一种用于磁编码器的校准方法,装置和磁编码器
文献发布时间:2023-06-19 11:37:30
技术领域
本发明涉及电机编码器技术领域,具体涉及一种用于磁编码器的校准方法,装置和磁编码器。
背景技术
编码器(Encoder)是一种新型的角度或者位移测量装置,结构简单,高速回转响应速度快,具有不受油淀、尘埃和结构的影响,非接触式、体积小、成本低、结构简单以及可靠性高等特点,广泛应用于工业、军事、航空航海及通信等领域的角度测量。
目前应用于绝对角度测量的磁编码器一般为在轴式测量,要求编码器安装在被测转轴的轴端面上,这样的好处是磁铁产生的磁场在磁传感器处为均匀分布,磁传感器角度输出与电机实际的机械角度是线性关系,这样基本可以对磁编码器不做校准。离轴式安装结构测量克服了在轴式测量的安装限制,但普通的磁传感器离轴安装时输出角度存在大于50%的精度误差,无法直接使用,需先对其进行校准,现有的校准方法一般采用基于模型或者线性插值的校准方法,但只做校准会严重降低低编码器分辨率。
发明内容
针对上述技术问题,本发明实施例提供了一种用于磁编码器的校准方法、装置和磁编码器,可以用于中空结构,具有较高的精确度,分辨率和稳定性。
本发明实施例的第一方面提供一种用于磁编码器的校准方法,所述磁编码器包括磁环,所述磁环设置于电机的输出轴上并跟随输出轴自转,磁环外侧设置有第一传感器和第二传感器,第一传感器和第二传感器之间的夹角为90°,所述校准方法包括:分别获取第一传感器和第二传感器检测到的检测位置以及待校准的校准参考位置;根据所述检测位置与待校准参考位置对第一传感器和第二传感器进行线性插值校准;对第一传感器和第二传感器的检测位置进行融合补偿校准。
可选地,所述校准方法包括:驱动磁环以一定速度匀速转动。
可选地,所述待校准的校准参考位置通过空间矢量脉宽调制控制电机的转子的电角度来获取。
可选地,所述磁环为径向充磁的环状结构,所述磁环中设有一对南北磁极。
本发明实施例第二方面提供了一种用于磁编码器的校准装置,所述磁编码器包括磁环,所述磁环设置于电机的输出轴上并跟随输出轴自转,磁环外侧设置有第一传感器和第二传感器,第一传感器和第二传感器之间的夹角为90°,所述校准装置包括:控制器,所述控制器用于获取第一传感器和第二传感器检测的检测位置以及待校准的校准参考位置;并根据所述检测位置与校准参考位置对第一传感器和第二传感器进行线性插值校准;对第一传感器和第二传感器的检测位置进行融合补偿校准;存储器,用于预先存储线性插值校准的校准表。
本发明实施例第二方面提供了一种磁编码器,所述磁编码器包括:磁环,设置于电机的输出轴上并跟随输出轴自转;以及第一传感器和第二传感器,设置于所述磁环外侧,第一传感器和第二传感器之间的夹角为90°。
可选地,所述磁环为径向充磁的环状结构,所述磁环中设有一对南北磁极。
可选地,所述磁编码器还包括信号处理单元,所述信号处理单元分别连接第一传感器和第二传感器,接收第一传感器和第二传感器传输的检测信号并处理后获取磁环的位置信息。
可选地,所述磁编码器还包括PCB板,所述第一传感器,第二传感器和信号处理单元设在在所述PCB板上。
可选地,所述第一传感器和第二传感器包括霍尔传感器或磁阻传感器。
本发明实施例提供的技术方案中,第一传感器和第二传感器之间的夹角为90°,第一传感器和第二传感器的检测位置进行融合补偿校准,因此相对于现有技术,本发明实施例采用一对极的磁环,磁环为中空结构,磁环和两个传感器配合,提高了检测精度和分辨率,同时提高了稳定性。
附图说明
图1为本发明电磁编码器的安装示意图;
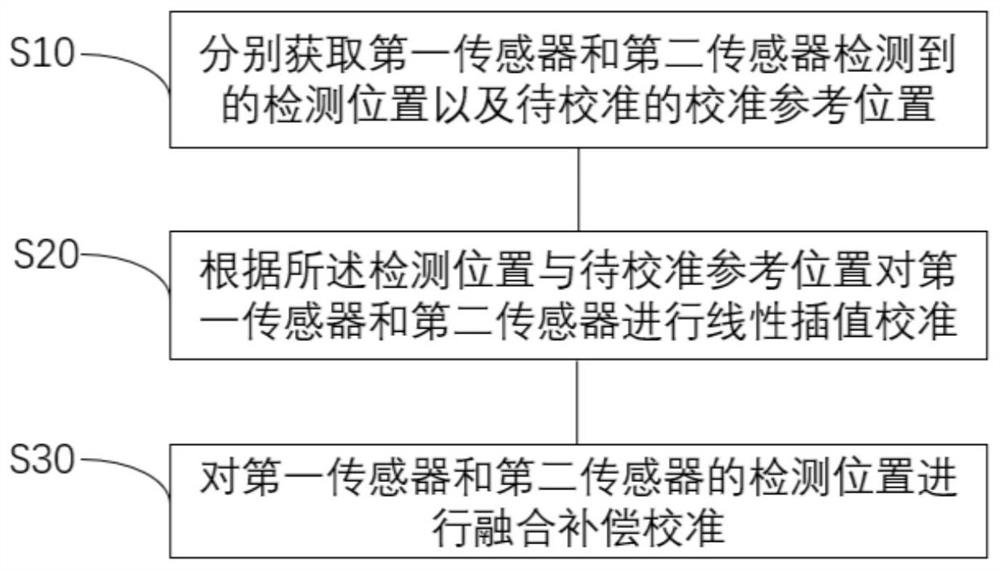
图2为本发明一种用于磁编码器的校准方法的流程示意图;
图3为本发明一种用于磁编码器的校准方法的另一实施例的流程示意图。
具体实施方式
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域技术人员在没有作出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
本申请一实施例提供了一种磁编码器,包括磁环,第一传感器和第二传感器,磁环设置于电机的输出轴上并跟随输出轴自转;第一传感器和第二传感器设置于所述磁环外侧,第一传感器和第二传感器之间的夹角为90°。
参考图1所示,磁环10安装在电机输出轴2的后端上,随输出轴2同步转动,磁环10为径向充磁的环状结构,且磁环10的中心与输出轴2的轴心同心,保证磁环10在转动过程中外圈各位置始终在同一路径上转动。
第一传感器31和第二传感器32沿着磁环10的外圈设置,以感应磁环10的磁场,并转换成相应的电压信号,第一传感器31和第二传感器32与磁环10之间没有接触,两个传感器依靠输出轴2的转动,感应磁环10的转动位置,进而反应输出轴2的转动位置。第一传感器31和第二传感器32之间的夹角为90°,第一传感器31和第二传感器32到磁环10的外圈的距离相同。
在本发明的其中一实施例中,磁环10中设置有一对南北极,磁编码器还包括信号处理单元,信号处理单元分别连接第一传感器31和第二传感器32,接收第一传感器31和第二传感器32传输的检测信号并处理后获取磁环10的位置信息。
在本发明的其中一实施例中,磁编码器还包括PCB板,所述第一传感器31,第二传感器32和信号处理单元设在在所述PCB板上。具体的,第一传感器31和第二传感器32可以是霍尔传感器,也可是磁阻传感器或其他传感器,PCB板上设有过孔,所述电机的输出轴2外端可以穿过所述过孔,也可以不穿过所述过孔,磁环10和PCB板上的传感器是非接触式安装。
本发明采用两个相互垂直的第一传感器31和第二传感器32,当有外界磁干扰的情况下,信号处理单元对第一传感器31检测的位置信号和第二传感器32检测的位置信号进行修正,提高检测位置的精确度。
本申请一实施例提供了一种用于磁编码器的校准装置,其与电机配合,包括磁环,第一传感器,第二传感器,控制器和存储器,磁环设置于电机的输出轴上并跟随输出轴自转,磁环外侧设置有第一传感器和第二传感器,第一传感器和第二传感器之间的夹角为90°,控制器用于获取第一传感器和第二传感器检测的检测位置以及待校准的校准参考位置;并根据所述检测位置与校准参考位置对第一传感器和第二传感器进行线性插值校准;对第一传感器和第二传感器的检测位置进行融合补偿校准;所述存储器用于预先存储线性插值校准的校准表。
可以理解的是,存储器内预先存储有线性插值校准的校准表,通过预先设定的机械角度与电机的电角度之间的对应关系,可以在磁编码器检测到该给定机械角度时,能通过上述对应关系来查找到该给定机械角度对应的电机的电角度,如此,通过利用线性插值校准技术能够准确控制电机的电角度,完成磁编码器与电机的电角度之间的校准。
请参考图2所示,本申请一实施例提供了一种用于磁编码器的校准方法,所述校准方法包括:
步骤S10,分别获取第一传感器和第二传感器检测到的检测位置以及待校准的校准参考位置。
本发明根据第一传感器和第二传感器的通信协议获取第一传感器检测的位置信号和第二传感器检测的位置信号,具体的,磁环旋转的时候,在每个传感器位置的磁场会跟随相应的变化,经过第一传感器和第二传感器转换成相对应的电压信号。磁编码器实际使用时,分布在磁环周围的第一传感器和第二传感器感应出各自对应位置的磁场强度,转换成电压信号后提供给信号处理单元,信号处理单元高速的采集第一传感器和第二传感器输出的电压,然后将对采集的电压信号通过空间位置的计算,计算出磁环的实际位置。通过通信的方式输出磁编码器的位置信号给电机控制系统。
在本发明的其中一实施例中,本发明通过电机或者其他方式带动磁环以一定速度匀速旋转,磁保证编码器采集数据间隔和延时一致性。
本发明的校准参考位置可以通过同轴安装的高精度的编码器检测获取,还可以通过空间矢量脉宽调制控制电机的转子的电角度来获取。空间矢量脉宽调制控制(SVPWM(Space Vector Pulse Width Modulation)放开可以准确的控制电机的转子旋转至不同位置的电角度,随后,基于该检测角度与待校准的校准参考位置之间的角度差值来改变转子的电角度,直至该差值处于预设阈值范围内。上述通过空间矢量脉宽调制控制改变电机的转子的电角度的方式来进行校准,可以无需单独外接角度传感器,从而降低校准过程的成本,简化校准步骤。
步骤S20,根据所述检测位置与待校准参考位置对第一传感器和第二传感器进行线性插值校准。
在本发明的其中一实施例中,上述步骤S20具体如下:
步骤S21,通过电机带动磁环以一定速度匀速旋转;
步骤S22,获取第一传感器和第二传感器旋转一圈的反馈角度;
步骤S23,根据反馈角度和待校准参考位置进行线性插值校准。
步骤S30,对第一传感器和第二传感器的检测位置进行融合补偿校准。具体地,计算第一传感器和第二传感器旋转一圈的分辨率曲线,根据分辨率曲线进行融合补偿。
本发明第一传感器和第二传感器相互呈90°放置,当磁环旋转磁感线和第一传感器平行时,此时,磁感线和第二传感器垂直,也就是当第一传感器测量分辨率最低的时候,第二传感器刚好处于测量分辨率最高处,当第二传感器测量分别率最低的时候,第一传感器刚好处于测量分辨率最高处,第一传感器和第二传感器配合,使得磁环旋转一周的任何角度总有一个传感器的分辨率是较高的。
本发明的用于磁编码器的校准方法,通过一对极的磁环和两个传感器配合,提高了检测精度和分辨率,同时提高了稳定性。
以上实施例仅用以说明本发明的技术方案,而非对其限制;尽管参照前述实施例对本发明进行了详细的说明,本领域的普通技术人员应当理解:其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分技术特征进行等同替换;而这些修改或者替换,并不使相应技术方案的本质脱离本发明各实施例技术方案的精神和范围。
- 一种用于磁编码器的校准方法,装置和磁编码器
- 磁编码器及其校准方法和校准装置、电机以及无人飞行器