一种基于分数阶积分的深度图像去噪算法
文献发布时间:2023-06-19 18:32:25
技术领域
本发明涉及图像数据处理技术领域,尤其涉及一种基于分数阶积分的深度图像去噪算法。
背景技术
传统的深度图像的去噪算法更多关注缺失的深度数据的填充以及深度图像边缘的有效处理,对于深度图像有效数据在随机噪声干扰下的去噪算法也主要关注在灰度图像下的处理效果,没有脱离传统的图像处理范畴,缺乏对去噪后的深度图像进行点云转换后的去噪效果评估。
深度图像的主要的获取方式有立体匹配、激光雷达、深度相机等途径,其中深度相机可以实时获取深度图像。深度相机获取的深度图像存在分辨率低及质量不高的问题,深度图像的传统去噪算法分为无辅助滤波去噪和有辅助滤波去噪,现有技术中部分方案在深度图像的去噪处理中应用了深度学习的方法,主要是利用辅助的光学强度数据或者RGB图像进行深度学习的结合及对深度图像数据进行去噪处理,主要的空洞填充。当前并没有最佳的深度图像的处理方法,特别是无辅助的深度图像去噪算法在边缘平滑的过程中也破坏了合理的数据;图像去噪算法主要是一个模糊的过程,在去噪的过沉重也模糊了边缘及纹理信息,边缘和纹理是深度图像的重要组成部分,现有技术中存在将分阶微分应用到深度图像的去噪领域的方案,研究结论表明分数阶微积分在深度图像的去噪相比中值滤波具有更好的滤波效果,但是去噪效果仍需要进一步改善。
中国专利公开号:CN103325100A。公开了一种基于分数阶热扩散方程的图像去噪滤波器,基于一种特殊分数阶热扩散方程去噪算法来实现对图像的分数阶、非线性、多尺度去噪。本发明涉及的分数阶微积分的阶次v1和v2不是传统的整数阶,而是非整数阶,工程应用中一般取分数或有理小数。该滤波器是采用微分器、微分器、微分器、v2-2幂方器、乘法器一、乘法器二、微分器、微分器、加法器一、乘法器三、λn发生器、乘法器四、加法器二、乘法器五、乘法器六和加法器三以级联方式构成的。由此可见所述基于分数阶热扩散方程的图像去噪滤波器存在以下问题:在去噪的过程中对于纹理细节和图像边缘的保留不足导致的去噪效果降低。
发明内容
为此,本发明提供一种基于分数阶积分的深度图像去噪算法,用以克服现有技术中由于在去噪的过程中对于纹理细节和图像边缘的保留不足导致的去噪效果降低的问题。
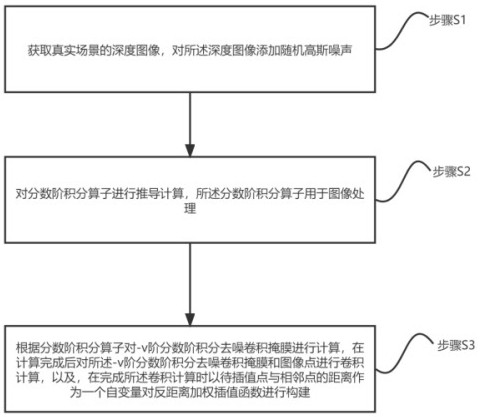
为实现上述目的,本发明提供一种基于分数阶积分的深度图像去噪算法,包括:步骤S1,获取真实场景的深度图像,对所述深度图像添加随机高斯噪声;步骤S2,对分数阶积分算子进行推导计算,所述分数阶积分算子用于图像处理;
步骤S3,根据分数阶积分算子对-v阶分数阶积分去噪卷积掩膜进行计算,在计算完成后对所述-v阶分数阶积分去噪卷积掩膜和图像点进行卷积计算,以及,在完成所述卷积计算时以待插值点与相邻点的距离作为一个自变量对反距离加权插值函数进行构建。
进一步地,所述步骤S2包括:步骤S21,通过对整数阶的差分近似递推求极限以求得G-L微分定义公式;步骤S22,根据所述G-L微分定义公式对G-L的-v阶次积分表达式进行推导,其中v≥0;步骤S23,根据所述G-L的-v阶次积分表达式对一维信号的-v阶次分数阶积分的等效表达式和分数阶积分算子沿x轴方向和y轴方向的数值计算表达式进行推导。
步骤S21,引入分数阶微积分的G-L(Griimwald-Letnikov)定义,通过对整数阶的差分近似递推求极限以求得G-L微分定义公式;步骤S22,根据所述G-L微分定义公式对G-L的-v阶次积分表达式进行推导,其中v≥0;步骤S23,根据所述G-L的-v阶次积分表达式对一维信号的-v阶次分数阶积分的等效表达式和分数阶积分算子沿x轴方向和y轴方向的数值计算表达式进行推导。
进一步地,在所述步骤S21中,所述G-L微分定义公式为:
其中,v为分数阶积分阶次,h为微积分步长,
其中,
进一步地,在所述步骤S22中,所述对G-L的-v阶次积分表达式进行推导的具体过程为:根据Gamma函数将
所述Gamma函数的表达式为
所述-v的二项式系数计算公式为:
所述G-L的-v阶次积分表达式为:
进一步地,在所述步骤S23中,根据所述G-L的-v阶次积分表达式对一维信号的-v阶次分数阶积分的等效表达式的具体推导过程为:定义一维信号的持续区间为,按照单位h=1等分,则
所述分数阶积分算子沿x轴方向和y轴方向的数值计算表达式的推导过程为:利用傅里叶变换的可分离性将分数阶积分从一维推广到二维,将二维图像信号I(x,y)按照单位时间进行h=1等分以得到x轴和y轴的分数阶微积分公式,根据公式(6)的等效表达式对G-L定义下的偏分数阶微积分近似解进行计算并求出分数阶积分算子沿着x轴和y轴方向的数值计算表达式,其中,
x轴方向表达式为:
y轴方向表达式为:
所述x轴方向表达式和y轴方向表达式还等价于:
进一步地,在所述步骤S3中,根据分数阶积分算子对-v阶分数阶积分去噪卷积掩膜进行计算的具体过程包括:根据分数阶积分算子沿x轴方向和y轴方向的数值计算表达式对两个轴方向的近似解进行计算,对剩余6个方向进行推广得到8个方向的分数阶积分算子滤波器并求得-v阶分数阶积分算子系数R,根据所述-v阶分数阶积分算子系数对-v阶分数阶积分去噪卷积掩膜进行计算,其中,
所述两个轴方向的近似解的计算过程为,设置N=3,表示掩膜模板为3×3矩阵,根据公式(9)和(10)得到两个轴方向的近似解,所述两个轴方向的近似解为:
所述-v阶分数阶积分算子系数R的计算公式为:
所述-v阶分数阶积分去噪卷积掩膜的系数为
其中,定义
进一步地,在对分数阶积分去噪卷积掩膜的系数确定后对掩膜与图像点的卷积进行计算,其中,根据8个方向的3×3掩膜a
进一步地,当完成对于卷积的计算时,进行反距离加权操作,所述反距离加权操作以待插值点与样本点间的距离为权重因子进行加权求和,首先进行待插值点与相邻点距离的计算,所述待插值点与相邻点的距离的标准计算公式为:
进一步地,在完成对于所述待插值点与相邻点的距离的计算时根据距离计算结果对反距离加权插值函数进行确定,其中,所述反距离加权插值函数记为
其中,W
进一步地,在完成对于所述反距离加权插值函数的计算时,将所述公式(9)引入到深度图像的数据中,并引入均衡参数φ,并根据φ计算得到待插点距离实际公式,其中,所述待插点距离实际公式为:
其中,d(x,y)为待滤波图像点(x,y)的深度值,d
在完成对于所述待插点距离实际公式的计算时,根据公式(11)和公式(12)对8个方向的加权插值后的第二插值函数进行确定,设定φ=1,其中,所述第二插值函数的计算公式为:
与现有技术相比,本发明的有益效果在于,本发明通过设置的对深度图像的分数阶积分去噪模型进行优化,在加权算法引入反距离加权,改进后的分数阶积分去噪模型具备更好的深度图像去噪效果,在降噪过程中保持了对纹理信息和边缘的特性,通过多次迭代对噪声图像进行连续的细微调整,从而有效的去除了噪声;同时,在三维重建方面,本发明提出的算法可以增强从深度相机输出的深度图像;以及,通过在深度图像是一个有序的距离值的条件下将空间距离值作为一个自变量构建一个反距离加权插值函数以实现边缘及剧变点的有效处理,实现了更好的噪声滤波效果,保留了更多的纹理细节,实现了对于图像边缘和纹理信息的保存和去噪效果的提升。
进一步地,本发明所述算法通过设置的步骤S21、步骤S22以及步骤S23,通过对所述G-L的-v阶次积分表达式进行推导、对一维信号的-v阶次分数阶积分的等效表达式以及和分数阶积分算子沿x轴方向和y轴方向的数值计算表达式进行推导,降低了由于对针对适用于图像处理的分数阶积分算子的计算不准确对去噪效果的影响,进一步实现了对于图像边缘和纹理信息的保存和去噪效果的提升。
进一步地,本发明所述算法通过设置的G-L微分定义公式,对适用于图像处理的分数阶积分算子进行更准确计算,进一步实现了对于图像边缘和纹理信息的保存和去噪效果的提升。
进一步地,本发明所述算法通过设置的对-v阶次积分表达式进行推导的过程以及设置的Gamma函数、-v的二项式系数计算公式以及G-L的-v阶次积分表达式,降低了由于对积分表达式的计算不准确对于去噪效果的影响,进一步实现了对于图像边缘和纹理信息的保存和去噪效果的提升。
进一步地,本发明所述算法通过设置的x轴方向表达式和y轴方向的表达式对分数阶积分算子进行精准确定和一维信号的-v阶次分数阶积分的等效表达式的精准确定,进一步实现了对于图像边缘和纹理信息的保存和去噪效果的提升。
进一步地,本发明所述算法通过设置的根据分数阶积分算子对-v阶分数阶积分去噪卷积掩膜进行计算的具体过程,通过对适用于图像处理的积分算子进行精准计算得出的分数阶积分去噪掩膜,进一步实现了对于图像边缘和纹理信息的保存和去噪效果的提升。
进一步地,本发明所述算法通过在深度图像的处理上考虑到深度图像是一个有序的距离值,空间距离值作为一个自变量构建一个反距离加权插值函数,实现边缘及剧变点的有效处理,进一步实现了对于图像边缘和纹理信息的保存和去噪效果的提升。
进一步地,本发明所述算法通过将深度图像作为一个空间距离图像,相邻点的差值是平面点Z轴的差值,反距离加权目的是为一个待插值点估算一个合理值时,每个相邻点都存在一种局部影响,反距离加权为以待插值点与样本点间的距离为权重因子进行加权求和,离得越近的样本点被赋予的权重会越大,而权重却作为距离的函数而减小,进一步实现了对于图像边缘和纹理信息的保存和去噪效果的提升。
进一步地,本发明所述算法通过根据距离计算结果对反距离加权插值函数进行确定,降低了由于对反距离加权插值函数的计算不准确对于图像边缘和纹理信息的保存效果,进一步实现了对于图像边缘和纹理信息的保存和去噪效果的提升。
进一步地,本发明所述算法通过将公式(9)引入到深度图像的数据中,并引入均衡参数φ,以对待插点距离实际公式和对8个方向的加权插值后的第二插值函数进行确定,进一步实现了对于图像边缘和纹理信息的保存和去噪效果的提升。
附图说明
图1为本发明实施例基于分数阶积分的深度图像去噪算法的整体流程图;
图2为本发明实施例基于分数阶积分的深度图像去噪算法的用于验证分数阶积分反距离去算法的流程图;
图3为本发明实施例基于分数阶积分的深度图像去噪算法的分数阶积分去噪和中值滤波的去噪效果图;
图4为本发明实施例基于分数阶积分的深度图像去噪算法的分数阶积分去噪和中值滤波的另一去噪效应图;
图5为本发明实施例基于分数阶积分的深度图像去噪算法的分数阶积分滤波器的去噪结果图;
图6为本发明实施例基于分数阶积分的深度图像去噪算法的分数阶积分去噪卷积掩膜图。
具体实施方式
为了使本发明的目的和优点更加清楚明白,下面结合实施例对本发明作进一步描述;应当理解,此处所描述的具体实施例仅仅用于解释本发明,并不用于限定本发明。
下面参照附图来描述本发明的优选实施方式。本领域技术人员应当理解的是,这些实施方式仅仅用于解释本发明的技术原理,并非在限制本发明的保护范围。
请参阅图1、图2、图3、图4、图5以及图6所示,其分别为本发明实施例基于分数阶积分的深度图像去噪算法的整体流程图、用于验证分数阶积分反距离去躁算法的流程图、分数阶积分去噪和中值滤波的去噪效果图、分数阶积分去噪和中值滤波的另一去噪效应图、分数阶积分滤波器的去噪结果图以及分数阶积分去噪卷积掩膜图。本发明实施例一种基于分数阶积分的深度图像去噪算法,包括:
步骤S1,获取真实场景的深度图像,对所述深度图像添加随机高斯噪声;
步骤S2,对分数阶积分算子进行推导计算,所述分数阶积分算子用于图像处理;
步骤S3,根据分数阶积分算子对-v阶分数阶积分去噪卷积掩膜进行计算,在计算完成后对所述-v阶分数阶积分去噪卷积掩膜和图像点进行卷积计算,以及,在完成所述卷积计算时以待插值点与相邻点的距离作为一个自变量对反距离加权插值函数进行构建。
本发明通过设置的对深度图像的分数阶积分去噪模型进行优化,在加权算法引入反距离加权,改进后的分数阶积分去噪模型具备更好的深度图像去噪效果,在降噪过程中保持了对纹理信息和边缘的特性,通过多次迭代对噪声图像进行连续的细微调整,从而有效的去除了噪声;同时,在三维重建方面,本发明提出的算法可以增强从深度相机输出的深度图像;以及,通过在深度图像是一个有序的距离值的条件下将空间距离值作为一个自变量构建一个反距离加权插值函数以实现边缘及剧变点的有效处理,实现了更好的噪声滤波效果,保留了更多的纹理细节,实现了对于图像边缘和纹理信息的保存和去噪效果的提升。
具体而言,所述步骤S2包括:
步骤S21,通过对整数阶的差分近似递推求极限以求得G-L微分定义公式;
步骤S22,根据所述G-L微分定义公式对G-L的-v阶次积分表达式进行推导,其中v≥0;
步骤S23,根据所述G-L的-v阶次积分表达式对一维信号的-v阶次分数阶积分的等效表达式和分数阶积分算子沿x轴方向和y轴方向的数值计算表达式进行推导。
进一步地,本发明所述算法通过设置的步骤S21、步骤S22以及步骤S23,通过对所述G-L的-v阶次积分表达式进行推导、对一维信号的-v阶次分数阶积分的等效表达式以及和分数阶积分算子沿x轴方向和y轴方向的数值计算表达式进行推导,降低了由于对针对适用于图像处理的分数阶积分算子的计算不准确对去噪效果的影响,进一步实现了对于图像边缘和纹理信息的保存和去噪效果的提升。
请继续参阅图1所示,在所述步骤S21中,所述G-L微分定义公式为:
其中,v为分数阶积分阶次,h为微积分步长,
其中,
进一步地,本发明所述算法通过设置的G-L微分定义公式,对适用于图像处理的分数阶积分算子进行更准确计算,进一步实现了对于图像边缘和纹理信息的保存和去噪效果的提升。
请继续参阅图1所示,在所述步骤S22中,所述对G-L的-v阶次积分表达式进行推导的具体过程为:根据Gamma函数将
所述Gamma函数的表达式为
所述-v的二项式系数计算公式为:
所述G-L的-v阶次积分表达式为:
进一步地,本发明所述算法通过设置的对-v阶次积分表达式进行推导的过程以及设置的Gamma函数、-v的二项式系数计算公式以及G-L的-v阶次积分表达式,降低了由于对积分表达式的计算不准确对于去噪效果的影响,进一步实现了对于图像边缘和纹理信息的保存和去噪效果的提升。
请继续参阅图1所示,在所述步骤S23中,根据所述G-L的-v阶次积分表达式对一维信号的-v阶次分数阶积分的等效表达式的具体推导过程为:定义一维信号
所述分数阶积分算子沿x轴方向和y轴方向的数值计算表达式的推导过程为:利用傅里叶变换的可分离性将分数阶积分从一维推广到二维,将二维图像信号I(x,y)按照单位时间进行h=1等分以得到x轴和y轴的分数阶微积分公式,根据公式(6)的等效表达式对G-L定义下的偏分数阶微积分近似解进行计算并求出分数阶积分算子沿着x轴和y轴方向的数值计算表达式,其中,
x轴方向表达式为:
y轴方向表达式为:
所述x轴方向表达式和y轴方向表达式还等价于:
进一步地,本发明所述算法通过设置的x轴方向表达式和y轴方向的表达式对分数阶积分算子进行精准确定和一维信号的-v阶次分数阶积分的等效表达式的精准确定,进一步实现了对于图像边缘和纹理信息的保存和去噪效果的提升。
请继续参阅图1和图6所示,在所述步骤S3中,根据分数阶积分算子对-v阶分数阶积分去噪卷积掩膜进行计算的具体过程包括:根据分数阶积分算子沿x轴方向和y轴方向的数值计算表达式对两个轴方向的近似解进行计算,对剩余6个方向进行推广得到8个方向的分数阶积分算子滤波器并求得-v阶分数阶积分算子系数R,根据所述-v阶分数阶积分算子系数对-v阶分数阶积分去噪卷积掩膜进行计算,其中,
所述两个轴方向的近似解的计算过程为,设置N=3,表示掩膜模板为3×3矩阵,根据公式(9)和(10)得到两个轴方向的近似解,所述两个轴方向的近似解为:
所述-v阶分数阶积分算子系数R的计算公式为:
所述-v阶分数阶积分去噪卷积掩膜的系数为
其中,定义
进一步地,本发明所述算法通过设置的根据分数阶积分算子对-v阶分数阶积分去噪卷积掩膜进行计算的具体过程,通过对适用于图像处理的积分算子进行精准计算得出的分数阶积分去噪掩膜,进一步实现了对于图像边缘和纹理信息的保存和去噪效果的提升。
请继续参阅图1所示,在对分数阶积分去噪卷积掩膜的系数确定后对掩膜与图像点的卷积进行计算,其中,根据8个方向的3×3掩膜a
进一步地,本发明所述算法通过在深度图像的处理上考虑到深度图像是一个有序的距离值,空间距离值作为一个自变量构建一个反距离加权插值函数,实现边缘及剧变点的有效处理,进一步实现了对于图像边缘和纹理信息的保存和去噪效果的提升。
请继续参阅图1所示,当完成对于卷积的计算时,进行反距离加权操作,所述反距离加权操作以待插值点与样本点间的距离为权重因子进行加权求和,首先进行待插值点与相邻点距离的计算,所述待插值点与相邻点的距离的标准计算公式为:
进一步地,本发明所述算法通过将深度图像作为一个空间距离图像,相邻点的差值是平面点Z轴的差值,反距离加权目的是为一个待插值点估算一个合理值时,每个相邻点都存在一种局部影响,反距离加权为以待插值点与样本点间的距离为权重因子进行加权求和,离得越近的样本点被赋予的权重会越大,而权重却作为距离的函数而减小,进一步实现了对于图像边缘和纹理信息的保存和去噪效果的提升。
请继续参阅图1所示,在完成对于所述待插值点与相邻点的距离的计算时根据距离计算结果对反距离加权插值函数进行确定,其中,所述反距离加权插值函数记为
其中,W
进一步地,本发明所述算法通过根据距离计算结果对反距离加权插值函数进行确定,降低了由于对反距离加权插值函数的计算不准确对于图像边缘和纹理信息的保存效果,进一步实现了对于图像边缘和纹理信息的保存和去噪效果的提升。
请继续参阅图1所示,在完成对于所述反距离加权插值函数的计算时,将所述公式(9)引入到深度图像的数据中,并引入均衡参数φ,并根据φ计算得到待插点距离实际公式,其中,所述待插点距离实际公式为:
其中,d(x,y)为待滤波图像点(x,y)的深度值,d
在完成对于所述待插点距离实际公式的计算时,根据公式(11)和公式(12)对8个方向的加权插值后的第二插值函数进行确定,设定φ=1,其中,所述第二插值函数的计算公式为:
进一步地,本发明所述算法通过将公式(9)引入到深度图像的数据中,并引入均衡参数φ,以对待插点距离实际公式和对8个方向的加权插值后的第二插值函数进行确定,进一步实现了对于图像边缘和纹理信息的保存和去噪效果的提升。
实施例1
请参阅图2所示,其为本实施例1在所述算法的基础上提供一种用于验证分数阶积分反距离去躁算法的流程图,本实施例对深度图像的仿真试验及分析,本实施例采用图2的流程验证基于分数阶积分-反距离加权去噪算法的去噪效果,并对比中值滤波算法的去噪效果。从仿真实验结果能够看到,中值滤波算法虽然在边缘问题及去噪能力在允许范围内,但丢失图像的关键信息的概率较大。从PSNR结果也可以看出数据关键信息丢失了,PSNR有
算法验证流程参考图2所示,对深度图像添加高斯噪声,分别采用中值滤波和分数阶积分-反距离加权去噪算法的去噪。分数阶积分-反距离加权去噪算法还采用不同阶次的验证最佳阶次,使用PSNR评估最佳分数阶去噪阶次;从仿真实验数据结果得到
本实施例图3为分数阶积分去噪和中值滤波的去噪效果图,其中(a)图为RGB图像;(b)图为深度伪彩色图;(c)图为无噪声点云图像;(d)图为添加噪声的点云图像,PSNR=43.239 dB;(e)图为分数积分去噪滤波的点云图像(ν=−0.4,PSNR=56.191 dB);(f)图为深度图像经过中值滤波去噪后的点云图像(PSNR=37.321 dB)。
采用更多的图像进行算法验证,从实验数据中获取最佳的分数阶积分阶次。对数据集进行分数阶积分-反距离加权去噪算法去噪,滤波的阶次范围是
本实施例中图5为分数阶积分滤波器的去噪结果图,从图5中的8个实验的数据说明分数阶积分去噪算子可以实现6到13dB的信噪比改善,去噪效果显著。从去噪后的深度图像转换成点云图进行对比分析,绝大部分噪声得到了有效的去除,剩下的噪声点与中值滤波的剩余噪声点数量很接近。实验结果表明分数阶积分-反距离加权去噪算法在深度图像的噪声滤波上具有明显提升效果。
实施例2
请参阅图4所示,其为本实施例2基于实验室现场对深度图像去噪效果进行显示的分数阶积分去噪和中值滤波的去噪效应图,本实施例2在实验室构建一个深度图像处理环境,采用的深度相机(Intel Realsense Depth Camera D435)来获取深度图像进行本发明提出的算法有效性验证,操作系统环境是macOS Ventura,CPU采用Apple M2,采集的深度图像添加高斯噪声,使用本发明方案改进后的分数阶积分-反距离加权去噪模型对噪声进行处理,分数阶阶次使用
其中,(a)图为RGB图像;(b)图为深伪彩色图;(c)图为无噪声点云图像;(d)图为添加噪声的点云图像,PSNR=43.749 dB;(e)图为分数积分去噪滤波的点云图像(ν=−0.5,PSNR=55.598 dB);(f)图为深度图像经过中值滤波和去噪后的点云图像(PSNR=34.708 dB)。
本实验的结果表明使用反距离加权改进后的分数阶积分去噪算法可以实现更低的有效信息损失,分数阶积分去噪后的信噪比(55.598dB)高于中值滤波这种经典滤波算法的信噪比(34.708dB),从两种算法的PSNR的差值可以看到有大约12dB改善,纹理细节及边缘得到了很好的保留。这证明本发明方案提出的算法在真实环境下也具备良好的去噪能力。
至此,已经结合附图所示的优选实施方式描述了本发明的技术方案,但是,本领域技术人员容易理解的是,本发明的保护范围显然不局限于这些具体实施方式。在不偏离本发明的原理的前提下,本领域技术人员可以对相关技术特征做出等同的更改或替换,这些更改或替换之后的技术方案都将落入本发明的保护范围之内。
以上所述仅为本发明的优选实施例,并不用于限制本发明;对于本领域的技术人员来说,本发明可以有各种更改和变化。凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
- 基于分数阶微积分数算法的网络入侵安全数据处理方法
- 基于分数阶对偶拥塞算法的分数阶PID控制器建立方法