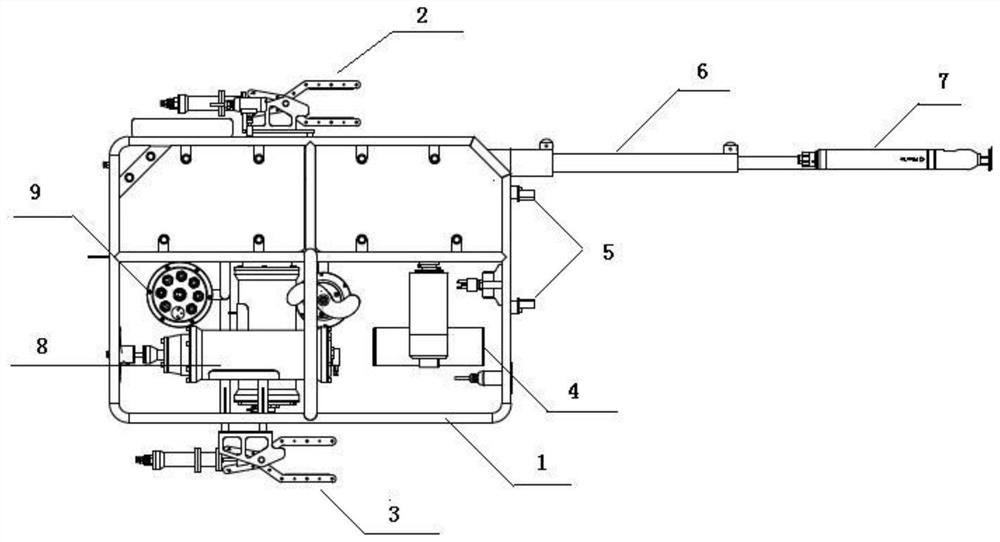
图3是根据本发明所述的一种反应堆主泵接管焊缝检查装置的结构示意图。
附图标记:1-主框架,2-上部固定件,3-下部固定件,4-观察组件,5-对准柱,6-扫查组件,7-检测探头,8-照明组件,9-水下行走组件。
具体实施方式
为使本发明的目的、技术方案和优点更加清楚明白,下面结合附图和实施方式对本发明作进一步的详细说明。可以理解的是,此处所描述的具体实施方式仅用于解释相关内容,而非对本发明的限定。
另外还需要说明的是,为了便于描述,附图中仅示出了与本发明相关的部分。
在不冲突的情况下,本发明中的实施方式及实施方式中的特征可以相互组合。下面将参考附图并结合实施方式来详细说明本发明。
实施例一
一种反应堆主泵接管焊缝检查装置,包括主框架、水下行走组件、扫查组件、探测探头和总控系统。
所述检测探头为目视探头或超声探头,其能够实现对焊缝位置进行探测。
水下行走组件为可以驱动整个装置在压力容器内移动的装置,从而在一体化反应堆的内部水下空间实现上升、下潜、前进、后退、转弯和悬浮等功能,前进、后退速度连续可调,具备匀速运动功能。
扫查组件其目的是为了连接主框架和检测探头。
总控系统为控制整个焊缝检查装置在水下进行移动的电控系统,同时可以将探测探头的探测到的焊缝的信息予以输出,总控系统为现阶段常见的控制系统,本领域技术人员可以根据情况进行程序的选择,且本实施例并不主要针对电控系统进行保护,因此不做具体的说明。
水下行走组件固定设置在所述主框架上并驱动所述主框架移动,扫查组件具有第一端和第二端,所述扫查组件的第一端与所述主框架固定连接,检测探头固定设置在所述扫查组件的第二端,总控系统设置在反应堆外部,且与所述检测探头通信连接。
总控系统与位于水下的各个组件之间可以通过电缆连接,因为其通过有线的方式进行连接,则可以直接通过电缆对检测探头、扫查组件、水下行走组件等进行供电。
总控系统与位于水下的各个组件之间可以通过无线通信连接,因为其通过无线的方式进行连接,则需要在总控系统与水下各组件之间安装无线连接模块,例如wifi模块,蓝牙模块等。同时,还需要对位于水下的各组件进行供电,则需要安装蓄电池在主框架内,对检测探头、扫查组件、水下行走组件等进行供电。
工作时,通过控制水下行走组件,将所述检测探头深入至所述主泵接管内,通过检测探头对主泵接管内的焊缝进行检测。
同时,所述主框架为矩形框架,同时,为了描述方便,对主框架的各个面进行命名,即上侧面、下侧面、前侧面和后侧面。
其具体位置为:所述扫查组件与所述主框架的上侧面平行设置,所述扫查组件与所述主框架的前侧面垂直设置,所述扫查组件的第二端与所述主框架的前侧面之间的距离小于所述扫查组件的第二端与所述主框架的后侧面之间的距离;
下述各实施例也采用上述方位进行描述。
实施例二
在实施实施例一中的结构时,通过水下行走组件对主框架的位置进行移动时,可能存在因无法查看到具体位置而导致检测探头无法深入至主泵接管内的进行,因此,本实施例中所述焊缝检查装置还包括观察组件和照明组件,观察组件和照明组件均与所述主框架固定连接;所述观察组件的信号端与所述总控系统的信号端通信连接,所述照明组件的控制端与所述总控系统的控制端通信连接。
本实施例中需要通过观察组件来对主框架周围的环境进行观测,因此通过安装一个摄像头来实现上述目的,通过摄像头将主框架周围的环境图像输出,从而通过在总控系统内对主框架位置的调节。
所述观察组件包括俯仰云台和摄像头,俯仰云台的固定端与所述主框架固定连接,摄像头与所述俯仰云台的移动端固定连接;
且该观察组件位于主框架的前侧面处,正好位于探测探头的下方,从而便于对探测探头的位置进行确认。
俯仰云台为一维转动范围±90°的云台,能够实现对主框架运动的实时监测,且能够承受辐照条件为工作剂量率≥1×105rad/h、累计剂量≥1×108rad。
水下的环境光线较暗,因此需要通过设置照明组件来增加亮度,便于摄像头更好的工作。
所述照明组件包括多个探照灯,多个所述探照灯均与所述主框架固定连接,且对所述主框架提供一定范围内的光照度;
且,为了实现对探测探头位置的确定,至少需要设置一个所述探照灯的照明方向朝向所述主框架的前侧面。
为了较好的实现照明效果,可以将多个探照灯的照明方向分别朝向前后左右下,实现多方位的照明效果。
实施例三
本实施例提供水下行走组件的具体结构,所述水下行走组件包括第一推进器、第二推进器和第三推进器:
推进器(Propeller)是将任何形式的能量转化为机械能的装置。通过旋转叶片或喷气(水)来产生推力的。
本实施例的推进器均通过电机带动旋转叶片来产生推力,且通过电机的正转和反转可以实现推力方向的改变。
第一推进器与所述主框架固定连接,且所述第一推进器的推力方向垂直与所述主框架的前侧面;
第二推进器与所述主框架固定连接,且所述第二推进器的推力方向垂直与所述主框架的上侧面;
第三推进器与所述主框架固定连接,所述第三推进器的推力方向垂直与所述第一推进器的推力方向,且所述第三推进器的推力方向垂直与所述第二推进器的推力方向;
通过设置至少三个推进器,并将第一推进器、第二推进器和第三推进器的推力方向相互垂直设置,最终实现了xyz三轴的推力控制,通过第一推进器、第二推进器和第三推进器的正转和反转,可以实现主框架在水下任意方向移动的目的。
所述第一推进器的控制端、所述第二推进器的控制端和所述第三推进器的控制端均与所述总控系统的控制端通信连接。
通过有线或无线的方式通过总控系统对第一推进器、第二推进器和第三推进器进行控制,可以实现远程控制装置的上升、下降、前进、后退及悬浮。
实施例四
本实施例对扫查组件的结构加以说,所述扫查组件包括伸缩机械手和固定插座。
伸缩机械手的固定端与所述主框架固定连接,长度为1200mm,载荷为6Kg,通过伸缩机械手的伸长或缩短,可以对主泵接管内的各个位置进行检测。
固定插座与所述伸缩机械手的伸缩端固定连接,且所述检测插头设置有与所述固定插座适配的固定插头,所述检测插头与伸缩机械手通过所述固定插座和所述固定插头可拆卸连接。
因为所述检测探头可以为目视探头或超声探头,同时还可以为不同的型号,因此设置为可以更换的固定插座与固定插头,可以根据目视探头或超声探头的类型进行方便快速更换。
实施例五
在进行主泵接管的焊缝检查时,需要保持位置不动,为了避免出现晃动,本实施例中的所述焊缝检查装置还包括固定组件,其与所述主框架固定连接,且所述主框架通过所述固定组件与所述反应堆的压力容器连接;
所述固定组件包括上部固定件和下部固定件,上部固定件具有连接端和固定端,所述上部固定件的连接端与所述主框架的上侧面固定连接;下部固定件具有连接端和固定端,所述下部固定件的连接端与所述主框架的下侧面固定连接;
所述上部固定件、所述下部固定件均与所述扫查组件平行设置,所述上部固定件的控制端和所述下部固定件的控制端均与所述总控系统的控制端电连接。
通过上部固定件和下部固定件将主框架与压力容器进行固定,从而可以在进行主泵接管的焊缝检测时,可以稳定检测。
实施例①
在本实施例中,所述上部固定件和所述下部固定组件的固定端均为机械手,所述上部固定件的机械手夹持住位于所述主泵接管上方的上隔板,所述下部固定件的机械手夹持住位于所述主泵接管下方的下隔板,所述机械手的控制端均与所述总控系统的控制端电连接。
其中上隔板和下隔板均为现阶段主泵接管处已有的结构,通过机械手的夹持,可以实现稳定的固定,且通过总控系统可以实现松开与夹紧。
实施例②
在本实施例中,所述上部固定件和所述下部固定组件的固定端均为电磁铁,所述上部固定件的电磁铁吸附在所述主泵接管上方的内壁上,所述下部固定件的电磁铁吸附在所述主泵接管下方的内壁上,所述电磁铁的控制端均与所述总控系统的控制端电连接。
通过设置电磁铁,并通过总控系统来控制电磁铁的磁力开关,当需要固定时,使通电其与压力容器吸附固定,当不需要固定式,使其断电与压力容器分离。
另外,为了实现对中的功能,在所述主框架的前侧面还设置多个对准柱,在压力容器的内侧面(主泵接管处)设置对应的定位筒。
工作时,所述定位筒与所述对准柱连接,将对准柱插入定位筒内,实现定位,便于上部固定件和下部固定件的固定。
实施例六
为了使焊缝检查装置在水中较好的移动,本实施例中增设一个浮力块,所述固定设置在所述主框架内,
通过浮力块和各个组件的位置以保证运动时的稳定性,因此需要将所述水下行走组件、所述观察组件和所述照明组件均设置在所述浮力块的下方。
重心位于主框架下部,可以增加其稳定性。
且上述所有实施例中的各个组件均需要保证个能保证20m水深环境下的水密性。
实施例七
本实施例提供本焊缝检测装置的操作步骤。
开启总控系统(其包括控制系统和数据采集系统等),进入控制软件界面和数据采集软件界面,检查焊缝检查装置是否正常;
设置运动参数和检查参数;
通过行吊将焊缝检查装置(除总控系统,下同)放入一体化反应堆压力容器水中;
通过总控操纵水下行走组件,使焊缝检查装置运动至指定位置;
通过观察组件观察对准柱和定位筒,对焊缝检查装置的位置进行对中;
通过总控系统操纵机械手夹持住压力容器内部的上下隔板边缘,实现焊缝检查装置的固定;
通过总控系统操纵伸缩机械手将检测探头伸出入内套管或隔板与主泵接管之间的空间,利用观察组件观察检查探头是否到达焊缝位置;
通过总控系统操纵检测探头对主泵接管焊缝进行检查;
检查完成后收回伸缩机械手,松开夹持机械手,操纵焊缝检查装置返回水面,利用行吊将其吊出。
在本说明书的描述中,参考术语“一个实施例/方式”、“一些实施例/方式”、“示例”、“具体示例”、或“一些示例”等的描述意指结合该实施例/方式或示例描述的具体特征、结构、材料或者特点包含于本申请的至少一个实施例/方式或示例中。在本说明书中,对上述术语的示意性表述不必须针对的是相同的实施例/方式或示例。而且,描述的具体特征、结构、材料或者特点可以在任一个或多个实施例/方式或示例中以合适的方式结合。此外,在不相互矛盾的情况下,本领域的技术人员可以将本说明书中描述的不同实施例/方式或示例以及不同实施例/方式或示例的特征进行结合和组合。
此外,术语“第一”、“第二”仅用于描述目的,而不能理解为指示或暗示相对重要性或者隐含指明所指示的技术特征的数量。由此,限定有“第一”、“第二”的特征可以明示或者隐含地包括至少一个该特征。在本申请的描述中,“多个”的含义是至少两个,例如两个,三个等,除非另有明确具体的限定。
本领域的技术人员应当理解,上述实施方式仅仅是为了清楚地说明本发明,而并非是对本发明的范围进行限定。对于所属领域的技术人员而言,在上述发明的基础上还可以做出其它变化或变型,并且这些变化或变型仍处于本发明的范围内。