一种基于功能性电刺激的体外反馈式模块化康复外骨骼
文献发布时间:2023-06-19 18:30:43
技术领域
本发明涉及康复设备技术领域,尤其涉及一种基于功能性电刺激的体外反馈式模块化康复外骨骼。
背景技术
脑卒中是指突然发生的、有脑血管病变引起的局限性或全脑功能障碍,持续时间超过24小时或引起死亡的临床综合征。脑卒中通常会造成患者运动功能障碍、言语障碍和感觉功能障碍,给患者的学习生活带来极大的不便,康复外骨骼已成为脑卒中患者康复治疗的重要设备,尽管康复外骨骼可辅助患者步行,但对恢复肌肉功能作用有限。
功能性电刺激是利用一定强度的低频脉冲电流刺激一组或多组肌肉,诱发肌肉运动或模拟正常的自主运动,实现改善或恢复被刺激肌肉功能的目的,此外,患者通过运动想象能够促进感觉运动皮层功能重组或重建,因而也被用于脑损伤肢体瘫痪患者的主动康复训练治疗,将康复外骨骼、功能性电刺激和运动想象有效结合,在辅助患者运动的同时可辅助恢复肌肉功能,甚至有助于患者脑功能的康复,对于患者的康复治疗意义重大。
目前康复医院或康复中心采用电刺激联合外骨骼辅助步行,预定式的功能电刺激与个体激活信息不能匹配,无法实现根据患者实际情况调节电刺激,进而导致康复效果不理想。
发明内容
本发明的目的在于提供一种基于功能性电刺激的体外反馈式模块化康复外骨骼,旨在解决现有电刺激联合外骨骼辅助步行,无法根据患者情况调节电刺激,影响康复效果的问题。
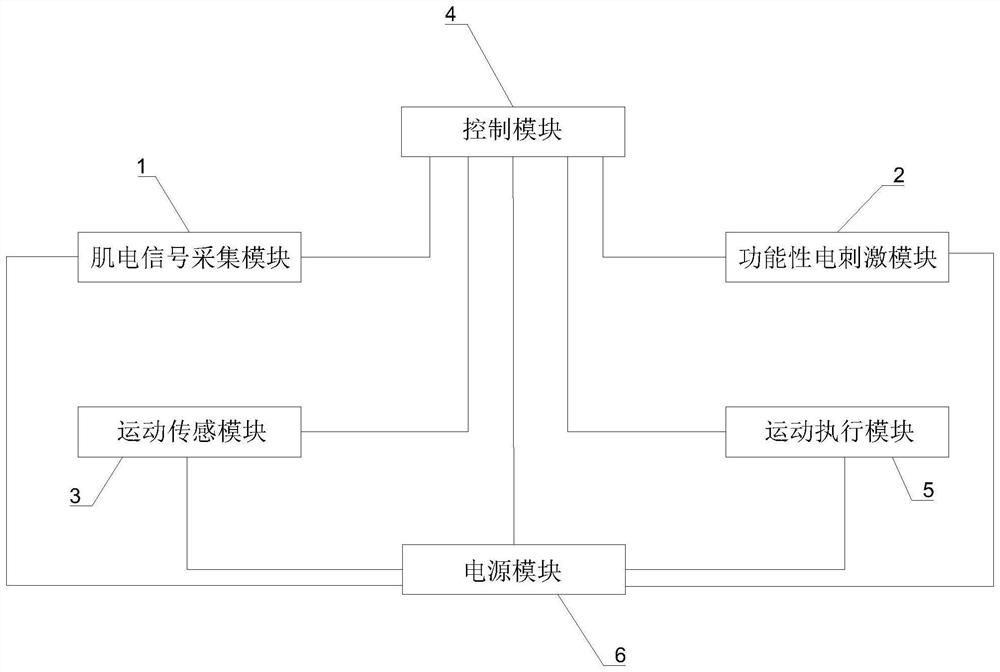
为实现上述目的,第一方面,本发明提供了功能性电刺激的体外反馈式模块化康复外骨骼,所述外骨骼包括肌电信号采集模块、功能性电刺激模块、运动传感模块、控制模块、运动执行模块和电源模块,所述控制模块分别与所述肌电信号采集模块、所述功能性电刺激模块、所述运动传感模块、所述运动执行模块和所述电源模块连接;
所述肌电信号采集模块,用于采集患者健侧运动过程中的表面肌电信号,并将所述表面肌电信号传输给所述控制模块;
所述功能性电刺激模块,用于接收控制模块的控制信号信号,并施加给患者患侧电刺激信号;
所述运动传感模块,用于采集患者运动过程中的运动信号,并将所述运动信号传输给所述控制模块;
所述控制模块,基于所述表面肌电信号、所述功能性电刺激信号和所述运动信号,并基于上述信号生成算法模型和控制信号,所述控制信号控制所述运动执行模块和所述功能性电刺激模块运作;
所述运动执行模块,接收所述控制信号实现输出的运动轨迹;
所述电源模块,用于对所述肌电信号采集模块、所述功能性电刺激模块、所述运动传感模块、所述控制模块和所述运动执行模块供电。
其中,所述外骨骼的本体形式包括上肢或下肢的单侧外骨骼、双侧外骨骼和单关节外骨骼三种形式。
第二方面,本发明还提供了功能性电刺激的体外反馈式模块化康复外骨骼训练方法,包括以下步骤:
根据患者情况选择不同的训练康复阶段和运动场景,得到康复方案;
基于康复方案预设康复轨迹,所述运动执行模块带动患者健侧肢体开展运动,并利用所述肌电信号采集模块采集健侧肢体的肌电信号,同时所述运动传感模块采集健侧肢体的第一运动信号,并建立健侧运动-肌电模型和健侧肌电-运动模型;
所述运动执行模块带动患者患侧进行所述第一运动轨迹,同时所述功能性电刺激模块给患侧肌肉功能性电刺激,患者不断想象所述第一运动轨迹的完成流程,并利用所述运动传感模块采集患侧肢体的第二运动信号;
根据所述第二运动信号以所述健侧肌电-运动模型为基础建立患侧肌电-运动模型,所述运动执行模块调整患侧第二运动轨迹直至等于第一运动轨迹时,得到二次功能性电刺激信号;
基于所述二次功能性电刺激信号和所述第一运动轨迹制定患者强化训练方案进行训练。
其中,所述康复阶段包括康复早期、康复中期和康复后期,所述康复场景包括平躺、坐起、站起、站立、平地行走、坡地行走和上下楼梯。
其中,所述功能性电刺激信号同时包括时域和频域特征。
本发明的一种基于功能性电刺激的体外反馈式模块化康复外骨骼,所述肌电信号采集模块采集患者健侧运动过程中的表面肌电信号,并将所述表面肌电信号传输给所述控制模块,所述功能性电刺激模块接收所述控制模块的控制信号,并施加给患者患侧电刺激信号,所述运动传感模块采集患者运动过程中的运动信号,并所述运动信号传输给所述控制模块,所述控制模块接收上述信号,并生成算法模型和控制信号,所述控制信号控制所述运动执行模块和所述功能性电刺激模块运作,所述运动执行模块接收所述控制信号实所述控制模块输出的运动轨迹,所述电源模块对所述肌电信号采集模块、所述功能性电刺激模块、所述运动传感模块、所述控制模块和所述运动执行模块供电,通过采集患侧运动信号建立出患侧肢体的“患侧肌电-运动模型”,然后调整患侧运动与健侧运动一致得到合适的功能性电刺激和外骨骼辅助轨迹,最后强化患侧肢体康复训练直至完成康复训练方案,该所述外骨骼通过患者不同康复阶段和场景选择,适应患者实际的康复情况,所述外骨骼以运动想象和强化训练为康复理论基础,配合功能性电刺激可有效的弥补单一康复方案的不足。通过所述采集患侧运动信号建立出患侧肢体的“患侧肌电-运动模型”,然后调整患侧运动与健侧运动一致得到合适的功能性电刺激和外骨骼辅助轨迹,在不同的阶段可以防止患者出现肌肉痉挛,提升肌肉力量,实现步态训练,进而促进大脑神经元激活并重塑神经回路,解决现有电刺激联合外骨骼辅助步行,无法根据患者情况调节电刺激,影响康复效果的问题。
附图说明
为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
图1是本发明提供的功能性电刺激的体外反馈式模块化康复外骨骼的系统示意图。
图2是本发明提供的功能性电刺激的体外反馈式模块化康复外骨骼的结构示意图。
图3是本发明提供的功能性电刺激的体外反馈式模块化康复外骨骼训练方法流程图。
1-肌电信号采集模块、2-功能性电刺激模块、3-运动传感模块、4-控制模块、5-运动执行模块、6-电源模块。
具体实施方式
下面详细描述本发明的实施例,所述实施例的示例在附图中示出,其中自始至终相同或类似的标号表示相同或类似的元件或具有相同或类似功能的元件。下面通过参考附图描述的实施例是示例性的,旨在用于解释本发明,而不能理解为对本发明的限制。
实施例一;
请参阅图1至图2,第一方面,本发明提供功能性电刺激的体外反馈式模块化康复外骨骼,所述外骨骼包括肌电信号采集模块1、功能性电刺激模块2、运动传感模块3、控制模块4、运动执行模块5和电源模块6,所述控制模块4分别与所述肌电信号采集模块1、所述功能性电刺激模块2、所述运动传感模块3、所述运动执行模块5和所述电源模块6连接;
所述肌电信号采集模块1,用于采集患者健侧运动过程中的表面肌电信号,并将所述表面肌电信号传输给所述控制模块4;
所述功能性电刺激模块2,用于接收所述控制模块4的控制信号,并施加患者患侧电刺激信号;
所述运动传感模块3,用于采集患者运动过程中的运动信号,并将所述运动信号传输给所述控制模块4;
所述控制模块4,基于所述表面肌电信号、所述电刺激信号和所述运动信号,并基于上述信号生成算法模型和控制信号,所述控制信号控制所述运动执行模块5和所述功能性电刺激模块2运作;
所述运动执行模块5,接收所述控制信号实现输出的运动轨迹;
所述电源模块6,用于对所述肌电信号采集模块1、所述功能性电刺激模块2、所述运动传感模块3、所述控制模块4和所述运动执行模块5供电。
在本实施方案中,所述的肌电信号采集模块1包括电极组和肌电信号处理电路,通过电极组采集患者健侧在运动过程中的表面肌电信号并通过肌电信号处理电路传输给所述控制模块4,所述功能性电刺激模块2包括电极组和电刺激信号生成电路,电刺激信号生成电路接收所述控制器信号生成功能性电刺激信号并通过电极组施加给患侧目标肌肉,所述运动传感模块3包括角度传感器、压力传感器和陀螺仪,用于采集患者运动过程中的运动信号并传输给所述控制模块4,所述控制模块4内置不同康复阶段、运动场景和康复运动轨迹,此外还接收处理各种信号,建立“健侧运动-肌电模型”、“健侧肌电-运动模型”和“患侧肌电-运动模型”,控制外骨骼运动和功能电刺激等功能,所述运动执行模块5包括一体化关节和机械结构,一体化关节接收所述控制模块4的运动信号并驱动机械结构带动患者完成康复运动,所述电源模块6包括电池组和供电电路,用于其它各模块的供电。
进一步的,所述外骨骼的本体形式包括单侧外骨骼、双侧外骨骼和单关节外骨骼三种形式,且不限定为上肢或下肢。
在本实施方案中,本实施例中所述外骨骼的本体形式设定为双侧下肢外骨骼。
请参阅图3,第二方面,本发明还提供了功能性电刺激的体外反馈式模块化康复外骨骼康训练方法,包括以下步骤:
S1根据患者情况选择不同的训练康复阶段和运动场景,得到康复方案;
具体的,所述康复阶段包括康复早期(患者肌肉力量训练,防止患者肌肉痉挛以及关节活动度训练)、康复中期(运动感觉康复和选择性肌肉活动)和康复后期(肌肉力量训练、平衡能力训练和行走步态训练),所述康复场景包括平躺、坐起、站起、站立、平地行走、坡地行走和上下楼梯。
根据患者自身情况,从上述的康复阶段和运动场景选择合适的康复方案,适应患者实际的康复情况,本实施例中的康复方案选择为康复早期的平躺训练,所述控制模块4中已经预设好所述外骨骼在平躺时的下肢康复运动轨迹。
S2基于康复方案预设所述运动执行模块5轨迹带动患者健侧肢体开展运动,并利用所述肌电信号采集模块1采集健侧肢体的肌电信号,同时所述运动传感模块3采集健侧肢体的第一运动信号,并建立健侧运动-肌电模型和健侧肌电-运动模型;
具体的,康复外骨骼根据预设的康复轨迹带动患者健侧肢体开展运动,或健侧自由运动,在运动过程中,利用所述肌电信号采集模块1采集健侧肢体的肌电信号E1,同时由所述运动传感模块3采集健侧肢体的第一运动信号T1,并建立出“健侧运动-肌电模型”:T1=F(E1),同时建立出“健侧肌电-运动模型”:E1=F
S3所述运动执行模块5带动患者患侧进行健侧的所述第一运动轨迹,同时所述功能性电刺激模块2给患侧肌肉功能性电刺激,患者不断想象第一运动轨迹的完成流程,并利用所述运动传感模块3采集患侧肢体的第二运动信号;
具体的,让所述外骨骼带动患侧实现健侧的第一运动轨迹,在运动过程中,同时给患侧相同位置的肌肉以所述功能性电刺激信号E1,并要求患者不断想象该动作的完成流程,由于患者运动功能障碍和电刺激信号,患侧的第二运动轨迹(实际运动轨迹)与理想的所述第一运动轨迹存在误差,此时需要利用所述运动传感模块3采集患侧肢体的实际的所述第二运动轨迹。
S4根据所述第二运动信号以所述健侧肌电-运动模型为基础建立患侧肌电-运动模型,所述运动执行模块5调整患侧第二运动轨迹直至等于第一运动轨迹时,得到二次功能性电刺激信号;
具体的,根据采集到的健侧所述第二运动轨迹(实际运动轨迹),以模型E1=F
S5基于所述二次功能性电刺激信号和所述第一运动轨迹制定患者强化训练方案进行训练。
具体的,按照所述功能性电刺激信号E2和所述第一运动轨迹T1制定患侧强化训练方案,包括康复次数X和康复周期T,在康复周期T内强化训练患侧肢体X次时结束。
以上所揭露的仅为本发明供功能性电刺激的体外反馈式模块化康复外骨骼及训练方法较佳实施例而已,当然不能以此来限定本发明之权利范围,本领域普通技术人员可以理解实现上述实施例的全部或部分流程,并依本发明权利要求所作的等同变化,仍属于发明所涵盖的范围。
- 一种家庭式肌电信号反馈的电刺激肢体康复外骨骼机器人
- 功能性电刺激的上肢康复系统的条件反馈控制方法