外界识别装置
文献发布时间:2023-06-19 11:55:48
技术领域
本发明涉及一种外界识别装置。
背景技术
以往,使用LiDAR(Laser imaging Detection AND Ranging,激光成像探测与测距)传感器等测距传感器来检测存在于周边的物体和道路上的白线的位置等的外界识别装置为人所知。测距传感器是通过呈脉冲状照射激光并测量到接收到来自物体的反射光为止的时间间隔来测量到物体的距离。在该情况下,测距传感器除了按每一照射角度设置多个激光元件以外,可以通过逐次改变激光元件的照射角度而利用激光的反射光来检测三维空间的物体的位置。
要将从测距传感器得到的距离信息转换为三维空间的坐标信号,通常是根据激光的照射角度和测距传感器自身的已知的设置姿态的信息、使用三角函数等而通过计算来求出。因此,若测距传感器的设置姿态与设计时(出厂时)的设置姿态不一致,则从距离信息转换得到的三维坐标的坐标信号会与现实的物体的位置不一致而具有误差。考虑测距传感器的设置姿态因经年劣化等造成的变化或者冲击等外部因素而偏离设计值这一情况,设想因偏差增大而对外界识别装置的识别性能产生不良影响这一情况。
作为解决该问题的外界识别装置,例如有从测距传感器扫描照射激光来推断路面、根据路面平面与预先既定的基准平面的差分来算出观测点的校正量的技术(例如参考专利文献1)。专利文献1记载的外界识别装置利用从测距传感器的发光元件起到起伏较少的平面结构为止的距离没有急剧变化这一情况来检测路面。采用距离的变化缓和的观测点作为路面候选点,根据利用路面候选点推断出的路面平面与预先定下的基准平面的偏差来算出校正量。继而,利用校正量来修正观测点的相对的位置信息,由此抑制外界识别装置的识别性能的降低。
现有技术文献
专利文献
专利文献1:日本专利特开2015-75382号公报
发明内容
发明要解决的问题
然而,专利文献1记载的外界识别装置利用的是平面结构的观测点的距离的变化较小这一情况,因此不仅是路面,建筑物的墙壁、卡车货箱的侧板等具有平面结构的物体的观测点也会被用作路面候选点。因此,根据路面候选点推断出的路面平面包含大量误差,无法充分抑制测距传感器的设置姿态的变化造成的外界识别装置的识别性能的降低。此外,专利文献1记载的外界识别装置是以具有机械转动机构的扫描照射式测距传感器为前提,无法运用于这以外的面阵闪光式测距传感器。
本发明要解决所述问题,其目的在于提供一种不论测距传感器的照射方式如何都能抑制测距传感器的设置位置的变化造成的识别性能的降低的外界识别装置。
解决问题的技术手段
本发明的一形态的外界识别装置是一种借助从车辆上设置的测距传感器照射的激光来识别所述车辆周边的外界的外界识别装置,其特征在于,具备:存储部,其存储有三维的既定坐标系中的所述测距传感器的设置姿态的姿态信息;坐标信号转换部,其根据所述姿态信息将从所述测距传感器得到的多个观测点在所述既定坐标系中转换为多个三维坐标信号;路面候选点提取部,其根据各三维坐标信号的高度分量从所述多个三维坐标信号中提取表示路面的多个路面候选点;路面平面推断部,其根据所述多个路面候选点来推断路面平面;以及校正量算出部,其根据基于所述既定坐标系设定的基准平面和所述路面平面来算出所述姿态信息的校正量。
发明的效果
根据本发明,在实际环境下算出测距传感器的设置姿态的校正量,不论测距传感器的照射方式如何都能充分抑制测距传感器的设置姿态的变化造成的外界识别装置的识别性能的降低。此外,测距传感器的方式也不受限。根据本说明书的记述、附图,将明确本发明相关的更多特征。此外,上述以外的课题、构成及效果将通过以下实施方式的说明来加以明确。
附图说明
图1为本实施方式的车辆上部署的外界识别系统的概略图。
图2为本实施方式的LiDAR坐标系的说明图。
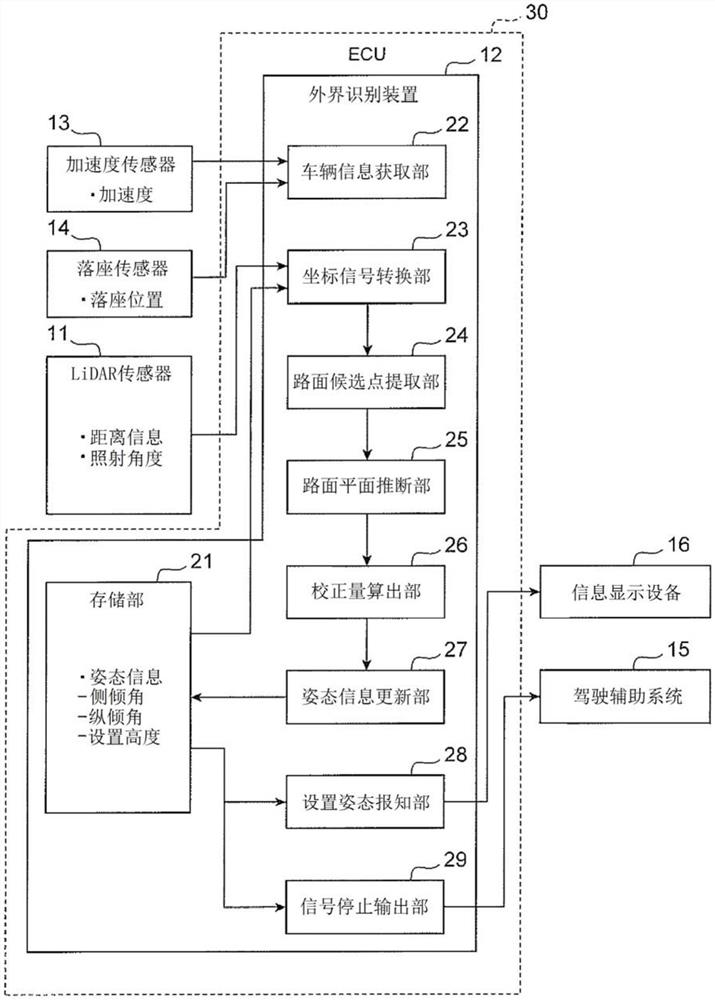
图3为表示本实施方式的外界识别系统的系统构成的框图。
图4为本实施方式的LiDAR传感器的姿态信息的更新处理的流程图。
图5为表示本实施方式的姿态信息有误差的情况下的三维坐标信号的一例的图。
图6为表示本实施方式的路面候选点的提取处理的一例的图。
图7为表示本实施方式的路面平面的推断处理的一例的图。
图8为表示本实施方式的校正量的算出处理的一例的图。
图9为表示本实施方式的姿态信息没有误差的情况下的三维坐标信号的一例的图。
具体实施方式
下面,参考附图,对本实施方式的外界识别系统进行说明。图1为本实施方式的车辆上部署的外界识别系统的概略图。图1所示的外界识别系统具备设置在车辆1的保险杠中的前后一对LiDAR传感器(测距传感器)11和设置在车辆1内部的外界识别装置12。在出厂时的状态下,以一对LiDAR传感器11的光轴与车辆的铅垂方向成直角、与车辆的前后方向平行的方式设置在车辆1上。出厂时的LiDAR传感器11的设置姿态的角度和高度信息以初始设计值的形式存储在外界识别装置12中。再者,本实施方式中是在车辆1的保险杠的高度上前后各设置1个LiDAR传感器11,但LiDAR传感器11的设置位置和设置个数可任意设计。此外,设置姿态的初始设计值也可以设置任意角度和高度。
在该外界识别系统中,从LiDAR传感器11照射激光,根据LiDAR传感器11的已知的设置姿态来校正激光的反射点即观测点而识别车辆周边的外界。此时,外界识别装置12中以已知的设置姿态的形式存储有出厂时的设置姿态的姿态信息,而在LiDAR传感器11相较于出厂时的设置姿态而言发生了变化的情况下,由外界识别装置12识别的环境与现实的环境会产生误差。即,外界识别装置12虽然可以根据LiDAR传感器11的观测结果来识别车辆1的周边环境,但无法识别LiDAR传感器11的现实的设置姿态。因此,有尽管LiDAR传感器11的设置姿态已发生了偏移、外界识别装置12却将LiDAR传感器11的观测结果误识别为正确之虞。
通常,要矫正LiDAR传感器11的设置姿态就需要经销商的测试环境。然而,只是为了矫正LiDAR传感器11的设置姿态就把车辆1放到经销商那儿是不现实的。因此,在本实施方式的外界识别装置12中,根据LiDAR传感器11观测到的路面的观测点存在于车辆1的接地面即高度0[m]附近这一假定来推断路面。继而,根据正确的设置姿态的LiDAR传感器11观测到的路面的倾斜与LiDAR传感器11的光轴平行这一假定来算出相对于路面的LiDAR传感器11的姿态信息的校正量。如此,在实际环境下也尽可能排除路面以外的观测点的影响来推断路面,使外界识别装置12根据推断出的路面与实际的路面的偏差来识别LiDAR传感器11的现实的设置姿态。
下面,对本实施方式的外界识别系统的详细构成进行说明。以下,为了说明本实施方式,以既定的三维坐标系即LiDAR坐标系(既定坐标系)的形式像以下那样定义车辆上设置的LiDAR传感器11的XYZ正交坐标系的坐标轴。LiDAR坐标系是在测试环境等之下预先规定的坐标系,即便LiDAR传感器11的设置姿态发生变化也不会改变。如图2所示,以车辆1的行驶方向即前后方向为X轴,将前方定义为X轴的正方向,将后方定义为X轴的负方向。以车辆1的车宽方向即左右方向为Y轴,将左方定义为Y轴的正方向,将右方定义为Y轴的负方向。以车辆1的上下方向为Z轴,将上方定义为Z轴的正方向,将下方定义为Z轴的负方向。坐标轴的原点设为LiDAR传感器11的光源所处的点,多个LiDAR传感器11则针对各LiDAR传感器11中的每一个而具有坐标轴。
关于LiDAR传感器11的光轴的角度,将以Y轴为转轴的角度定义为纵倾角,将以X轴为转轴的角度定义为侧倾角,将以Z轴为转轴的角度定义为横摆角。纵倾角中,将Z轴的正方向定义为0度,将X轴的正方向定义为90度。侧倾角中,将Z轴的正方向定义为0度,将Y轴的正方向定义为90度。横摆角中,将X轴的正方向定义为0度,将Y轴的正方向定义为90度。根据以上内容,以图1所示的LiDAR传感器11的设置姿态为例,前方的LiDAR传感器11的光轴的角度为纵倾角90度、侧倾角0度、横摆角0度,后方的LiDAR传感器11为纵倾角270度、侧倾角0度、横摆角180度。像以上那样定义的LiDAR坐标轴为一例,当然也可借助不同坐标轴来定义。
图3为表示本实施方式的外界识别系统的系统构成的框图。外界识别系统中设置有根据LiDAR传感器11的观测结果来识别车辆1的周边环境的外界识别装置12。外界识别装置12上连接有LiDAR传感器11、加速度传感器13以及落座传感器14。LiDAR传感器11从发光元件照射激光,根据到受光元件接收到来自物体的反射光为止的时间而按每一照射角度来检测到物体的距离信息并输出到外界识别装置12。再者,LiDAR传感器11的内部结构、感测方式不作限定。一对LiDAR传感器11可为借助马达机构使发光元件和受光元件转动的扫描照射式LiDAR传感器,也可为不具有马达机构的面阵闪光式LiDAR传感器。此外,一对LiDAR传感器11的照射方式也可不同。
加速度传感器13检测车辆1的加速度并输出到外界识别装置12。加速度传感器13用于检测车辆1为行驶中、停车中以及缓行中的哪一状态。落座传感器14检测搭乘者有没有坐在座位上并输出到外界识别装置12。落座传感器14是针对座位的每一落座位置设置的,用于检测搭乘者的落座位置。此外,外界识别装置12上连接有驾驶辅助系统15和信息显示设备16。驾驶辅助系统15使用外界识别装置12的识别结果来实施包括自动驾驶功能在内的各种驾驶辅助。再者,驾驶辅助系统15可为单个驾驶辅助系统,也可为多个驾驶辅助系统。信息显示设备16是具有向驾驶员呈现各种信息的液晶画面或LED灯具的设备。信息显示设备16用于向驾驶员提供LiDAR传感器11的现实的设置姿态。
外界识别装置12中设置有存储部21、车辆信息获取部22、坐标信号转换部23、路面候选点提取部24、路面平面推断部25、校正量算出部26、姿态信息更新部27、设置姿态报知部28以及停止信号输出部29。存储部21中存储有既定的LiDAR坐标系中的LiDAR传感器11的设置姿态的姿态信息。存储部21中存储有纵倾角、侧倾角、设置高度等作为LiDAR传感器11的姿态信息的参数。车辆信息获取部22从加速度传感器13获取车辆1的加速度而且从落座传感器14获取车辆1的搭乘者的落座位置。车辆1的行驶状态以及搭乘者的落座位置与LiDAR传感器11的姿态信息关联存储在存储部21中,详情于后文叙述。
坐标信号转换部23根据姿态信息将从LiDAR传感器11得到的多个观测点在LiDAR坐标系中转换为多个三维坐标信号102(参考图5)。在该情况下,根据从存储部21读出的姿态信息的各参数将根据LiDAR传感器11的距离信息及照射角度算出的观测点转换为考虑了LiDAR传感器11的设置姿态的三维坐标信号102。但是,姿态信息所示的设置姿态未必与LiDAR传感器11的现实的设置姿态一致。例如,在LiDAR传感器11的设置姿态相较于出厂时而言发生了变化的情况下,外界识别装置12的基于三维坐标信号102的识别结果就会产生误差。
路面候选点提取部24根据各三维坐标信号102的高度分量从多个三维坐标信号102中提取表示实际路面32的多个路面候选点104(参考图6)。在该情况下,根据LiDAR坐标系来设定成为车辆1的接地面的高度0[m]的基准平面106,提取三维坐标信号102的高度分量包含在以基准平面106为基准的规定高度范围内的三维坐标信号102作为多个路面候选点104。再者,基准平面106例如是在测试环境下以与车辆1接触地面的接地面一致的方式预先设定的。路面平面推断部25根据多个路面候选点104来推断路面平面105(参考图7)。在该情况下,推断从路面平面105起到各路面候选点104为止的距离的总和最小这样的路面平面105。如此,通过使用车辆1的接地面附近的路面候选点104来推断路面平面105,在实际环境下也能尽可能排除表示路面以外的物体的三维坐标信号的影响来推断路面。
校正量算出部26根据基准平面106和路面平面105来算出存储部21中存储的姿态信息的校正量(参考图8)。在该情况下,根据基准平面106与路面平面105的偏差来算出姿态信息的校正量。姿态信息更新部27根据校正量来校正LiDAR传感器11的姿态信息,由此对存储部21中存储的姿态信息进行更新。外界识别装置12可以根据更新后的姿态信息来识别LiDAR传感器11的现实的设置姿态。因此,即便在LiDAR传感器11的设置姿态发生了变化的情况下,也能生成考虑了LiDAR传感器11的现实的设置姿态的三维坐标信号而从外界识别装置12向驾驶辅助系统15输出正确的识别结果。
在判断姿态信息的参数中的至少1方在预先定下的容许范围外时,设置姿态报知部28向驾驶员报知LiDAR传感器11的设置姿态的异常。在LiDAR传感器11的设置姿态发生了大幅变化时,从设置姿态报知部28向信息显示设备16输出表示设置姿态的异常的信号,可以向驾驶员报知外界识别装置12的识别功能已降低这一情况。在判断姿态信息的参数中的至少1方在预先定下的容许范围外时,停止信号输出部29向驾驶辅助系统15输出使利用外界识别的驾驶辅助停止的停止信号。在LiDAR传感器11的设置姿态发生了大幅变化时,从停止信号输出部29向驾驶辅助系统15输出驾驶辅助的停止信号,可以让驾驶辅助系统15停止利用外界识别装置12的识别结果。
外界识别装置12的各部例如由ECU(Electronic Control Unit)30构成。ECU 30中装有处理器及存储器,通过由处理器读出并执行存储器中存放的程序来实施外界识别装置12的各种处理。作为处理器,例如使用CPU(Central Processing Unit)、GPU(GraphicsProcessing Unit)等。此外,存储器根据用途而由ROM(Read Only Memory)、RAM(RandomAccess Memory)、NVRAM(Non-Volatile RAM)等当中的一种或多种记录介质构成。存储部21可由ECU 30内的NVRAM构成,也可由外部的非易失性存储器构成。
下面,作为本实施方式,按照图4所示的LiDAR传感器的姿态信息的更新处理的次序来进行说明。图4为本实施方式的LiDAR传感器的姿态信息的更新处理的流程图。
当从LiDAR传感器11照射激光时,由ECU 30从LiDAR传感器11获取表示观测点的距离信息及照射角度(步骤S01)。接着,由ECU 30根据距离信息和照射角度算出LiDAR坐标系的观测点的三维坐标(步骤S02)。在该情况下,若将发光元件起到物体为止的距离设为L[m]、将激光的照射角度的纵倾角设为P[rad]、将横摆角设为Y[rad],则借助下式(1)算出观测点的三维坐标(x,y,z)。通过按每一照射角度将距离信息转换为观测点,可以获得多个观测点。
[式1]
接着,由ECU 30从存储部21中读出LiDAR传感器11的姿态信息,并将各观测点的三维坐标转换为考虑了LiDAR传感器11的设置姿态的三维坐标信号的三维坐标(步骤S03)。在该情况下,若将纵倾角设为Ps[rad]、将侧倾角设为Rs[rad]、将横摆角设为Ys[rad]、将路面32起到LiDAR传感器11为止的设置高度的补偿量设为Oz[m]作为LiDAR传感器11的姿态信息,则借助下式(2)算出转换观测点的三维坐标(x,y,z)得到的三维坐标信号的三维坐标(xs,ys,zs)。通过根据LiDAR传感器11的姿态信息对多个观测点进行转换,可以获得多个三维坐标信号。
[式2]
在本实施方式中,由于存储部21中存储的姿态信息与LiDAR传感器11的现实的设置姿态不对应,因此考虑了LiDAR传感器11的设置姿态的三维坐标信号102中产生了误差(参考图5)。即,LiDAR传感器11的现实的设置姿态的姿态信息没有反映到存储部21(参考图3)中,因此原本表示物体31的侧面和路面32的三维坐标信号102出现在离开物体31的侧面和路面32的三维坐标位置上,无法准确识别车辆1的周边环境。再者,若存储部21中存储的姿态信息与LiDAR传感器11的现实的设置姿态相对应,则是获得表示物体31和路面32的三维坐标信号101。
接着,由ECU 30从多个三维坐标信号102中提取路面推断用的路面候选点104(步骤S04)。检测到路面32的点和检测到路面32以外的物体31的点都包含在三维坐标信号102中,因此提取检测到路面32的点作为路面候选点104(参考图6)。通过将多个路面候选点104用于路面平面105(参考图7)的推断,路面平面105的推断精度得到改善。在本实施方式中,在三维坐标信号102的Z轴方向的高度分量包含在以车辆1的接地面即基准平面106为基准的规定的高度范围内的情况下,提取为路面候选点104。在该情况下,将三维坐标信号102的Z轴坐标值转换为以基准平面106为基准的坐标值并判定是否包含在规定的高度范围内。再者,基准平面106是通过在LiDAR坐标系中指定Z轴坐标值来设定的,例如根据LiDAR坐标系的原点起到车辆1的接地面(路面)为止的距离来预先设定。
图6展示了以水平的路面32为基准平面106的情况下的例子。在该例中,在将路面候选点104的提取处理用的上限阈值设为+h、将下限阈值设为-h时,提取虚线所示的高度范围内的黑圆点的三维坐标信号作为路面候选点104。再者,脱离了高度范围的白圆点的三维坐标信号103被抛弃。路面候选点104的提取处理用的高度范围的设定可酌情变更。例如,上限阈值及下限阈值的绝对值也可不同,也可仅设定上限阈值及下限阈值中的任一方。此外,高度范围也可动态地变更。例如,在周围的物体31较多的地方,可缩窄高度范围来减小表示物体31的三维坐标信号的影响,在周围的物体31较少的地方,可加宽高度范围来提取大量路面候选点104。
接着,由ECU 30判定路面候选点104是否在既定数量以上(步骤S05)。在路面候选点104少于既定数量的情况下(步骤S05中为否),认为路面平面105(参考图7)的推断时噪声的影响较大,中止设置姿态的更新处理。另一方面,在路面候选点104为既定数量以上的情况下(步骤S05中为是),由ECU 30根据路面候选点104来推断路面平面105(步骤S06)。路面平面105在正交坐标系中以下式(3)的数式模型加以表示(参考图8)。通过求式(3)的参数(a、b、c)来推断路面平面105。再者,参数a对应于纵倾角,参数b对应于侧倾角,参数c对应于设置高度。
[式3]
z=ax+by+c···(3)
在该情况下,虽然使用路面候选点104来推断路面平面105的参数(a、b、c),但路面候选点104的观测噪声、路面的表面状态所引起的路面候选点104的偏差等会导致推断精度变差。为了减少路面候选点104的观测噪声和偏差所引起的误差,使用下式(4)来算出各路面候选点104的Z轴的值与对应于各路面候选点104的路面平面105的Z轴的值的差的平方和最少这样的系数。式(4)的(x,y,z)为路面候选点的三维坐标。使用任意解法来求解通过使用所有路面候选点104计算式(4)中的各要素而获得的方程组,由此算出参数(a、b、c)。再者,式(4)中的Σ意指总和。作为方程组的解法,例如可使用刮去法或克莱姆公式。
[式4]
接着,由ECU 30使用路面平面105的参数(a、b、c)来算出姿态信息的校正量(δx、δy、δz)(步骤S07)。以路面平面105的倾斜与基准平面106的倾斜的偏差的形式算出角度的校正量(δx、δy)。为此,借助下式(5)将路面平面105的参数(a、b)转换为角度(θa、θb),之后借助下式(6)算出角度(θa、θb)与基准平面106的倾斜的偏差(参考图8)。这次是将基准平面106设为水平面,因此基准平面106的倾斜为(0、0)。由此,算出设置姿态的纵倾角及侧倾角的校正量(δx、δy)。高度的校正量δz则直接使用路面平面105的参数c。
[式5]
[式6]
接着,由ECU 30判定各校正量(δx、δy、δz)是否分别在既定范围内(步骤S08)。在校正量(δx、δy、δz)中的任一方脱离既定范围的情况下(步骤S08中为否),判断为瞬间性的车辆姿态的变化或者冲击等的影响造成的短暂性噪声,中止LiDAR传感器11的姿态信息的更新处理。另一方面,在校正量(δx、δy、δz)都在既定范围内的情况下(步骤S08中为是),由ECU30将校正量(δx、δy、δz)反映至LiDAR传感器11的姿态信息来更新存储部21中存储的姿态信息(步骤S09)。若将设置姿态的纵倾角设为Ps[rad]、将侧倾角设为Rs[rad]、将设置高度的补偿量设为Oz[m],则借助下式(7)来更新LiDAR传感器11的姿态信息。
[式7]
如此一来,在存储部21中存储表示LiDAR传感器11的现实的设置姿态的姿态信息。从LiDAR传感器11得到的各观测点被转换为与现实的设置姿态相应的三维坐标信号101,因此可以根据三维坐标信号来准确地识别路面32、物体31等车辆1的周边环境(参考图9)。再者,步骤S04的路面候选点的规定的高度范围、步骤S05的路面候选点的既定数量、步骤S08的校正量的既定范围是根据要求的精度来使用利用过去数据等以实验方式、经验方式或理论方式求出的值。
在上述的软件上的姿态信息的校正处理中,能够考虑LiDAR传感器11的现实的设置姿态来进行外界识别,但不是重新正确地设置LiDAR传感器11的设置姿态。在LiDAR传感器11的设置姿态发生了大幅变化的情况下,外界识别装置12无法获得原本的性能。例如,在LiDAR传感器11的设置角度朝下发生了大幅变化的情况下,观测区域的上限降低,在设想的观测区域内检测不到物体。此外,在LiDAR传感器11中设定有高分辨率的观测区域和低分辨率的观测区域的情况下,以高分辨率的观测区域匹配重要部位的方式将LiDAR传感器11设置在车辆1上。然而,当LiDAR传感器11的设置姿态发生大幅变化时,高分辨率的观测区域离开重要部位而导致重要部位的识别精度降低。
因此,在本实施方式中,在校正后的姿态信息的参数(Ps、Rs、Oz)中的至少1个在预先定下的容许范围外时,设置姿态报知部28向驾驶员报知LiDAR传感器11的设置姿态的异常,而且停止信号输出部29向驾驶辅助系统15输出驾驶辅助的停止信号。由此,能让驾驶员知晓由于LiDAR传感器11的设置姿态的影响已导致外界识别装置12的识别精度降低这一情况来督促对LiDAR传感器11进行维护,同时让驾驶辅助系统15停止利用精度较低的识别结果的驾驶辅助。例如可使LED灯具等闪烁或者在信息显示设备上显示图像或消息而让驾驶员知晓设置姿态的异常。此外,LiDAR传感器11也可经由具有多个调整轴的调整机构(未图示)设置在车辆1上,借助调整机构而根据校正量(δx、δy、δz)将LiDAR传感器11的现实的设置姿态调整为正确的设置姿态。
LiDAR传感器11的设置姿态不仅会因经年劣化和冲击等而发生变化,在由于车辆1的加速度的原因而使得车辆1整体倾斜时也会发生变化。因此,在本实施方式中,存储部21可分开存储车辆1的行驶中校正后的姿态信息与车辆1的停车中或缓行中校正后的姿态信息。可以区分仅在车辆1的行驶中发生的LiDAR传感器11的设置姿态的暂时性变化与在车辆1停车中或缓行中也会发生的LiDAR传感器11的设置姿态的稳定的变化。在LiDAR传感器11的姿态信息的更新处理的开始时,由ECU 30根据来自加速度传感器13的加速度来判断行驶中、停车中、缓行中,根据行驶状态将姿态信息存储至存储部21。由此,可以使用符合行驶状态的姿态信息来识别车辆1的周边环境。此外,即便在LiDAR传感器11的设置姿态发生了大幅变化的情况下,若是设置姿态的暂时性变化,则也能让驾驶员认识到设置姿态并没有异常。
LiDAR传感器11的设置姿态在由于搭乘者的落座状况而使得车辆1整体倾斜时也会发生变化。因此,在本实施方式中,存储部21可将座位上的搭乘者的落座位置与姿态信息加以关联来存储。可以根据乘车人数和落座状况来区分LiDAR传感器11的设置姿态的变化。在LiDAR传感器11的姿态信息的更新处理的开始时,由ECU 30根据来自落座传感器14的落座信息来判断搭乘者的落座位置,根据落座位置将姿态信息存储至存储部21。由此,可以使用符合座位上的落座状况的姿态信息来识别车辆1的周边环境。此外,即便在LiDAR传感器11的设置姿态发生了大幅变化的情况下,若只是特定的落座状况下设置姿态才发生变化,则也能让驾驶员认识到设置姿态并没有异常。
此外,可根据车辆1的位置信息来决定LiDAR传感器11的姿态信息的更新处理的实施时刻。在该情况下,使用从车辆1的GPS(Global Positioning System)功能得到的车辆1的位置信息和登记有能大量获取路面候选点104的有利条件地点的地图数据,在车辆1到达了有利条件地点的时刻实施LiDAR传感器11的姿态信息的更新处理。作为有利条件地点,例如可列举停车场、平坦的干线道路等。有利条件地点可由系统的设计者预先设定在地图数据上,也可由车辆1的搭乘者之后设定在地图数据上。也可在地图数据上设定道路的规定区间作为有利条件地点。在从道路的开始区间通过结束区间的期间内提取路面候选点104。
进而,在本实施方式中,由于在车辆1前后设置有LiDAR传感器11,因此能提高路面平面105的推断精度。此外,通过利用前方的LiDAR传感器11和后方的LiDAR传感器11的识别结果来推断路面32的坡度的变化,在坡度的变化较大的地方限制LiDAR传感器11的姿态信息的更新处理。例如,在根据从前方的LiDAR传感器11得到的观测点在车辆前方识别出有坡度的路面、根据从后方的LiDAR传感器11得到的观测点在车辆后方识别出水平的路面时,限制姿态信息的更新处理。
如上所述,在本实施方式的外界识别装置12中,仅提取从LiDAR传感器11的观测结果获得的多个三维坐标信号102当中表示路面32的路面候选点104。因此,在实际环境下也能推断路面平面105而不受表示路面32以外的三维坐标信号102的影响,通过对该路面平面105与预先定下的基准平面106进行比较,可以算出LiDAR传感器11的姿态信息的校正量。因此,不论测距传感器的照射方式如何都能充分抑制测距传感器的设置姿态的变化造成的外界识别装置的识别性能的降低。
再者,在上述实施方式中,是设为LiDAR传感器11的姿态信息中包含从路面32起到LiDAR传感器11为止的设置高度、纵倾角以及侧倾角的构成,但并不限定于该构成。LiDAR传感器11的姿态信息中只要包含LiDAR传感器11的设置高度、纵倾角以及侧倾角中的至少1方即可。此外,也可根据LiDAR传感器11的设置位置酌情变更设置信息,例如,设置信息中除了设置高度、纵倾角、侧倾角以外还可包含横摆角。
此外,在上述实施方式中,是设为由姿态信息更新部27对存储部21中存储的LiDAR传感器11的姿态信息进行更新的构成,但并不限定于该构成。也可在存储部21中存储姿态信息的初始设计值和校正量而不存储LiDAR传感器11的校正后的姿态信息。
如上所述,本实施方式记载的外界识别装置(12)是一种借助从车辆(1)上设置的测距传感器(LiDAR传感器11)照射的激光来识别车辆周边的外界的外界识别装置(12),其特征在于,具备:存储部(21),其存储有三维的既定坐标系中的测距传感器(LiDAR传感器11)的设置姿态的姿态信息;坐标信号转换部(23),其根据姿态信息将从测距传感器(LiDAR传感器11)得到的多个观测点在既定坐标系中转换为多个三维坐标信号(102);路面候选点提取部(24),其根据各三维坐标信号(102)的高度分量从多个三维坐标信号(102)中提取表示路面(32)的多个路面候选点(104);路面平面推断部(25),其根据多个路面候选点(104)来推断路面平面(105);以及校正量算出部(26),其根据基于既定坐标系设定的基准平面(106)和路面平面(105)来算出姿态信息的校正量。
根据该构成,仅提取从测距传感器(LiDAR传感器11)的观测结果获得的多个三维坐标信号(102)当中表示路面(32)的路面候选点(104)。因此,在实际环境下也能推断路面平面(105)而不受表示路面(32)以外的三维坐标信号(102)的影响,通过对该路面平面(105)与预先定下的基准平面(106)进行比较,可以算出测距传感器(LiDAR传感器11)的姿态信息的校正量。因此,不论测距传感器(LiDAR传感器11)的照射方式如何都能充分抑制测距传感器(LiDAR传感器11)的设置姿态的变化造成的外界识别装置(12)的识别性能的降低。
在本实施方式记载的外界识别装置(12)中,配备有姿态信息更新部(27),所述姿态信息更新部(27)通过根据校正量对姿态信息进行校正来更新存储部(21)中存储的姿态信息。根据该构成,可以考虑测距传感器(LiDAR传感器11)的现实的设置姿态来识别车辆周边的外界。
在本实施方式记载的外界识别装置(12)中,姿态信息包括从路面(32)起到测距传感器(LiDAR传感器11)为止的设置高度、以车辆(1)的车宽方向为转轴的纵倾角、以及以车辆(1)的行驶方向为转轴的侧倾角中的至少1方。根据该构成,可以校正设置高度、纵倾角、侧倾角中的至少1方作为姿态信息。
在本实施方式记载的外界识别装置(12)中,路面候选点提取部(24)提取三维坐标信号(102)的高度分量包含在以基准平面(106)为基准的规定的高度范围内的三维坐标信号(102)作为多个路面候选点(104)。根据该构成,在实际环境下也能尽可能排除表示路面(32)以外的物体(31)的三维坐标信号(102)的影响来推断路面(32)。
在本实施方式记载的外界识别装置(12)中,路面平面推断部(25)推断从路面平面(105)起到各路面候选点(104)为止的距离的总和最小这样的该路面平面(105)。根据该构成,可以减少路面候选点(104)的观测噪声或偏差造成的误差。
在本实施方式记载的外界识别装置(12)中,存储部(21)分开存储行驶中校正后的姿态信息与停车中或缓行中校正后的姿态信息。根据该构成,可以区分仅在车辆(1)的行驶中发生的测距传感器(LiDAR传感器11)的设置姿态的暂时性变化与在车辆(1)的停车中或缓行中也会发生的测距传感器(LiDAR传感器11)的设置姿态的稳定的变化。
在本实施方式记载的外界识别装置(12)中,在车辆(1)的座位中设置检测搭乘者的落座位置的落座传感器(14),存储部(21)将搭乘者的落座位置与姿态信息加以关联来存储。根据该构成,可以根据乘车人数、落座状况来区分测距传感器(LiDAR传感器11)的设置姿态的变化。
在本实施方式记载的外界识别装置(12)中,配备有设置姿态报知部(28),在姿态信息的参数中的至少1方在预先定下的容许范围外时,所述设置姿态报知部(28)向驾驶员报知测距传感器(LiDAR传感器11)的设置姿态的异常。根据该构成,在测距传感器发生了大幅变化时,可以向驾驶员报知外界识别装置(12)的识别功能已降低这一情况。
在本实施方式记载的外界识别装置(12)中,配备有停止信号输出部(29),在姿态信息的参数中的至少1方在预先定下的容许范围外时,所述停止信号输出部(29)向驾驶辅助系统(15)输出使利用外界识别的驾驶辅助停止的停止信号。根据该构成,在测距传感器发生了大幅变化的情况下,可以让驾驶辅助系统(15)停止利用外界识别装置(12)的识别结果。
在本实施方式记载的外界识别装置(12)中,测距传感器(LiDAR传感器11)是设置在车辆(1)的多个部位的多个测距传感器。根据该构成,可以借助多个测距传感器(LiDAR传感器11)来提高路面平面(105)的推断精度。
以上,对本发明的实施方式进行了详细叙述,但本发明并不限定于所述实施方式,可以在不脱离权利要求书记载的本发明的精神的范围内进行各种设计变更。例如,所述实施方式是为了以易于理解的方式说明本发明所作的详细说明,并非一定限定于具备说明过的所有构成。此外,可以将某一实施方式的构成的一部分替换为其他实施方式的构成,此外,也可以对某一实施方式的构成加入其他实施方式的构成。进而,可以对各实施方式的构成的一部分进行其他构成的追加、删除、替换。
符号说明
1…车辆、11…LiDAR传感器(测距传感器)、12…外界识别装置、14…落座传感器、15…驾驶辅助系统、21…存储部、23…坐标信号转换部、24…路面候选点提取部、25…路面平面推断部、26…校正量算出部、27…姿态信息更新部、28…设置姿态报知部、29…停止信号输出部、32…路面、104…路面候选点、105…路面平面、106…基准平面。
- 图像处理装置、外界识别装置
- 车辆用外界识别装置及使用了该装置的车辆控制系统