一种多单元可调的智能化椎间融合器
文献发布时间:2023-06-19 09:44:49
技术领域
本发明涉及医疗器械技术领域,具体涉及一种多单元可调的智能化椎间融合器。
背景技术
随着我国人口老龄化速度的加快和现代社会生产生活方式(手机、电视、电脑等)的改变,颈椎病发病率呈逐年上升趋势,随之带来了沉重的社会和经济负担。颈椎病患者经保守治疗无效者、严重影响生活和工作者、疼痛无法忍受者以及脊髓型颈椎病应积极行手术治疗。其中,颈椎手术最经典的术式是经前路的颈椎间盘切除减压植骨融合术(ACDF)。术中椎间盘切除且减压完成后,使用颈椎曲度调节仪可以将患者颈椎曲度达到较好甚至是正常的状态,此时将进行椎间融合器的安放,将椎间融合器放入椎间隙中,目前使用较多的椎间融合器为强生公司的Zero-P产品,但由于患者上下终板的个体化差异,会导致该椎间融合器与其不能完全匹配,使得只有Zero-P只有部分区域与终板相接触,术后颈椎曲度的维持也只有靠几枚螺钉来维持,因此可能造成应力过于集中、螺钉松动、螺钉周围骨吸收、融合器下降以及影响植骨融合效率等情况,这也是ACDF术后出现翻修以及颈椎曲度维持不佳的重要因素的主要因素。现有Zero-P的问题还在于规格间距设置过大,所设置的规格包括5、6、7、8号等,有相当一部分患者的椎间隙宽度处于两个规格之间,就会出现小一号太松,大一号不能放入的情况;此外,由于人类正常颈椎曲度为前凸,因此,在手术完成减压后,需将患者颈椎的曲度调节至正常的前凸曲度,此时椎间隙表现为前宽后窄,此类情况也会导致传统椎间融合器与椎体前方上下终板之间没有足够的应力接触从而出现应力集中,螺钉松动、内植物周围骨吸收、融合器下沉等并发症。
目前市场上有部分针对上述问题而产生的一系列产品,以可膨胀性的椎间融合器和前方可撑开的椎间融合器为代表,前者在手术完成椎间盘切除减压后,根据患者个体化的终板形态,向可膨胀的椎间融合器中植入骨水泥,使其膨胀后与上下终板相贴合,十到十五分钟后骨水泥凝固,即达到了椎体间成型,但骨水泥的使用会带来一系列的并发症,第一、由于骨水泥是骨的硬化剂,属于液体状态,在注射后可能会通过注入点渗漏,如果漏到椎管会灼伤或者是压迫椎管内神经。第二、注射骨水泥后椎体强度得到加强,如果与相邻椎体强度差异太大的话,容易引起相邻的椎体继发性骨折。第三、骨水泥可能会导致周围的神经组织坏死,因为骨水泥凝固期会出现较高的温度,还可能会出现肺栓塞,因为骨水泥可能会随着血液进入人体内,阻塞肺部,严重者会出现死亡。前方可撑开的椎间融合器为一个可调节的机械化装置,其特点主要是此椎间融合器的前方可撑开使其前方和上下终板前缘相贴附,但终板的中后部的贴合度不足,也在一定程度上留下隐患。
强生公司的Zero-P是ACDF术式的常用的内植物,在进行椎间盘切除以及彻底减压后,将其植入椎间隙,但由于患者椎体两侧的上下终板形态各异(在矢状位上可分为穹窿顶点在前、穹窿顶点在中间以及穹窿顶点在后三种主要形态;在冠状位上可分为凹陷型、平板型和不规则型),所以植入物不能很好地与上下终板相贴附,使得Zero-P只有小部分区域和终板发生接触而受力,就会出现主要是靠几枚螺钉来维持颈椎的曲度的情况,这就会导致螺钉应力集中、螺钉松动、螺钉周围骨吸收以及融合器下沉从而导致翻修的发生。
为解决上述问题的出现,现有手术的操作方式为在减压完成、调节好颈椎曲度过后,用微型磨钻将上下终板打磨平整,使其与即将安装进入人体的Zero-P表面相贴附。尽管磨钻具有上述低震动、安全等优点,但这只是相对于其他颈前路器械而言,如使用不当其仍可导致严重并发症。(1)打滑现象:钻头打滑有可能损伤神经或血管。使用磨钻时,单手或双手持柄部距头端较远的操作均易导致钻头打滑。安全操作方法是双手握持磨钻,一手握柄尾端,一手握近柄头端。握柄尾端的手用以调整磨头方向,并施加向下压力以加深磨骨,握近柄头部的手固定磨头,调节磨骨位置,并略施以上提的力量。另外,持续长时间使用磨钻,因热效应其磨球齿沟内残存骨泥发生碳化,致磨球表面变得光滑,不仅影响磨骨作用,同时也易于出现打滑现象,因此使用时应及时剔除磨球齿沟内的碳化骨泥,保持磨球锋利。据查新显示:2例患者术中磨球打滑刺激脊髓,致患者术中曾出现一过性麻木。(2)热效应:高速磨钻使用过程中会产生发热现象。2例发生皮缘烧伤。为防止术中灼伤皮缘、脊髓或神经根,磨骨的同时应采取保护性持续对钻头冲水措施,以降低磨钻头部温度;柄部用冷盐水棉垫包裹,可吸收柄部热量,避免柄与软组织接触而造成皮缘灼伤。(3)其他:使用磨钻过程中,需助手默契配合及时吸净磨骨碎粒及积血,使手术视野清晰,保证直视下操作,以免钻头过深误伤神经;同时应牵开气管、食管和大血管等,使运转的钻与其保持一定距离以免发生转动性损伤;此外,使用磨钻打磨终板后容易增加打磨处出现异位骨化等风险,由此可知,术中使用磨钻对终板进行打磨是存在较大的风险。
发明内容
针对现有技术的上述不足,本发明提供了一种多单元可调的智能化椎间融合器,可以解决上述所遇到的问题以及可以弥补市面上目前存在产品的不足,使得椎间融合器与上下终板完美契合,避免曲度的改变以及应力过于集中。
为达到上述发明目的,本发明所采用的技术方案为:
提供一种多单元可调的智能化椎间融合器,其包括固定板,固定板的上端为方形结构,固定板的下端为圆弧形结构,固定板上均匀设置有若干调节单元,每个调节单元均包括两个调节块,两个调节块分别设置在固定板的两侧;若干调节块组成的边沿与固定板两侧的边沿相贴合形成一个整体;调节单元上的两个调节块之间的连线与固定板垂直;调节块与固定板之间通过伸缩调节结构连接,固定板内设置有控制器、电池和无线传输模块,伸缩调节结构、电池和无线传输模块均与控制器电连接。
进一步地,伸缩调节结构为直线移动模组,直线移动模组与固定板垂直,调节块面向固定板的侧面上开设有活动槽,直线移动模组伸入活动槽内,且直线移动模组与活动槽间隙设置,活动槽的顶部与直线移动模组的滑块固定连接,活动槽的深度大于直线移动模组的长度,直线移动模组与控制器电连接。
本方案由多个单独可调的调节单元组成,每个单元分别包括两个调节块,调节块可采用钛合金材质,通过直线移动模组可以使各个调节块向两侧终板扩张,由于终板界面形状为凹凸不平的平面,每个调节块伸长的长度不一致,以便于适应终板界面的凹凸不平。滑块带动调节块沿着直线移动模组的长度方向进行伸缩,并且在不使用时,若干个调节块可进行收缩与固定板表面贴合,形成一个整体,方便手术安装。
电池为整个融合器供电,并通过无线传输模块向体外发送融合器的工作信息,方便推测出患者是否佩戴颈托、佩戴颈托的时间以及动态姿势的变化,据此可以为患者提供反馈性的意见,为患者术后的康复提供更为直观和实时的指导。
进一步地,每个调节块上远离固定板的侧面上设置有支撑板,支撑板与调节块之间设置有压力传感器,压力传感器与控制器电连接。
压力传感器用于检测每块调节块支撑在终板界面上产生的压力数据,并将压力数据实时传输给控制器,当调节块与上、下终板相接触并产生足够大的应力以后,感受器将信号传输到控制器,控制器控制直线移动模组停止运动,动作迅速可靠,能够快速并牢固地控制可调节块的运动,使其固定在此位置;其余未抵达上、下终板的调节块继续向两个方向扩张,直至所有的调节块都与终板接触并产生一定的应力作用。此时,每个调节块均与终板紧密结合,避免上述的一系列由于颈椎曲度维持不稳以及螺钉应力过度而导致的问题出现。
进一步地,固定板的上表面设置有电池安装槽,电池安装在电池安装槽内,且电池安装槽的两端设置有电池接触片,电池接触片与控制器电连接,电池安装槽的上表面通过盖板封装。
为融合器供电的电池可取放,方便进行更换,当融合器没电时,通过取下盖板进行更换电池,融合器可循环使用,可有效降低医疗成本。
进一步地,盖板与电池安装槽的上边沿之间设置有密封环。
密封环可有效确保电池安装槽的密封性,避免出现泄漏,对人体造成伤害。
进一步地,每个固定板与调节块相邻的两个面之间设置有定位柱,定位柱的一端固定在调节块上,另一端插入固定板上开设的伸缩孔内,定位柱与伸缩孔活动设置,定位柱与伸缩孔的底部通过弹簧连接。
本方案的定位柱用于对调节块的伸缩进行定位,在调节块伸缩的过程中提供稳定的支撑,同时便于调节块伸出或回收,减少调节块的振动。
进一步地,活动槽的底部设置有滚珠,滚珠活动设置在活动槽底部开设的碗形安装孔内,碗形安装孔的上边沿超出滚珠的二分之一,直线移动模组的下表面沿长度方向开设有一条滚珠槽,滚珠设置在滚珠槽内。
滚珠在滚珠槽内滚动,调节块沿着直线移动模组移动时,滚珠在滚珠槽内滚动,提供滑动支撑,使滑块与直线移动模组能稳定的相对滑动,减少阻力。
进一步地,活动槽的底部设置有伸缩阻尼器,伸缩阻尼器安装在活动槽底部的阻尼器安装槽内,伸缩阻尼器与控制器电连接。
伸缩阻尼器提供阻力,当可调节块与上下、终板产生足够应力接触后,此信号由压力传感器接收,传输到控制器,经过控制器分析后,传出到伸缩阻尼器,伸缩阻尼器进行伸长,为调节块提供阻力,阻尼力大,动作迅速可靠,能够快速并牢固地控制调节块的运动,使其固定在直线移动模组的位置上;当调节块与上、下终板还未产生足够应力接触时,此时伸缩阻尼器为回收状态,不发挥阻尼作用,使得调节块继续向上、下两侧终板移动。
进一步地,调节块通过液压缸与固定板连接,固定块内设置有液压马达,液压缸与液压马达连接,液压马达与控制器电连接。
本方案的调节块还可通过液压缸带动进行伸缩,驱动调节块进行伸缩调节,液压马达提供液压缸的驱动力。
进一步地,调节块与固定板之间通过伸缩杆连接,调节块面向固定板的侧面上开设有活动槽,伸缩杆在活动槽内活动,调节块与固定板之间设置有气囊,且气囊套在伸缩杆外,气囊密封活动槽的开口,活动槽的底部通过管道与气泵连接,气泵设置在固定块内,气泵与控制器电连接。
本方案还可通过气泵向气囊内充气,实现对调节块的调节。当气泵工作时,气囊充气进行膨胀,推动调节块挤压颈椎,使每一块调节块都能具有相同的挤压力去挤压颈椎,使调节单元均与颈椎的上、下终板完美贴合。
本发明的有益效果为:本发明创新性地设计多个可调节单元,通过调节各个可调节单元不同的伸缩高度来填充椎间隙,使各个可调节单元均与上、下终板完美贴合,减少应力集中及颈椎曲度反弓的情况。可以更好的调节颈椎手术节段曲度、增加内植物—终板的接触面积,减少内植物—终板的间隙,从而避免应力集中,减少螺钉松动、内植物周围骨吸收、融合器下沉等并发症。
本发明为多个可调节单元,通过自动控制可以使椎间融合器的各个部分均与上、下终板贴合,而不只是前方贴合,增加了接触面积,使受力更加均匀,减少由于应力过度集中在螺钉上而导致的螺钉松动、螺钉周围骨吸收以及融合器下沉而翻修等情况。可以解决现有技术所遇到的问题以及可以弥补市面上目前存在产品的不足,使得椎间融合器与上、下终板完美契合,避免曲度的改变以及应力过于集中。
附图说明
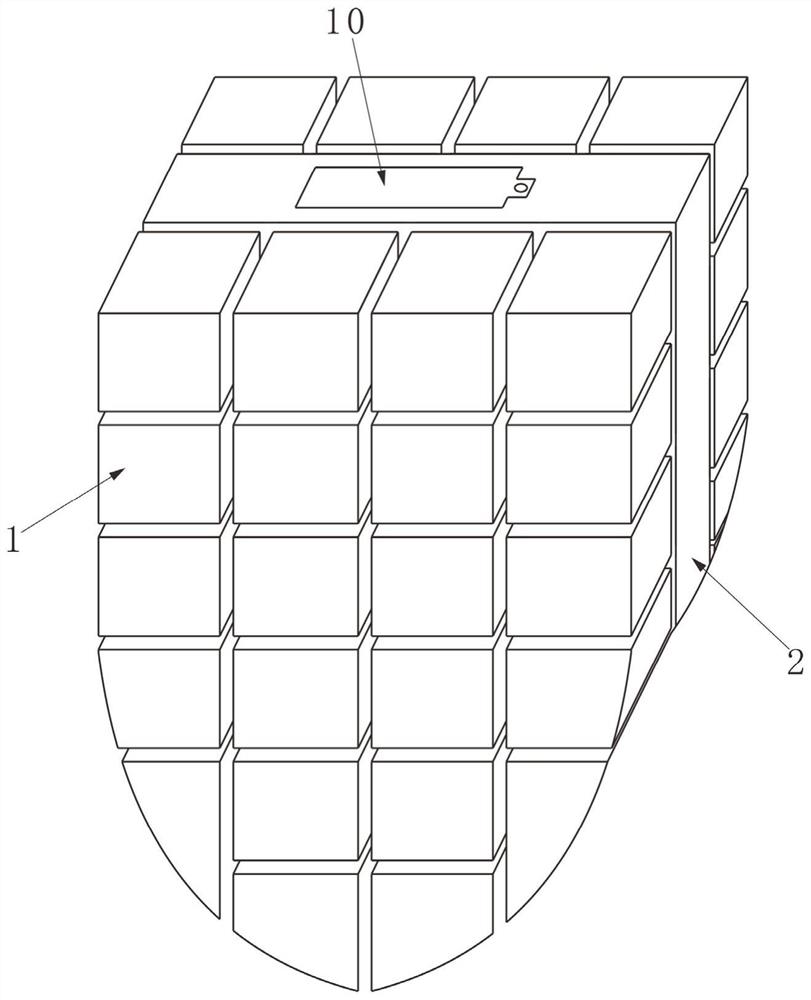
图1为多单元可调的智能化椎间融合器的立体结构图。
图2为可调节单元的侧视图。
图3为可调节单元的俯视图。
图4为调节块的侧视图。
图5为多单元可调的智能化椎间融合器的控制原理框图。
图6为多单元可调的智能化椎间融合器的安装示意图。
图7为可调节单元安装气囊的结构图。
其中,1、调节块,2、固定板,3、直线移动模组,4、支撑板,5、活动槽,6、滑块,7、定位柱,8、伸缩阻尼器,9、滚珠,10、盖板,11、电池安装槽,12、弹簧,13、伸缩孔,14、颈椎,15、伸缩杆,16、气囊。
具体实施方式
下面对本发明的具体实施方式进行描述,以便于本技术领域的技术人员理解本发明,但应该清楚,本发明不限于具体实施方式的范围,对本技术领域的普通技术人员来讲,只要各种变化在所附的权利要求限定和确定的本发明的精神和范围内,这些变化是显而易见的,一切利用本发明构思的发明创造均在保护之列。
如图1至图6所示,本方案的多单元可调的智能化椎间融合器包括固定板2,固定板2的上端为方形结构,固定板2的下端为圆弧形结构,固定板2上均匀设置有若干调节单元,每个调节单元均包括两个调节块1,两个调节块1分别设置在固定板2的两侧;调节块1均通过直线移动模组3与固定板2连接,直线移动模组3与固定板2垂直,若干调节块1组成的边沿与固定板2两侧的边沿相贴合形成一个整体;调节单元上的两个调节块1之间的连线与固定板2垂直。
调节块1面向固定板2的侧面上开设有活动槽5,直线移动模组3伸入活动槽5内,且直线移动模组3与活动槽5间隙设置,活动槽5的顶部与直线移动模组3的滑块6固定连接,活动槽5的深度大于直线移动模组3的长度;固定板2内设置有控制器、电池和无线传输模块,直线移动模组3、电池和无线传输模块均与控制器电连接。
本方案由多个单独可调的调节单元组成,每个单元分别包括两个调节块1,调节块1可采用钛合金材质,通过直线移动模组3可以使各个调节块1向两侧终板扩张,由于终板界面形状为凹凸不平的平面,每个调节块1伸长的长度不一致,以便于适应终板界面的凹凸不平。滑块6带动调节块1沿着直线移动模组3的长度方向进行伸缩,并且在不使用时,若干个调节块1可进行收缩与固定板2表面贴合,形成一个整体,方便手术安装。
电池为整个融合器供电,并通过无线传输模块向体外发送融合器的工作信息,方便推测出患者是否佩戴颈托、佩戴颈托的时间以及动态姿势的变化,据此可以为患者提供反馈性的意见,为患者术后的康复提供更为直观和实时的指导。
本方案的每个调节块1上远离固定板2的侧面上设置有支撑板4,支撑板4与调节块1之间设置有压力传感器,压力传感器与控制器电连接。
压力传感器用于检测每块调节块1支撑在终板界面上产生的压力数据,并将压力数据实时传输给控制器,当调节块1与上、下终板相接触并产生足够大的应力以后,感受器将信号传输到控制器,控制器控制直线移动模组3停止运动,动作迅速可靠,能够快速并牢固地控制可调节块1的运动,使其固定在此位置;其余未抵达上、下终板的调节块1继续向两个方向扩张,直至所有的调节块1都与终板接触并产生一定的应力作用。此时,每个调节块1均与终板紧密结合,避免上述的一系列由于颈椎14曲度维持不稳以及螺钉应力过度而导致的问题出现。
固定板2的上表面设置有电池安装槽11,电池安装在电池安装槽11内,且电池安装槽11的两端设置有电池接触片,电池接触片与控制器电连接,电池安装槽11的上表面通过盖板10封装。
为融合器供电的电池可取放,方便进行更换,当融合器没电时,通过取下盖板10进行更换电池,融合器可循环使用,可有效降低医疗成本。盖板10与电池安装槽11的上边沿之间设置有密封环,密封环可有效确保电池安装槽11的密封性,避免出现泄漏,对人体造成伤害。
每个固定板2与调节块1相邻的两个面之间设置有定位柱7,定位柱7的一端固定在调节块1上,另一端插入固定板2上开设的伸缩孔13内,定位柱7与伸缩孔13活动设置,定位柱7与伸缩孔13的底部通过弹簧12连接。定位柱7用于对调节块1的伸缩进行定位,在调节块1伸缩的过程中提供稳定的支撑,同时便于调节块1伸出或回收,减少调节块1的振动。
活动槽5的底部设置有滚珠9,滚珠9活动设置在活动槽5底部开设的碗形安装孔内,碗形安装孔的上边沿超出滚珠9的二分之一,直线移动模组3的下表面沿长度方向开设有一条滚珠9槽,滚珠9设置在滚珠9槽内;滚珠9在滚珠9槽内滚动,调节块1沿着直线移动模组3移动时,滚珠9在滚珠9槽内滚动,提供滑动支撑,使滑块6与直线移动模组3能稳定的相对滑动,减少阻力。
活动槽5的底部设置有伸缩阻尼器8,伸缩阻尼器8安装在活动槽5底部的阻尼器安装槽内,伸缩阻尼器8与控制器电连接。伸缩阻尼器8提供阻力,当可调节块1与上下、终板产生足够应力接触后,此信号由压力传感器接收,传输到控制器,经过控制器分析后,传出到伸缩阻尼器8,伸缩阻尼器8进行伸长,为调节块1提供阻力,阻尼力大,动作迅速可靠,能够快速并牢固地控制调节块1的运动,使其固定在直线移动模组3的位置上;当调节块1与上、下终板还未产生足够应力接触时,此时伸缩阻尼器8为回收状态,不发挥阻尼作用,使得调节块1继续向上、下两侧终板移动。
控制器的作用在于汇总、处理、分析由压力传感器传入的信息,再将信息发送伸缩阻尼器8以及体外接收信号的外部接收装置。控制器在此装置中的地位类似于人体中大脑中枢的作用。信号发生后,由压力传感器接收,将压力信号即刻传入到控制器,控制器的作用在于汇总、处理、分析信息,再将信息发送给直线移动模组3、伸缩阻尼器8和无线传输模块,做出对应的反应。
本发明创新性地设计多个可调节单元,通过调节各个可调节单元不同的伸缩高度来填充椎间隙,使各个可调节单元均与上、下终板完美贴合,减少应力集中及颈椎14曲度反弓的情况。
本方案的调节块1还可通过液压缸与固定板2连接,固定块2内设置有液压马达,液压缸与液压马达连接,液压马达与控制器电连接。调节块1还可通过液压缸带动进行伸缩,驱动调节块1进行伸缩调节,液压马达提供液压缸的驱动力。液压马达与液压缸之间设置压力阀、流量阀和方向阀等,它们的作用是根据需要无级调节液压系统,对液压系统中工作液体的压力、流量和流向进行调节控制。
如图7所示,调节块1与固定板2之间通过伸缩杆15连接,调节块1面向固定板2的侧面上开设有活动槽5,伸缩杆15在活动槽5内活动,调节块1与固定板2之间设置有气囊16,且气囊16套在伸缩杆15外,气囊16密封活动槽5的开口,活动槽5的底部通过管道与气泵连接,气泵设置在固定块2内,气泵与控制器电连接。
本方案还可通过气泵向气囊16内充气,实现对调节块1的调节。当气泵工作时,气囊16充气进行膨胀,推动调节块1挤压颈椎14,使每一块调节块1都能具有相同的挤压力去挤压颈椎14,使调节单元均与颈椎14的上、下终板完美贴合。
本发明为多个可调节单元,通过自动控制可以使椎间融合器的各个部分均与上、下终板贴合,而不只是前方贴合,增加了接触面积,使受力更加均匀,减少由于应力过度集中在螺钉上而导致的螺钉松动、螺钉周围骨吸收以及融合器下沉而翻修等情况。可以解决现有技术所遇到的问题以及可以弥补市面上目前存在产品的不足,使得椎间融合器与上、下终板完美契合,避免曲度的改变以及应力过于集中。
本方案可以更好的调节颈椎手术节段曲度、增加内植物—终板的接触面积,减少内植物—终板的间隙,从而避免应力集中,减少螺钉松动、内植物周围骨吸收、融合器下沉等并发症。
- 一种多单元可调的智能化椎间融合器
- 一种多单元高度可调椎间融合器